
An Evaluation of Static Affordable Smartphone Positioning Performance Leveraging GPS/Galileo Measurements with Instantaneous CNES and Final IGS Products





Abstract
1. Introduction
2. Ionosphere-Free PPP Processing Model
3. GNSS Data Collection and Processing Methodology
4. Results and Analysis

5. Discussion
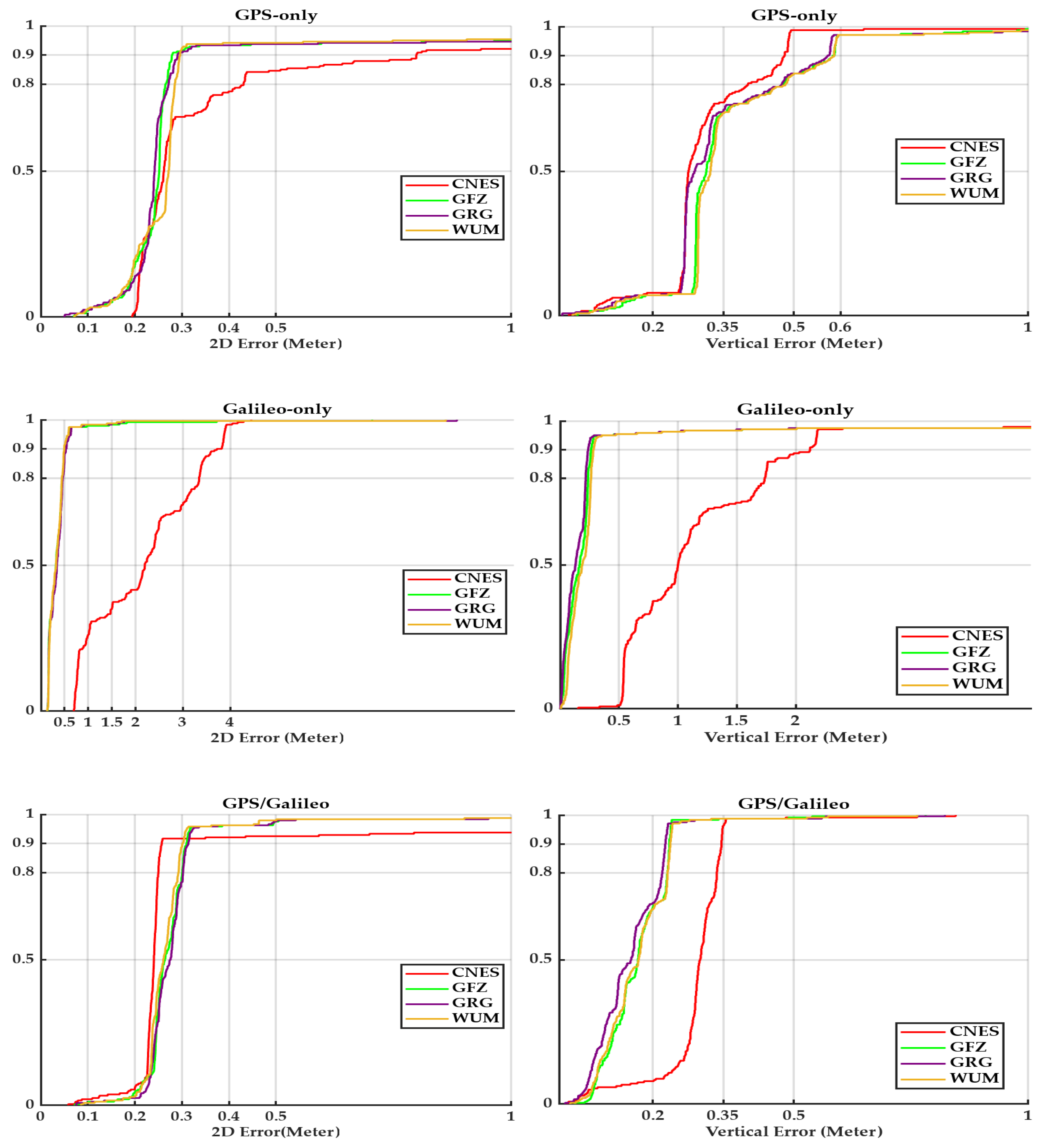
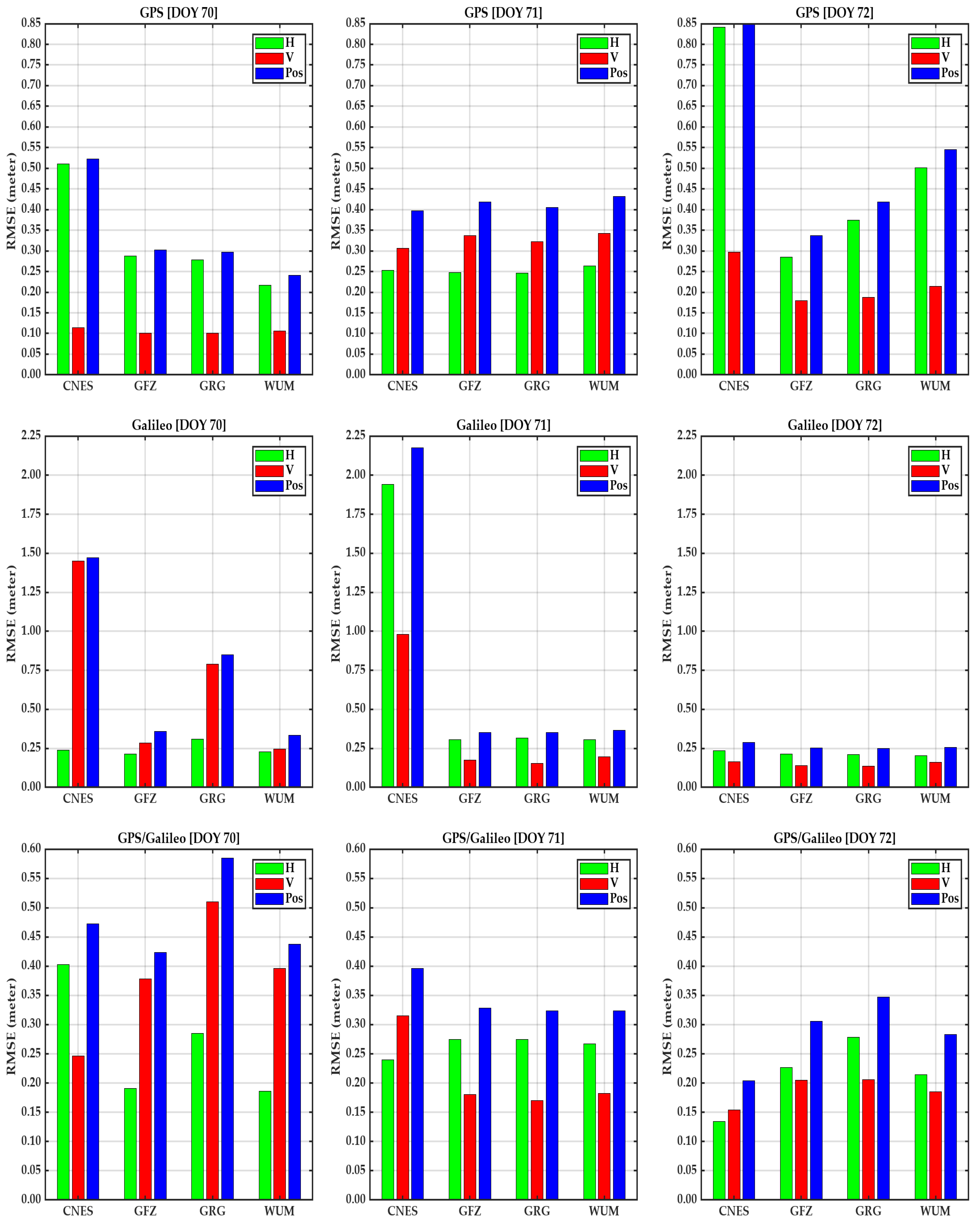
- For a GPS-only solution, less than 50 cm RMSE values in horizontal, vertical, and three-dimensional (3D) directions using CNES archived real-time products on DOY 70 and DOY 71. However, a notable degradation in positioning accuracy was observed, with RMSE values exceeding 50 cm in the horizontal and 3D component on DOY 72. The final WUM products demonstrated superior performance for the GPS-only solution, yielding RMSE values of approximately 22 cm, 11 cm, and 24 cm in the horizontal, vertical, and 3D directions, respectively.
- The Galileo-only solution exhibits higher RMSE values compared to the real-time GPS-only PPP solutions counterpart for DOY 70 and DOY 71. When employing the CNES real-time products, the Galileo-only solution achieved RMSE values close to 2 m across horizontal and 3D components on DOY 71, as well as vertical and position 3D components on DOY 70. A significant improvement in RMSE values in all components was observed on DOY 72 with 24 cm, 16 cm, and 29 cm in horizontal, vertical, and position 3D components, respectively. Using the final post-processing products, the Galileo-only solution yielded RMSE values of approximately less than 30 cm for all products. A notable degradation in positioning accuracy was observed across all components on DOY 70 using the GRG product. Among the evaluated final products, the GRG solution delivered the best performance on DOY 72, attaining RMSE values of 21 cm, 13 cm, and 29 cm in the horizontal, vertical, and position 3D components, respectively.
