
Geovisualization of Hydrological Flow in Hexagonal Grid Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Terrain Data Quantization
3. Hydrological Operations
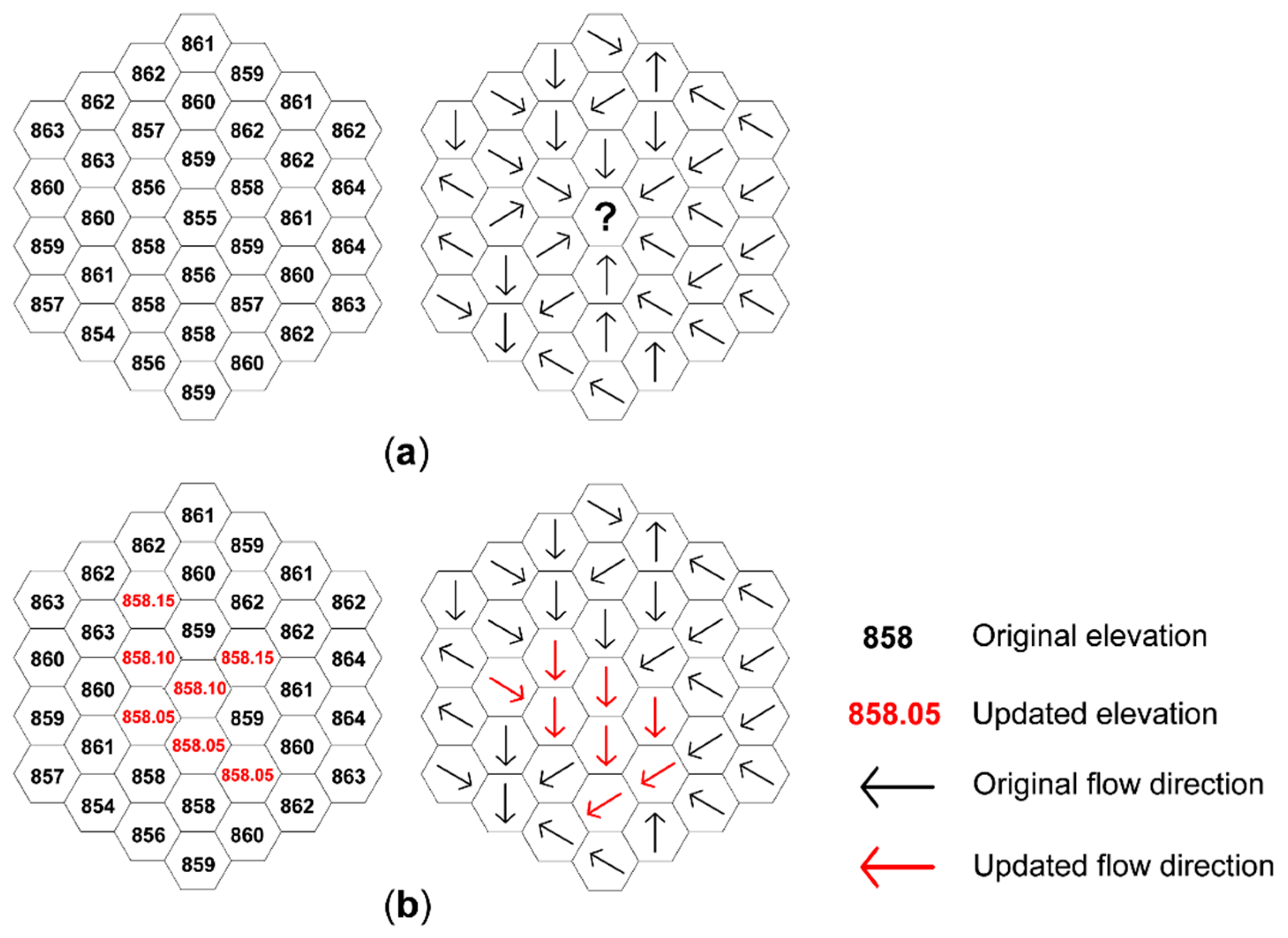
3.1. Pit Filling and Flat Removal
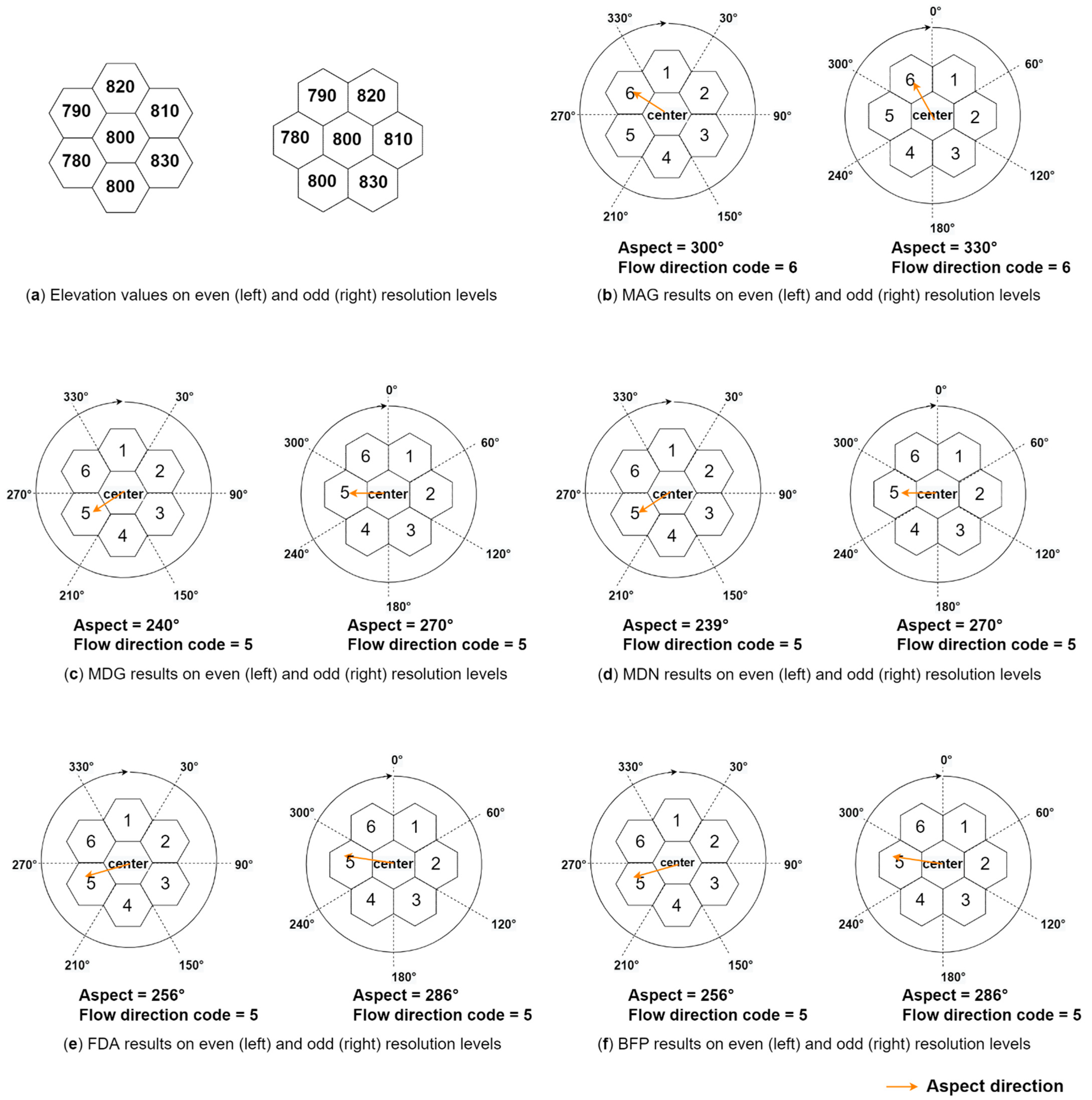
3.2. Flow Direction
- Populate all cells with their flow directions according to one of four methods: MAG, MDN, FDA, and BFP.
