4.1. First Rule: Transition Zones
As presented in the methodology, the analysis of transition zones must consider all the sight distances required from the standards. Italian design standards consider visibility a prior factor in road design and safety. They define five different kinds of sight distance: stopping sight distance (SSD), passing sight distance (PSD), lane-change sight distance (LCSD) and identification sight distance (IDSD) from D.M. 2001 [
21], and the intersection sight distance (ISD) from D.M. 2006 [
23]. Italian standards lack any specific definition of a decision sight distance (DSD).
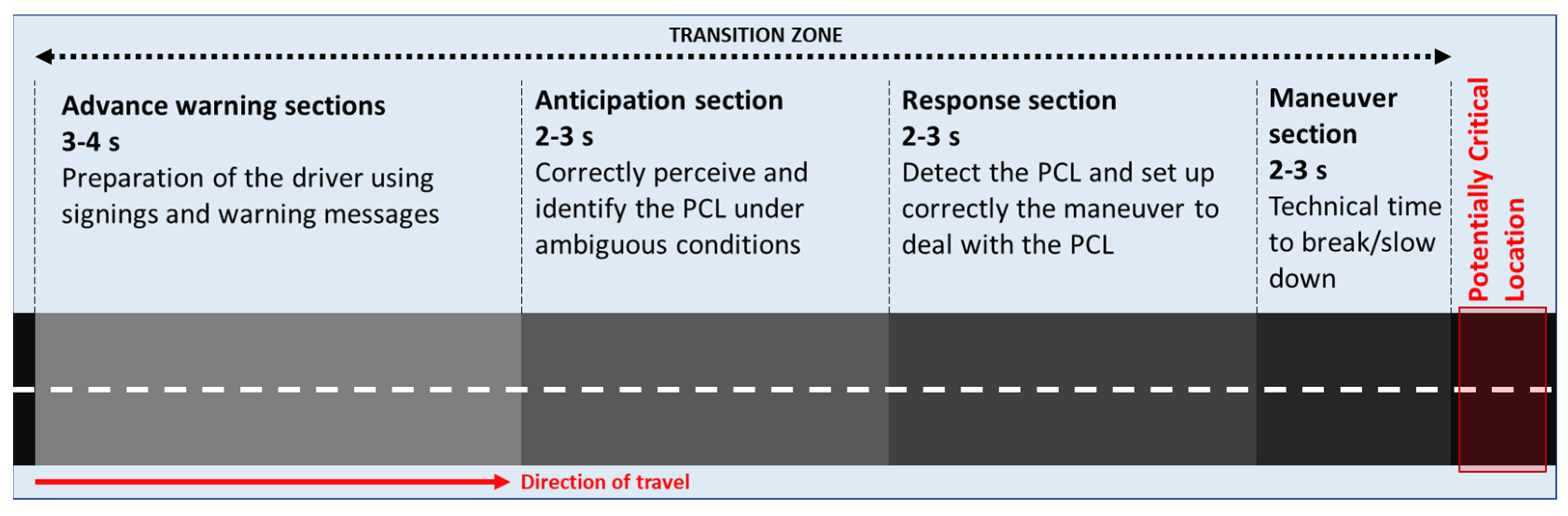
SSD must be verified along all the roads. It is composed of a maneuver section and a response section. The maneuver section is calculated considering many factors, of which the most influential are initial speed, final speed, longitudinal slope, and friction coefficient. The response section time varies from 2.6 s to 1.4 s, following the Equation (1).
where τ = perception and reaction time [s], v = design speed [m/s]
With a variable response section, the standards assume that with higher speed the driver is more focused on the road. Thus, the higher the speed, the lesser the time τ required to react. In the case of a more complex context, the perception and reaction time can be increased by 1 second for rural roads and up to 3 seconds for urban roads. Therefore, the total range of τ should be between 2.4 s and 5.6 s. This fits the PIARC response section requirement and partially fits the anticipation section requirement. The NCHRP Guidelines proposes to consider the τ (PRT: Perception-Reaction Time) as 1.6 s under good condition and 5 or more seconds under poor conditions for rural roads. Therefore, it can be drafted that Italian design standards should probably allow for an increased perception and reaction time also in rural areas if poor visibility conditions are present. This means that the introduction of a decision sight distance could be suggested.