- The combined GPS/Galileo solution demonstrates more stable accuracy compared to single-constellation solutions. Using the real-time CNES products, it achieved RMSE values of approximately 50 cm for all directions. On DOY 72, the CNES solution achieved superior RMSE values of 13 cm, 15 cm, and 20 cm in horizontal, vertical, and 3D components, respectively. For the final products, the combined GPS/Galileo solution achieved RMSE values less than 50 cm in all directions, with the WUM products demonstrating superior performance, achieving 21 cm, 19 cm, and 28 cm in horizontal, vertical, and 3D components, respectively, on DOY 72. However, on DOY 70, the combined solution achieved RMSE values greater than 50 cm using GRG products in vertical and 3D components.
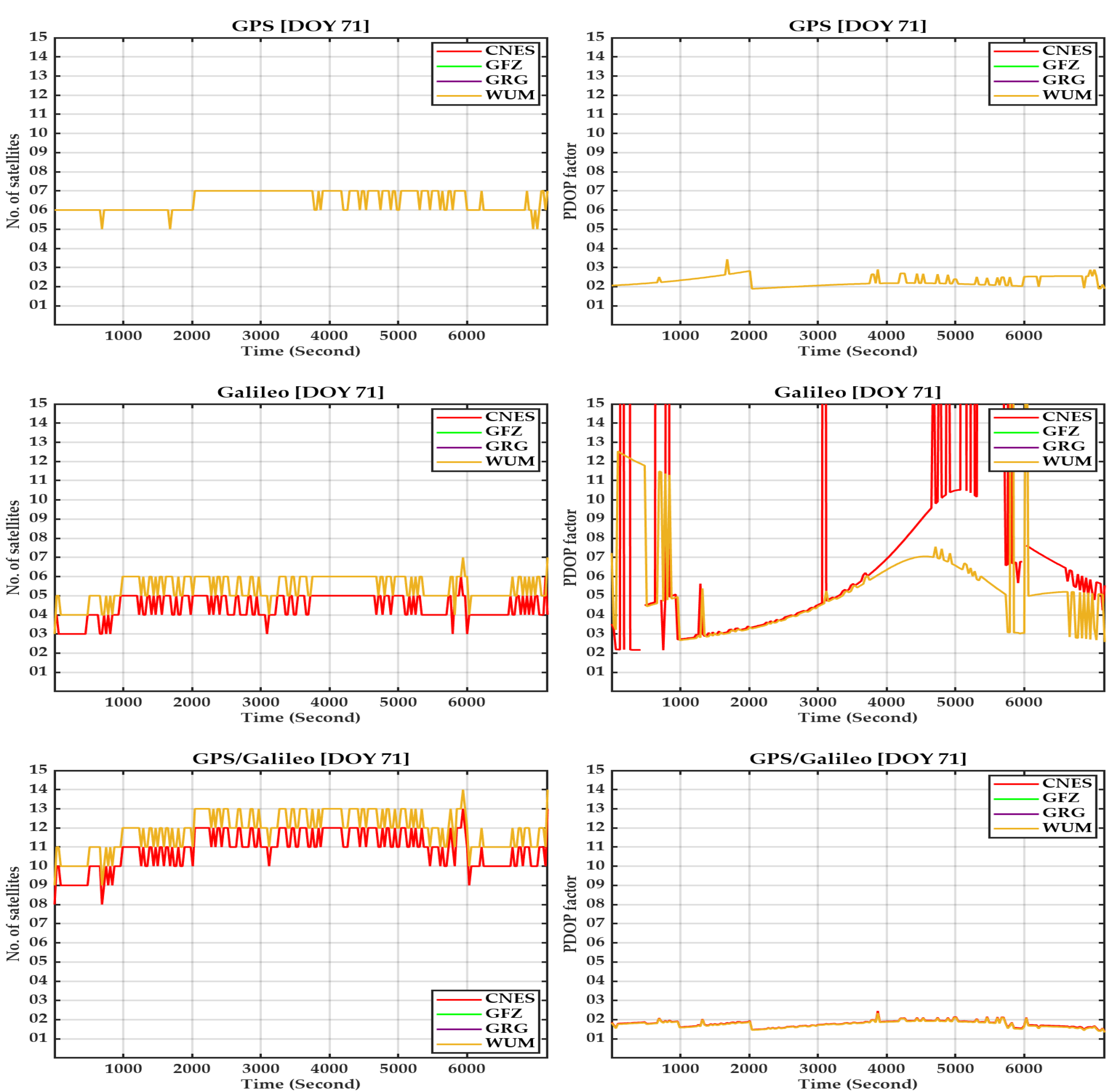
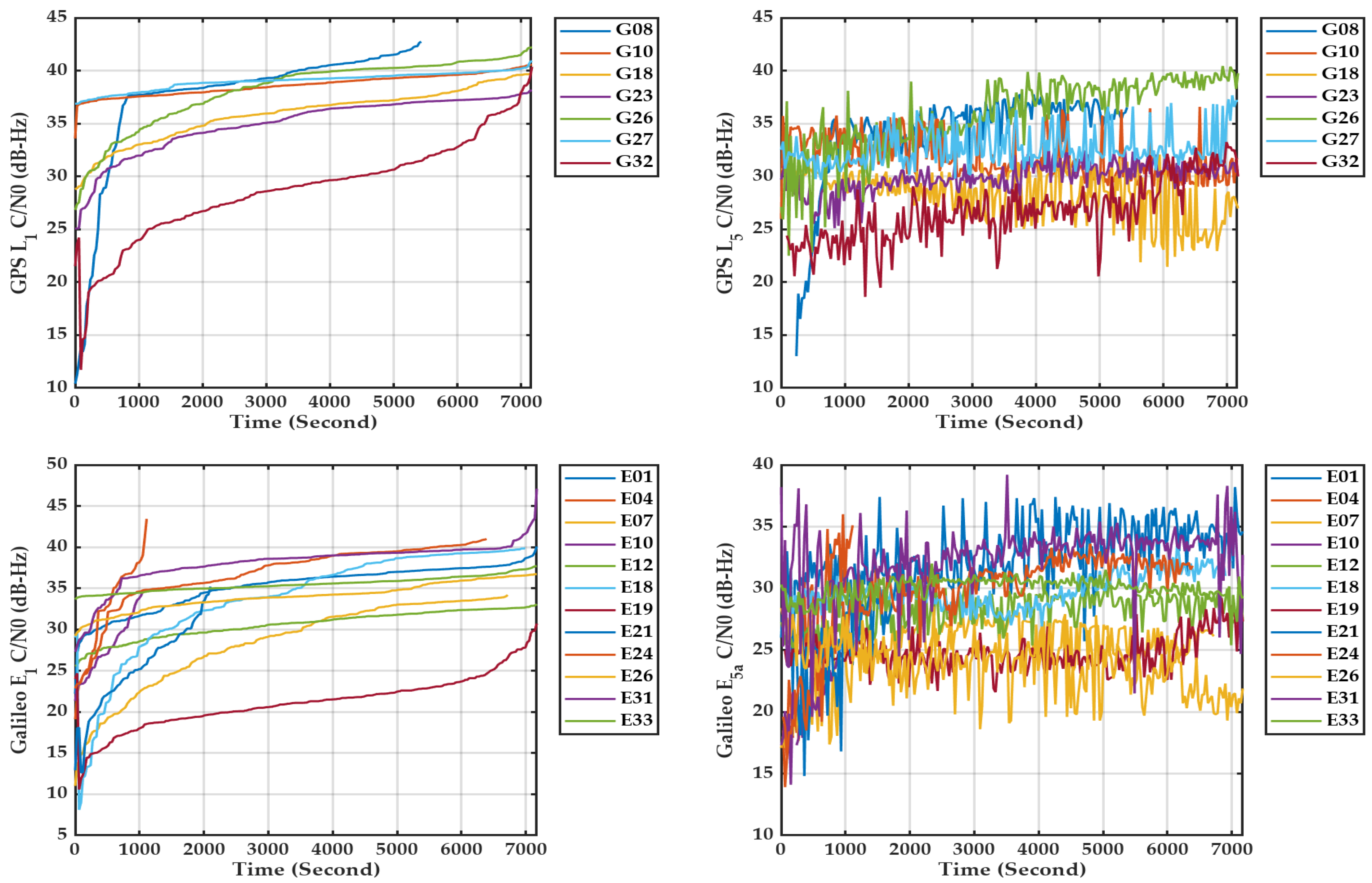
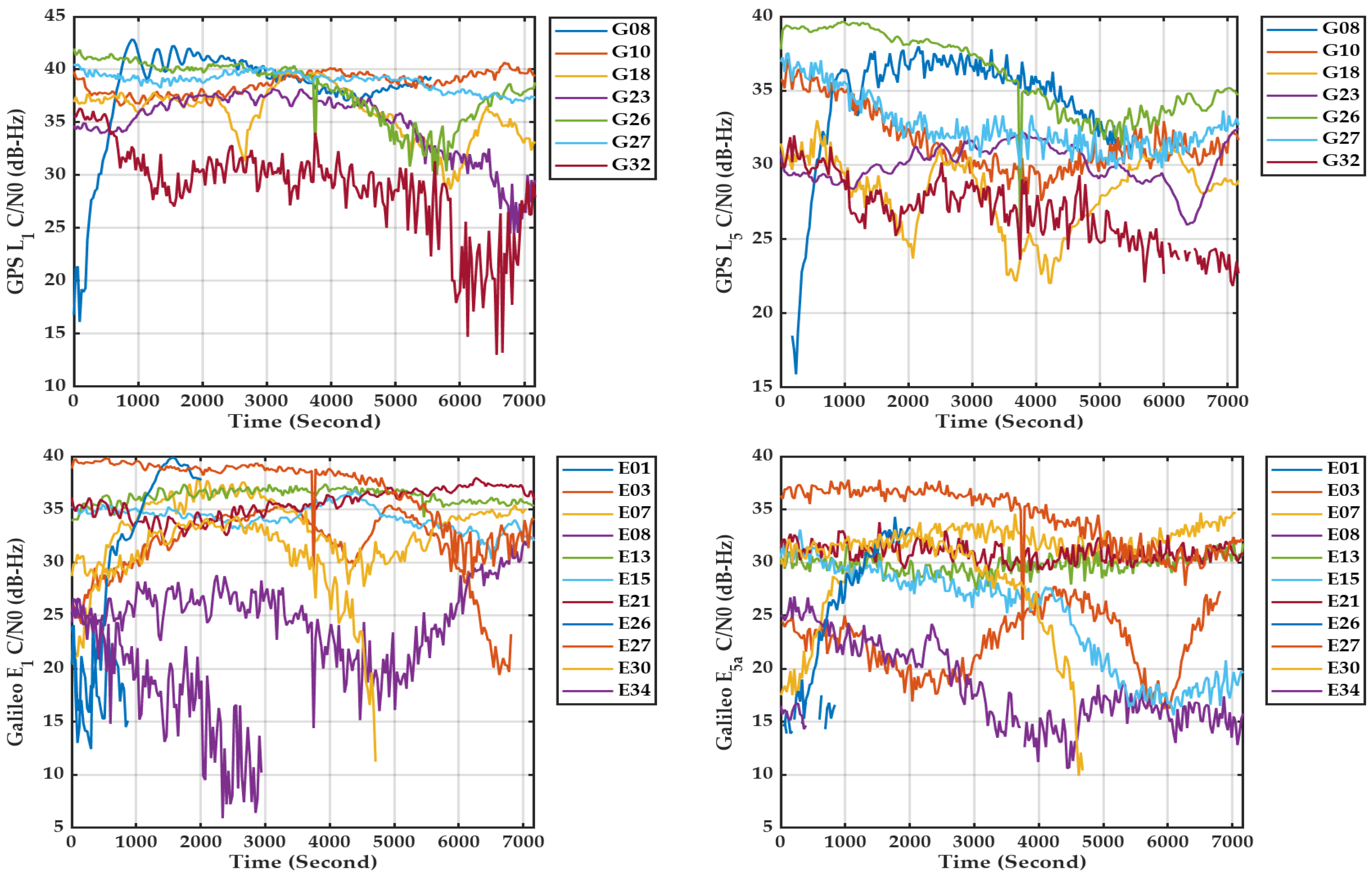
- Generally, ionosphere-free PPP solutions with smartphones can achieve less than 50 cm positioning 3D accuracy. Even with a notable degradation in RMSE values reaching 1 m level in real-time and close to 1 m using post-processing products. The observed degradation in PPP solutions can be attributed to poor signal strength, which results in data losses. These losses subsequently reduce the number of observable satellites and increase the PDOP, thereby adversely affecting positioning accuracy.
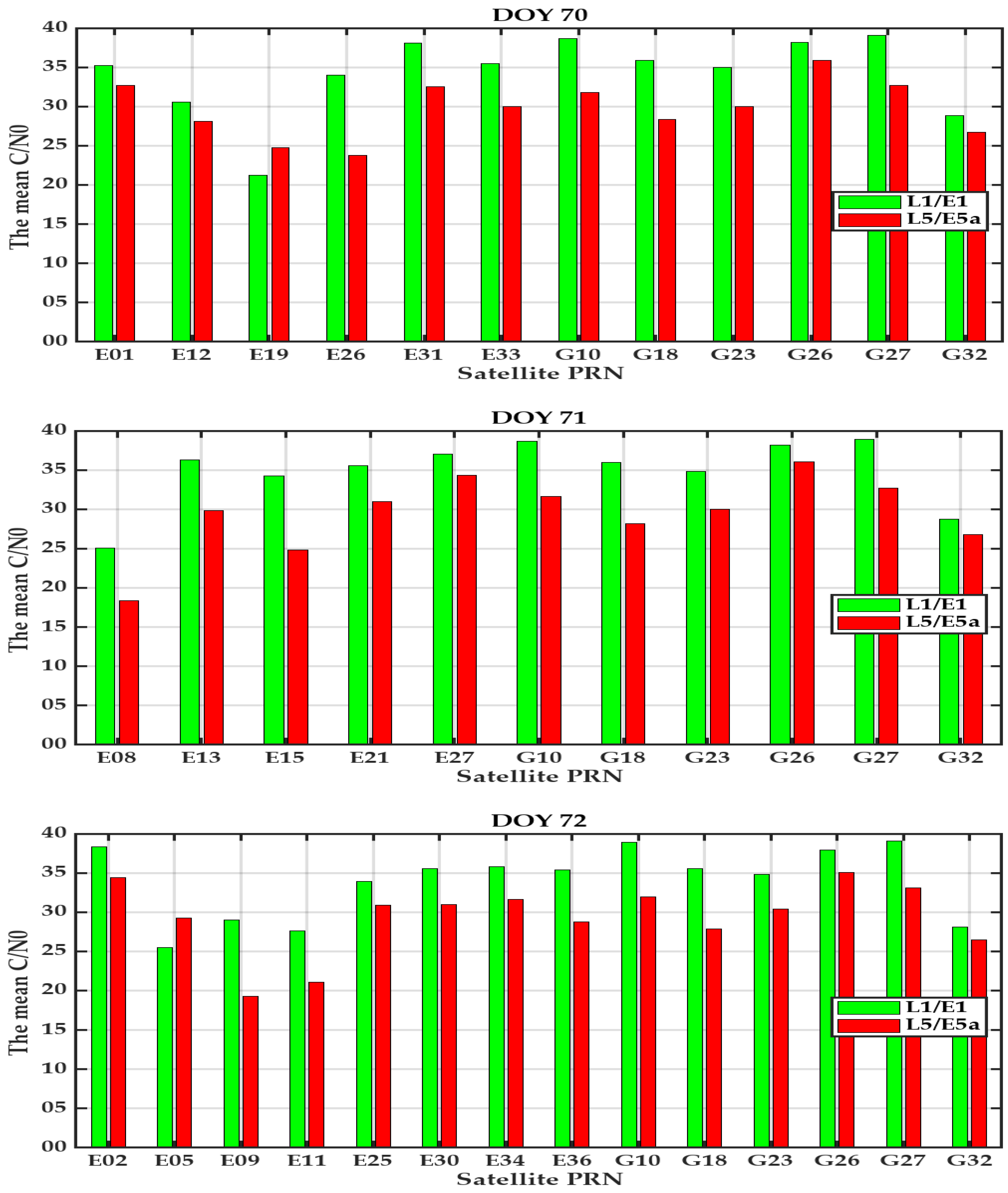
