
Factors Influencing and Contributing to Perceived Safety of Passengers during Driverless Shuttle Rides

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Perceived Safety in AVs
1.2. Study Design
- A Level 4 and especially Level 5 AV would not need a human driver or steward, and a passenger could potentially be alone in an autonomous shuttle, which can influence perceived safety [31]. Passengers would need to trust the technology of the automated system and would have no way to speak to a human driver or steward directly.
- Building on findings from public transport, being alone with unknown people is one of the greatest sources of anxiety [45]. People are especially concerned about safety inside an autonomous shuttle [32], as they worried of being harassed or threatened when there is no driver or steward to potentially intervene [46]. This characteristic of the lack of a human driver or steward is a potential challenge for perceived safety, therefore, we designed a test ride with a person who behaves obnoxious and is not pleasant to share a ride with.
- If automated systems are not working properly, people are hesitant to use them [20]. In case of situations of technical problems in an autonomous shuttle, passengers would need to trust technology for a safe continuation of the journey or a resolution of the problem. Technical limitations and difficulties are challenging for perceived safety, especially with AVs as a new technology, as people are skeptical about the reliability and technical aspects of AVs already [16]. With the autonomous shuttle we used, we identified two situations where technical difficulties might be happening in future use.
2. Materials and Methods
2.1. Shuttle and Test Area
2.2. Recruitment and Instruction of Passengers
2.3. Description of Test Rides
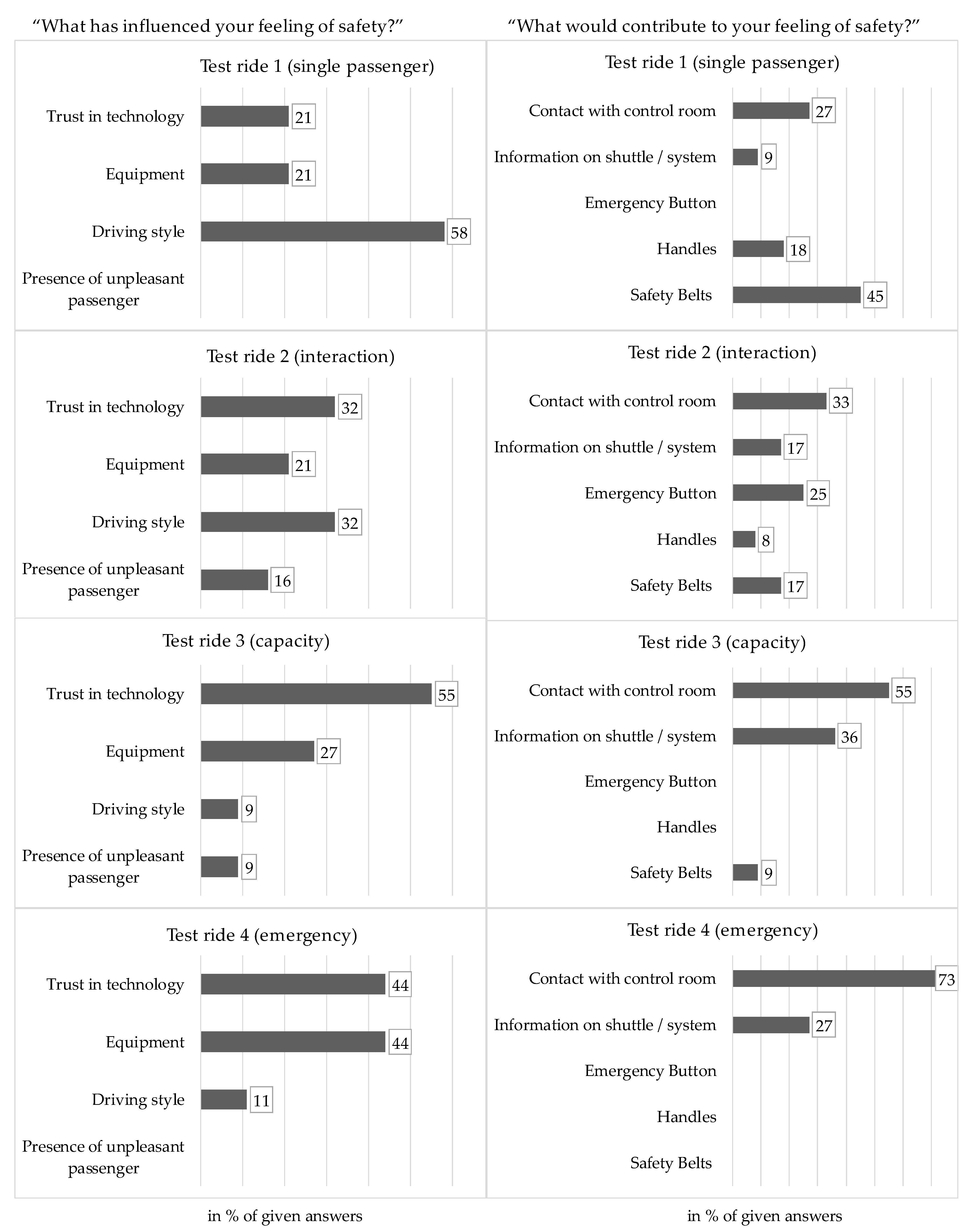
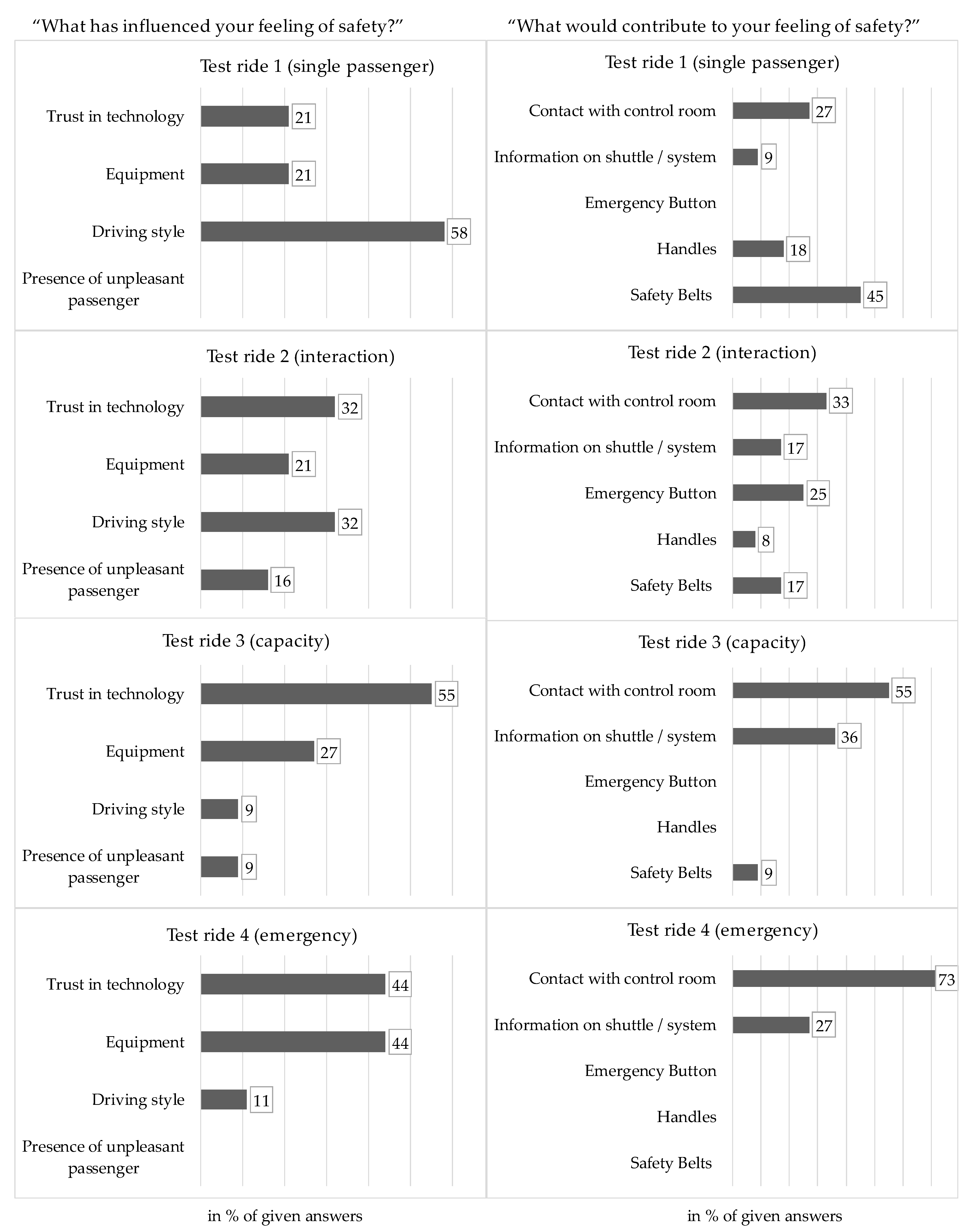
- Test ride 1 (riding as single passenger): The task for the passenger was to ride the autonomous shuttle alone (no steward or driver present). The instruction to the passenger was to ride the driverless shuttle on his or her own from a starting point to a predefined stop.