PSD is calculated considering that the driver has already reached the speed necessary to overtake the preceding vehicle. The scheme of the maneuver is the same presented by NCHRP Guidelines [
24] (page 5–10). The total distance required by the Italian design standards is presented in Equation (2).
where PSD = passing sight distance [m], v = design speed [m/s]
The value of 20 seconds is in line with the values proposed by NCHRP Guidelines. PIARC does not provide any specific length reference for PSD.
LCSD is a specific maneuver that must be considered when a lane change is required to move to another road (or ramp). LCSD must be considered in carriageways with at least two lanes (e.g., intersections, deviations, etc.). The total distance required is presented in Equation (3).
where LCSD = lane-change sight distance [m]
The overall time of 9.5 seconds is composed of 5 seconds required to perceive, recognize, and understand the necessary maneuver and 4.5 seconds for the maneuver itself. Thus, it can be considered that both response and anticipation sections are present. This maneuver can be compared to the types C, D, and E Avoidance Maneuvers of NCHRP Guidelines, where the time value is yet higher. In addition, in this case, Italian design standards should probably consider a higher value of perception time, mainly where difficulties in visibility are present.
IDSD is a specific sight distance required for curve visibility. It is defined as the distance to see and perceive a change on the road. IDSD is 12 seconds long. It has been considered that drivers are not able to perceive any changes in the road beyond this distance. Therefore, for Italian design standards, the IDSD must be higher than the “transition distance” (TD). TD is the distance required to change the speed and to adapt it to correctly drive within a curve. It simply derives from the equations of motions. TD can be calculated using Equation (4).
where TD = transition distance [m]; v
1 = design speed of the first element [m/s]; v
2 = design speed of the second element (curve speed) [m/s]; a = deceleration, 0.8 m/s
2.
TD can be considered a maneuver section, but it does not have the deceleration value generally used in the braking section. The deceleration value is 0.8 m/s
2, which represents a gradual change in speed that is mainly the inertial deceleration. This model represents the driver seeing the curve from a long distance and starting to adjust their behavior. Consequently, the sight distance before a bend should be always higher than, or at least equal to the TD. Comparing the TD to the PIARC maneuver section is not easy. Considering some intermediate values, PIARC suggests a maneuver section of 35 m (time of about 2 seconds) to pass from a speed of 80 km/h to a speed of 60 km/h [
25]. At a speed of 80 km/h, drivers will travel about 110 m in 5 seconds, thus the maneuver, response, and anticipation sections together are about 145 m. The calculated TD for the same speed variation is 135 m. Thus, because IDSD must be higher than TD, all three sections could be considered satisfied.
ISD is a distance specific for an intersection that is based on visibility triangles, where the greater cathetus must be equal to the distance D, calculated as illustrated in Equation (5). The other cathetus must be considered as 20 m for yield-controlled intersections and as 3 m for stop-controlled intersections, starting measuring from the margin of the main road.
where D = required distance [m]; t = 6 s for stop-controlled intersection and 12 s yield-controlled intersection.
The Italian legislation requires that those distances must be increased by 1 second for each slope grade over 2%. It should also be emphasized that ISD considers the point of view of the vehicle entering from the secondary road, nothing is said about the visibility from the main road.
Concerning the “advance warning section”, the Italian legislation offers a wide regulation about the implementation of road signs [
22], with partial explanation attributable to HF principles.
Table 5 shows the results of the evaluations made for all the subsections of the investigation topic “transition zones”.
Italian design standards consider sight-related aspects. Nevertheless, more stress must be put on the perception time, not only as an emergency action but also considering non-emergency conditions, and the concept of decision sight distance should be introduced.
4.2. First Rule: Perception and Visibility
Perception and visibility must consider the sight distances, the design of roadside elements that can affect the visibility of a PCL, and the use of traffic control devices, including signs and markings (see
Section 3.3).
Concerning the curve perception, the necessity of an SSD along the overall road assures minimum visibility of the inner margin also in sharp curves. Furthermore, when a curve is hard to be correctly perceived or does not comply with driver expectations, the standards allow for improving the visibility of the outer margins with a series of single chevrons signs. Moreover, horizontal, and vertical alignment coordination is required to avoid curves’ optical illusion. No specific recommendations are provided about the environment configuration, specifically of the outer curve.
The Italian design standards provide detailed instructions about the construction of visibility triangles, also specifying which kind of objects can stay within the triangle. The visibility triangle must always be present. Intersections should be placed in tangents and the distance between them must avoid any overlapping of information (e.g., indication signs). To locate an intersection, it must be also considered the environmental characteristics, for example, the presence of tunnels.
