

The Temporal Structure of the Running Cycle, an Essential Element in the Analysis: A Critical Review

 , ,
, ,  , , , ,
, , , ,  and
and
Abstract
1. Introduction
1.1. The Phenomenon of Running from the Point of View of Sports Biomechanics
1.2. History and Evolution of the Running Cycle

1.3. The Underuse of Temporal Structure in Biomechanical Analysis
2. Materials and Methods
3. Results
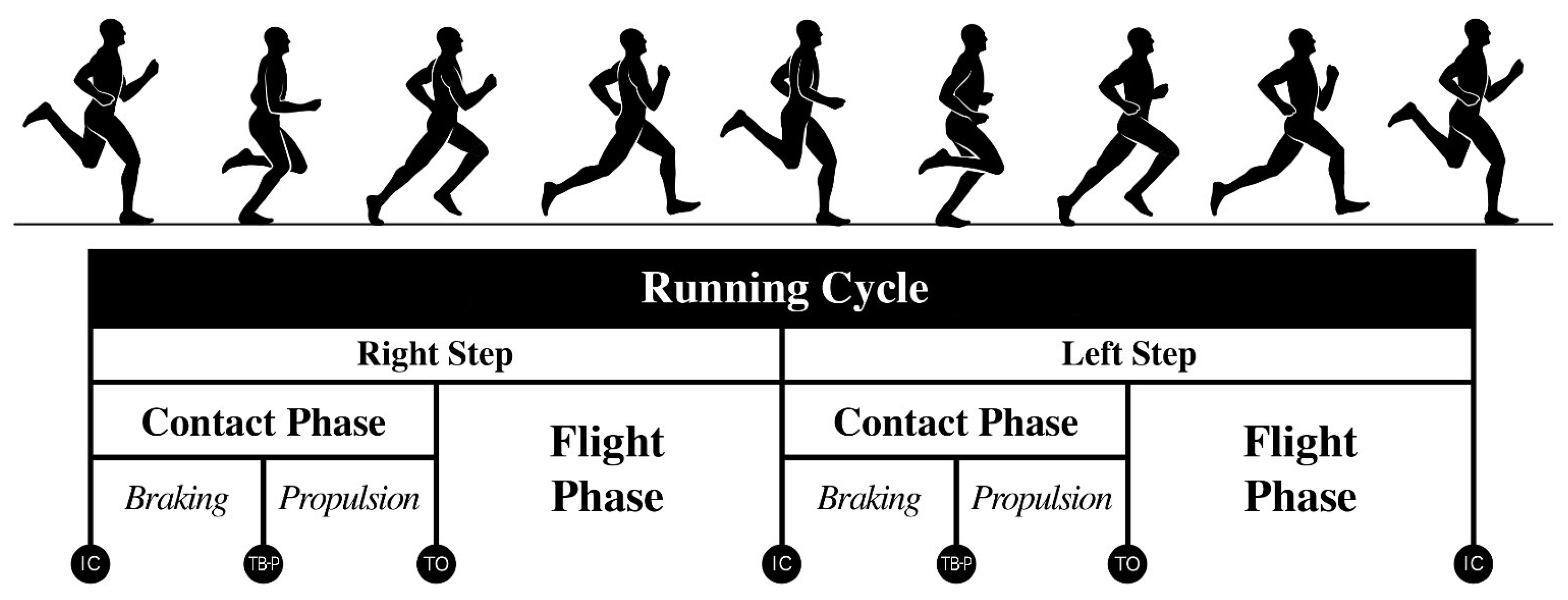
3.1. Model of Temporal Structure for Running Cycle in Sport
3.1.1. Definition and Characterization of Phases and Subphases
3.1.2. Definition and Characterization of Key Events
3.2. Methods for Identifying Key Events
3.2.1. Dynamometry

{kind=link}
{kind=link}
| Reference | Initial Contact | Toe-Off | ||
|---|---|---|---|---|
| Over Ground | Treadmill | Over Ground | Treadmill | |
| [68] | A positive change in the vertical ground reaction force greater than 1 N ms−1 (or 1000 Ns−1), below a threshold of 100 N | |||
| [69] | Above 10–20% of body mass | Under 10–20% of body mass | ||
| [70] | The first data point in which the vertical force value (N) increased to and remained greater than two standard deviations above the zero-load level | |||
| [59] | Above 10 N | Not available | Under 5 N | Not available |
| [71] | Above 20 N | Above 20 N | Under 20 N | Under 20 N |
| [63] | Above 10 N | Above 40 N | Under 10 N | Under 40 N |
| [72] | Above 30 N | Above 30 N | Under 30 N | Under 30 N |
3.2.2. Motion Capture Systems
4. Practical Applications
Example for the Application of the Model
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nicola, T.L.; Jewison, D.J. The Anatomy and Biomechanics of Running. Clin. Sports Med. 2012, 31, 187–201. [Google Scholar] [CrossRef] [PubMed]
- Novacheck, T.F. The biomechanics of running. Gait Posture 1998, 7, 77–95. [Google Scholar] [CrossRef] [PubMed]
- Slocum, D.B.; James, S.L. Biomechanics of running. JAMA 1968, 205, 721–728. [Google Scholar] [CrossRef] [PubMed]
- James, S.L. Biomechanical and neuromuscular aspects of running. Exerc. Sport. Sci. Rev. 1973, 1, 189–216. [Google Scholar] [CrossRef]
- Gibson, T.; Jeffery, R.S.; Bakheit, A.M.O. Comparison of three definitions of the mid-stance and mid-swing events of the gait cycle in children. Disabil. Rehabil. 2006, 28, 625–628. [Google Scholar] [CrossRef]
- Mills, P.M.; Barrett, R.S.; Morrison, S. Agreement between footswitch and ground reaction force techniques for identifying gait events: Inter-session repeatability and the effect of walking speed. Gait Posture 2007, 26, 323–326. [Google Scholar] [CrossRef]