- Test ride 2 (interacting with another passenger): The aim of the second test ride was to explore perceived safety with other passengers on board. The instruction was to ride from a starting point to a predefined stop. This time, an actor (member of the research team), posing as an annoying passenger entered the shuttle. As soon as the shuttle departed, the actor started to behave in an unpleasant manner. He listened to loud music, situated himself closely to the passenger and gesticulated wildly in order to provoke a small-to-modest inconvenience.
- Test ride 3 (capacity management/technical difficulties): Test ride 3 dealt with capacity limits of the shuttle. Several passengers, exceeding the number of permitted passengers (six), were given the task to ride from a starting point to a predefined stop or to get on an already full shuttle. Passengers had the option of either entering the shuttle regardless of the overcrowded conditions or waiting until the shuttle returned.
- Test ride 4 (emergency/technical difficulties): The aim of this test ride was to learn about passengers’ perceived safety in case of a sudden, unexpected stop during the test ride between two stops. Six passengers at a time were asked to ride from a starting point to a predefined stop. The shuttle stopped during this journey abruptly and unexpectedly. After 60 s, an announcement was made indicating the detection of a technical problem and the continuation of the ride after correction of the defect. If the passengers contacted the control room before the expiration of the 60 s, no announcement was made. If the passengers did not show any reaction 120 s after the announcement in form of contacting the control room or leaving the shuttle, the announcement was repeated every 30 s. After approximately 6 min, the shuttle continued its ride and drove the remaining passengers to the predefined stop.