The unmistakable right of way is entrusted by the road type and the vertical signs and markings, which must be used and must be visible. The standards require that at the intersections, all maneuvers must be clear, and each lane of the intersection must have a clear function. Road signs and marking are largely used to improve the visibility, perception, and comprehension PCLs. However, additional emphasis should be used to underline the importance of intersection geometry to correctly attribute the correct right of way.
Table 6 shows the results of the evaluations made for all the subsections of the investigation topic “perception and visibility”.
To improve the visibility and perception of PCLs, Italian design standards rely much on the use of signs and markings. Such traffic control devices can be extremely useful under specific circumstances [
33], but they cannot represent the main information source. They should be complementary to the information provided by the road layout. Both the importance of such devices and the drivers’ poor attention to road signs and markings have been demonstrated [
34,
35].
4.3. Second Rule: Density of the Field of View
To evaluate if the standards include requirements about the density of the field of view, for each subsection, the following RDRs should be considered (see
Section 3.3): road surrounding and road environment design, use and consistency of geometrical elements, roadside elements design, and use of traffic control devices.
Italian design standards do not provide any instruction about the organization of the surrounding of the road and no comments are made about the possible monotony of the elements around the road. However, they consider the monotony derived from the geometrical alignment and prevent it by introducing a maximum length of the tangents, based on the design speed. The requirement is described in (4).
where L
r = maximum tangent length [m]; V
pmax = maximum design speed for that road type [km/h]
Table 7 shows the results of the evaluations made for all the subsections of the investigation topic “density of the field of view”.
Italian design standards do not include any specific reference to the roadside configuration and its influence on driving behavior. As demonstrated, elements along roadsides have a high influence on speed and lane-keeping, both because of improved risk perception [
36] and because of the enhanced perception of speed [
37]. Thus, design standards should provide recommendations about the roadsides’ arrangement.
4.4. Second Rule: Lateral Space Configuration
To analyze the correct configuration of the lateral space, the following RDRs should be considered (see
Section 3.3): road surrounding and road environment design, roadside elements design, and use of traffic control devices.
As already stated, Italian design standards do not account for the road environment over the roadsides. The design of roadside elements, such as safety barriers, does not consider their influence on the driver’s perception. Specifically, the orientation of the perceptual lines of the road environment is not considered. Elements along the roadside are instead useful for lane-keeping and driving stabilization and can also influence the visual perspective of the approaching road stretch [
25]. Moreover, Italian design standards don’t provide any recommendation about the design of the structures passing over the road (except their minimum height above the road). The carriageway width reductions (lane width reduction or removed lane) are managed by road signs and markings and must be gradually implemented (longitudinal carriageway markings must be slanting by 2% on motorways and rural highways, and by 5% on urban and local roads). Optical framing of curves is only partially addressed by the standards, which underline the need for chevrons and curve delineators if the curve is hard to be perceived or not expected. If the chevrons are not visible against the background, a high-contrasting frame can be used. When road speed and visibility conditions require additional cues to increase the visibility of the road course, Italian design standards allow for the use of roadside delineators along the whole road. The distance between each delineator in a curve varies based on the radius of the curve: low radii require a denser delineation: this will help the optical framing of the curve and the curve perception. Standards also suggest using a series of chevrons when the curve is not easily perceived. The importance of an adequate curve framing is also addressed by NHCRP Guidelines. They stated that the composition of the field of view strongly influences the curvature perception and the speed choice. They identify two different sections of the road concerning the curve traveling: an open-loop anticipatory component (far view) for predicting curvature and steering angle, and a closed-loop compensatory component (near view) for correcting deviations from the desired path [
38]. They also underline the importance of geometric alignment and delineation features for a correct perception of the curve.
Table 8 shows the results of the evaluations made for all the subsections of the investigation topic “lateral space structure”.
In addition, the analysis of the lateral space structure confirms that Italian design standards lack any instruction on roadsides configuration. The presence and absence of roadside elements such as safety barriers can influence the choice of speed and lane-keeping [
14].
4.5. Second Rule: Depth of the Field of View
Road environment design and the consistency of geometrical elements are the main RDRs that should be analyzed to evaluate the depth of the field of view. However, also the design of the areas where the road function changes should be considered (see
Section 3.3).
