
Acceptance of Automated Shuttles—Application and Extension of the UTAUT-2 Model to Wizard-of-Oz Automated Driving in Real-Life Traffic



Abstract
1. Introduction
2. Materials and Methods
2.1. Design
2.2. Sample
2.3. Measures
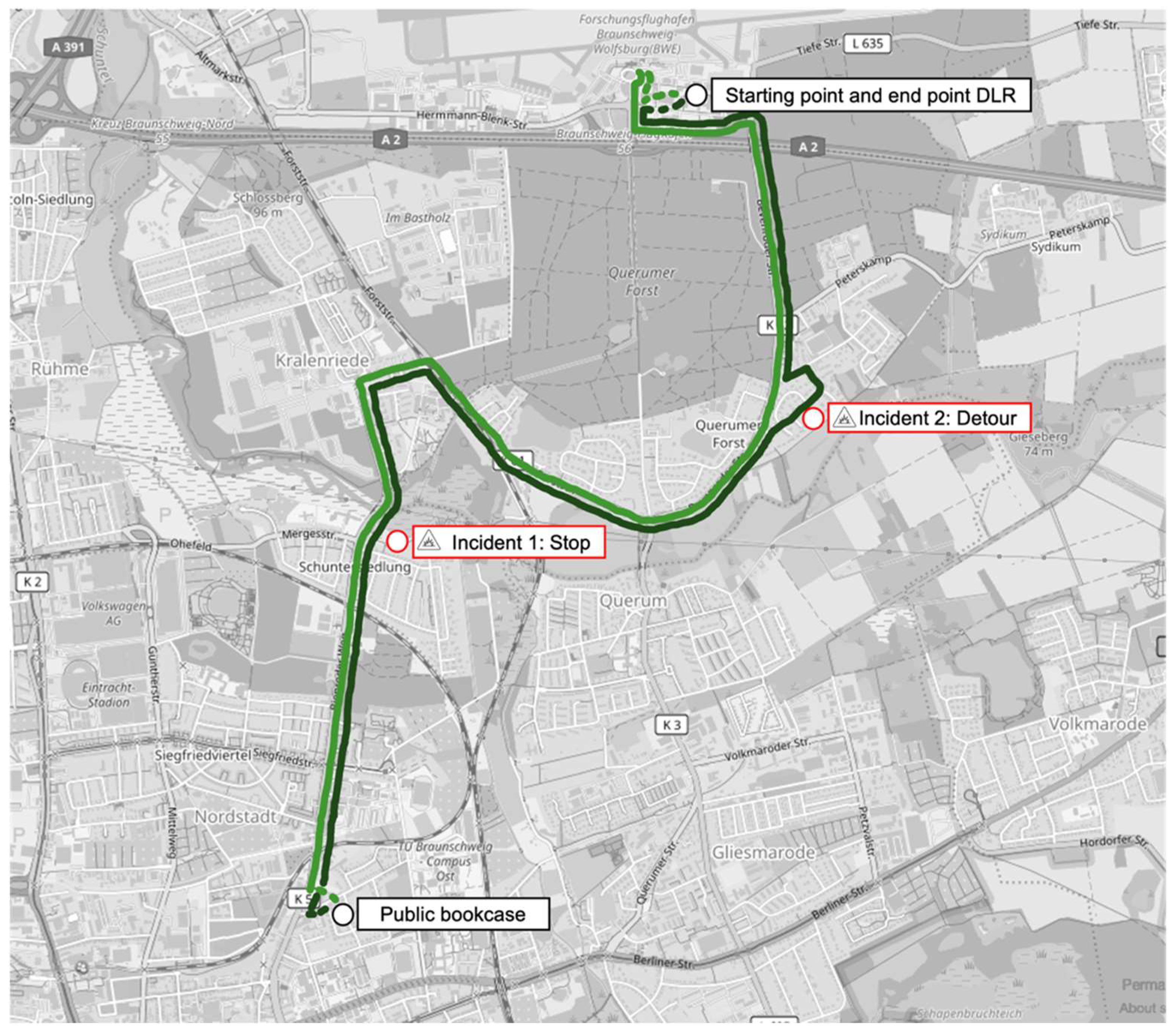
2.4. Setup
2.5. Procedure

2.6. Statistical Analysis
3. Results
3.1. Reliability
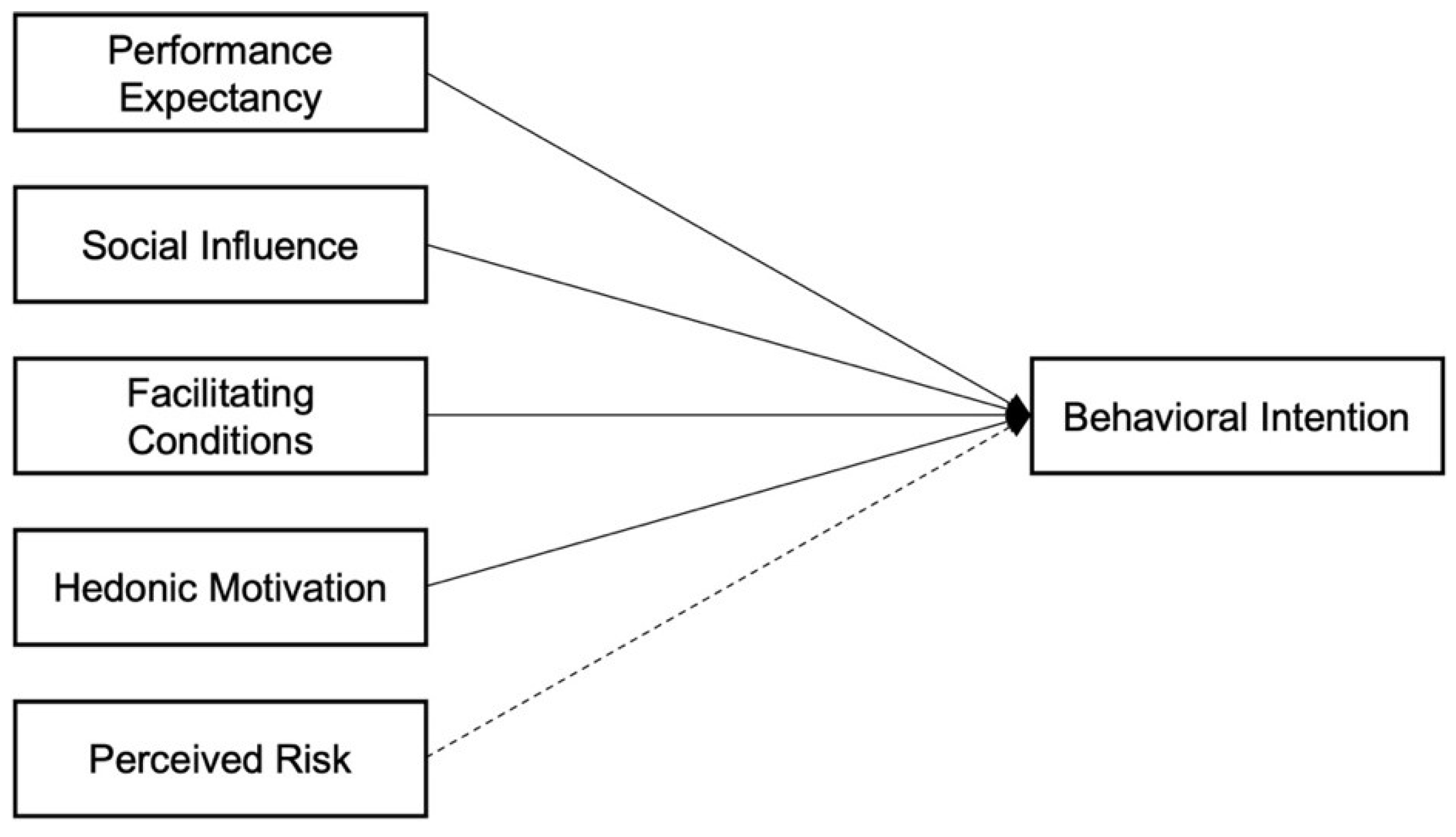
