
A Hybrid LSTM-CPS Approach for Long-Term Prediction of Train Delays in Multivariate Time Series

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Methodology
2.1. Train Delay Problem
2.2. Critical Point Search Classification
| Algorithm 1. CPS Algorithm |
| Input: Given a trip R with a set of arrival delay , |
| and pre-defined thresholds |
| Output: |
| m = 0 |
| For each arrival delay |
| if : |
| else: |
| if : |
| else: |
| End for |
2.3. Supervised Learning Setting
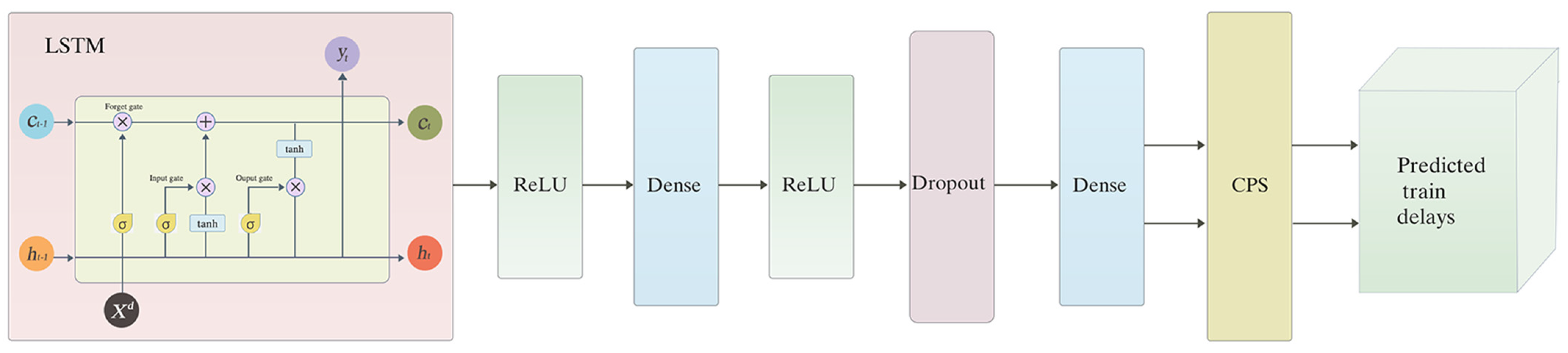
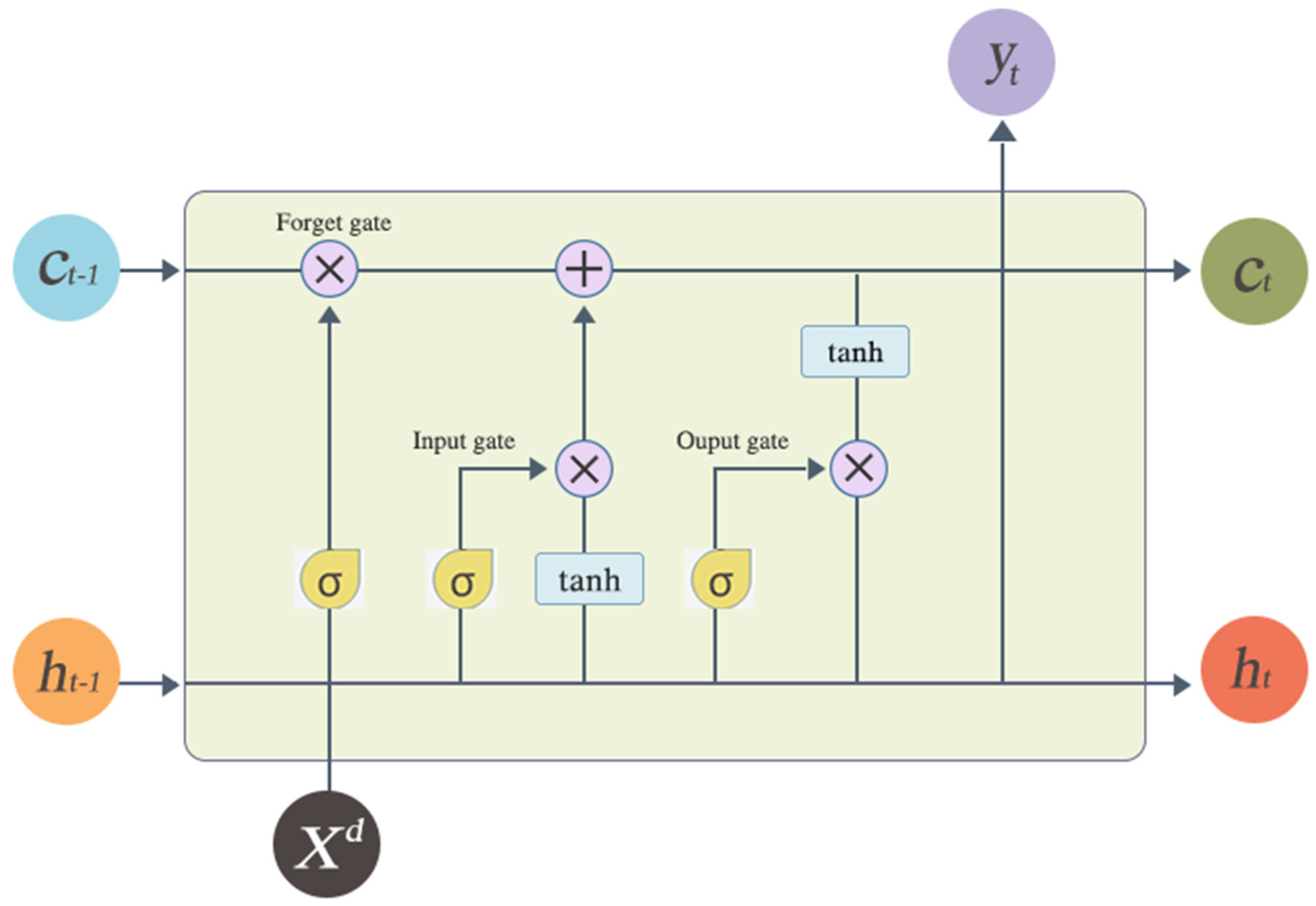
2.4. Multivariate Time Series Forecasting Model
- The CPS algorithm can obtain primary delay and secondary delays on each trip, which presents essential time–space relationships in the status of the railway network.
- A multivariate LSTM model is developed to estimate regression coefficients for multiple stations.