No requirements or advice concerning the first subsection are present in the standards, underlining once more that the space beyond the roadsides is not considered. Instead, requirements are present regarding optical illusion. Optical illusions let the driver think that the road configuration is different from reality. These mainly address the horizontal and vertical alignment. The spiral transitions scale parameter (A) must range between R/3 and R, where R is the radius of the curve. The first condition allows the spiral transition has a deflection angle of at least 3°, which is the limit to correctly perceiving the presence of the spiral transition. The second condition allows having a correct perception of the curve. To avoid curvature misperception, it is necessary to avoid consecutive spiral transitions unless they link two curves in different directions. In addition, curves must be designed so that their development is equal to the distance traveled in at least 2.5 seconds. This minimum length allows one to clearly perceive the curve and reduces the possibility of “curve cutting” [
39]. Moreover, tangents must have a minimum length to be correctly perceived. The minimum length is based on the maximum speed reached in the tangent, as shown in
Table 9.
Finally, requirements for horizontal and vertical alignment coordination are present. These requirements consider mainly the position between curves and vertical transition. The horizontal and vertical alignment coordination is addressed also by the NCHRP Guidelines [
24] (page 6-4).
No considerations in the Italian standards about optical illusion derived from the environment outside the roadsides are provided. Some requirements are also provided about road course detection. These requirements are mainly geometrical. First, as described in
Section 4.1, an IDSD is required approaching each curve and this allows the visibility of the road track along that stretch. Furthermore, as observed in
Section 4.3, a maximum length of tangent segments based on design speed is required, and this increases the possibility to see a curve at the end of a tangent, limiting the speeding. Roadsides can be underlined using roadside delineators when road speed and visibility conditions require additional cues to increase the visibility of the road course. As for the previous aspects, no requirements concerning the space behind the roadsides are provided.
Table 10 shows the results of the evaluations made for all the subsections of the investigation topic “depth of the field of view”.
Italian design standards do not account for specific elements that can keep the attention of the driver or even distract him, except for the regulation on the use of advertising signs.
4.6. Third Rule: Change in Road Function
To investigate if the standards comply with those HF aspects, the design of the areas where the road function changes must be considered. Moreover, also the composition of the road surrounding and road environment design, and the use of traffic control devices, should be considered (see
Section 3.3).
Italian design standards do not consider the necessity of optical change in the road environment and configuration to underline the change in the road function. The entrances and exits of towns and villages are identified by a specific vertical sign, but no other cues, eye-catching objects, or road configuration modifications are addressed. The town entrance sign must be placed where the urban area begins by administrative boundaries. However, they do not always coincide with the limits of the town. Thus, they can be placed where the urban environment is not yet clearly perceivable. In this case, the change of the road function is not clear, and the driver may not correctly modify their driving behavior. It is stated that the signs must be visible, but no specific distances are given.
Table 11 shows the results of the evaluations made for all the subsections of the investigation topic “change in road function”.
Italian design standards lack guidance about transition zones between rural and urban areas, and no instructions about perceptual treatments are provided. The effectiveness of transition zones with adequate visual cues or cross-section modification has been widely proven in NCHRP Report 737 [
40].
4.9. Third Rule: Overload of Information Processing
To evaluate the overload of information processing, the use of traffic control devices must be first analyzed. Secondary RDRs are also the line of sight, the identification and perception of road elements, and road surrounding and road environment design (see
Section 3.3).
Avoidance of close multiple PCLs is only partially considered by Italian design standards, which provide instructions only for intersections and driveways. Intersections should be placed at a distance that avoids any conflict between the perception of the two intersections, also considering the vertical signs. The suggested distance in a rural environment is at least 500 m. Furthermore, single private accesses are admitted only on local rural roads or local and collector urban roads, while in rural and urban arterial, accesses are admitted only if coordinated in major driveways. A minimum distance is also set between each driveway (access) and between driveways and intersections. In all the above cases, the SSD and the ISD must be guaranteed. Other PCLs (such as bust stops, pedestrian crossings, and changes in the road function) are not considered.
Considering information about PCLs, Italian design standards rely mostly on vertical signs, requiring that information on PCLs is provided before the PCL. It is also required to limit the number of information provided to the driver at the same time, to reduce the workload required to elaborate on all the information.
Table 14 shows the results of the evaluations made for all the subsections of the investigation topic “overload of information processing”.









{kind=link}
{kind=link}
{kind=link}