3.2. Results Regarding UTAUT-2 (H1 and H2)
3.3. Change in Behavioral Intention from Pre-Ride to Post-Ride (H3)
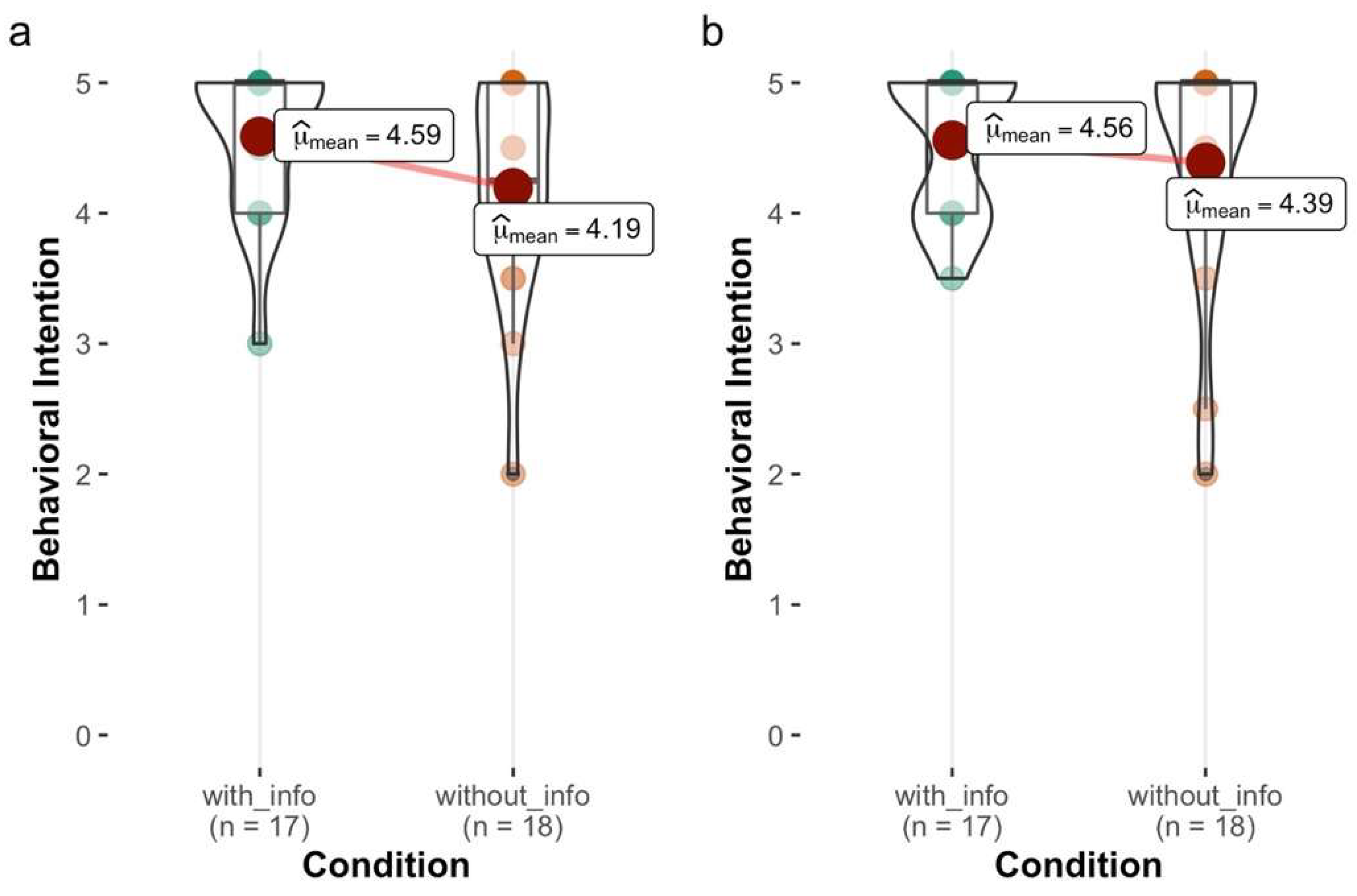
3.4. Influence of Information on Behavioral Intention (H4)
4. Discussion
4.1. Summary of the Results
4.2. Interpretation and Implication of the Results
- At the current state of implementation, performance expectancy is the key predictor of behavioral intention to use automated shuttles;
- The predictive effect of UTAUT-2 might be subject to temporal dynamics depending on the implementation status of automated shuttles;
- The explanatory power of UTAUT-2 doubles from pre-ride to post-ride, implying a better application of the model in real-world driving studies than in questionnaire studies.