- Bermejo, J. Revisión del concepto de Técnica Deportiva desde la perspectiva biomecánica del movimiento. In EmásF: Revista Digital de Educación Física; Juan Carlos Muñoz Díaz: Cazorla, Spain, 2013; pp. 45–59. [Google Scholar]
- Aedo Muñoz, E.A.; Bustamante Garrido, A.F. Conceptualización de la biomecánica deportiva y biomecánica de la educación física. In Revista Educación Física Chile; Universidad Metropolitana de Ciencias de la Educación: Ñuñoa, Chile, 2012. [Google Scholar]
- Fortney, V.L. The Kinematics and Kinetics of the Running Pattern of Two-, Four-, and Six-Year-Old Children. Res. Q. Exerc. Sport 1983, 54, 126–135. [Google Scholar] [CrossRef]
- Fields, K.B.; Sykes, J.C.; Walker, K.M.; Jackson, J.C. Prevention of running injuries. Curr. Sports Med. Rep. 2010, 9, 176–182. [Google Scholar] [CrossRef]
- Fu, F.H.; Feldman, A. The biomechanics of running: Practical considerations. Tech. Orthop. 1990, 5, 8–14. [Google Scholar] [CrossRef]
- Li, L. How Can Sport Biomechanics Contribute to the Advance of World Record and Best Athletic Performance? Meas. Phys. Educ. Exerc. Sci. 2012, 16, 194–202. [Google Scholar] [CrossRef]
- Moore, I.S. Is There an Economical Running Technique? A Review of Modifiable Biomechanical Factors Affecting Running Economy. Sports Med. 2016, 46, 793–807. [Google Scholar] [CrossRef] [PubMed]
- Nelson, R.C.; and Gregor, R.J. Biomechanics of Distance Running: A Longitudinal Study. Res. Q. Am. Alliance Health Phys. Educ. Recreat. 1976, 47, 417–428. [Google Scholar] [CrossRef]
- Knudson, D.V. (Ed.) Qualitative Diagnosis of Human Movement: Improving Performance in Sport and Exercise. In Qualitative Diagnosis of Human Movement: Improving Performance in Sport and Exercise, 3rd ed.; Human Kinetics: Champaign, IL, USA, 2013. [Google Scholar]
- Bartlett, R. Introduction to Sports Biomechanics, 2nd ed.; Routledge: London, UK, 2007. [Google Scholar]
- Lees, A. Technique analysis in sports: A critical review. J. Sports Sci. 2002, 20, 813–828. [Google Scholar] [CrossRef] [PubMed]
- Elliott, B. Biomechanics: An integral part of sport science and sport medicine. J. Sci. Med. Sport 1999, 2, 299–310. [Google Scholar] [CrossRef]
- Morante, J.; Izquierdo, M. Técnica deportiva, modelos técnicos y estilo personal. In Biomecánica y Bases Neuromusculares de la Actividad Física y el Deporte; Editorial Médica Panamericana: Mexico City, Mexico, 2008; p. 771. [Google Scholar]
- Aedo Muñoz, E.; Martínez Catalán, R.; Miarka, B.; Merino Muñoz, P.; Brito, C.; Hermosilla Palma, F.; Pérez Contreras, J. Cinemática de pateo con empeine en jugadores profesionales varones de futsal chilenos: Propuesta de un mo-delo cinemático (Instep kicking kinematics in Chilean professional male futsal players: Proposal of a kinematic model). Retos 2023, 47, 933–940. [Google Scholar] [CrossRef]