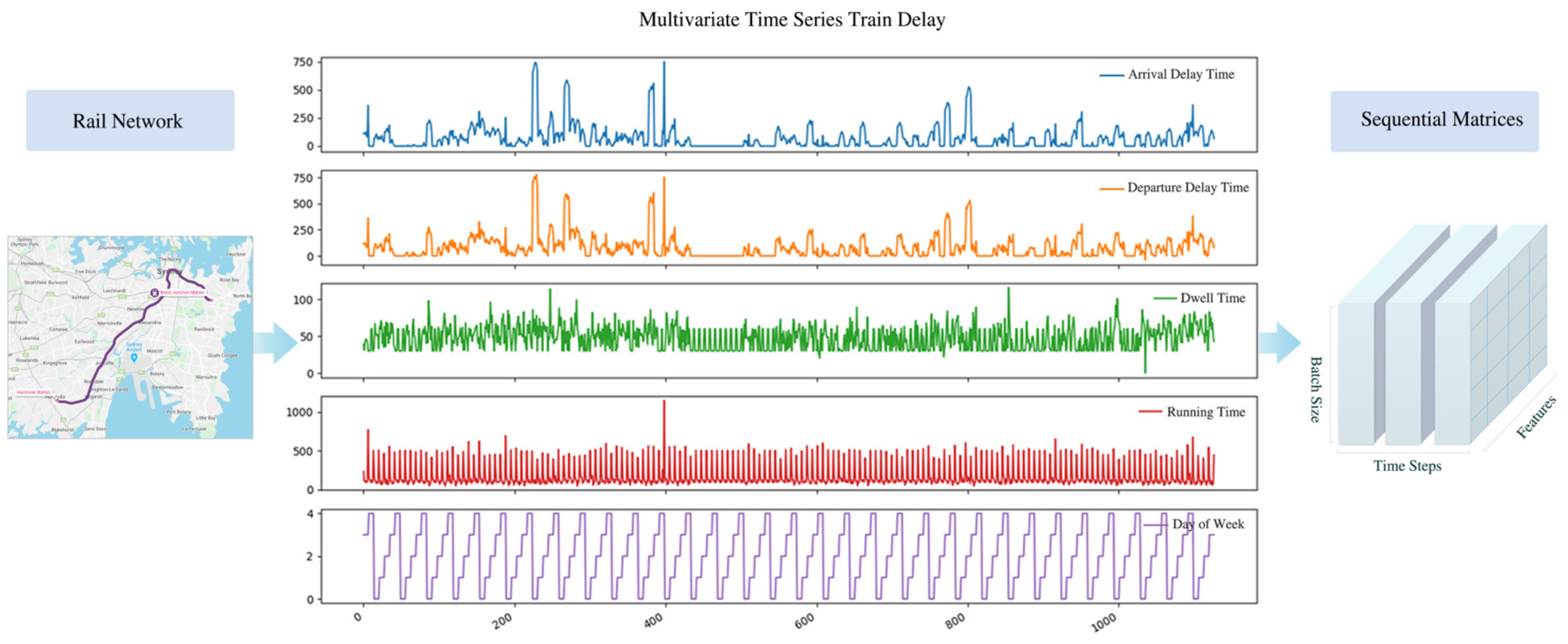
- The hybrid LSTM-CPS is a batch-based prediction architecture to process structured time series. It is not only able to have multi-inputs and multi-outputs (MIMO) features but is also able to be extended to tackle spatio-temporal sequence learning tasks. Notably, this architecture allows deep learning models to reach higher efficiency and accuracy for large-scale railway networks.
3. Experiments
3.1. Data Description
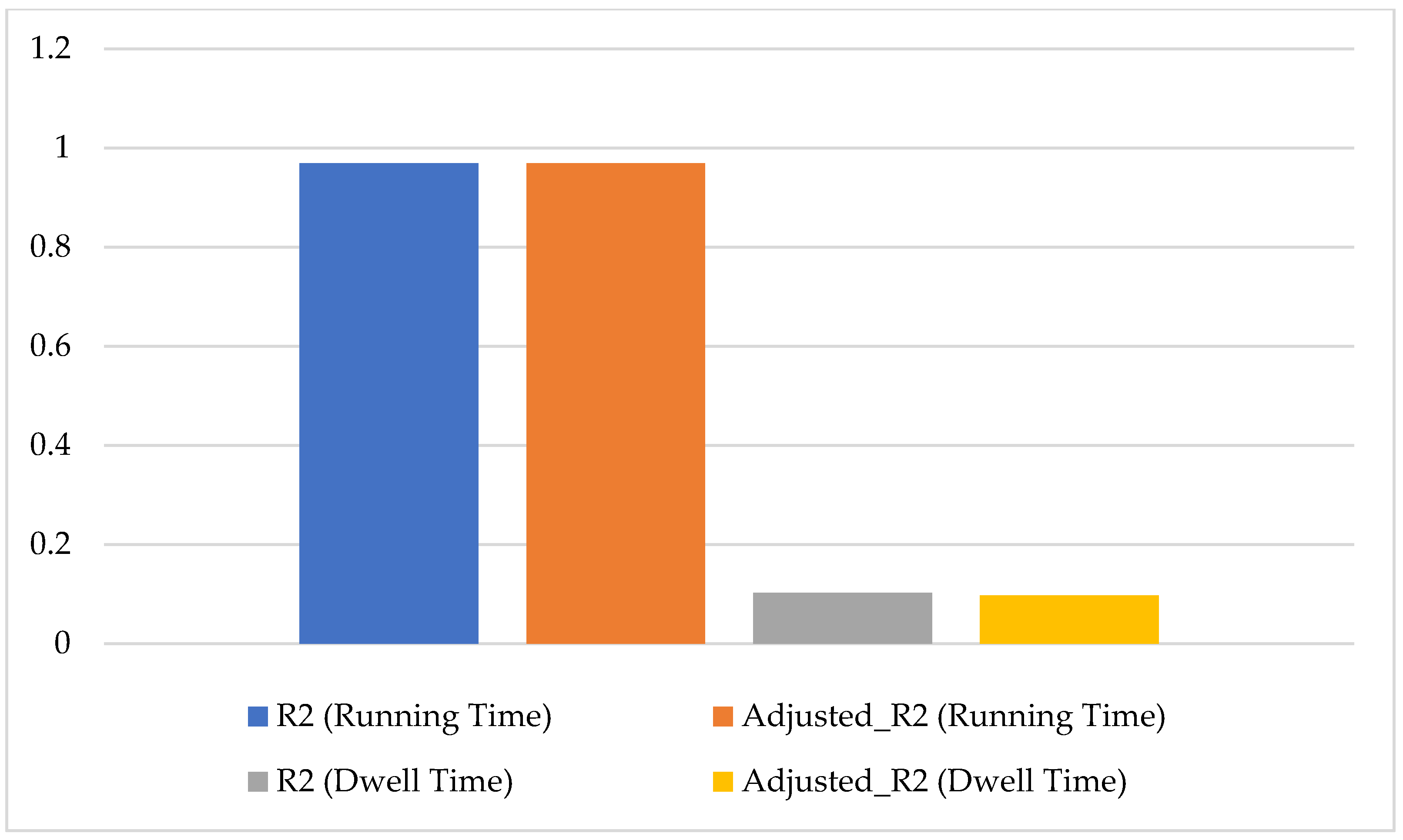
3.2. Evaluation Metrics
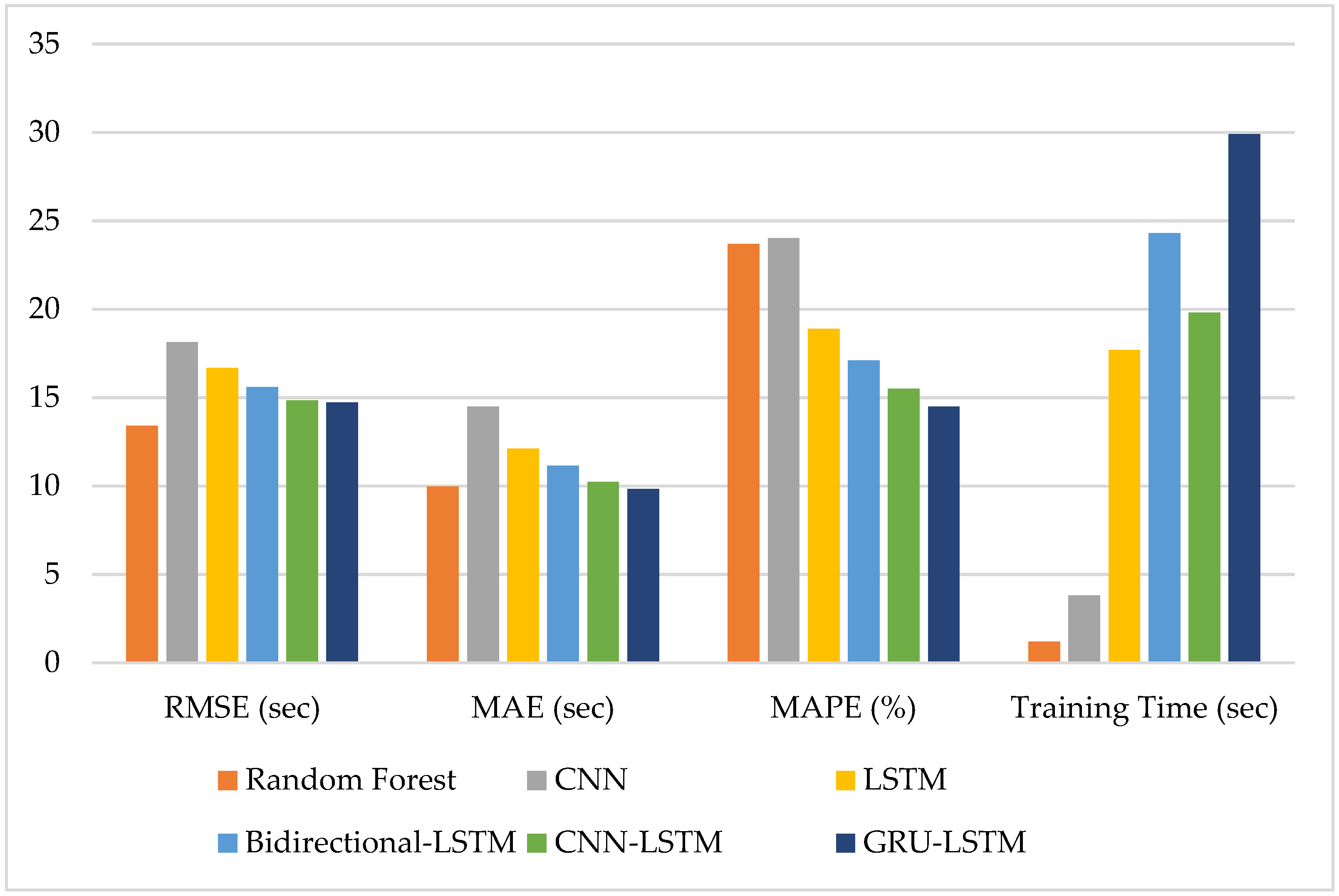
3.3. Model Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Konstantakopoulos, G.D.; Gayialis, S.P.; Kechagias, E.P.; Papadopoulos, G.A.; Tatsiopoulos, I.P. A Multiobjective Large Neighborhood Search Metaheuristic for the Vehicle Routing Problem with Time Windows. Algorithms 2020, 13, 243. [Google Scholar] [CrossRef]