2.4. Questionnaires and Coding of Answers
3. Results
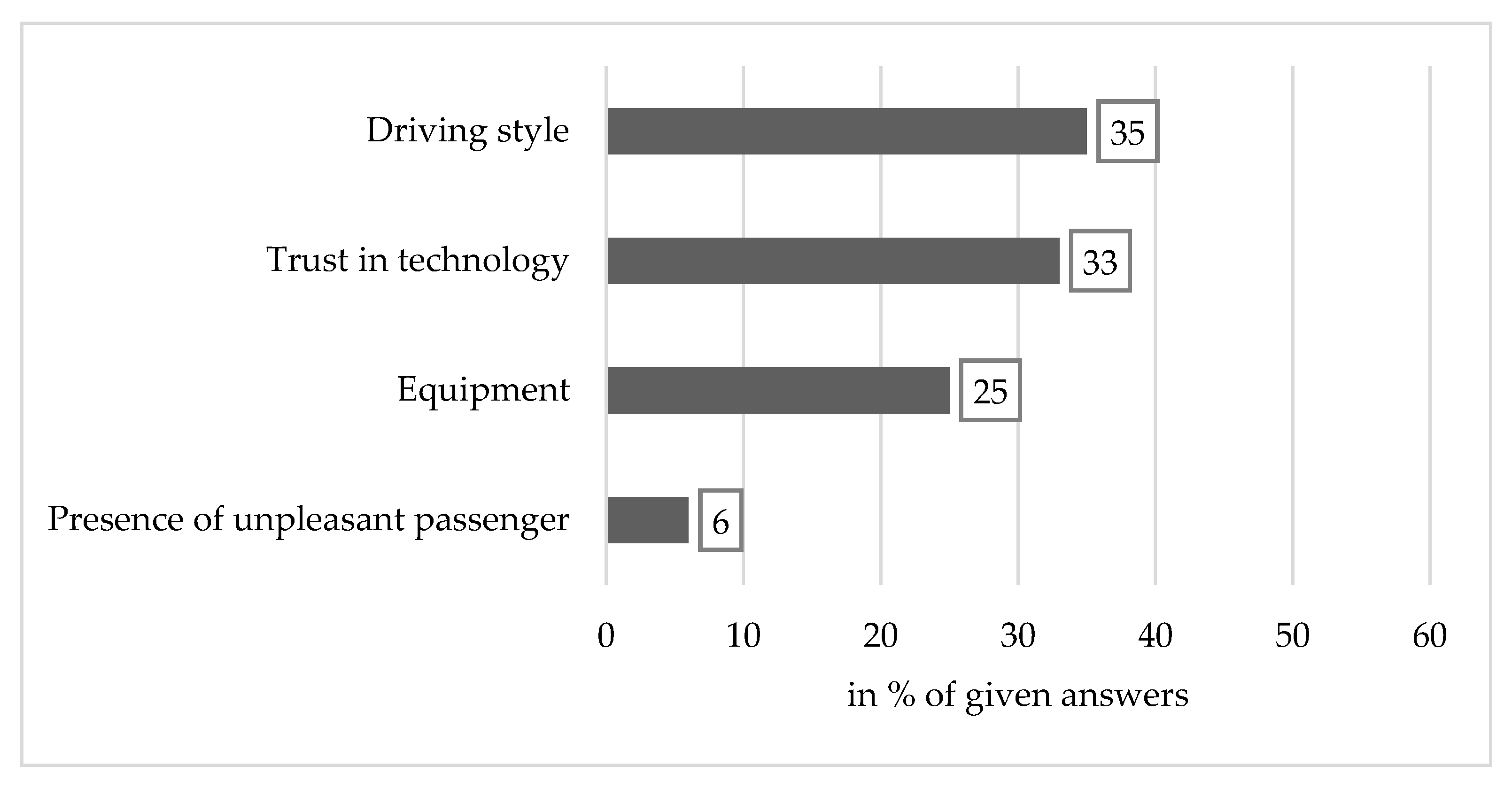
3.1. Factors That Influenced Perceived Safety
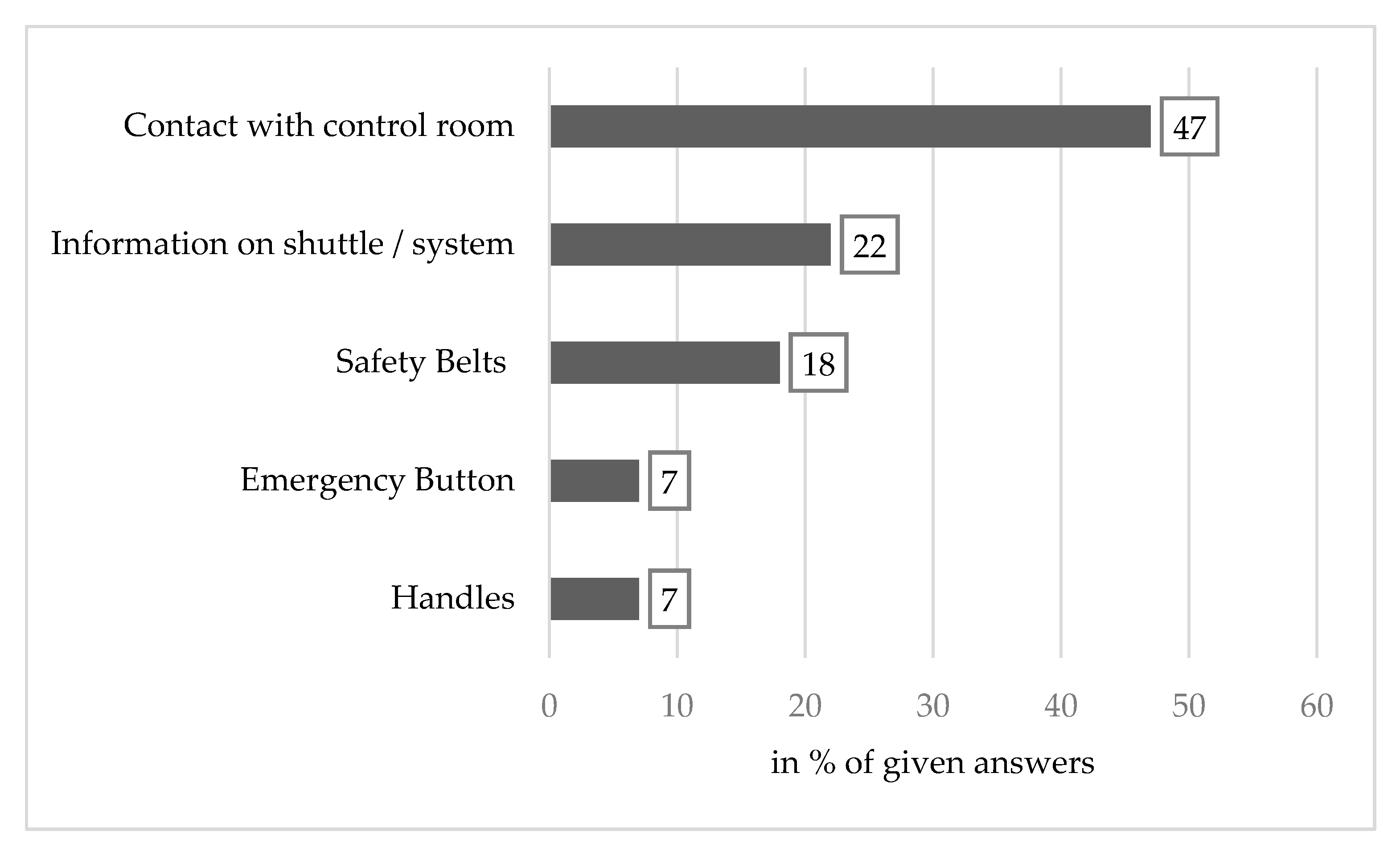
3.2. Suggestions for Increasing Perceived Safety
3.3. Results of Test Rides
4. Discussion
Limitations of the Study
5. Conclusions
- The main conclusions of our explorative study are that driving style of the shuttle and trust in technology were significant factors that influenced passengers’ perceived safety.
- Readily available contact with someone in a control room would significantly contribute to an increase in perceived safety while riding a driverless shuttle.
- While driving style was important, it was mentioned less as passengers got experienced in use with the shuttle.
- For researchers as well as technicians in the field of autonomous driving, our findings could influence the design and set-up of driverless shuttles in order to increase perceived safety, for example, how to signal passengers that there is always contact to someone in a control room possible who is assisting (not only) in the case of an emergency, or to explore the best way to instill trust in the technology of AVs in passengers. With attention to concerns of potential passengers and more experience of passengers in shuttles, this will help to foster acceptance of AVs in society.
- Future research should explore our findings in an even more natural setting, e.g., a controlled mixed traffic environment with dynamic traffic situations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- Your age:
- Your gender:
- Do you have any knowledge about automated vehicles? (single choice format)
- ○
- Yes, I have in-depth knowledge about it.
- ○
- Yes, I have a basic understanding.
- ○
- Yes, I have heard about it.