- Although the positioning accuracy using low-cost Xiaomi 11T modules is encouraging, it is subject to several limitations, including the necessity for pre-mission planning because Xiaomi 11T tracks only the L5 signal, which is currently transmitted by only 17 out of 32 GPS satellites. This constraint is particularly impactful for dual-frequency positioning. Additionally, the carrier phase measurement losses and comparatively lower signal strength relative to geodetic-grade receivers.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baybura, T.; Tiryakioğlu, İ.; Uğur, M.A.; Solak, H.İ.; Şafak, Ş. Examining the Accuracy of Network RTK and Long Base RTK Methods with Repetitive Measurements. J. Sens. 2019, 2019, 3572605. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Bisnath, S.; Gao, Y. Current State of Precise Point Positioning and Future Prospects and Limitations. In Observing Our Changing Earth; Springer: Berlin/Heidelberg, Germany, 2009; pp. 615–623. [Google Scholar]
- Wang, J.; Shi, C.; Zheng, F.; Yang, C.; Liu, X.; Liu, S.; Xia, M.; Jing, G.; Li, T.; Chen, W. Multi-Frequency Smartphone Positioning Performance Evaluation: Insights into A-GNSS PPP-B2b Services and Beyond. Satell. Navig. 2024, 5, 25. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and Reliability of Multi-GNSS Real-Time Precise Positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Hu, J.; Li, P.; Zhang, X.; Bisnath, S.; Pan, L. Precise Point Positioning with BDS-2 and BDS-3 Constellations: Ambiguity Resolution and Positioning Comparison. Adv. Space Res. 2022, 70, 1830–1846. [Google Scholar] [CrossRef]