- Kechagias, E.P.; Gayialis, S.P.; Konstantakopoulos, G.D.; Papadopoulos, G.A. Traffic flow forecasting for city logistics: A literature review and evaluation. Int. J. Decis. Support Syst. 2019, 4, 159–176. [Google Scholar] [CrossRef]
- Bernardo, M.; Du, B.; Pannek, J. A simulation-based solution approach for the robust capacitated vehicle routing problem with uncertain demands. Transp. Lett. 2021, 13, 664–673. [Google Scholar] [CrossRef]
- Kechagias, E.P.; Gayialis, S.P.; Konstantakopoulos, G.D.; Papadopoulos, G.A. An Application of an Urban Freight Transportation System for Reduced Environmental Emissions. Systems 2020, 8, 49. [Google Scholar] [CrossRef]
- Vieira, B.O.; Guarnieri, P.; Nofal, R.; Nofal, B. Multi-Criteria Methods Applied in the Studies of Barriers Identified in the Implementation of Reverse Logistics of E-Waste: A Research Agenda. Logistics 2020, 4, 11. [Google Scholar] [CrossRef]
- Mohtashami, Z.; Aghsami, A.; Jolai, F. A green closed loop supply chain design using queuing system for reducing environmental impact and energy consumption. J. Clean. Prod. 2020, 242, 118452. [Google Scholar] [CrossRef]
- Sheng, M.S.; Sreenivasan, A.V.; Sharp, B.; Du, B. Well-to-wheel analysis of greenhouse gas emissions and energy consumption for electric vehicles: A comparative study in Oceania. Energy Policy 2021, 158, 112552. [Google Scholar] [CrossRef]
- Caprara, A.; Fischetti, M.; Toth, P. Modeling and solving the train timetabling problem. Oper. Res. 2002, 50, 851–861. [Google Scholar] [CrossRef]
- Kang, L.; Wu, J.; Sun, H.; Zhu, X.; Wang, B. A practical model for last train rescheduling with train delay in urban railway transit networks. Omega 2015, 50, 29–42. [Google Scholar] [CrossRef]
- Frede, L.; Müller-Hannemann, M.; Schnee, M. Efficient on-Trip Timetable Information in the Presence of Delays. In Proceedings of the 8th Workshop on Algorithmic Approaches for Transportation Modeling, Optimization, and Systems (ATMOS’08), 2008. Available online: https://drops.dagstuhl.de/opus/volltexte/2008/1584/pdf/08002.Frede.1584.pdf (accessed on 12 November 2021).
- Berger, A.; Gebhardt, A.; Müller-Hannemann, M.; Ostrowski, M. Stochastic Delay Prediction in Large Train Networks. In Proceedings of the 11th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems, 2011. Available online: https://drops.dagstuhl.de/opus/volltexte/2011/3270/pdf/10.pdf (accessed on 12 November 2021).