- ○
- No
- How save did you feel during the ride? (single choice format)
- ○
- Very safe
- ○
- Safe
- ○
- Less safe
- ○
- Not safe
- Which factors had an effect on your feeling of safety? (open-ended question)
- What could increase your feeling of safety? (open-ended question)
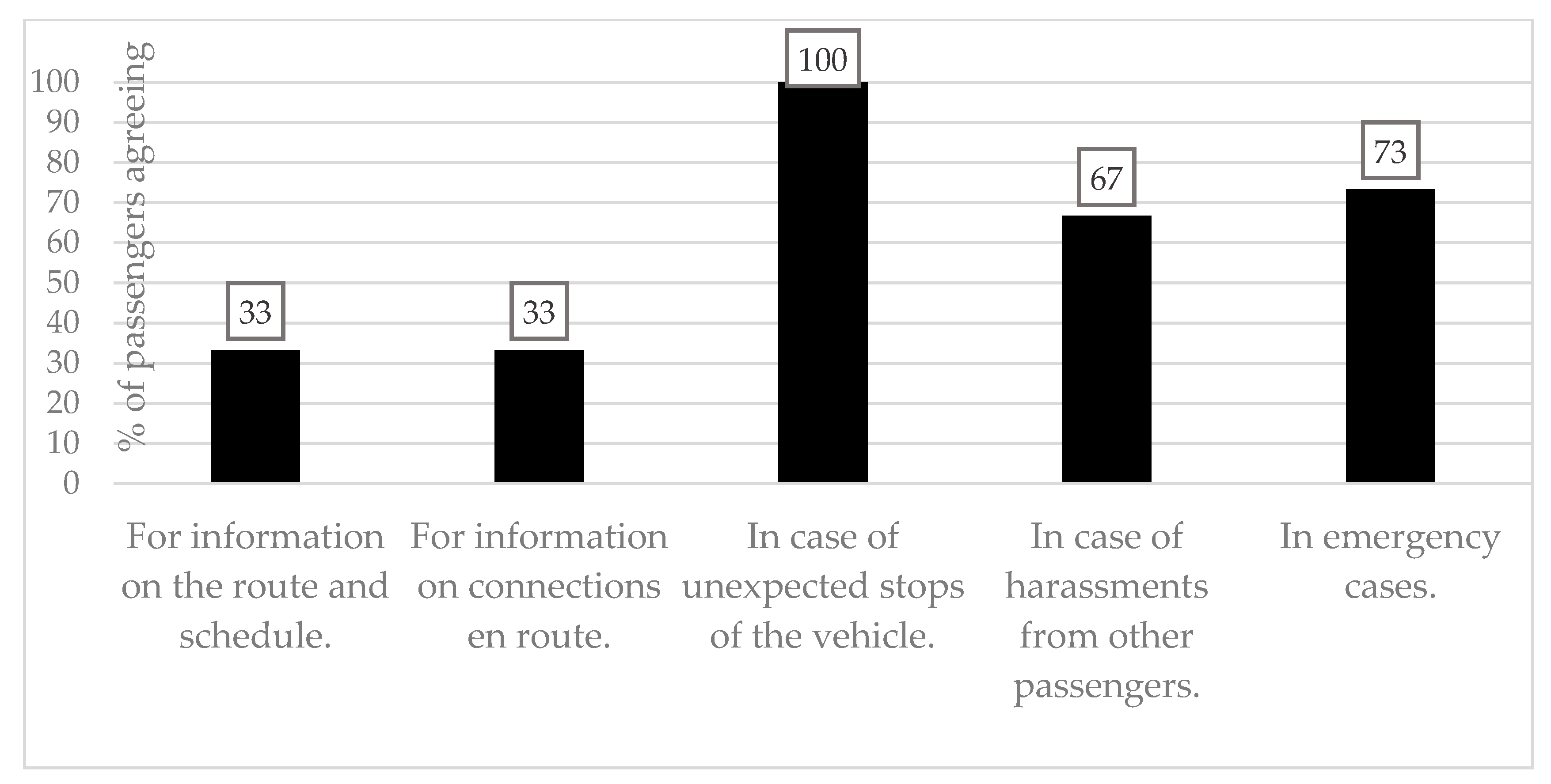
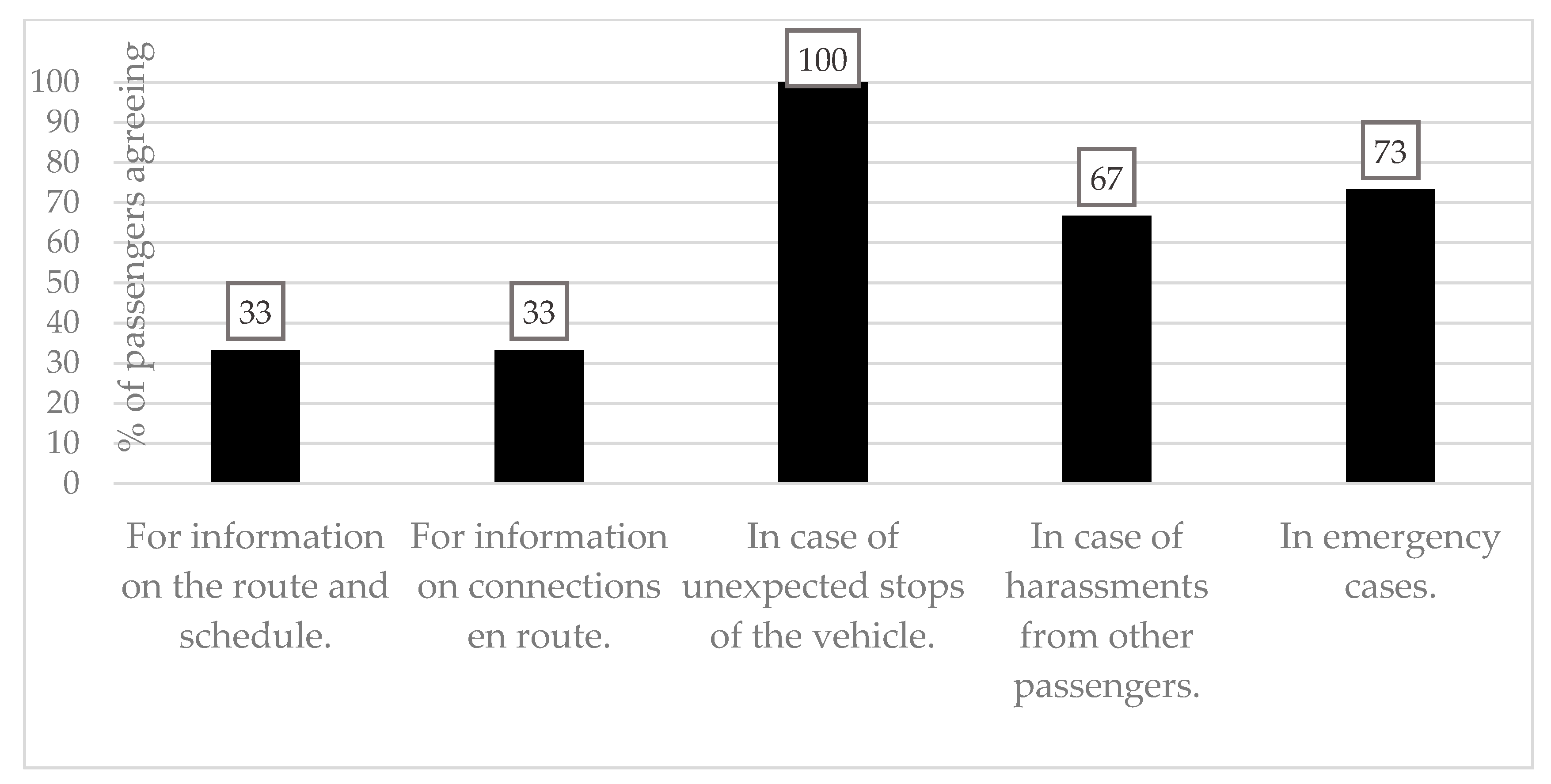
- In which situations would you use an audio or a video connection to someone in a control room?
- ○
- For information on the route and schedule. (yes/no)
- ○
- For information on connections en route. (yes/no)
- ○
- In case of unexpected stops of the vehicle. (yes/no)
- ○
- In case of harassments from other passengers. (yes/no)
- ○
- In emergency cases. (yes/no)
- What factors would you consider necessary for the automated shuttle to be safe in future traffic?
- ○
- The automated shuttle drives in its own lane without other road users around. (yes/no)
- ○
- The automated shuttle behaves just like a shuttle with a human driver. (yes/no)
References
- Wang, Z.; Bian, Y.; Shladover, S.E.; Wu, G.; Li, S.E.; Barth, M.J. A Survey on Cooperative Longitudinal Motion Control of Multiple Connected and Automated Vehicles. IEEE Intell. Transp. Syst. Mag. 2020, 12, 4–24. [Google Scholar] [CrossRef]
- SAE Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles—SAE International. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 27 October 2021).
- Mitteregger, M.; Bruck, E.M.; Soteropoulos, A.; Stickler, A.; Berger, M.; Dangschat, J.S.; Scheuvens, R.; Banerjee, I. AVENUE 21. Automatisierter und Vernetzter Verkehr; Daimler und Benz Stiftung; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef] [Green Version]
- Stegmüller, S.; Werner, M.; Kern, M. Akzeptanzstudie “Robocab”. Autonome Mobilitätskonzepte aus Sicht der Nutzer; Fraunhofer IAO: Stuttgart, Germany, 2019. [Google Scholar]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Payre, W.; Cestac, J.; Delhomme, P. Intention to use a fully automated car: Attitudes and a priori acceptability. Transp. Res. Part F Traffic Psychol. Behav. 2014, 27, 252–263. [Google Scholar] [CrossRef] [Green Version]
- Hohenberger, C.; Spörrle, M.; Welpe, I.M. How and why do men and women differ in their willingness to use automated cars? The influence of emotions across different age groups. Transp. Res. Part A Policy Pract. 2016, 94, 374–385. [Google Scholar] [CrossRef]
- Rice, S.; Winter, S.R. Do gender and age affect willingness to ride in driverless vehicles: If so, then why? Technol. Soc. 2019, 58, 101–145. [Google Scholar] [CrossRef]
- Fraedrich, E.; Beiker, S.; Lenz, B. Transition pathways to fully automated driving and its implications for the sociotechnical system of automobility. Eur. J. Future Res. 2015, 3, 11. [Google Scholar] [CrossRef] [Green Version]
- Shabanpour, R.; Golshani, N.; Shamshiripour, A.; Mohammadian, A. (Kouros) Eliciting preferences for adoption of fully automated vehicles using best-worst analysis. Transp. Res. Part C Emerg. Technol. 2018, 93, 463–478. