
Land Use and Land Cover (LULC) Mapping Accuracy Using Single-Date Sentinel-2 MSI Imagery with Random Forest and Classification and Regression Tree Classifiers




Abstract
1. Introduction
2. Materials and Methods
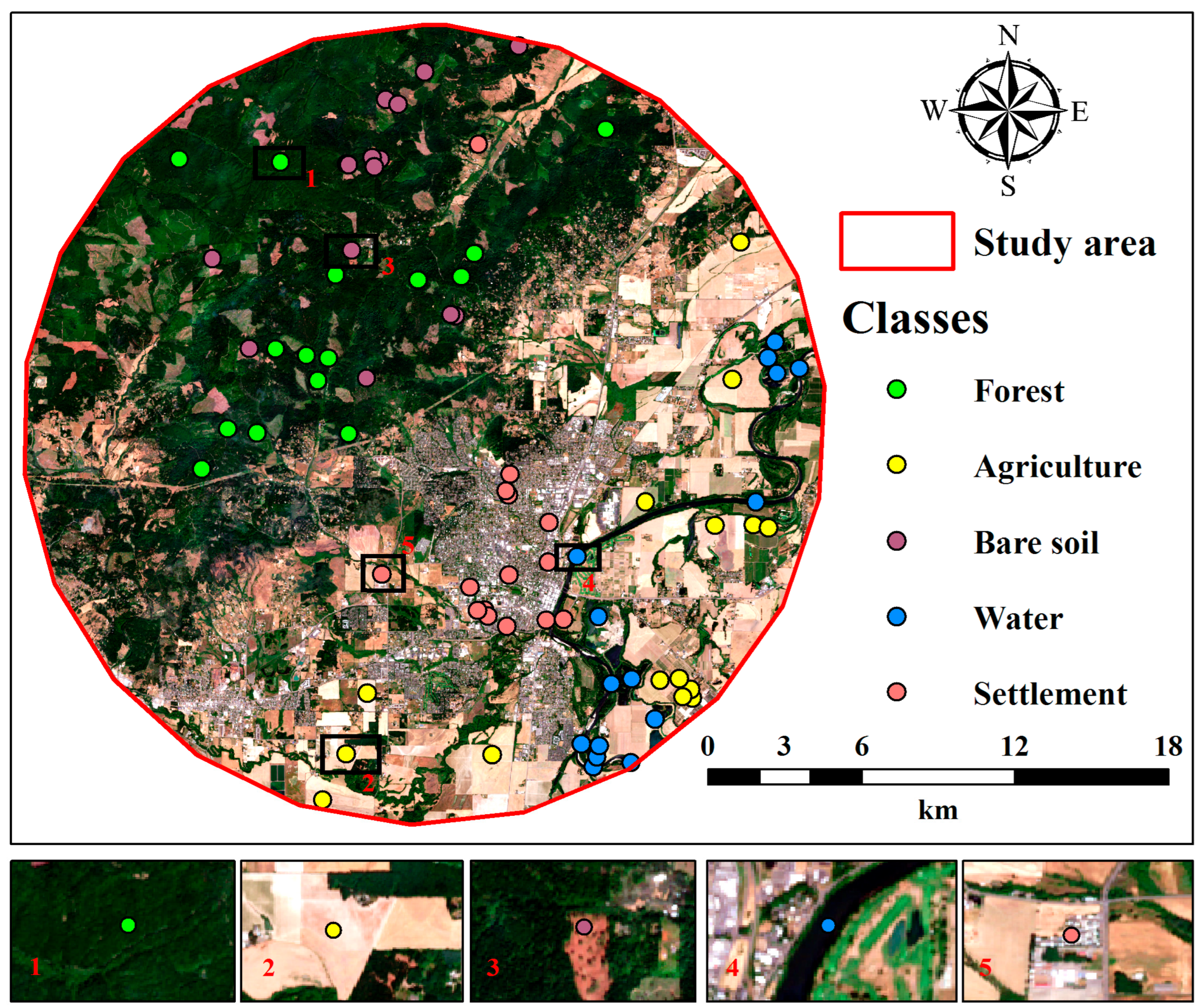
2.1. Study Area
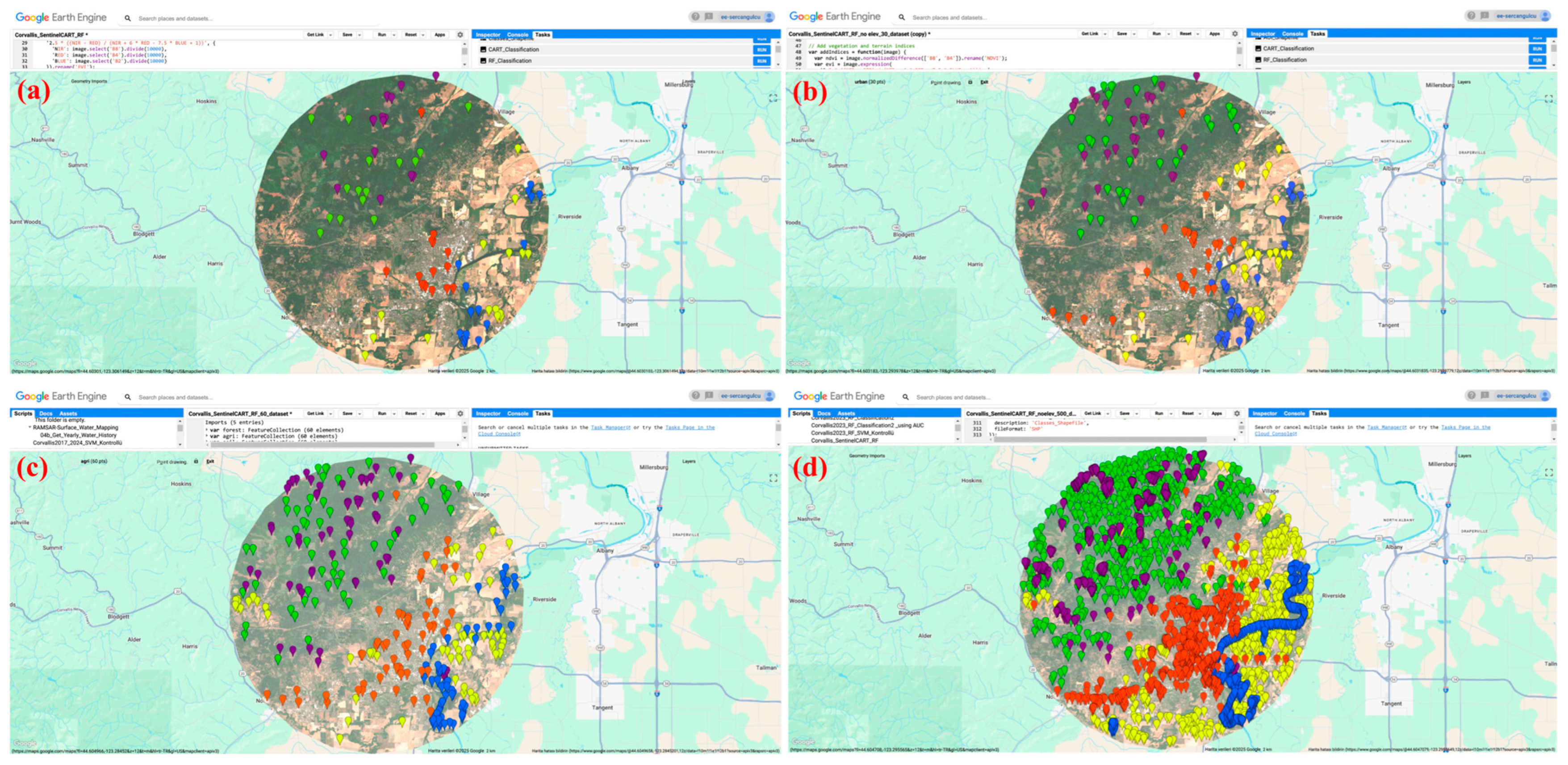
2.2. Data Acquisition and Processing
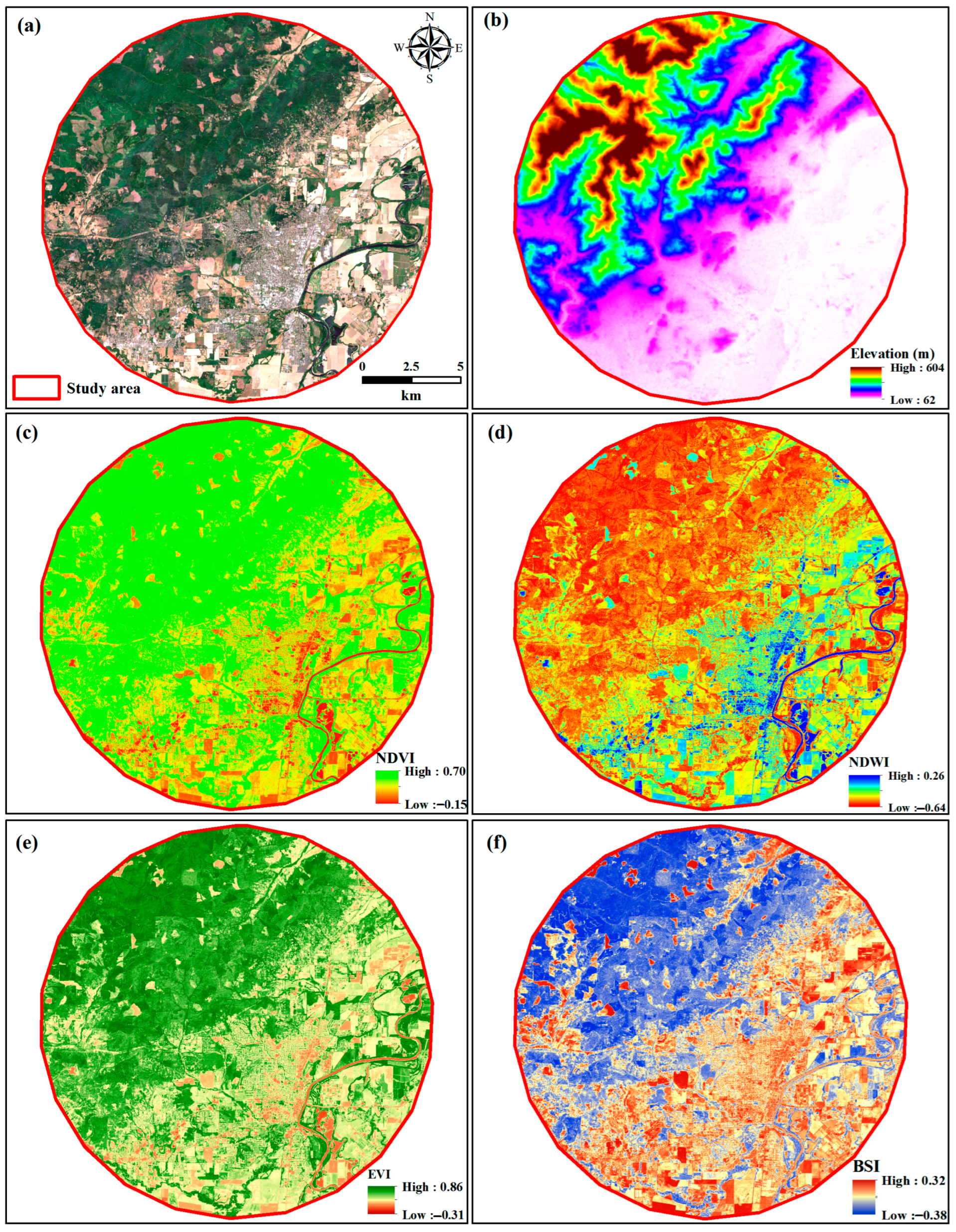
2.3. Vegetation Indices and Terrain Data
| var addIndices = function(image) { var ndvi = image.normalizedDifference(['B8', 'B4']).rename('NDVI'); var evi = image.expression( '2.5 * ((IR - RED)/(IR + 6 * RED - 7.5 * BLUE + 1))', { 'IR': image.select('B8').divide(10000), 'RED': image.select('B4').divide(10000), 'BLUE': image.select('B2').divide(10000) }).rename('EVI'); var ndwi = image.normalizedDifference(['B3', 'B8']).rename('NDWI'); var bsi = image.expression( '((SWIR1 + RED) - (NIR + BLUE))/((SWIR1 + RED) + (NIR + BLUE))', { 'SWIR1': image.select('B11'), 'RED': image.select('B4'), 'NIR': image.select('B8'), 'BLUE': image.select('B2') }).rename('BSI'); return image.addBands([ndvi, evi, ndwi, bsi]); }; |