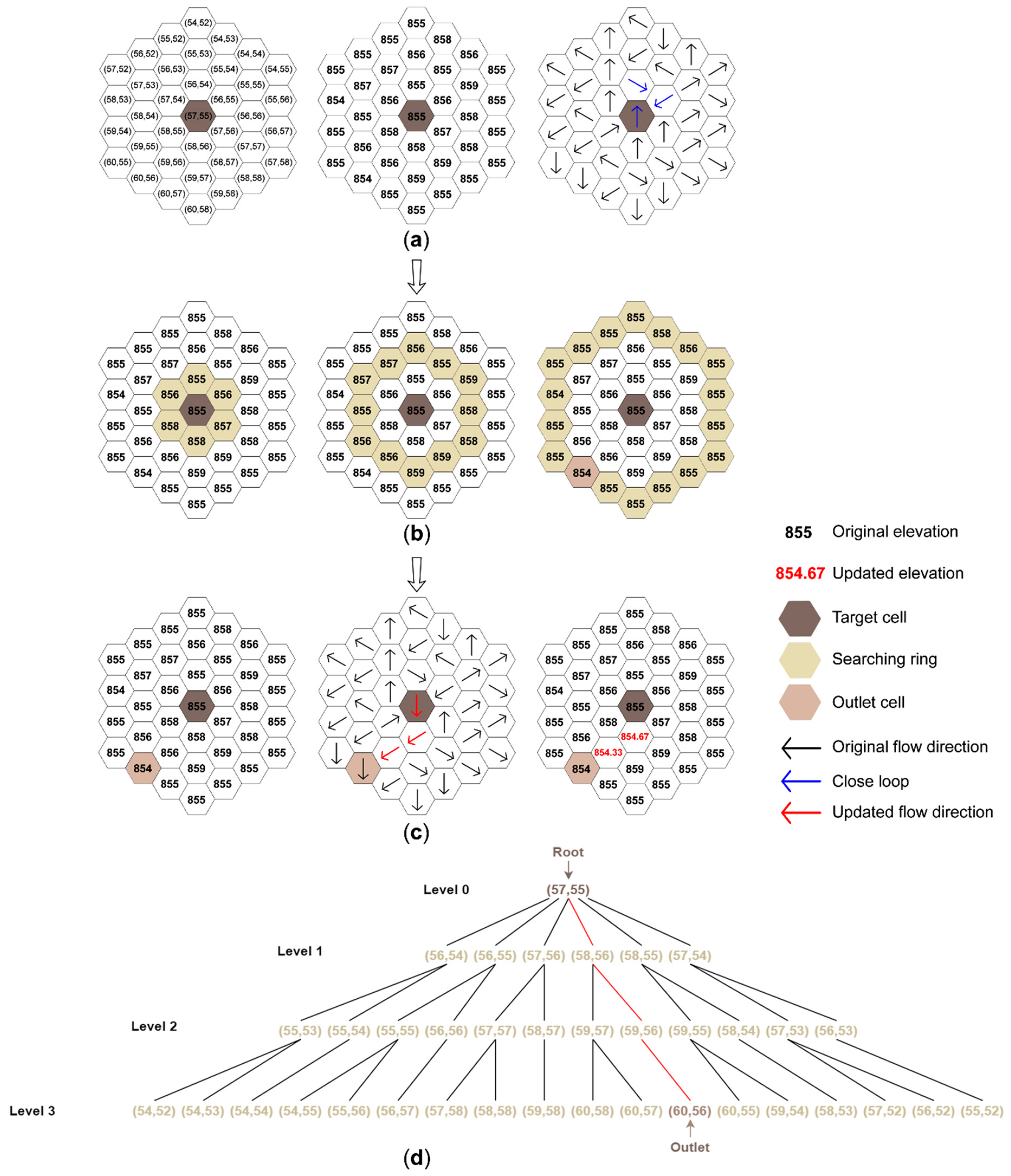
- Scan all cells following their existing flow directions and record all close loops in a list.
- Find out the lowest cell in each of the close loops, which is defined as the ‘head’ of the loop. Sort the close loops ascendingly by elevations of their ‘head’ cells.
- Construct a ‘tree’ for the ‘head’ cell in the first close loop by viewing this cell as the tree root.
- Deepen the tree by one level by adding the first-ring neighbors as the leaf nodes clockwise from north. Extend each of the leaf nodes by adding their first-ring neighbors as the new leaf nodes clockwise from the north. Duplicated leaf nodes are removed after all neighbors are added. At this point, the tree is deepened to three levels having all of its second-ring neighbors as the new leaf nodes.
- Continuously deepen the tree until the first candidate outlet is found, where an outlet is defined as an edge cell or a cell with a lower elevation than the tree root. Examine if the candidate outlet flows back to the target ‘head’ cell. If it does, continue to enlarge the search ring until a legit outlet is found.