4.3. Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pakusch, C.; Bossauer, P. User Acceptance of Fully Autonomous Public Transport. In Proceedings of the 14th International Joint Conference on e-Business and Telecommunications, Madrid, Spain, 24–26 July 2017; SCITEPRESS-Science and Technology Publications: Cham, Switzerland, 2017; pp. 52–60, ISBN 978-989-758-257-8. [Google Scholar]
- Shen, Y.; Zhang, H.; Zhao, J. Integrating shared autonomous vehicle in public transportation system: A supply-side simulation of the first-mile service in Singapore. Transp. Res. Part A Policy Pract. 2018, 113, 125–136. [Google Scholar] [CrossRef]
- Statistisches Bundesamt. Verkehr-Verkehrsunfälle 2021, 7. Available online: https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Verkehrsunfaelle/Publikationen/Downloads-Verkehrsunfaelle/verkehrsunfaelle-jahr-2080700207004.pdf?__blob=publicationFile (accessed on 15 November 2022).
- Rombaut, E.; Feys, M.; Vanobberghen, W.; de Cauwer, C.; Vanhaverbeke, L. Experience and Acceptance of an Autonomous Shuttle in the Brussels Capital Region. In Proceedings of the 2020 Forum on Integrated and Sustainable Transportation Systems (FISTS), Delft, South Holland Province, The Netherlands, 3–5 November 2020; IEEE: Nashville, TN, USA, 2020; pp. 77–82, ISBN 978-1-7281-9503-2. [Google Scholar]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User Acceptance of Information Technology: Toward a Unified View. MIS Q. 2003, 27, 425. [Google Scholar] [CrossRef]
- Dillon, A.; Morris, M.G. User Acceptance of Information Technology: Theories and Models. In Annual Review of Information Science and Technology; Williams, M., Ed.; Information Today: Medford, NJ, USA, 1996; pp. 3–32. [Google Scholar]
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319. [Google Scholar] [CrossRef]
- King, W.R.; He, J. A meta-analysis of the technology acceptance model. Inf. Manag. 2006, 43, 740–755. [Google Scholar] [CrossRef]
- Venkatesh, V.; Thong, J.Y.; Xu, X. Consumer Acceptance and Use of Information Technology: Extending the Unified Theory of Acceptance and Use of Technology. MIS Q. 2012, 36, 157. [Google Scholar] [CrossRef]
- Nordhoff, S.; Louw, T.; Innamaa, S.; Lehtonen, E.; Beuster, A.; Torrao, G.; Bjorvatn, A.; Kessel, T.; Malin, F.; Happee, R.; et al. Using the UTAUT2 model to explain public acceptance of conditionally automated (L3) cars: A questionnaire study among 9118 car drivers from eight European countries. Transp. Res. Part F Traffic Psychol. Behav. 2020, 74, 280–297. [Google Scholar] [CrossRef]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Madigan, R.; Louw, T.; Dziennus, M.; Graindorge, T.; Ortega, E.; Graindorge, M.; Merat, N. Acceptance of Automated Road Transport Systems (ARTS): An Adaptation of the UTAUT Model. Transp. Res. Procedia 2016, 14, 2217–2226. [Google Scholar] [CrossRef]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Nordhoff, S.; Malmsten, V.; van Arem, B.; Liu, P.; Happee, R. A structural equation modeling approach for the acceptance of driverless automated shuttles based on constructs from the Unified Theory of Acceptance and Use of Technology and the Diffusion of Innovation Theory. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 58–73. [Google Scholar] [CrossRef]
- Bernhard, C.; Oberfeld, D.; Hoffmann, C.; Weismüller, D.; Hecht, H. User acceptance of automated public transport. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 109–123. [Google Scholar] [CrossRef]
- Bauer, R.A. Consumer behavior as risk taking. In Proceedings of the 43rd National Conference of the American Marketing Assocation, Chicago, IL, USA, 15–17 June 1960; pp. 389–398. [Google Scholar]
- Jacoby, J.; Kaplan, L.B. The components of perceived risk. In Proceedings of the Third Annual Conference of the Association for Consumer Research, Chicago, IL, USA, 3–5 November 1972; Venkatesan, M., Ed.; pp. 382–393. [Google Scholar]