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A Survey of Public Opinion about Autonomous and Self-Driving Vehicles in the U.S., the U.K., and Australia; University of Michigan, Transportation Research Institute: Ann Arbor, MI, USA, 2014; pp. 1–38. [Google Scholar]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Howard, D.; Dai, D. Public Perceptions of Self-driving Cars: The case of Berkeley, California. In Proceedings of the Transportation Research Board 93rd Annual Meeting, Washington, DC, USA, 12–16 January 2014; pp. 226–243. [Google Scholar]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; De Winter, J.C.F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Rehrl, K.; Zankl, C. Digibus©: Results from the first self-driving shuttle trial on a public road in Austria. Eur. Transp. Res. Rev. 2018, 10, 51. [Google Scholar] [CrossRef]
- Mahdavian, A.; Shojaei, A.; McCormick, S.; Papandreou, T.; Eluru, N.; Oloufa, A.A. Drivers and Barriers to Implementation of Connected, Automated, Shared, and Electric Vehicles: An Agenda for Future Research. IEEE Access 2021, 9, 22195–22213. [Google Scholar] [CrossRef]
- Parasuraman, R.; Riley, V. Humans and Automation: Use, Misuse, Disuse, Abuse: Hum. Factors 2016, 39, 230–253. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; Kyriakidis, M.; de Winter, J. An International Crowdsourcing Study into People’s Statements on Fully Automated Driving. Procedia Manuf. 2015, 3, 2534–2542. [Google Scholar] [CrossRef] [Green Version]
- Moody, J.; Bailey, N.; Zhao, J. Public perceptions of autonomous vehicle safety: An international comparison. Saf. Sci. 2020, 121, 634–650. [Google Scholar] [CrossRef]
- Nordhoff, S.; Kyriakidis, M.; van Arem, B.; Happee, R. A multi-level model on automated vehicle acceptance (MAVA): A review-based study. Theor. Issues Ergon. Sci. 2019, 20, 682–710. [Google Scholar] [CrossRef] [Green Version]
- Eden, G.; Nanchen, B.; Ramseyer, R.; Evéquoz, F. Expectation and Experience: Passenger Acceptance of Autonomous Public Transportation Vehicles. Lect. Notes Comput. Sci. 2017, 10516 LNCS, 360–363. [Google Scholar] [CrossRef] [Green Version]
- Ekman, F.; Johansson, M.; Bligård, L.O.; Karlsson, M.A.; Strömberg, H. Exploring automated vehicle driving styles as a source of trust information. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 268–279. [Google Scholar] [CrossRef]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Portouli, E.; Karaseitanidis, G.; Lytrivis, P.; Amditis, A.; Raptis, O.; Karaberi, C. Public attitudes towards autonomous mini buses operating in real conditions in a Hellenic city. IEEE Intell. Veh. Symp. Proc. 2017, 4, 571–576. [Google Scholar] [CrossRef]
- Benenson, R.; Fraichard, T.; Parent, M. Achievable safety of driverless ground vehicles. In Proceedings of the 10th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; pp. 515–521. [Google Scholar]
- Haeuslschmid, R.; Von Buelow, M.; Pfleging, B.; Butz, A. Supporting trust in autonomous driving. In Proceedings of the 22nd International Conference on Intelligent User Interfaces, Limassol, Cyprus, 13–16 March 2017; pp. 319–329. [Google Scholar] [CrossRef]
- König, A.; Grippenkoven, J.D. Ridepooling, Mobility-on-demand, fahrerlose Busshuttles—Zur Psychologie des Teilens von Fahrten in bedarfsgesteuerten Mobilitätskonzepten. J. Mobil. Verk. 2019, 2, 10–22. [Google Scholar] [CrossRef]
- Azad, M.; Hoseinzadeh, N.; Brakewood, C.; Cherry, C.R.; Han, L.D. Fully Autonomous Buses: A Literature Review and Future Research Directions. J. Adv. Transp. 2019, 2019, 4603548. [Google Scholar] [CrossRef] [Green Version]