- Trace the path from the root cell to the outlet cell and update the flow directions and elevations along the tracing path. New elevations of cells forming the tracing path are an arithmetic sequence with elevations of the root cell and the outlet cell as the first and last term.
- Remove the broken close loop from the list. If the tracing path passes any cell in any unbroken close loop, remove this close loop from the list as well.
- Repeat Steps 4–8 until all close loops in the list are broken sequentially.
3.3. Flow Accumulation
- Initialize the inflow count as 0 and upslope count as 1 for all cells.
- Iterate the cells and determine the inflow count with reference to the existing flow directions for each cell. In other words, the number of cells whose flow direction points to the center cell is saved as the inflow count for the center cell, ranging from 0 to 6.
- Scan all cells and identify those whose inflow count is 0. For each of the zero-cells, determine which neighboring cell the zero-cell flows into and increase this neighboring cell’s upslope count by the zero-cell’s upslope count.
- If this neighboring cell’s inflow count is negative and it is not an edge cell, then reset it to 0 and decrease the zero-cell’s inflow count by 1; if not, decrease the inflow count for all cells involved by 1.
- Repeat Steps 3 and 4 until the inflow count for all cells are negative.
- The flow accumulation is then calculated as the upslope count multiplying by the cell area.
3.4. Watersheds above Outlets
3.5. Hydrological Indices
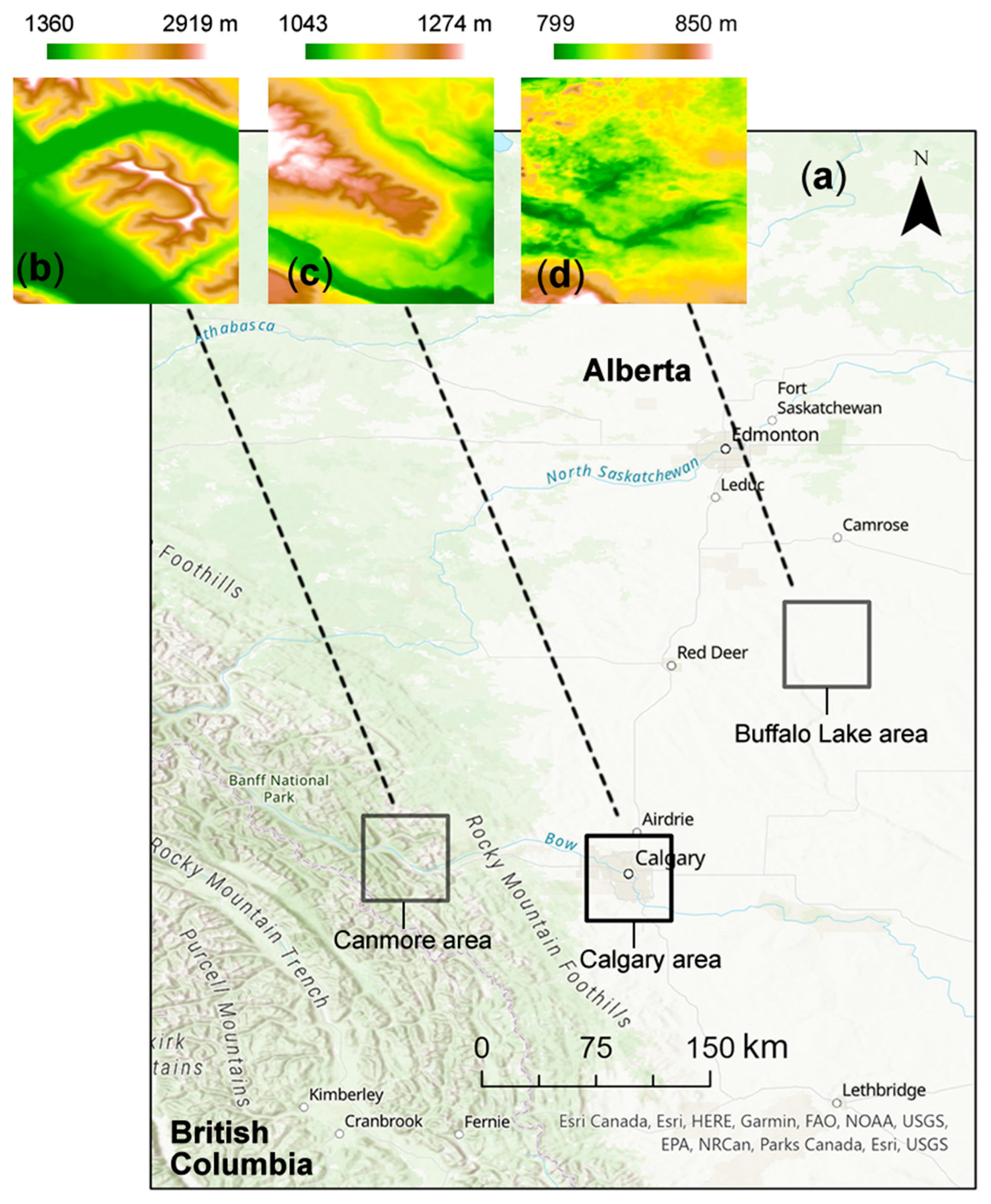
4. Study Area and Experimental Environment
5. Results
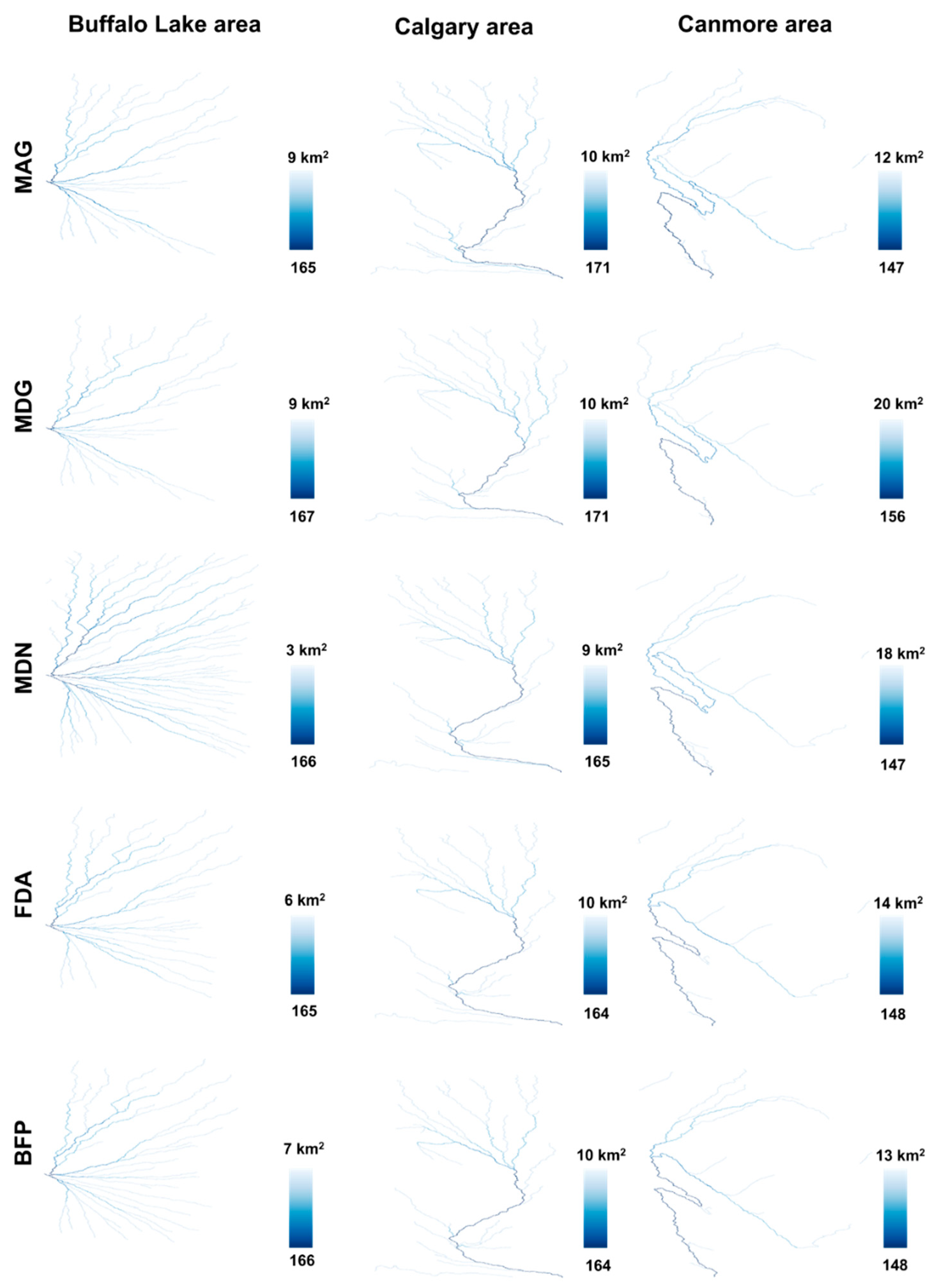
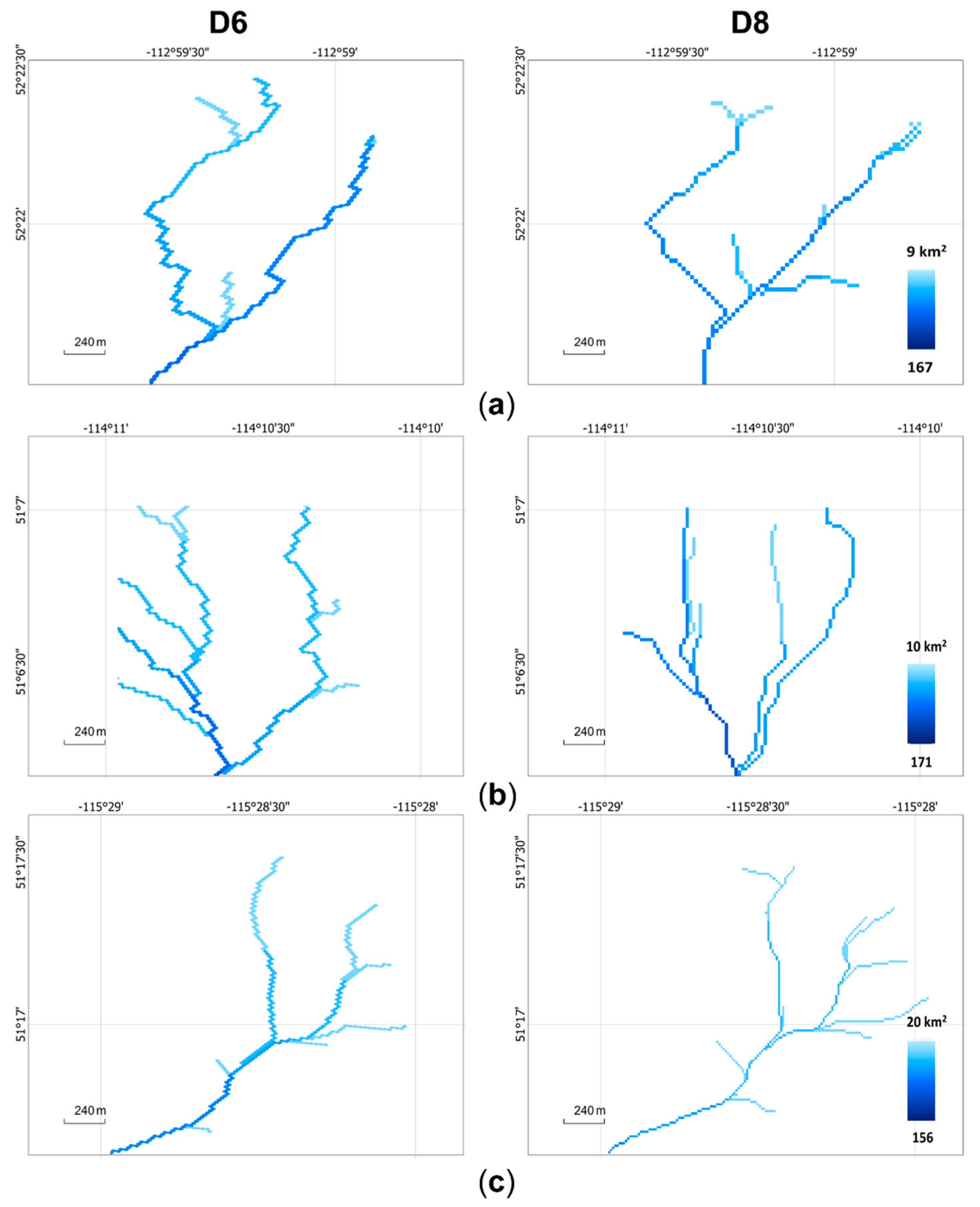
5.1. Flow Accumulation
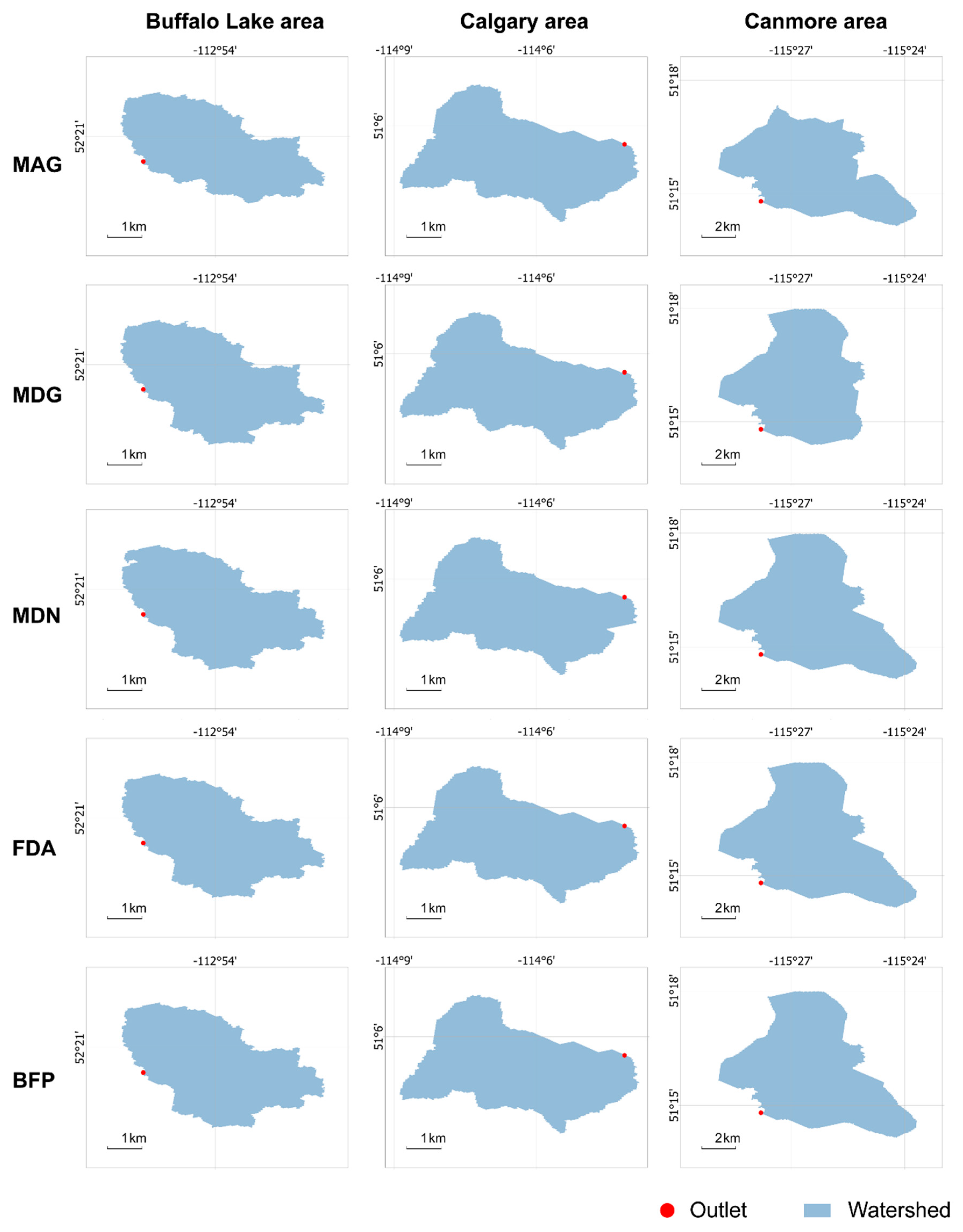
5.2. Watershed Delineation
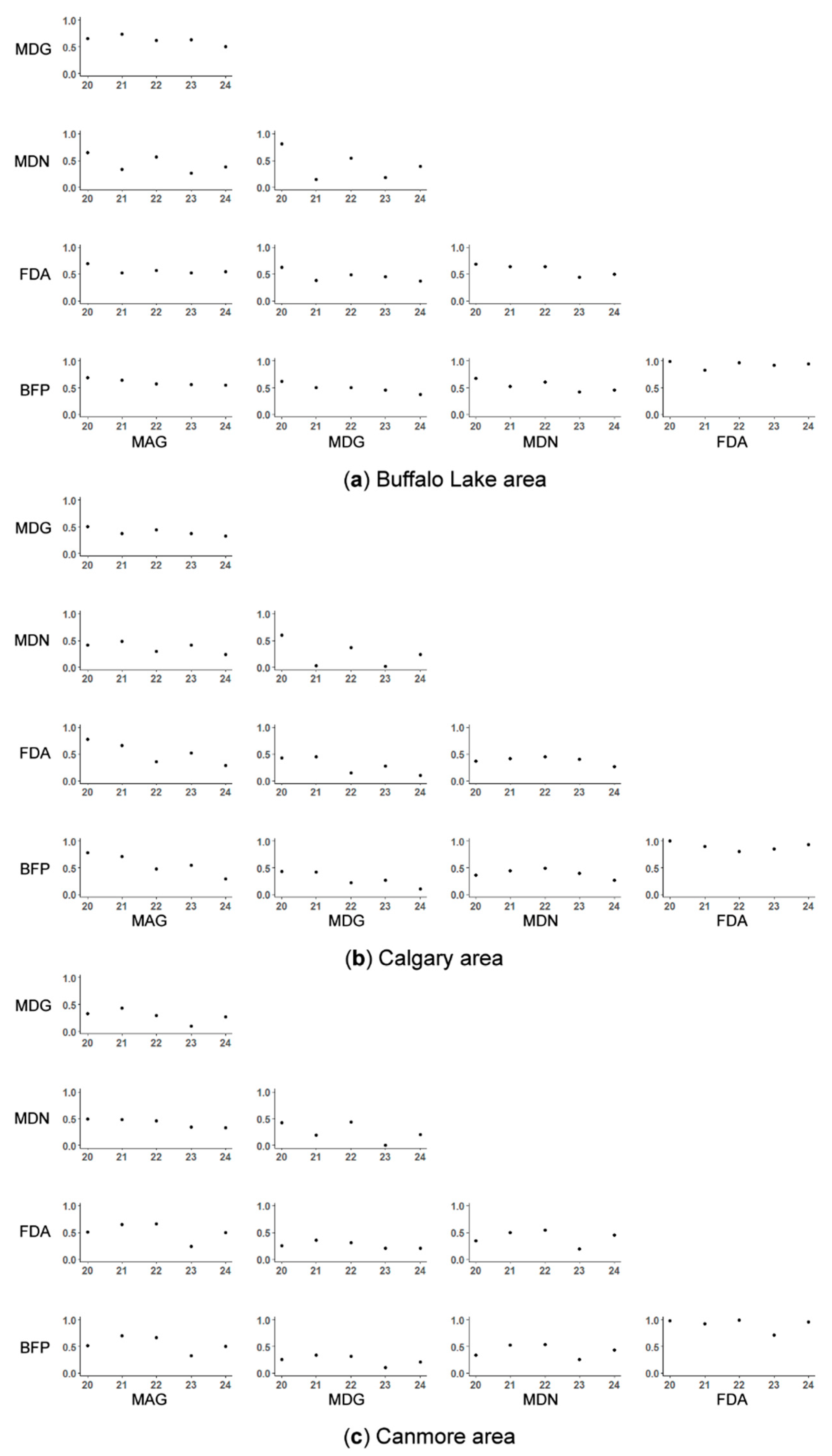
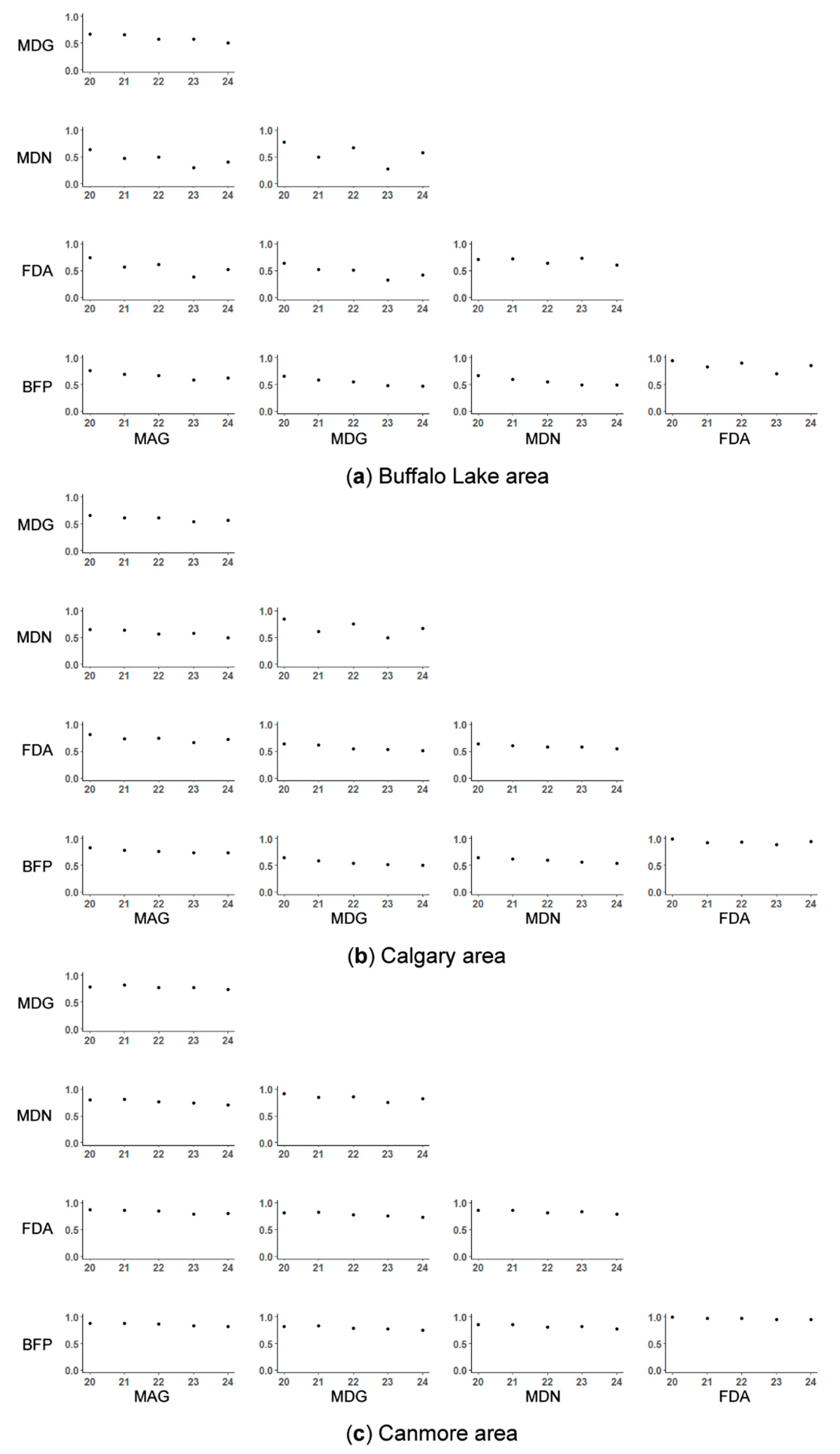
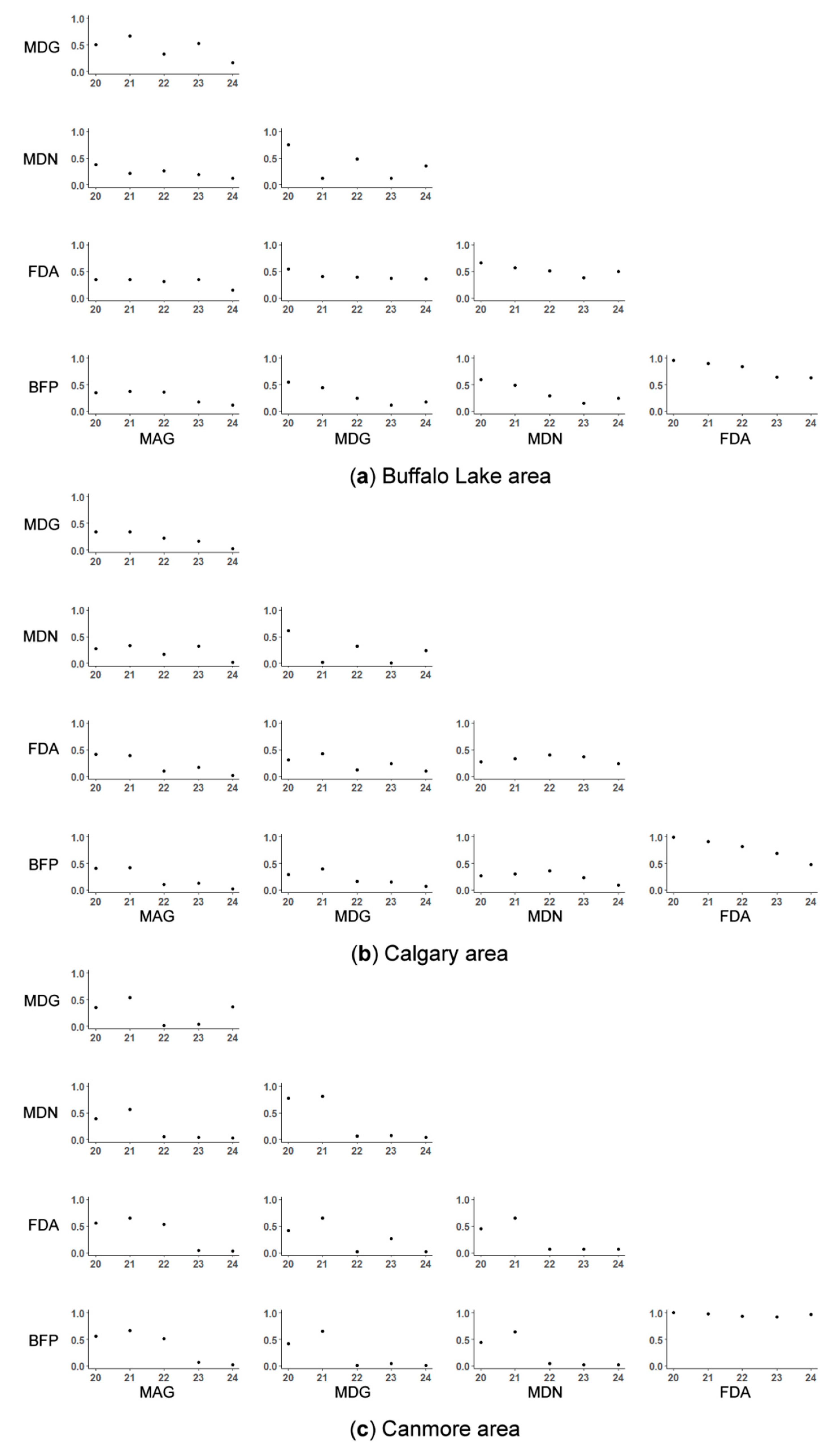