2.4. RF and CART Classifiers
2.5. Accuracy Assessment
3. Results
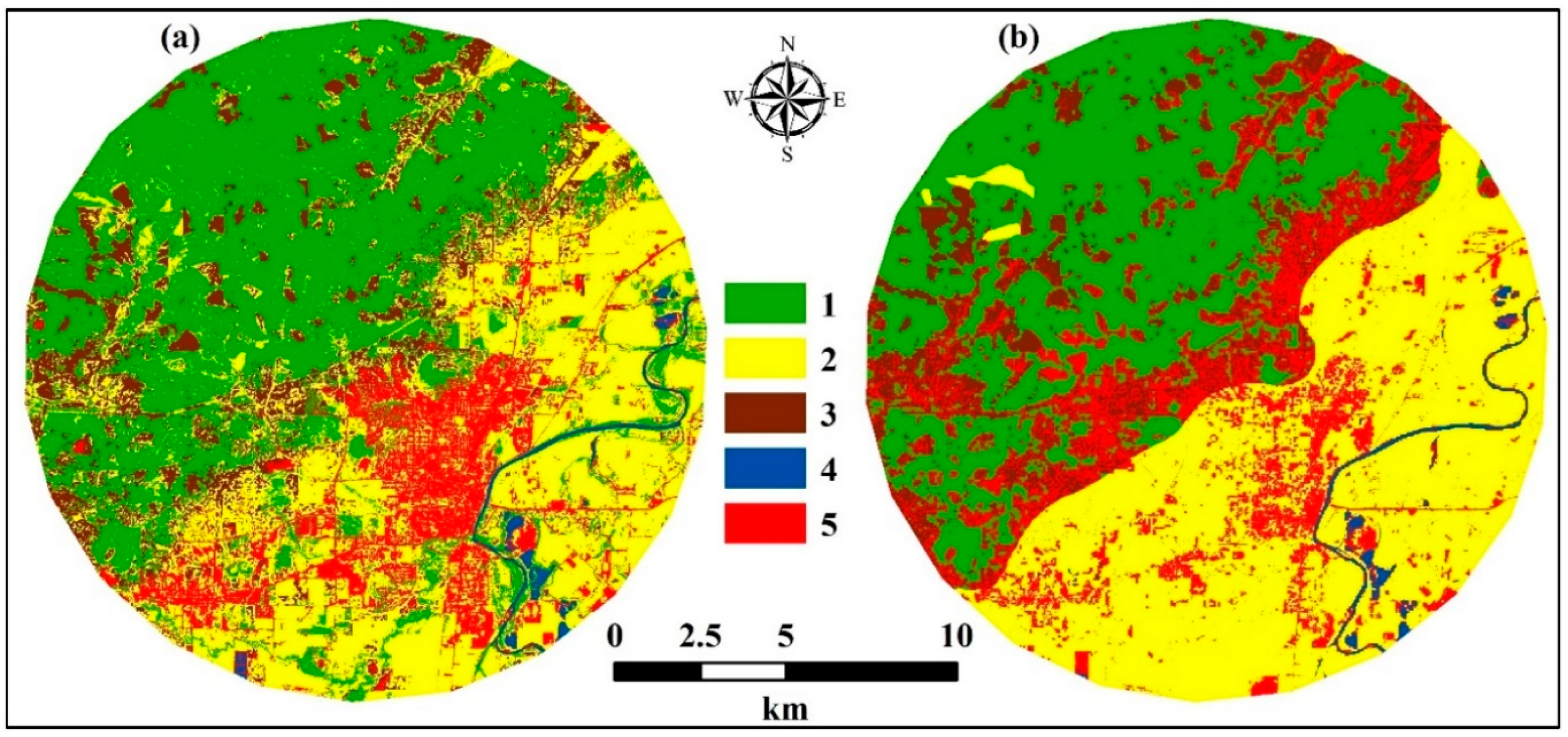
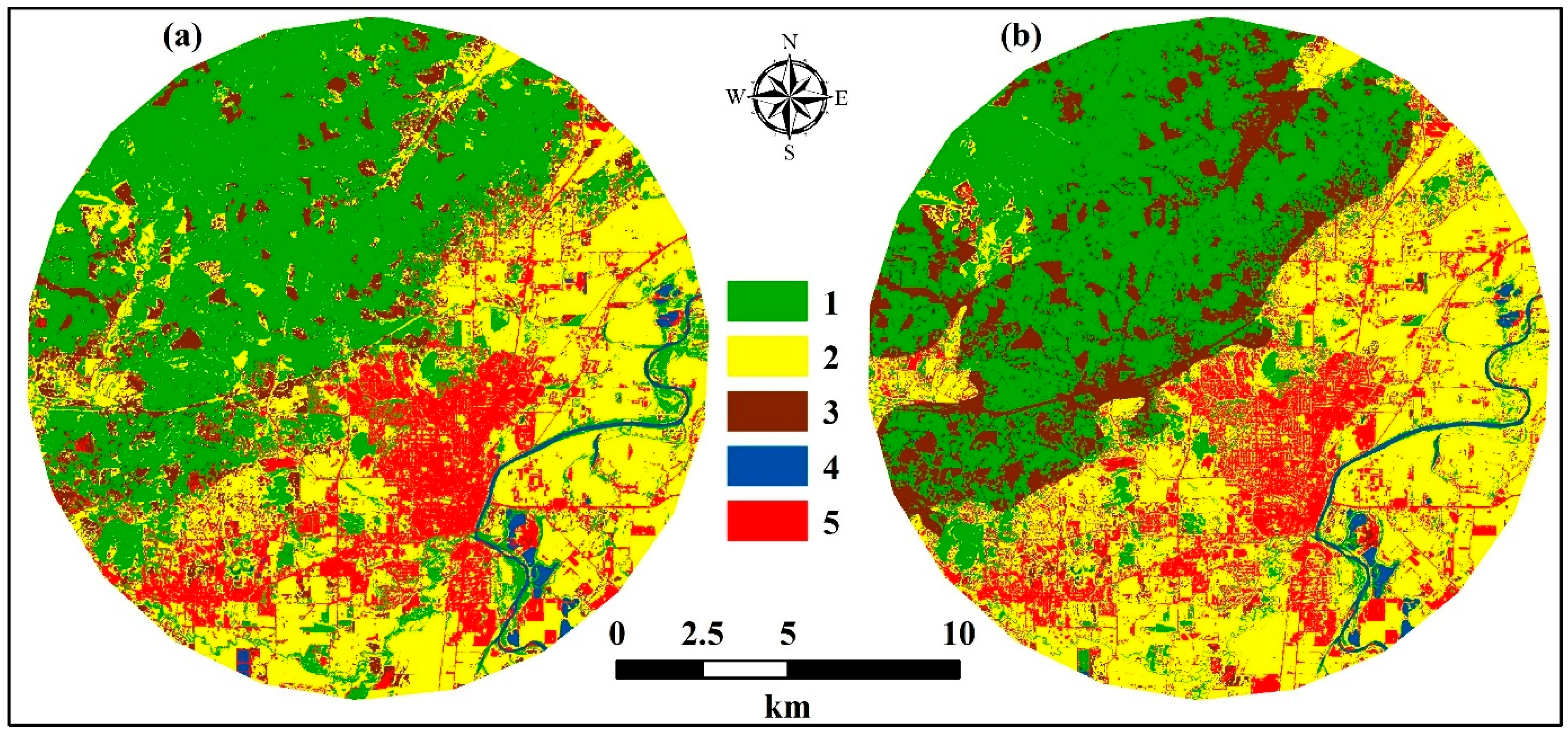
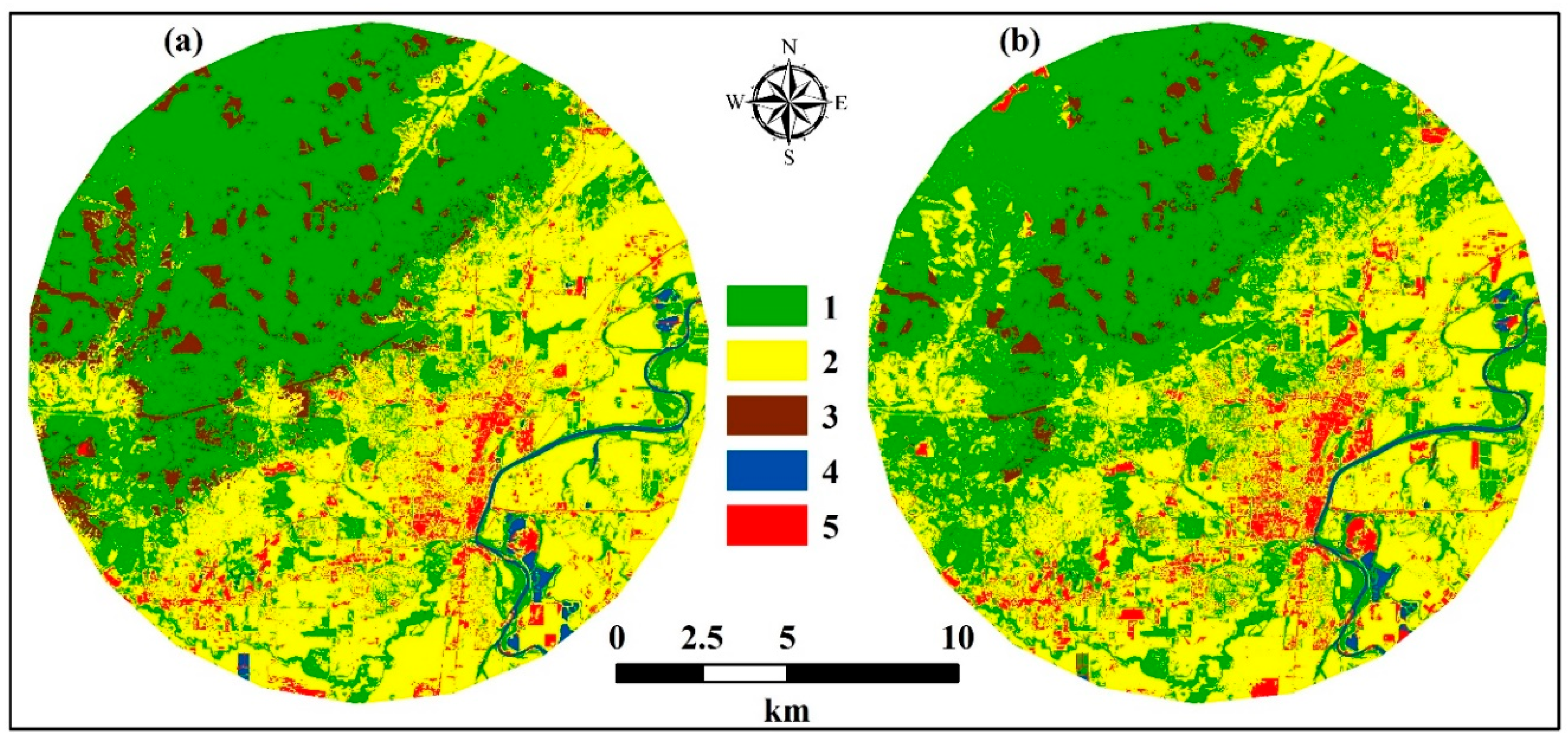
3.1. LULC Classification Maps Without Elevation
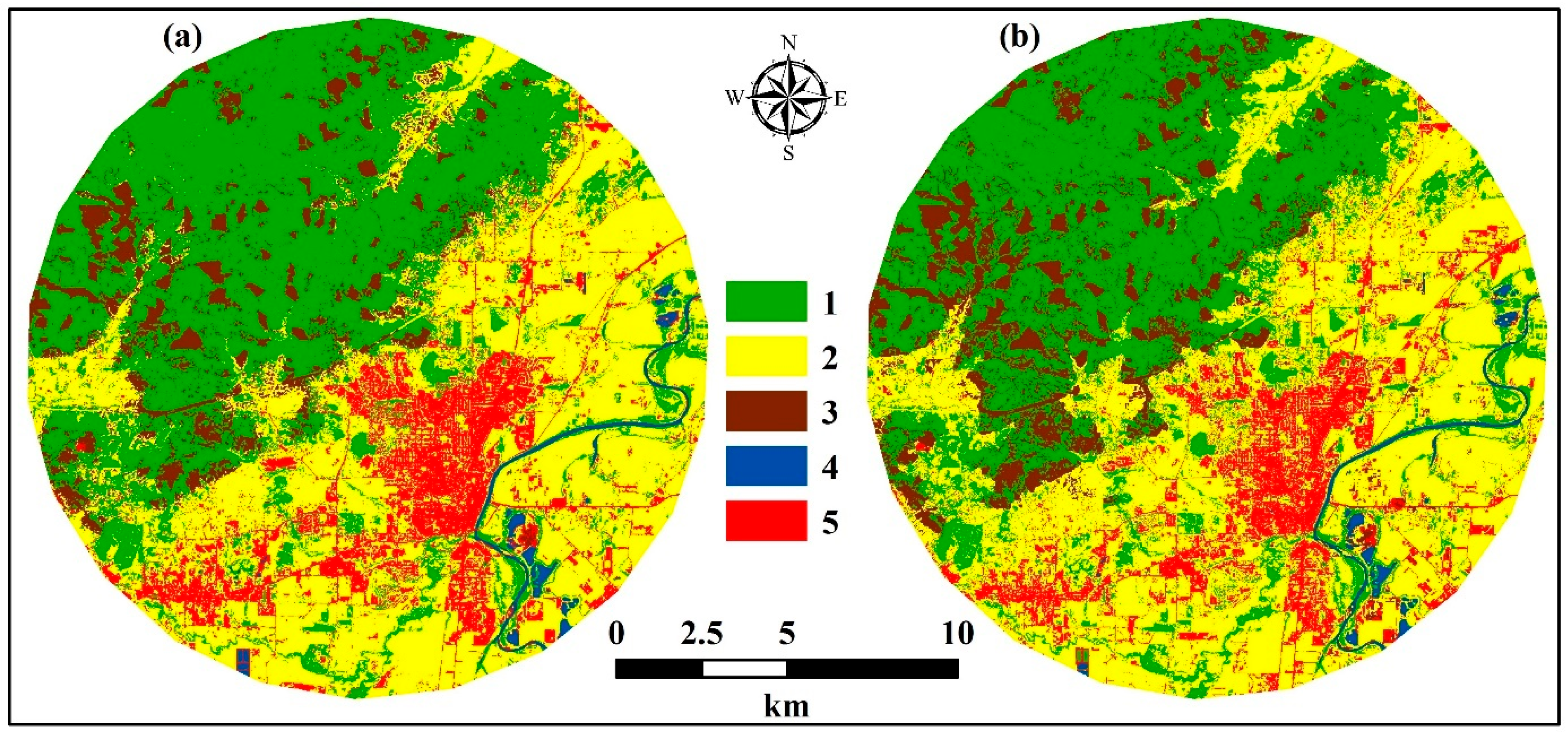
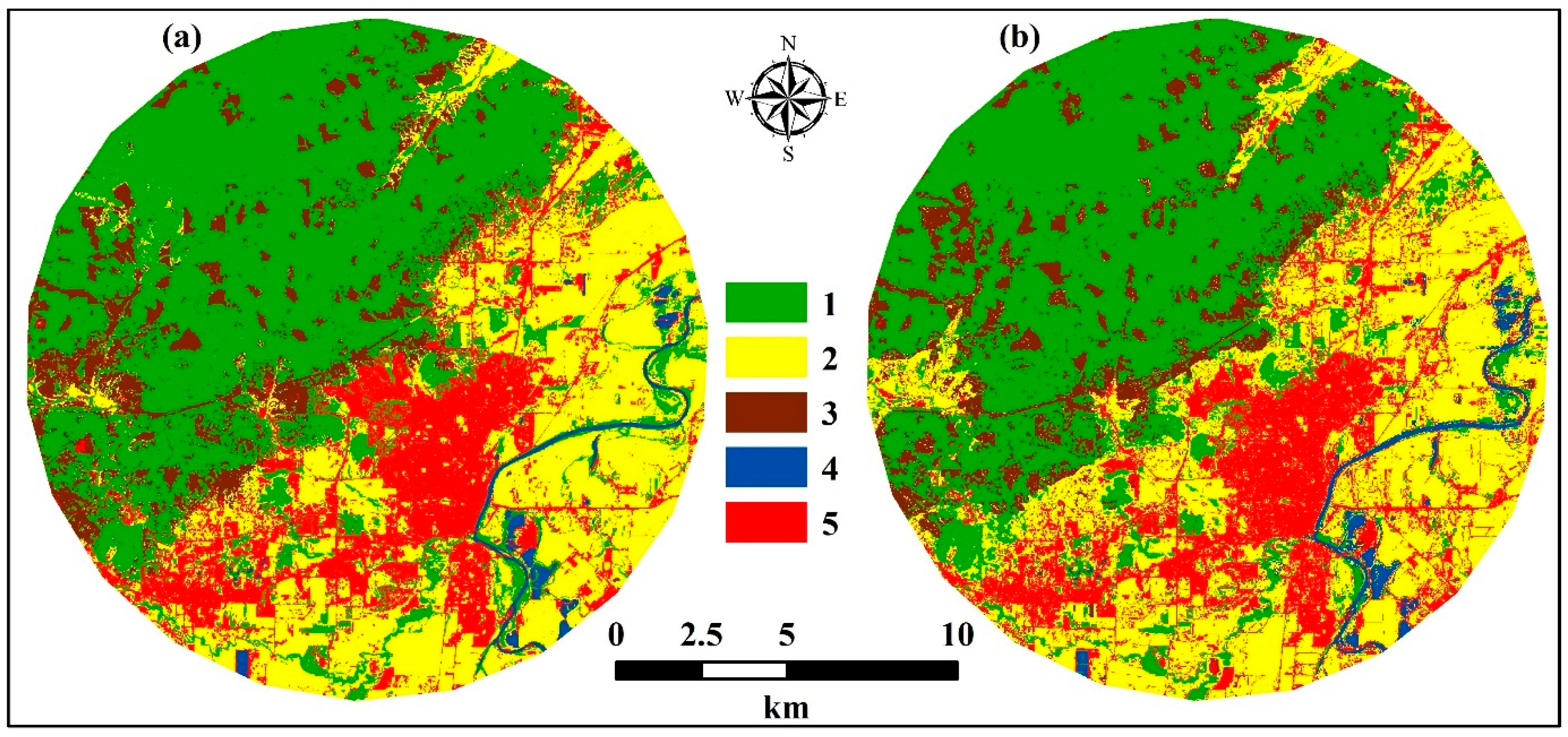
3.2. LULC Classification Maps with Elevation Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GEE | Google Earth Engine |
| LULC | Land use and land cover |
| MSI | Multi-Spectral Instrument |
| SRTM | Shuttle Radar Topography Mission |
| RF | Random Forest |
| CART | Classification and Regression Trees |
| USA | United States of America |
| NDVI | Normalized Difference Vegetation Index |
| NDWI | Normalized Difference Water Index |
| EVI | Enhanced Vegetation Index |
| BSI | Bare Soil Index |
| DEM | Digital Elevation Model |
| RS | Remote Sensing |
| GIS | Geographical Information System |
| RGB | Red–Green–Blue |
| SR | Surface Reflectance |
| S2 | Sentinel-2 |