- Diener-González, L.; Aedo-Muñoz, E. Indicadores cinemáticos del salto en extensión. Arrancada 2017, 17, 75–83. [Google Scholar]
- Moreno de la Fuente, J.; Rojas-Briceño, L.; Escalona-Riquelme, J.; Merino-Muñoz, P.; Cerda-Kohler, H.; Miarka, B.; Brito, C.; Arriagada-Tarifeño, D.; Aedo-Muñoz, E. Modelo técnico del push de empuje en el hockey sobre césped. Una propuesta de análisis (Technical model of the push in field hockey. An analysis proposal). Retos 2022, 45, 318–325. [Google Scholar] [CrossRef]
- Elliott, B.C.; Blanksby, B.A. The synchronization of muscle activity and body segment movements during a running cycle. Med. Sci. Sports 1979, 11, 322–327. [Google Scholar] [CrossRef]
- Munro, C.F.; Miller, D.I.; Fuglevand, A.J. Ground reaction forces in running: A reexamination. J. Biomech. 1987, 20, 147–155. [Google Scholar] [CrossRef]
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]
- Dugan, S.A.; Bhat, K.P. Biomechanics and analysis of running gait. Phys. Med. Rehabil. Clin. N. Am. 2005, 16, 603–621. [Google Scholar] [CrossRef] [PubMed]
- Thordarson, D.B. Running biomechanics. Clin. Sports Med. 1997, 16, 239–247. [Google Scholar] [CrossRef] [PubMed]
- Ounpuu, S. The biomechanics of running: A kinematic and kinetic analysis. Instr. Course Lect. 1990, 39, 305–318. [Google Scholar] [PubMed]
- Mattes, K.; Wolff, S.; Alizadeh, S. Kinematic Stride Characteristics of Maximal Sprint Running of Elite Sprinters—Verification of the “Swing-Pull Technique”. J. Hum. Kinet. 2021, 77, 15–24. [Google Scholar] [CrossRef]
- Blyton, S.J.; Snodgrass, S.J.; Pizzari, T.; Birse, S.M.; Likens, A.D.; Edwards, S. The impact of previous musculoskeletal injury on running gait variability: A systematic review. Gait Posture 2023, 101, 124–133. [Google Scholar] [CrossRef]
- Ceyssens, L.; Vanelderen, R.; Barton, C.; Malliaras, P.; Dingenen, B. Biomechanical Risk Factors Associated with Running-Related Injuries: A Systematic Review. Sports Med. 2019, 49, 1095–1115. [Google Scholar] [CrossRef]
- McNally, T.; Edwards, S.; Halaki, M.; O’Dwyer, N.; Pizzari, T.; Blyton, S. Quantifying demands on the hamstrings during high-speed running: A systematic review and meta-analysis. Scand. J. Med. Sci. Sports 2023, 33, 2423–2443. [Google Scholar] [CrossRef]
- Grant, M.J.; Booth, A. A typology of reviews: An analysis of 14 review types and associated methodologies. Health Inf. Libr. J. 2009, 26, 91–108. [Google Scholar] [CrossRef]
- Oxford English Dictionary. Cycle, n.1, Sense 2.b. Available online: https://www.oed.com/dictionary/cycle_n1?tab=meaning_and_use (accessed on 27 April 2025).