- Rogers, E.M.; Singhal, A.; Quinlan, M.M. Diffusion of innovations. An Integrated Approach to Communication THEORY and Research; Routledge: London, UK, 2014; pp. 432–448. [Google Scholar]
- Zhang, T.; Zeng, W.; Zhang, Y.; Tao, D.; Li, G.; Qu, X. What drives people to use automated vehicles? A meta-analytic review. Accid. Anal. Prev. 2021, 159, 106270. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Li, R.; Gan, M.; Fu, Z.; Yuan, F. Public Acceptance of Driverless Buses in China: An Empirical Analysis Based on an Extended UTAUT Model. Discret. Dyn. Nat. Soc. 2020, 2020, 4318182. [Google Scholar] [CrossRef]
- Rahman, M.M.; Lesch, M.F.; Horrey, W.J.; Strawderman, L. Assessing the utility of TAM, TPB, and UTAUT for advanced driver assistance systems. Accid. Anal. Prev. 2017, 108, 361–373. [Google Scholar] [CrossRef] [PubMed]
- Pascale, M.T.; Rodwell, D.; Coughlan, P.; Kaye, S.-A.; Demmel, S.; Dehkordi, S.G.; Bond, A.; Lewis, I.; Rakotonirainy, A.; Glaser, S. Passengers’ acceptance and perceptions of risk while riding in an automated vehicle on open, public roads. Transp. Res. Part F Traffic Psychol. Behav. 2021, 83, 274–290. [Google Scholar] [CrossRef]
- Pigeon, C.; Alauzet, A.; Paire-Ficout, L. Factors of acceptability, acceptance and usage for non-rail autonomous public transport vehicles: A systematic literature review. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 251–270. [Google Scholar] [CrossRef]
- Fröhlich, P.; Schatz, R.; Buchta, M.; Schrammel, J.; Suette, S.; Tscheligi, M. “What’s the Robo-Driver up to?” Requirements for Screen-based Awareness and Intent Communication in Autonomous Buses. i-com 2019, 18, 151–165. [Google Scholar] [CrossRef]
- Grippenkoven, J.; Fassina, Z.; König, A.; Dreßler, A. Perceived safety: A necessary precondition for successful autonomous mobility services. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter 2018 Annual Conference, Berlin, Germany, 8–10 October 2018; de Waard, D., Brookhuis, K., Coelho, D., Fairclough, S., Manzey, D., Naumann, A., Onnasch, L., Röttger, S., Toffetti, A., Wiczorek, R., Eds.; pp. 119–133, ISBN 2233-4959. [Google Scholar]
- Zhang, T.; Tan, H.; Li, S.; Zhu, H.; Tao, D. Public’s acceptance of automated vehicles: The role of initial trust and subjective norm. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2019, 63, 919–923. [Google Scholar] [CrossRef]
- Zmud, J.; Sener, I.N.; Wagner, J. Consumer Acceptance and Travel Behavior: Impacts of Automated Vehicles; No. PRC 15-49 F; Texas A&M Transportation Institute: Bryan, TX, USA, 2016. [Google Scholar]
- Brandebusemeyer, C.; Ihme, K.; Bosch, E. Travelers’ Information Need in Automated Vehicles—A Psychophysiological Analysis. In Proceedings of the International Conference On Human-Centered Cognitive Systems (HCCS 2022), Shanghai, China, 17–18 December 2022. accepted. [Google Scholar]
- General Data Protection Regulation. 2016. Available online: https://gdpr-info.eu/ (accessed on 15 November 2022).
- OpenStreetMap Deutschland. Available online: https://www.openstreetmap.org/ (accessed on 15 November 2022).
- Koller, M.; Stahel, W.A. Sharpening Wald-type inference in robust regression for small samples. Comput. Stat. Data Anal. 2011, 55, 2504–2515. [Google Scholar] [CrossRef]
- Yohai, V.J. High Breakdown-Point and High Efficiency Robust Estimates for Regression. Ann. Statist. 1987, 15, 642–656. [Google Scholar] [CrossRef]
- Field, A.P.; Wilcox, R.R. Robust statistical methods: A primer for clinical psychology and experimental psychopathology researchers. Behav. Res. Ther. 2017, 98, 19–38. [Google Scholar] [CrossRef]
- Dwivedi, A.K.; Mallawaarachchi, I.; Alvarado, L.A. Analysis of small sample size studies using nonparametric bootstrap test with pooled resampling method. Stat. Med. 2017, 36, 2187–2205. [Google Scholar] [CrossRef] [PubMed]
- IBM Corp. IBM SPSS Statistics for Macintosh; IBM Corp.: Armonk, NY, USA, 2020. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020; Available online: https://www.r-project.org/ (accessed on 15 November 2022).