| SWIR | Short Wavelength Infrared |
References
- Tin, D.; Cheng, L.; Le, D.; Hata, R.; Ciottone, G. Natural disasters: A comprehensive study using EMDAT database 1995–2022. Public Health 2024, 226, 255–260. [Google Scholar] [CrossRef] [PubMed]
- Daimon, H.; Miyamae, R.; Wang, W. Navigating theories of actions on disaster prevention: A systematic review on disaster research in Japan. Nat. Hazards Rev. 2023, 24, 03123002-1–03123002-15. [Google Scholar] [CrossRef]
- Pratiti, R. An ecological approach to disaster mitigation: A literature review. Cureus 2023, 15, e45500. [Google Scholar] [CrossRef] [PubMed]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a global land cover characteristics database and IGBP DISCover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Khan, S.M.; Shafi, I.; Butt, W.H.; Diez, I.D.L.T.; Flores, M.A.L.; Galán, J.C.; Ashraf, I. A systematic review of disaster management systems: Approaches, challenges, and future directions. Land 2023, 12, 1514. [Google Scholar] [CrossRef]
- Scheffer, M.; Carpenter, S.; Foley, J.A.; Folke, C.; Walker, B. Catastrophic shifts in ecosystems. Nature 2001, 413, 591–596. [Google Scholar] [CrossRef]
- Hahn, W.A.; Knoke, T. Sustainable development and sustainable forestry: Analogies, differences, and the role of flexibility. Eur. J. For. Res. 2010, 129, 787–801. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Zhao, Q.; Yu, L.; Li, X.; Peng, D.; Zhang, Y.; Gong, P. Progress and trends in the application of Google Earth and Google Earth Engine. Remote Sens. 2021, 13, 3778. [Google Scholar] [CrossRef]
- Benhammou, Y.; Alcaraz-Segura, D.; Guirado, E.; Khaldi, R.; Achchab, B.; Herrera, F.; Tabik, S. Sentinel2GlobalLULC: A Sentinel-2 RGB image tile dataset for global land use/cover mapping with deep learning. Sci. Data 2022, 9, 681. [Google Scholar] [CrossRef]
- Talukdar, S.; Singha, P.; Mahato, S.; Shahfahad; Pal, S.; Liou, Y.-A.; Rahman, A. Land-use land-cover classification by machine learning classifiers for satellite observations—A review. Remote Sens. 2020, 12, 1135. [Google Scholar] [CrossRef]