- Oxford English Dictionary. Fase, n2, sentido 3.a. Available online: https://www.oed.com/dictionary/phase_n2?tab=meaning_and_use#30733688 (accessed on 27 April 2025).
- Oxford English Dictionary. Event, n., sense II.8. Available online: https://www.oed.com/dictionary/event_n?tab=meaning_and_use&tl=true#1218143220 (accessed on 27 April 2025).
- Ciacci, S.; Di Michele, R.; Merni, F. Kinematic analysis of the braking and propulsion phases during the support time in sprint running. Gait Posture 2010, 31, 209–212. [Google Scholar] [CrossRef]
- Högberg, P. Length of stride, stride frequency, “flight” period and maximum distance between the feet during running with different speeds. Arbeitsphysiologie 1952, 14, 431–436. [Google Scholar] [CrossRef]
- Mann, R.A.; Hagy, J. Biomechanics of walking, running, and sprinting. Am. J. Sports Med. 1980, 8, 345–350. [Google Scholar] [CrossRef] [PubMed]
- Kapri, E.; Mehta, M.; Singh, K. Biomechanics of running: An overview on gait cycle. Int. J. Phys. Educ. Fit. Sports 2021, 10, 1–9. [Google Scholar] [CrossRef]
- Cavanagh, P.R.; Lafortune, M.A. Ground reaction forces in distance running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef]
- Geiringer, S.R. The biomechanics of running. J. Back. Musculoskelet. Rehabil. 1995, 5, 273–279. [Google Scholar] [CrossRef]
- Hanley, B. The Biomechanics of Distance Running; Routledge: London, UK, 2021; pp. 17–27. [Google Scholar]
- Miller, D.I. Biomechanics of running.-what should the future hold? Can. J. Appl. Sport Sci. 1978, 3, 229–236. [Google Scholar]
- Kenneally-Dabrowski, C.; Brown, N.A.T.; Warmenhoven, J.; Serpell, B.G.; Perriman, D.; Lai, A.K.M.; Spratford, W. Late swing running mechanics influence hamstring injury susceptibility in elite rugby athletes: A prospective exploratory analysis. J. Biomech. 2019, 92, 112–119. [Google Scholar] [CrossRef]
- Dorn, T.W.; Schache, A.G.; Pandy, M.G. Muscular strategy shift in human running: Dependence of running speed on hip and ankle muscle performance. J. Exp. Biol. 2012, 215, 1944–1956. [Google Scholar] [CrossRef]
- Morin, J.B.; Bourdin, M.; Edouard, P.; Peyrot, N.; Samozino, P.; Lacour, J.R. Mechanical determinants of 100-m sprint running performance. Eur. J. Appl. Physiol. 2012, 112, 3921–3930. [Google Scholar] [CrossRef]
- Rottier, T.D.; Allen, S.J. The influence of swing leg technique on maximum running speed. J. Biomech. 2021, 126, 110640. [Google Scholar] [CrossRef]
- Folland, J.P.; Allen, S.J.; Black, M.I.; Handsaker, J.C.; Forrester, S.E. Running Technique is an Important Component of Running Economy and Performance. Med. Sci. Sports Exerc. 2017, 49, 1412–1423. [Google Scholar] [CrossRef]
- Chumanov, E.S.; Schache, A.G.; Heiderscheit, B.C.; Thelen, D.G. Hamstrings are most susceptible to injury during the late swing phase of sprinting. Br. J. Sports Med. 2012, 46, 90. [Google Scholar] [CrossRef] [PubMed]
- Almeida, M.O.; Davis, I.S.; Lopes, A.D. Biomechanical Differences of Foot-Strike Patterns During Running: A Systematic Review With Meta-analysis. J. Orthop. Sports Phys. Ther. 2015, 45, 738–755. [Google Scholar] [CrossRef] [PubMed]
- Tartaruga, M.P.; Brisswalter, J.; Peyré-Tartaruga, L.A.; Avila, A.O.; Alberton, C.L.; Coertjens, M.; Cadore, E.L.; Tiggemann, C.L.; Silva, E.M.; Kruel, L.F. The relationship between running economy and biomechanical variables in distance runners. Res. Q. Exerc. Sport 2012, 83, 367–375. [Google Scholar] [CrossRef]
- Leskinen, A.; Häkkinen, K.; Virmavirta, M.; Isolehto, J.; Kyröläinen, H. Comparison of running kinematics between elite and national-standard 1500-m runners. Sports Biomech. 2009, 8, 1–9. [Google Scholar] [CrossRef]