- Salonen, A.O. Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 2018, 61, 106–110. [Google Scholar] [CrossRef]
- Singh, P.; Dulebenets, M.A.; Pasha, J.; Gonzalez, E.D.R.S.; Lau, Y.; Kampmann, R. Deployment of Autonomous Trains in Rail Transportation: Current Trends and Existing Challenges. IEEE Access 2021, 9, 1. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z. How Safe Is Safe Enough for Self-Driving Vehicles? Risk Anal. 2019, 39, 315–325. [Google Scholar] [CrossRef]
- Waycaster, G.C.; Matsumura, T.; Bilotkach, V.; Haftka, R.T.; Kim, N.H. Review of Regulatory Emphasis on Transportation Safety in the United States, 2002–2009: Public versus Private Modes. Risk Anal. 2018, 38, 1085–1101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hewitt, C.; Amanatidis, T.; Politis, I.; Sarkar, A. Assessing public perception of self-driving cars: The autonomous vehicle acceptance model. Int. Conf. Intell. User Interfaces Proc. IUI 2019, F1476, 518–527. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z. Public Acceptance of Fully Automated Driving: Effects of Social Trust and Risk/Benefit Perceptions. Risk Anal. 2019, 39, 326–341. [Google Scholar] [CrossRef] [PubMed]
- Cartenì, A. The acceptability value of autonomous vehicles: A quantitative analysis of the willingness to pay for shared autonomous vehicles (SAVs) mobility services. Transp. Res. Interdiscip. Perspect. 2020, 8, 100224. [Google Scholar] [CrossRef]
- Bartneck, C.; Kanda, T.; Mubin, O.; Al Mahmud, A. Does the Design of a Robot Influence Its Animacy and Perceived Intelligence? Int. J. Soc. Robot. 2009, 1, 195–204. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-G.; Kim, K.J.; Lee, S.; Shin, D.-H. Can Autonomous Vehicles Be Safe and Trustworthy? Effects of Appearance and Autonomy of Unmanned Driving Systems. Int. J. Hum. Comput. Interact. 2015, 31, 682–691. [Google Scholar] [CrossRef]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum. Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Koo, J.; Kwac, J.; Ju, W.; Steinert, M.; Leifer, L.; Nass, C. Why did my car just do that? Explaining semi-autonomous driving actions to improve driver understanding, trust, and performance. Int. J. Interact. Des. Manuf. 2014, 9, 269–275. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Payre, W.; van Arem, B.; Happee, R. What impressions do users have after a ride in an automated shuttle? An interview study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 252–269. [Google Scholar] [CrossRef] [Green Version]
- Kostorz, N.; Hilgert, T.; Kagerbauer, M. Automatisierte Kleinbusse im Öffentlichen Personennahverkehr—Akzeptanz und Nutzungsintentionen in Deutschland. J. Mobil. Verk. 2019, 2, 23–32. [Google Scholar] [CrossRef]
- Paddeu, D.; Parkhurst, G.; Shergold, I. Passenger comfort and trust on first-time use of a shared autonomous shuttle vehicle. Transp. Res. Part C Emerg. Technol. 2020, 115, 102604. [Google Scholar] [CrossRef]
- O’Cathain, A.; Thomas, K.J. “Any other comments?” Open questions on questionnaires—A bane or a bonus to research? BMC Med. Res. Methodol. 2004, 4, 25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fink, A. How to Conduct Surveys: A Step-by-Step Guide; SAGE Publications: Thousand Oaks, CA, USA, 2006. [Google Scholar]