- Gülci, S.; Gülci, N.; Yüksel, K. Monitoring water surface area and land cover change by using Landsat imagery for Aslantas Dam Lake and its vicinity. J. Inst. Sci. Technol. 2019, 9, 100–110. [Google Scholar] [CrossRef]
- Gülci, S.; Yüksel, K.; Gümüş, S.; Wing, M. Mapping Wildfires Using Sentinel 2 MSI and Landsat 8 Imagery: Spatial Data Generation for Forestry. Eur. J. For. Eng. 2021, 7, 57–66. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Farhadi, H.; Najafzadeh, M. Flood risk mapping by remote sensing data and random forest technique. Water 2021, 13, 3115. [Google Scholar] [CrossRef]
- Amani, M.; Mahdavi, S.; Afshar, M.; Brisco, B.; Huang, W.; Mohammad Javad Mirzadeh, S.; Hopkinson, C. Canadian wetland inventory using Google Earth Engine: The first map and preliminary results. Remote Sens. 2019, 11, 842. [Google Scholar] [CrossRef]
- Lobo, F.D.L.; Souza-Filho, P.W.M.; Novo, E.M.L.D.M.; Carlos, F.M.; Barbosa, C.C.F. Mapping mining areas in the Brazilian amazon using MSI/Sentinel-2 imagery (2017). Remote Sens. 2018, 10, 1178. [Google Scholar] [CrossRef]