5.3. Hydrological Indices
6. Discussion
6.1. Comparison between Flow Routing Methods
6.2. Geovisualization in Hexagonal Discrete Global Grids
6.3. Study Impact and Future Work
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johnston, C.M.; Dewald, T.G.; Bondelid, T.R.; Worstell, B.B.; McKay, L.D.; Rea, A.; Moore, R.B.; Goodall, J.L. Evaluation of Catchment Delineation Methods for the Medium-Resolution National Hydrography Dataset; Scientific Investigations Report 2009–5233; U.S. Department of the Interior, U.S. Geological Survey: Reston, VA, USA, 2009.
- Liao, C.; Tesfa, T.; Duan, Z.; Leung, L.R. Watershed delineation on a hexagonal mesh grid. Environ. Model. Softw. 2020, 128, 104702. [Google Scholar] [CrossRef]
- Gallant, J.C.; Hutchinson, M.F. A differential equation for specific catchment area. Water Resour. Res. 2011, 47, W05535. [Google Scholar] [CrossRef] [Green Version]
- Wright, J.W. Regular Hierarchical Surface Models: A Conceptual Model of Scale Variation in a GIS and its Application to Hydrological Geomorphometry. Ph.D. Thesis, University of Otago, Dunedin, Otago, New Zealand, August 2017. [Google Scholar]
- Liao, C.; Zhou, T.; Xu, D.; Barnes, R.; Bisht, G.; Li, H.Y.; Tan, Z.; Tesfa, T.; Duan, Z.; Engwirda, D.; et al. Advances in hexagon mesh-based flow direction modeling. Adv. Water Resour. 2022, 160, 104099. [Google Scholar] [CrossRef]
- Wang, L.; Ai, T.; Shen, Y.; Li, J. The isotropic organization of DEM structure and extraction of valley lines using hexagonal grid. Trans. GIS 2020, 24, 483–507. [Google Scholar] [CrossRef]
- Alderson, T.; Purss, M.; Du, X.; Mahdavi-Amiri, A.; Samavati, F. Digital Earth Platforms. In Manual of Digital Earth; Guo, H., Goodchild, M., Annoni, A., Eds.; Springer: Singapore, 2020; pp. 25–54. [Google Scholar]
- Hojati, M.; Robertson, C. Integrating Cellular Automata and Discrete Global Grid Systems: A Case Study into Wildfire Modelling. In Proceedings of the 23rd AGILE Conference on Geographic Information Science, Chania, Greece, 16–19 June 2020. [Google Scholar] [CrossRef]
- Li, M.; McGrath, H.; Stefanakis, E. Integration of heterogeneous terrain data into Discrete Global Grid Systems. Cartogr. Geogr. Inf. Sci. 2021, 48, 546–564. [Google Scholar] [CrossRef]
- Chaudhuri, C.; Gray, A.; Robertson, C. InundatEd-v1.0: A height above nearest drainage (HAND)-based flood risk modeling system using a discrete global grid system. Geosci. Model Dev. 2021, 14, 3295–3315. [Google Scholar] [CrossRef]
- Robertson, C.; Chaudhuri, C.; Hojati, M.; Roberts, S.A. An integrated environmental analytics system (IDEAS) based on a DGGS. ISPRS J. Photogramm. Remote Sens. 2020, 162, 214–228. [Google Scholar] [CrossRef]
- Barnes, R.; Sahr, K.; Evenden, G.; Johnson, A.; Warmerdam, F. dggridR: Discrete Global Grids for R. R Package Version 2.0.4. Available online: https://github.com/r-barnes/dggridR (accessed on 5 March 2020).