- Agresti, A. An Introduction to Categorical Data Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Bakalos, N.; Papadakis, N.; Litke, A. Public Perception of Autonomous Mobility Using ML-Based Sentiment Analysis over Social Media Data. Logistics 2020, 4, 12. [Google Scholar] [CrossRef]
- Ly, K.; Soman, D. Nudging Around The World; Rotman School of Management: Toronto, ON, Canada, 2013. [Google Scholar]
- Eden, G.; Nanchen, B.; Ramseyer, R.; Eveìquoz, F. On the road with an autonomous passenger shuttle: Integration in public spaces. Conf. Hum. Factors Comput. Syst. Proc. 2017, F1276, 1569–1576. [Google Scholar] [CrossRef]
- Hilgarter, K.; Granig, P. Public perception of autonomous vehicles: A qualitative study based on interviews after riding an autonomous shuttle. Transp. Res. Part F Traffic Psychol. Behav. 2020, 72, 226–243. [Google Scholar] [CrossRef]
- Chee, P.N.E.; Susilo, Y.O.; Wong, Y.D.; Pernestål, A. Which factors affect willingness-to-pay for automated vehicle services? Evidence from public road deployment in Stockholm, Sweden. Eur. Transp. Res. Rev. 2020, 12, 20. [Google Scholar] [CrossRef]
- Haghzare, S.; Campos, J.L.; Bak, K.; Mihailidis, A. Older adults’ acceptance of fully automated vehicles: Effects of exposure, driving style, age, and driving conditions. Accid. Anal. Prev. 2021, 150, 105919. [Google Scholar] [CrossRef] [PubMed]
- Wicki, M.; Guidon, S.; Becker, F.; Axhausen, K.; Bernauer, T. How technology commitment affects mode choice for a self-driving shuttle service. Res. Transp. Bus. Manag. 2019, 32, 100458. [Google Scholar] [CrossRef]
- Liljamo, T.; Liimatainen, H.; Pöllänen, M. Attitudes and concerns on automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 24–44. [Google Scholar] [CrossRef]
- König, M.; Neumayr, L. Users’ resistance towards radical innovations: The case of the self-driving car. Transp. Res. Part F Traffic Psychol. Behav. 2017, 44, 42–52. [Google Scholar] [CrossRef]
- Niu, D.; Terken, J.; Eggen, B. Anthropomorphizing information to enhance trust in autonomous vehicles. Hum. Factors Ergon. Manuf. Serv. Ind. 2018, 28, 352–359. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luger-Bazinger, C.; Zankl, C.; Klieber, K.; Hornung-Prähauser, V.; Rehrl, K. Factors Influencing and Contributing to Perceived Safety of Passengers during Driverless Shuttle Rides. Future Transp. 2021, 1, 657-671. https://doi.org/10.3390/futuretransp1030035
Luger-Bazinger C, Zankl C, Klieber K, Hornung-Prähauser V, Rehrl K. Factors Influencing and Contributing to Perceived Safety of Passengers during Driverless Shuttle Rides. Future Transportation. 2021; 1(3):657-671. https://doi.org/10.3390/futuretransp1030035
Chicago/Turabian StyleLuger-Bazinger, Claudia, Cornelia Zankl, Karin Klieber, Veronika Hornung-Prähauser, and Karl Rehrl. 2021. "Factors Influencing and Contributing to Perceived Safety of Passengers during Driverless Shuttle Rides" Future Transportation 1, no. 3: 657-671. https://doi.org/10.3390/futuretransp1030035
APA StyleLuger-Bazinger, C., Zankl, C., Klieber, K., Hornung-Prähauser, V., & Rehrl, K. (2021). Factors Influencing and Contributing to Perceived Safety of Passengers during Driverless Shuttle Rides. Future Transportation, 1(3), 657-671. https://doi.org/10.3390/futuretransp1030035