- Senay, G.B.; Friedrichs, M.; Morton, C.; Parrish, G.E.; Schauer, M.; Khand, K.; Huntington, J. Mapping actual evapotranspiration using Landsat for the conterminous United States: Google Earth Engine implementation and assessment of the SSEBop model. Remote Sens. Environ. 2022, 275, 113011. [Google Scholar] [CrossRef]
- Franklin, S.E.; Dickson, E.E.; Hansen, M.J.; Farr, D.R.; Moskal, L.M. Quantification of landscape change from satellite remote sensing. For. Chron. 2000, 76, 877–886. [Google Scholar] [CrossRef]
- Agdas, M.G.; Yenen, Z. Determining land use/land cover (LULC) changes using remote sensing method in Lüleburgaz and LULC change’s impacts on SDGs. Eur. J. Sustain. Dev. 2023, 12, 1–24. [Google Scholar] [CrossRef]
- Lawrence, R.L.; Wright, A. Rule-based classification systems using classification and regression tree (CART) analysis. Photogramm. Eng. Remote Sens. 2001, 67, 1137–1142. [Google Scholar]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Pande, C.B.; Srivastava, A.; Moharir, K.N.; Radwan, N.; Mohd Sidek, L.; Alshehri, F.; Zhran, M. Characterizing land use/land cover change dynamics by an enhanced random forest machine learning model: A Google Earth Engine implementation. Environ. Sci. Eur. 2024, 36, 84. [Google Scholar] [CrossRef]
- Phan, T.N.; Kuch, V.; Lehnert, L.W. Land cover classification using google earth engine and random forest classifier—The role of image composition. Remote Sens. 2020, 12, 2411. [Google Scholar] [CrossRef]
- European Space Agency (ESA). Sentinel-2 MSI: MultiSpectral Instrument, Level-2A. Available online: https://s2.pages.eopf.copernicus.eu/pdfs-adfs/MSI/L2/PDFS_S2_MSI_L2.myst.html (accessed on 22 June 2025).
- Google Earth Engine Team. Google Earth Engine: A Planetary-Scale Geospatial Analysis Platform. Available online: https://earthengine.google.com (accessed on 12 January 2025).
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45, RG2004. [Google Scholar] [CrossRef]
- USGS. SRTMGL1 v003 NASA Shuttle Radar Topography Mission Global 1 Arc Second. Available online: https://lpdaac.usgs.gov/products/srtmgl1v003/ (accessed on 16 December 2024).