- Maechler, M.; Rousseeuw, P.; Croux, C.; Todorov, V.; Ruckstuhl, A.; Salibian-Barrera, M.; Verbeke, T.; Koller, M.; Conceicao, E.; Anna di Palma, M. Robustbase. Robustbase: Basic Robust Statistics. CRAN. 2020. Available online: https://r-forge.r-project.org/projects/robustbase/ (accessed on 15 November 2022).
- Patil, I. Visualizations with statistical details: The ‘ggstatsplot’ approach. JOSS 2021, 6, 3167. [Google Scholar] [CrossRef]
- Kline, P. Handbook of Psychological Testing; Routledge: London, UK, 2013. [Google Scholar]
- Weise, G. Psychologische Leistungstests: Ein Handbuch für Studium und Praxis. 1. Intelligenz, Konzentration, Spezielle Fähigkeiten; Verlag für Psychologie: Hogrefe, Germany, 1975. [Google Scholar]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences; Lawrence Erlbaum Associates: Hillsdale, NJ, USA, 1988. [Google Scholar]
- Földes, D.; Csiszar, C.; Zarkashev, A. User expectations towards mobility services based on autonomous vehicle. In Proceedings of the 8th International Scientific Conference CMDTUR 2018, Žilina, Slovakia, 4–5 October 2018; pp. 7–14. [Google Scholar]
- Dong, X.; DiScenna, M.; Guerra, E. Transit user perceptions of driverless buses. Transportation 2019, 46, 35–50. [Google Scholar] [CrossRef]
- Salonen, A.; Haavisto, N. Towards Autonomous Transportation. Passengers’ Experiences, Perceptions and Feelings in a Driverless Shuttle Bus in Finland. Sustainability 2019, 11, 588. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Construct | Items | Source |
|---|---|---|
| Performance Expectancy (PE) | PE1: Using automated shuttles to travel helps me to achieve things that are important to me. PE2: I find automated shuttles a useful mode of transport. | [13] |
| Social Influence (SI) | SI1: People who influence my behavior think that I should use automated shuttles. SI2: People who are important to me think that I should use automated shuttles. SI3: People whose opinions I value would like me to use automated shuttles. | [13] |
| Facilitating Conditions (FC) | FC1: I have the knowledge necessary to use automated shuttles as in this study. FC2: I have the resources necessary to use automated shuttles as in this study. | [13] |
| Hedonic Motivation (HM) | HM1: Using automated shuttles is fun. HM2: Using automated shuttles is entertaining. HM3: Using automated shuttles is enjoyable. | [13] |
| Behavioral Intention (BI) | BI1: Assuming that I had access to automated shuttles, I predict that I would use them in the future. BI2: If automated shuttles become available permanently, I plan to use them. BI3: I intend to have the automated shuttle take me to my car/bike/stop after the experiment. | [13] |
| Perceived Risk (PR) | PR0: I think the speed of automated shuttles is not fast enough, which will affect my travel time. PR1: I am concerned that automated shuttles will cost more than traditional buses. PR2: I am concerned that the functional design of automated shuttles is still not perfect today. PR3: I am concerned about being persecuted by others in the automated shuttles. PR4: I am concerned that the safety performance of automated shuttles is not guaranteed. PR5: I am concerned that automated shuttles will conflict and interfere with human-driven vehicles. | [20] |
| Scale | T1 | T2 | T3 |
|---|---|---|---|
| Performance Expectancy (PE) | 0.62 | 0.81 | 0.82 |
| Social Influence (SI) | 0.84 | 0.89 | 0.90 |
| Facilitating Conditions (FC) | 0.02 | 0.74 | 0.86 |
| Hedonic Motivation (HM) | 0.77 | 0.82 | 0.84 |