- Tomaštík, J.; Chudá, J.; Tunák, D.; Chudý, F.; Kardoš, M. Advances in Smartphone Positioning in Forests: Dual-Frequency Receivers and Raw GNSS Data. For. Int. J. For. Res. 2021, 94, 292–310. [Google Scholar] [CrossRef]
- Rebischung, P.; Altamimi, Z.; Métivier, L.; Collilieux, X.; Gobron, K.; Chanard, K. Analysis of the IGS Contribution to ITRF2020. J. Geod. 2024, 98, 49. [Google Scholar] [CrossRef]
- Steigenberger, P.; Deng, Z.; Guo, J.; Prange, L.; Song, S.; Montenbruck, O. BeiDou-3 Orbit and Clock Quality of the IGS Multi-GNSS Pilot Project. Adv. Space Res. 2023, 71, 355–368. [Google Scholar] [CrossRef]
- Li, B.; Ge, H.; Bu, Y.; Zheng, Y.; Yuan, L. Comprehensive Assessment of Real-Time Precise Products from IGS Analysis Centers. Satell. Navig. 2022, 3, 12. [Google Scholar] [CrossRef]
- Liu, T.; Chen, H.; Chen, Q.; Jiang, W.; Laurichesse, D.; An, X.; Geng, T. Characteristics of Phase Bias from CNES and Its Application in Multi-Frequency and Multi-GNSS Precise Point Positioning with Ambiguity Resolution. GPS Solut. 2021, 25, 58. [Google Scholar] [CrossRef]
- Elshambaky, H.T. A Novel Approach to Enhancing the Klobuchar Algorithm to Mitigate the Effect of Ionospheric Delay Errors on Static Single-Frequency Receivers. J. Appl. Geod. 2023, 18, 21–42. [Google Scholar] [CrossRef]
- Setti Paulo, T.J.; da Silva, C.M.; Alves, D.B.M. Assessing GNSS Ionospheric Models at Low Latitudes: BDGIM, NeQuick-G, and Klobuchar. GPS Solut. 2025, 29, 15. [Google Scholar] [CrossRef]
- Ozdemir, B.N.; Alcay, S.; Ogutcu, S.; Pekgor, A.; Seemala, G.K.; Oztan, G. GRIMS: Global and Regional Ionosphere Monitoring System. GPS Solut. 2024, 28, 154. [Google Scholar] [CrossRef]