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Huete, A.R.; Liu, H.Q.; Batchily, K.; van Leeuwen, W. A comparison of vegetation indices global set of TM images for EOS-MODIS. Remote Sens. Environ. 1997, 59, 440–451. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Wu, C.; Chen, J.M.; Huang, N. Predicting gross primary production from the enhanced vegetation index and photosynthetically active radiation: Evaluation and calibration. Remote Sens. Environ. 2011, 115, 3424–3435. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees, 1st ed.; Chapman and Hall/CRC: New York, NY, USA, 1984; pp. 1–368. [Google Scholar] [CrossRef]
- GEE. The “Classifier” Package Handles Supervised Classification by Traditional ML Algorithms Running in Earth Engine. Available online: https://developers.google.com/earth-engine/guides/classification (accessed on 2 February 2025).
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2008; pp. 1–200. [Google Scholar] [CrossRef]
- Foody, G.M. Impacts of ignorance on the accuracy of image classification and thematic mapping. Remote Sens. Environ. 2021, 259, 112367. [Google Scholar] [CrossRef]
- Srivastava, A.; Bharadwaj, S.; Dubey, R.; Sharma, V.B.; Biswas, S. Mapping vegetation and measuring the performance of machine learning algorithm in LULC classification in the large area using Sentinel-2 and Landsat-8 datasets of Dehradun as a test case. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 529–535. [Google Scholar] [CrossRef]
- Yimer, S.M.; Bouanani, A.; Kumar, N.; Tischbein, B.; Borgemeister, C. Comparison of different machine-learning algorithms for land use land cover mapping in a heterogenous landscape over the Eastern Nile River basin, Ethiopia. Adv. Space Res. 2024, 74, 2180–2199. [Google Scholar] [CrossRef]
- Zafar, Z.; Zubair, M.; Zha, Y.; Fahd, S.; Nadeem, A.A. Performance assessment of machine learning algorithms for mapping of land use/land cover using remote sensing data. Egypt. J. Remote Sens. Space Sci. 2024, 27, 216–226. [Google Scholar] [CrossRef]
- Loukika, K.N.; Keesara, V.R.; Sridhar, V. Analysis of land use and land cover using machine learning algorithms on google earth engine for munneru river basin, India. Sustainability 2021, 13, 13758. [Google Scholar] [CrossRef]
- Zhao, Z.; Islam, F.; Waseem, L.A.; Tariq, A.; Nawaz, M.; Islam, I.U.; Hatamleh, W.A. Comparison of three machine learning algorithms using google earth engine for land use land cover classification. Rangel. Ecol. Manag. 2024, 92, 129–137. [Google Scholar] [CrossRef]
- Arpitha, M.; Ahmed, S.A.; Harishnaika, N. Land use and land cover classification using machine learning algorithms in google earth engine. Earth Sci. Inform. 2023, 16, 3057–3073. [Google Scholar] [CrossRef]
- Ayalke, G.Z.; Şişman, A. Machine learning-based improved land cover classification using Google Earth Engine: Case of Atakum, Samsun. Geomatik 2024, 9, 375–390. [Google Scholar] [CrossRef]
- Wickham, J.; Stehman, S.V.; Sorenson, D.G.; Gass, L.; Dewitz, J.A. Thematic accuracy assessment of the NLCD 2019 land cover for the conterminous United States. GIScience Remote Sens. 2023, 60, 2181143. [Google Scholar] [CrossRef]
- Lin, C.; Doyog, N.D. Challenges of retrieving LULC information in rural-forest mosaic landscapes using random forest technique. Forests 2023, 14, 816. [Google Scholar] [CrossRef]
- Kadri, N.; Jebari, S.; Augusseau, X.; Mahdhi, N.; Lestrelin, G.; Berndtsson, R. Analysis of four decades of land use and land cover change in semiarid Tunisia using Google Earth Engine. Remote Sens. 2023, 15, 3257. [Google Scholar] [CrossRef]
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Abdelsamie, E.A.; Mustafa, A.-r.A.; El-Sorogy, A.S.; Maswada, H.F.; Almadani, S.A.; Shokr, M.S.; El-Desoky, A.I.; Meroño de Larriva, J.E. Current and potential land use/land cover (LULC) scenarios in dry lands using a CA-Markov simulation model and the Classification and Regression Tree (CART) method: A cloud-based Google Earth Engine (GEE) approach. Sustainability 2024, 16, 11130. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Number | Central Wavelength (nm) | Resolution (m) |
|---|---|---|
| 2 | 490 | 10 |
| 3 | 560 | 10 |
| 4 | 665 | 10 |
| 8 | 842 | 10 |
| 11 | 1610 | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gülci, S.; Wing, M.; Akay, A.E. Land Use and Land Cover (LULC) Mapping Accuracy Using Single-Date Sentinel-2 MSI Imagery with Random Forest and Classification and Regression Tree Classifiers. Geomatics 2025, 5, 29. https://doi.org/10.3390/geomatics5030029
Gülci S, Wing M, Akay AE. Land Use and Land Cover (LULC) Mapping Accuracy Using Single-Date Sentinel-2 MSI Imagery with Random Forest and Classification and Regression Tree Classifiers. Geomatics. 2025; 5(3):29. https://doi.org/10.3390/geomatics5030029
Chicago/Turabian StyleGülci, Sercan, Michael Wing, and Abdullah Emin Akay. 2025. "Land Use and Land Cover (LULC) Mapping Accuracy Using Single-Date Sentinel-2 MSI Imagery with Random Forest and Classification and Regression Tree Classifiers" Geomatics 5, no. 3: 29. https://doi.org/10.3390/geomatics5030029
APA StyleGülci, S., Wing, M., & Akay, A. E. (2025). Land Use and Land Cover (LULC) Mapping Accuracy Using Single-Date Sentinel-2 MSI Imagery with Random Forest and Classification and Regression Tree Classifiers. Geomatics, 5(3), 29. https://doi.org/10.3390/geomatics5030029