- Zhang, Y.; Li, R.; Guo, T.; Li, Z.; Wang, Y.; Chen, F. A conditional Bayesian delay propagation model for large-scale railway traffic networks. In Proceedings of the Australasian Transport Research Forum, ATRF 2019-Proceedings, Canberra, Australia, 30 September–2 October 2019. [Google Scholar]
- Shi, R.; Xu, X.; Li, J.; Li, Y. Prediction and analysis of train arrival delay based on XGBoost and Bayesian optimization. Appl. Soft Comput. 2021, 109, 107538. [Google Scholar] [CrossRef]
- Gorman, M.F. Statistical estimation of railroad congestion delay. Transp. Res. Part E Logist. Transp. Rev. 2009, 45, 446–456. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.; Du, B.; Wu, Q.; Zhai, Y.; Shen, J.; Zhou, L.; Cai, C.; Wei, W.; Zhou, Q. The Bounds of Improvements toward Real-Time Forecast of Multi-Scenario Train Delays. IEEE Trans. Intell. Transp. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Yamamura, A.; Koresawa, M.; Adachi, S.; Tomii, N. Identification of Causes of Delays in Urban Railways. Comput. Railw. 2013, 13, 403–414. [Google Scholar]
- Milinković, S.; Marković, M.; Vesković, S.; Ivić, M.; Pavlović, N. A fuzzy Petri net model to estimate train delays. Simul. Model. Pract. Theory 2013, 33, 144–157. [Google Scholar] [CrossRef]
- Yaghini, M.; Khoshraftar, M.M.; Seyedabadi, M. Railway Passenger Train Delay Prediction via Neural Network Model. J. Adv. Transp. 2013, 47, 355–368. [Google Scholar] [CrossRef]
- Marković, N.; Milinković, S.; Tikhonov, K.S.; Schonfeld, P. Analyzing passenger train arrival delays with support vector regression. Transp. Res. Part C Emerg. Technol. 2015, 56, 251–262. [Google Scholar] [CrossRef]
- Kecman, P.; Goverde, R.M. Online data-driven adaptive prediction of train event times. IEEE Trans. Intell. Transp. Syst. 2014, 16, 465–474. [Google Scholar] [CrossRef]
- Kecman, P.; Goverde, R.M. Predictive Modelling of Running and Dwell Times in Railway Traffic. Public Transp. 2015, 7, 295–319. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.-H.; Yen, L.-H.; Chou, C.-M. A delay root cause discovery and timetable adjustment model for enhancing the punctuality of railway services. Transp. Res. Part C Emerg. Technol. 2016, 73, 49–64. [Google Scholar] [CrossRef]
- Oneto, L.; Fumeo, E.; Clerico, G.; Canepa, R.; Papa, F.; Dambra, C.; Mazzino, N.; Anguita, D. Dynamic Delay Predictions for Large-Scale Railway Networks: Deep and Shallow Extreme Learning Machines Tuned via Thresholdout. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2754–2767. [Google Scholar] [CrossRef]
- Corman, F.; Kecman, P. Stochastic Prediction of Train Delays in Real-Time using Bayesian Networks. Transp. Res. Part C Emerg. Technol. 2018, 95, 599–615. [Google Scholar] [CrossRef] [Green Version]
- Lessan, J.; Fu, L.; Wen, C. A hybrid Bayesian network model for predicting delays in train operations. Comput. Ind. Eng. 2019, 127, 1214–1222. [Google Scholar] [CrossRef]
- Nair, R.; Hoang, T.L.; Laumanns, M.; Chen, B.; Cogill, R.; Szabó, J.; Walter, T. An Ensemble Prediction Model for Train Delays. Transp. Res. Part C Emerg. Technol. 2019, 104, 196–209. [Google Scholar] [CrossRef]
- Nabian, M.A.; Alemazkoor, N.; Meidani, H. Predicting Near-Term Train Schedule Performance and Delay using Bi-Level Random Forests. Transp. Res. Rec. 2019, 2673, 564–573. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, L.; Cai, C.; Dong, F.; Shen, J.; Sun, G. Towards a General Prediction System for the Primary Delay in Urban Railways. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3482–3487. [Google Scholar]
- LeCun, Y.; Bengio, Y. Convolutional Networks for Images, Speech, and Time Series. Handb. Brain Theory Neural Netw. 1995, 3361, 255–258. [Google Scholar]
- Cho, K.; van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder–Decoder for Statistical Machine Translation. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP), Doha, Qatar, 25–29 October 2014. [Google Scholar]