| Behavioral Intention (BI) | 0.87 (0.69) | 0.91 (0.71) | 0.95 (0.68) |
| Perceived Risk (PR) | 0.41 (0.13) | 0.76 (0.41) | 0.84 (0.68) |
| Time | Step | β | β 95% CI | SE | βstd | Fit | |
|---|---|---|---|---|---|---|---|
| T1 | 1 | (Constant) | 1.40 | [−0.29, 3.09] | 0.83 | ||
| Performance Expectancy | 0.46 * | [0.05, 0.86] | 0.20 | 0.39 * | |||
| Social Influence | 0.14 | [−0.13, 0.42] | 0.13 | 0.19 | |||
| Hedonic Motivation | 0.16 | [−0.14, 0.46] | 0.15 | 0.17 | |||
| R2 = 0.347 ** Rob. R2 = 0.332 ** R2adj = 0.284 ** Rob. R2adj = 0.268 ** | |||||||
| T2 | 1 | (Constant) | 0.49 | [−0.85, 1.83] | 0.66 | ||
| Performance Expectancy | 0.79 *** | [0.47, 1.10] | 0.16 | 0.72 *** | |||
| Social Influence | −0.04 | [−0.22, 0.14] | 0.09 | −0.06 | |||
| Facilitating Conditions | 0.00 | [−0.22, 0.21] | 0.11 | −0.00 | |||
| Hedonic Motivation | 0.14 | [−0.13, 0.42] | 0.13 | 0.15 | |||
| R2 = 0.632 *** Rob. R2 = 0.590 *** R2adj = 0.583 *** Rob. R2adj = 0.535 *** | |||||||
| 2 | (Constant) | 0.63 | [−1.10, 2.36] | 0.85 | |||
| Performance Expectancy | 0.77 *** | [0.43, 1.11] | 0.17 | 0.71 *** | |||
| Social Influence | −0.04 | [−0.22, 0.14] | 0.09 | −0.06 | |||
| Facilitating Conditions | 0.00 | [−0.23, 0.22] | 0.11 | −0.00 | |||
| Hedonic Motivation | 0.14 | [−0.14, 0.42] | 0.14 | 0.14 | |||
| Perceived Risk | −0.03 | [−0.22, 0.17] | 0.10 | −0.03 | |||
| ΔR2 = 0.001 R2 = 0.633 *** R2adj = 0.570 *** | |||||||
| T3 | 1 | (Constant) | 0.68 | [−0.78, 2.14] | 0.71 | ||
| Performance Expectancy | 0.77 *** | [0.47, 1.08] | 0.15 | 0.74 *** | |||
| Social Influence | −0.07 | [−0.25, 0.10] | 0.09 | −0.10 | |||
| Facilitating Conditions | −0.06 | [−0.36, 0.25] | 0.15 | −0.04 | |||
| Hedonic Motivation | 0.20 | [−0.07, 0.47] | 0.13 | 0.20 | |||
| R2 = 0.657 *** R2adj = 0.612 *** | |||||||
| 2 | (Constant) | 0.63 | [−1.10, 2.36] | 0.79 | |||
| Performance Expectancy | 0.77 *** | [0.43, 1.11] | 0.15 | 0.71 *** | |||
| Social Influence | −0.04 | [−0.22, 0.14] | 0.09 | −0.06 | |||
| Facilitating Condititons | −0.00 | [−0.23, 0.22] | 0.15 | −0.00 | |||
| Hedonic Motivation | 0.14 | [−0.14, 0.42] | 0.14 | 0.14 | |||
| Perceived Risk | −0.03 | [−0.22, 0.17] | 0.08 | −0.03 | |||
| R2 = 0.672 *** R2adj = 0.615 *** ΔR2 = 0.014 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rybizki, A.; Ihme, K.; Nguyen, H.P.; Onnasch, L.; Bosch, E. Acceptance of Automated Shuttles—Application and Extension of the UTAUT-2 Model to Wizard-of-Oz Automated Driving in Real-Life Traffic. Future Transp. 2022, 2, 1010-1027. https://doi.org/10.3390/futuretransp2040056
Rybizki A, Ihme K, Nguyen HP, Onnasch L, Bosch E. Acceptance of Automated Shuttles—Application and Extension of the UTAUT-2 Model to Wizard-of-Oz Automated Driving in Real-Life Traffic. Future Transportation. 2022; 2(4):1010-1027. https://doi.org/10.3390/futuretransp2040056
Chicago/Turabian StyleRybizki, Anne, Klas Ihme, Hoai Phuong Nguyen, Linda Onnasch, and Esther Bosch. 2022. "Acceptance of Automated Shuttles—Application and Extension of the UTAUT-2 Model to Wizard-of-Oz Automated Driving in Real-Life Traffic" Future Transportation 2, no. 4: 1010-1027. https://doi.org/10.3390/futuretransp2040056
APA StyleRybizki, A., Ihme, K., Nguyen, H. P., Onnasch, L., & Bosch, E. (2022). Acceptance of Automated Shuttles—Application and Extension of the UTAUT-2 Model to Wizard-of-Oz Automated Driving in Real-Life Traffic. Future Transportation, 2(4), 1010-1027. https://doi.org/10.3390/futuretransp2040056