- Trowell, D.; Phillips, E.; Saunders, P.; Bonacci, J. The relationship between performance and biomechanics in middle-distance runners. Sports Biomech. 2021, 20, 974–984. [Google Scholar] [CrossRef]
- Orendurff, M.S.; Kobayashi, T.; Tulchin-Francis, K.; Tullock, A.M.H.; Villarosa, C.; Chan, C.; Kraus, E.; Strike, S. A little bit faster: Lower extremity joint kinematics and kinetics as recreational runners achieve faster speeds. J. Biomech. 2018, 71, 167–175. [Google Scholar] [CrossRef]
- Kirtley, C. Introduction: Theory and practice in gait analysis. In Clinical Gait Analysis; Churchill Livingstone: Edinburgh, UK, 2006; pp. ix–xii. [Google Scholar]
- Mann, R.A.; Moran, G.T.; Dougherty, S.E. Comparative electromyography of the lower extremity in jogging, running, and sprinting. Am. J. Sports Med. 1986, 14, 501–510. [Google Scholar] [CrossRef]
- Lee, C.R.; Farley, C.T. Determinants of the center of mass trajectory in human walking and running. J. Exp. Biol. 1998, 201, 2935–2944. [Google Scholar] [CrossRef]
- Maiwald, C.; Sterzing, T.; Mayer, T.; Milani, T.L. Detecting foot-to-ground contact from kinematic data in running. Footwear Sci. 2009, 1, 111–118. [Google Scholar] [CrossRef]
- Osis, S.T.; Hettinga, B.A.; Leitch, J.; Ferber, R. Predicting timing of foot strike during running, independent of striking technique, using principal component analysis of joint angles. J. Biomech. 2014, 47, 2786–2789. [Google Scholar] [CrossRef]
- Rivadulla, A.; Chen, X.; Weir, G.; Cazzola, D.; Trewartha, G.; Hamill, J.; Preatoni, E. Development and validation of FootNet; a new kinematic algorithm to improve foot-strike and toe-off detection in treadmill running. PLoS ONE 2021, 16, e0248608. [Google Scholar] [CrossRef] [PubMed]
- Asmussen, M.J.; Kaltenbach, C.; Hashlamoun, K.; Shen, H.; Federico, S.; Nigg, B.M. Force measurements during running on different instrumented treadmills. J. Biomech. 2019, 84, 263–268. [Google Scholar] [CrossRef] [PubMed]
- Leitch, J.; Stebbins, J.; Paolini, G.; Zavatsky, A.B. Identifying gait events without a force plate during running: A comparison of methods. Gait Posture 2011, 33, 130–132. [Google Scholar] [CrossRef] [PubMed]
- O’Connor, C.M.; Thorpe, S.K.; O’Malley, M.J.; Vaughan, C.L. Automatic detection of gait events using kinematic data. Gait Posture 2007, 25, 469–474. [Google Scholar] [CrossRef]
- Hunter, J.P.; Marshall, R.N.; McNair, P.J. Relationships between Ground Reaction Force Impulse and Kinematics of Sprint-Running Acceleration. J. Appl. Biomech. 2005, 21, 31–43. [Google Scholar] [CrossRef]
- Mero, A.; Komi, P.V. EMG, Force, and Power Analysis of Sprint-Specific Strength Exercises. J. Appl. Biomech. 1994, 10, 1–13. [Google Scholar] [CrossRef]
- Yu, L.; Mei, Q.; Xiang, L.; Liu, W.; Mohamad, N.I.; István, B.; Fernandez, J.; Gu, Y. Principal Component Analysis of the Running Ground Reaction Forces With Different Speeds. Front. Bioeng. Biotechnol. 2021, 9, 2021. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Huang, H.-W.C.; Hamerski, C.M.; Kram, R. The Independent Effects of Gravity and Inertia on Running Mechanics. J. Exp. Biol. 2000, 203, 229–238. [Google Scholar] [CrossRef]
- Riley, P.O.; Dicharry, J.; Franz, J.; Della Croce, U.; Wilder, R.P.; Kerrigan, D.C. A kinematics and kinetic comparison of overground and treadmill running. Med. Sci. Sports Exerc. 2008, 40, 1093–1100. [Google Scholar] [CrossRef]
- Bezodis, I.N.; Kerwin, D.G.; Salo, A.I. Lower-limb mechanics during the support phase of maximum-velocity sprint running. Med. Sci. Sports Exerc. 2008, 40, 707–715. [Google Scholar] [CrossRef]