- Lin, T.; Guo, T.; Aberer, K. Hybrid Neural Networks for Learning the Trend in Time Series. In Proceedings of the Twenty-Sixth International Joint Conference on Artificial Intelligence, Melbourne, Australia, 19–25 August 2017; pp. 2273–2279. [Google Scholar] [CrossRef] [Green Version]
- Du, S.; Li, T.; Yang, Y.; Horng, S. Deep Air Quality Forecasting Using Hybrid Deep Learning Framework. IEEE Trans. Knowl. Data Eng. 2019, 33, 2412–2424. [Google Scholar] [CrossRef] [Green Version]
- Oneto, L.; Buselli, I.; Lulli, A.; Canepa, R.; Petralli, S.; Anguita, D. A dynamic, interpretable, and robust hybrid data analytics system for train movements in large-scale railway networks. Int. J. Data Sci. Anal. 2020, 9, 95–111. [Google Scholar] [CrossRef]
- Zhang, D.; Peng, Y.; Zhang, Y.; Wu, D.; Wang, H.; Zhang, H. Train Time Delay Prediction for High-Speed Train Dispatching Based on Spatio-Temporal Graph Convolutional Network. IEEE Trans. Intell. Transp. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Gong, Z.; Du, B.; Liu, Z.; Zeng, W.; Perez, P.; Wu, K. SD-seq2seq: A Deep Learning Model for Bus Bunching Prediction Based on Smart Card Data. In Proceedings of the 2020 29th International Conference on Computer Communications and Networks (ICCCN), Honolulu, HI, USA, 3–6 August 2020; pp. 1–9. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Graves, A. Generating Sequences with Recurrent Neural Networks. arXiv 2013, arXiv:1308.0850. [Google Scholar]
- Google. Google Transit APIs. Available online: https://developers.google.com/transit/ (accessed on 14 March 2021).
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. TensorFlow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Conference on Operating Systems Design and Implementation, Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference on Learning Representations (ICLR), San Diego, CA, USA, 7–9 May 2015. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | RMSE (sec) | MAE (sec) | MAPE (%) | Training Time (sec) |
|---|---|---|---|---|
| Random Forest | 148.431 | 107.15 | 62.825 | 1.2 |
| CNN | 20.0 | 15.411 | 14.583 | 8.3 |
| LSTM | 20.419 | 14.973 | 11.779 | 56.6 |
| Bidirectional-LSTM | 25.256 | 19.136 | 14.907 | 63.7 |
| CNN-LSTM | 24.218 | 17.076 | 15.066 | 47.1 |
| GRU-LSTM | 21.527 | 18.086 | 15.960 | 85.2 |
| Model | RMSE (sec) | MAE (sec) | MAPE (%) | Training Time (sec) |
|---|---|---|---|---|
| Random Forest | 13.418 | 9.980 | 23.688 | 1.2 |
| CNN | 18.128 | 14.491 | 24.014 | 3.8 |
| LSTM | 16.670 | 12.125 | 18.897 | 17.7 |
| Bidirectional-LSTM | 15.586 | 11.147 | 17.107 | 24.3 |
| CNN-LSTM | 14.837 | 10.229 | 15.498 | 19.8 |
| GRU-LSTM | 14.717 | 9.844 | 14.480 | 29.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Du, B.; Wu, Q.; Shen, J.; Zhou, L.; Cai, C.; Zhai, Y.; Wei, W.; Zhou, Q. A Hybrid LSTM-CPS Approach for Long-Term Prediction of Train Delays in Multivariate Time Series. Future Transp. 2021, 1, 765-776. https://doi.org/10.3390/futuretransp1030042
Wu J, Du B, Wu Q, Shen J, Zhou L, Cai C, Zhai Y, Wei W, Zhou Q. A Hybrid LSTM-CPS Approach for Long-Term Prediction of Train Delays in Multivariate Time Series. Future Transportation. 2021; 1(3):765-776. https://doi.org/10.3390/futuretransp1030042
Chicago/Turabian StyleWu, Jianqing, Bo Du, Qiang Wu, Jun Shen, Luping Zhou, Chen Cai, Yanlong Zhai, Wei Wei, and Qingguo Zhou. 2021. "A Hybrid LSTM-CPS Approach for Long-Term Prediction of Train Delays in Multivariate Time Series" Future Transportation 1, no. 3: 765-776. https://doi.org/10.3390/futuretransp1030042
APA StyleWu, J., Du, B., Wu, Q., Shen, J., Zhou, L., Cai, C., Zhai, Y., Wei, W., & Zhou, Q. (2021). A Hybrid LSTM-CPS Approach for Long-Term Prediction of Train Delays in Multivariate Time Series. Future Transportation, 1(3), 765-776. https://doi.org/10.3390/futuretransp1030042