- Shannon, C.E. Communication in the Presence of Noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Sahr, K. Location coding on icosahedral aperture 3 hexagon discrete global grids. Comput. Environ. Urban Syst. 2008, 32, 174–187. [Google Scholar] [CrossRef]
- Tarboton, D.G. A new method for the determination of flow directions and upslope areas in grid digital elevation models. Water Resour. Res. 1997, 33, 309–319. [Google Scholar] [CrossRef] [Green Version]
- Jones, R. Algorithms for using a DEM for mapping catchment areas of stream sediment samples. Comput. Geosci. 2002, 28, 1051–1060. [Google Scholar] [CrossRef]
- Kenny, F.; Matthews, B.; Todd, K. Routing overland flow through sinks and flats in interpolated raster terrain surfaces. Comput. Geosci. 2008, 34, 1417–1430. [Google Scholar] [CrossRef]
- Barnes, R.; Lehman, C.; Mulla, D. Priority-flood: An optimal depression-filling and watershed-labeling algorithm for digital elevation models. Comput. Geosci. 2014, 62, 117–127. [Google Scholar] [CrossRef] [Green Version]
- Wright, J.W.; Moore, A.B.; Leonard, G.H. Flow direction algorithms in a hierarchical hexagonal surface model. J. Spat. Sci. 2014, 59, 333–346. [Google Scholar] [CrossRef] [Green Version]
- Travis, M.R. VIEWIT: Computation of Seen Areas, Slope, and Aspect for Land-Use Planning; Department of Agriculture, Forest Service, Pacific Southwest Forest and Range Experiment Station: Albany, CA, USA, 1975; p. 70, Rep. PSW 11.
- Shanholtz, V.O.; Desai, C.J.; Zhang, N.; Kleene, J.W.; Metz, C.D.; Flagg, J.M. Hydrologic/water quality modeling in a GIS environment. ASAE 1990, 90, 3033. [Google Scholar]
- Skidmore, A.K. A comparison of techniques for calculating gradient and aspect from a gridded digital elevation model. Int. J. Geogr. Inf. Syst. 1989, 3, 323–334. [Google Scholar] [CrossRef]
- Hodgson, M.E. Comparison of angles from surface slope/aspect algorithms. Cartogr. Geogr. Inf. Syst. 1998, 25, 173–185. [Google Scholar] [CrossRef]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital terrain modelling: A review of hydrological, geomorphological, and biological applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Freeman, T.G. Calculating catchment area with divergent flow based on a regular grid. Comput. Geosci. 1991, 17, 413–422. [Google Scholar] [CrossRef]
- Raaflaub, L.D.; Collins, M.J. The effect of error in gridded digital elevation models on the estimation of topographic parameters. Environ. Model. Softw. 2006, 21, 710–732. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology/Un modèle à base physique de zone d’appel variable de l’hydrologie du bassin versant. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef] [Green Version]
- NRCan. Canadian Digital Elevation Model, 1945–2011. Available online: https://ftp.maps.canada.ca/pub/nrcan_rncan/elevation/cdem_mnec/ (accessed on 4 August 2021).
- HEC. Hydrologic Modeling System v.4.9.0. Available online: https://www.hec.usace.army.mil/software/hec-hms/default.aspx (accessed on 5 April 2022).
- Wang, L.; Liu, H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Li, M.; Stefanakis, E. Geospatial operations of discrete global grid systems—A comparison with traditional GIS. J. Geovis. Spat. Anal. 2020, 4, 26. [Google Scholar] [CrossRef]
- Leaflet. Leaflet: An Open-Source JavaScript Library for Mobile-Friendly Interactive Maps. Available online: https://leafletjs.com/ (accessed on 10 March 2020).
- OpenEAGGR. Open Equal Area Global GRid. Available online: https://github.com/riskaware-ltd/open-eaggr (accessed on 26 November 2019).
- PostgreSQL. PostgreSQL: The World’s Most Advanced Open Source Relational Database. Available online: https://www.postgresql.org/ (accessed on 1 April 2022).
- Hojati, M.; Robertson, C.; Roberts, S.; Chaudhuri, C. GIScience research challenges for realizing discrete global grid systems as a Digital Earth. Big Earth Data 2022, 1–22, ahead-of-print. [Google Scholar] [CrossRef]
- Tehrany, M.S.; Jones, S.; Shabani, F. Identifying the essential flood conditioning factors for flood prone area mapping using machine learning techniques. Catena 2019, 175, 174–192. [Google Scholar] [CrossRef]
- Esfandiari, M.; Jabari, S.; McGrath, H.; Coleman, D. Flood mapping using random forest and identifying the essential conditioning factors: A case study in Fredericton, New Brunswick, Canada. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, V-3-2020, 609–615. [Google Scholar] [CrossRef]
- McGrath, H.; Gohl, P.N. Accessing the impact of meteorological variables on machine learning flood susceptibility mapping. Remote Sens. 2022, 14, 1656. [Google Scholar] [CrossRef]
- Barnes, R. Parallel Priority-Flood depression filling for trillion cell digital elevation models on desktops or clusters. Comput. Geosci. 2016, 96, 56–68. [Google Scholar] [CrossRef] [Green Version]
- Barnes, R. Parallel non-divergent flow accumulation for trillion cell digital elevation models on desktops or clusters. Environ. Model. Softw. 2017, 92, 202–212. [Google Scholar] [CrossRef] [Green Version]
- Gong, J.; Xie, J. Extraction of drainage networks from large terrain datasets using high throughput computing. Comput. Geosci. 2009, 35, 337–346. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; McGrath, H.; Stefanakis, E. Geovisualization of Hydrological Flow in Hexagonal Grid Systems. Geographies 2022, 2, 227-244. https://doi.org/10.3390/geographies2020016
Li M, McGrath H, Stefanakis E. Geovisualization of Hydrological Flow in Hexagonal Grid Systems. Geographies. 2022; 2(2):227-244. https://doi.org/10.3390/geographies2020016
Chicago/Turabian StyleLi, Mingke, Heather McGrath, and Emmanuel Stefanakis. 2022. "Geovisualization of Hydrological Flow in Hexagonal Grid Systems" Geographies 2, no. 2: 227-244. https://doi.org/10.3390/geographies2020016
APA StyleLi, M., McGrath, H., & Stefanakis, E. (2022). Geovisualization of Hydrological Flow in Hexagonal Grid Systems. Geographies, 2(2), 227-244. https://doi.org/10.3390/geographies2020016