- Fellin, R.E.; Rose, W.C.; Royer, T.D.; Davis, I.S. Comparison of methods for kinematic identification of footstrike and toe-off during overground and treadmill running. J. Sci. Med. Sport 2010, 13, 646–650. [Google Scholar] [CrossRef] [PubMed]
- Kluitenberg, B.; Bredeweg, S.W.; Zijlstra, S.; Zijlstra, W.; Buist, I. Comparison of vertical ground reaction forces during overground and treadmill running. A validation study. BMC Musculoskelet. Disord. 2012, 13, 235. [Google Scholar] [CrossRef] [PubMed]
- Eagles, A.N.; Sayers, M.G.L.; Bousson, M.; Lovell, D.I. Current Methodologies and Implications of Phase Identification of the Vertical Jump: A Systematic Review and Meta-analysis. Sports Med. 2015, 45, 1311–1323. [Google Scholar] [CrossRef] [PubMed]
- Brughelli, M.; Cronin, J.; Chaouachi, A. Effects of running velocity on running kinetics and kinematics. J. Strength Cond. Res. 2011, 25, 933–939. [Google Scholar] [CrossRef]
- Tirosh, O.; Sparrow, W.A. Identifying Heel Contact and Toe-Off Using Forceplate Thresholds with a Range of Digital-Filter Cutoff Frequencies. J. Appl. Biomech. 2003, 19, 178–184. [Google Scholar] [CrossRef]
- Hreljac, A.; Stergiou, N. Phase determination during normal running using kinematic data. Med. Biol. Eng. Comput. 2000, 38, 503–506. [Google Scholar] [CrossRef]
- Smith, L.; Preece, S.; Mason, D.; Bramah, C. A comparison of kinematic algorithms to estimate gait events during overground running. Gait Posture 2015, 41, 39–43. [Google Scholar] [CrossRef]
- Milner, C.E.; Paquette, M.R. A kinematic method to detect foot contact during running for all foot strike patterns. J. Biomech. 2015, 48, 3502–3505. [Google Scholar] [CrossRef]
- Handsaker, J.C.; Forrester, S.E.; Folland, J.P.; Black, M.I.; Allen, S.J. A kinematic algorithm to identify gait events during running at different speeds and with different footstrike types. J. Biomech. 2016, 49, 4128–4133. [Google Scholar] [CrossRef]
- Patoz, A.; Lussiana, T.; Gindre, C.; Malatesta, D. A novel kinematic detection of foot-strike and toe-off events during noninstrumented treadmill running to estimate contact time. J. Biomech. 2021, 128, 110737. [Google Scholar] [CrossRef]
- Stefanyshyn, D.J.; Nigg, B.M. Dynamic Angular Stiffness of the Ankle Joint during Running and Sprinting. J. Appl. Biomech. 1998, 14, 292–299. [Google Scholar] [CrossRef] [PubMed]
- Choh, M.; Dolenec, A.; Jošt, B. Kinematic, Kinetic and Electromyographic Characteristics of the Sprinting Stride of Top Female Sprinters. In Proceedings of the 17 International Symposium on Biomechanics in Sports, Perth, Australia, 30 June–6 July 1999. [Google Scholar]
- Mero, A.; Komi, P.V.; Gregor, R.J. Biomechanics of Sprint Running. Sports Med. 1992, 13, 376–392. [Google Scholar] [CrossRef] [PubMed]
- Luhtanen, P.; Komi, P. Mechanical factors influencing running speed. Biomech. VI-B 1978, 2, 23–28. [Google Scholar]
- Mero, A.; Komi, P.V. Force-, EMG-, and elasticity-velocity relationships at submaximal, maximal and supramaximal running speeds in sprinters. Eur. J. Appl. Physiol. Occup. Physiol. 1986, 55, 553–561. [Google Scholar] [CrossRef]
- Nilsson, J.; Thorstensson, A. Ground reaction forces at different speeds of human walking and running. Acta Physiol. Scand. 1989, 136, 217–227. [Google Scholar] [CrossRef]
- Bates, B.; Osternig, L.; Mason, B.; James, S. Lower Extremity Function During the Support Phase of Running. In Proceedings of the VI International Congress of Biomechanics, Copenhagen, Denmark, 10–13 July 1977; pp. 30–39. [Google Scholar]