- Zhao, L.; Blunt, P.; Yang, L.; Zhang, Q.; Li, G.; Wen, Q. Tight Integration of Real-Time GNSS PPP and INS: Ionosphere-Free Combined vs Uncombined Models. Adv. Space Res. 2024, 74, 5417–5427. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS Precise Point Positioning with Raw Single-Frequency and Dual-Frequency Measurement Models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Zangenehnejad, F.; Gao, Y. GNSS Smartphones Positioning: Advances, Challenges, Opportunities, and Future Perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef]
- Robustelli, U.; Paziewski, J.; Pugliano, G. Observation Quality Assessment and Performance of GNSS Standalone Positioning with Code Pseudoranges of Dual-Frequency Android Smartphones. Sensors 2021, 21, 2125. [Google Scholar] [CrossRef]
- Aggrey, J.; Bisnath, S.; Naciri, N.; Shinghal, G.; Yang, S. Multi-GNSS Precise Point Positioning with next-Generation Smartphone Measurements. J. Spat. Sci. 2020, 65, 79–98. [Google Scholar] [CrossRef]
- Yong, C.; Odolinski, R.; Zaminpardaz, S.; Moore, M.; Rubinov, E.; Er, J.; Denham, M. Instantaneous, Dual-Frequency, Multi-Gnss Precise Rtk Positioning Using Google Pixel 4 and Samsung Galaxy S20 Smartphones for Zero and Short Baselines. Sensors 2021, 21, 8318. [Google Scholar] [CrossRef]
- Wang, G.; Bo, Y.; Yu, Q.; Li, M.; Yin, Z.; Chen, Y. Ionosphere-Constrained Single-Frequency Ppp with an Android Smartphone and Assessment of Gnss Observations. Sensors 2020, 20, 5917. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Wang, N.; Li, R.; Liu, A. Real-Time GNSS Precise Point Positioning with Smartphones for Vehicle Navigation. Satell. Navig. 2022, 3, 19. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality Analysis of Multi-GNSS Raw Observations and a Velocity-Aided Positioning Approach Based on Smartphones. Adv. Space Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Banville, S.; Lachapelle, G.; Ghoddousi-Fard, R.; Gratton, P. Automated Processing of Low-Cost GNSS Receiver Data. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS+ 2019, Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Signal Characterization and Assessment of Code GNSS Positioning with Low-Power Consumption Smartphones. GPS Solut. 2019, 23, 98. [Google Scholar] [CrossRef]
- Shinghal, G.; Bisnath, S. Conditioning and PPP Processing of Smartphone GNSS Measurements in Realistic Environments. Satell. Navig. 2021, 2, 10. [Google Scholar] [CrossRef]
- Xiaomi 11T—Full Phone Specifications. Available online: https://www.gsmarena.com/xiaomi_11t-11099.php (accessed on 17 May 2025).
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise Positioning with Current Multi-Constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Geo++ RINEX Logger—Apps on Google Play. Available online: https://play.google.com/store/apps/details?id=de.geopp.rinexlogger&hl=en_US (accessed on 26 June 2024).
- Precise Point Positioning. Available online: https://webapp.csrs-scrs.nrcan-rncan.gc.ca/geod/tools-outils/ppp.php (accessed on 18 May 2025).
- Ozdemir, B.N. RINEX SCAN: Open-Source RINEX Epoch and Frequency Scanning Software. Earth Sci. Inform. 2025, 18, 290. [Google Scholar] [CrossRef]
- Zhang, Y.; Kubo, N.; Chen, J.; Wang, J.; Wang, H. Initial Positioning Assessment of BDS New Satellites and New Signals. Remote Sens. 2019, 11, 1320. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, J.; Gong, X.; Chen, Q. The Update of BDS-2 TGD and Its Impact on Positioning. Adv. Space Res. 2020, 65, 2645–2661. [Google Scholar] [CrossRef]
- GPS.Gov: Space Segment. Available online: https://www.gps.gov/systems/gps/space/ (accessed on 17 May 2025).
- Trimble GNSS Planning. Available online: https://www.gnssplanning.com/#/settings (accessed on 9 March 2023).
- The PPP-Wizard Project. Available online: http://www.ppp-wizard.net/ (accessed on 17 May 2025).
- CDDIS|Data and Derived Products|GNSS|GNSS Data and Product Archive. Available online: https://cddis.nasa.gov/Data_and_Derived_Products/GNSS/GNSS_data_and_product_archive.html (accessed on 17 May 2025).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Frequency | Observations | |||
|---|---|---|---|---|---|
| Code | Carrier | Doppler | Signal Strength | ||
| GPS | L1 | C1C | L1C | D1C | S1C |
| L5 | C5Q | L5Q | D5Q | S5Q | |
| Galileo | E1 | C1C | L1C | D1C | S1C |
| E5a | C5Q | L5Q | D5Q | S5Q | |
| PRN | C1C % | L1C % | C5Q % | L5Q % | PRN | C1C % | L1C % | C5Q % | L5Q % |
|---|---|---|---|---|---|---|---|---|---|
| G32 | 100 | 98.6 | 100 | 100 | E34 | 100 | 99.9 | 100 | 18.7 |
| G27 | 100 | 100 | 100 | 100 | E30 | 100 | 99.6 | 100 | 99.4 |
| G26 | 100 | 100 | 100 | 100 | E27 | 100 | 100 | 100 | 100 |
| G23 | 100 | 100 | 100 | 100 | E26 | 100 | 98.9 | 100 | 95.5 |
| G18 | 100 | 100 | 100 | 100 | E21 | 100 | 100 | 100 | 100 |
| G10 | 100 | 100 | 100 | 100 | E15 | 100 | 100 | 100 | 100 |
| G08 | 100 | 99.6 | 100 | 97.3 | E13 | 100 | 100 | 100 | 100 |
| E03 | 100 | 99.7 | 100 | 99.9 | E08 | 100 | 99.9 | 100 | 99.9 |
| E01 | 100 | 71.8 | 100 | 87.5 | E07 | 100 | 100 | 100 | 99.9 |
| Parameter | Solution | |
|---|---|---|
| Real-Time | Final | |
| Ephemeris and Clock | CNES | GFZ–GRG–WUM |
| Ionosphere | Ionosphere free Combination | |
| Troposphere | Saastamoinen | |
| Systems | GPS–Galileo–The combined GPS/Galileo | |
| Frequencies | GPS: L1L5–Galileo: E1E5a | |
| Observation Type | Code measurements + Carrier phase measurements | |
| Interval | 30 s | |
| Elevation | 5° | |
| Ambiguity | FLOAT | |
| Stochastic model | ELE1 + C/N0 | |
| Estimation parameter | Kalman Filter | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelazeem, M.; Kamal, H.A.; Abazeed, A.; Wahaballa, A.M. An Evaluation of Static Affordable Smartphone Positioning Performance Leveraging GPS/Galileo Measurements with Instantaneous CNES and Final IGS Products. Geomatics 2025, 5, 28. https://doi.org/10.3390/geomatics5030028
Abdelazeem M, Kamal HA, Abazeed A, Wahaballa AM. An Evaluation of Static Affordable Smartphone Positioning Performance Leveraging GPS/Galileo Measurements with Instantaneous CNES and Final IGS Products. Geomatics. 2025; 5(3):28. https://doi.org/10.3390/geomatics5030028
Chicago/Turabian StyleAbdelazeem, Mohamed, Hussain A. Kamal, Amgad Abazeed, and Amr M. Wahaballa. 2025. "An Evaluation of Static Affordable Smartphone Positioning Performance Leveraging GPS/Galileo Measurements with Instantaneous CNES and Final IGS Products" Geomatics 5, no. 3: 28. https://doi.org/10.3390/geomatics5030028
APA StyleAbdelazeem, M., Kamal, H. A., Abazeed, A., & Wahaballa, A. M. (2025). An Evaluation of Static Affordable Smartphone Positioning Performance Leveraging GPS/Galileo Measurements with Instantaneous CNES and Final IGS Products. Geomatics, 5(3), 28. https://doi.org/10.3390/geomatics5030028