- Hardin, E.C.; van den Bogert, A.J.; Hamill, J. Kinematic adaptations during running: Effects of footwear, surface, and duration. Med. Sci. Sports Exerc. 2004, 36, 838–844. [Google Scholar] [CrossRef]
- Stergiou, N.; Bates, B.T. The relationship between subtalar and knee joint function as a possible mechanism for running injuries. Gait Posture 1997, 6, 177–185. [Google Scholar] [CrossRef]
- Leporace, G.; Metsavaht, L.; Gonzalez, F.F.; Arcanjo de Jesus, F.; Machado, M.; Celina Guadagnin, E.; Gomes-Neto, M. Validity and reliability of two-dimensional video-based assessment to measure joint angles during running: A systematic review and meta-analysis. J. Biomech. 2023, 157, 111747. [Google Scholar] [CrossRef]
- Beck, J.; Stolterman, E. Examining Practical, Everyday Theory Use in Design Research. She Ji J. Des. Econ. Innov. 2016, 2, 125–140. [Google Scholar] [CrossRef]
- Abbasi, A.; Yazdanbakhsh, F.; Tazji, M.K.; Aghaie Ataabadi, P.; Svoboda, Z.; Nazarpour, K.; Vieira, M.F. A comparison of coordination and its variability in lower extremity segments during treadmill and overground running at different speeds. Gait Posture 2020, 79, 139–144. [Google Scholar] [CrossRef]
- Simoni, L.; Pancani, S.; Vannetti, F.; Macchi, C.; Pasquini, G. Relationship between Lower Limb Kinematics and Upper Trunk Acceleration in Recreational Runners. J. Healthc. Eng. 2020, 2020, 8973010. [Google Scholar] [CrossRef] [PubMed]
- Sever, O.; Öztaşyonar, Y.; Ceylan, H.İ.; Miçooğullari, B.O.; Morgans, R.; Bragazzi, N.L. Unveiling the influence of hip isokinetic strength on lower extremity running kinematics in male national middle-distance runners: A correlational analysis. BMC Sports Sci. Med. Rehabil. 2024, 16, 157. [Google Scholar] [CrossRef] [PubMed]
- Napier, C.; Jiang, X.; MacLean, C.L.; Menon, C.; Hunt, M.A. The use of a single sacral marker method to approximate the centre of mass trajectory during treadmill running. J. Biomech. 2020, 108, 109886. [Google Scholar] [CrossRef] [PubMed]
| Definition | |
|---|---|
| Initial contact | The instant in which the foot contacts the ground, regardless of the portion of the foot that makes contact [2,26,27] |
| Transition of braking–propulsion (TB–P) | Moment of transition from the braking subphase to the propulsion subphase by a change in sense of the anterior-posterior force vector [2,26,37] |
| Toe-off | Moment in which the foot leaves the ground [2,26,27] |
| Contact phase | Period of time in which any part of the foot rests unilaterally on the ground. It starts with the initial contact and ends with the toe-off [3,25,27,38,39] |
| Braking subphase | The period in which the foot is in contact with the ground and the GRF opposes the forward movement is characterized by the deceleration and descent of the center of mass and the accumulation of elastic energy in the lower limb. It begins with the initial contact and ends with the toe-off [2,24,25] |
| Propulsion subphase | The period in which the foot is in contact with the ground and the GRF is coherent to the forward movement is characterized by the acceleration and rise in the center of mass, in addition to the release of elastic energy of the lower limb. It begins with and ends with the toe-off [2,24,25] |
| Flight phase | Period of time in which there is no contact between the ground and the person, starting with the toe-off and ending with the initial contact of the opposite limb [11,26,27,38,40] |
| Reference | Conditions | Initial Contact | Toe-Off | ||
|---|---|---|---|---|---|
| In-Puts | Outcome (ms/Frames) | In-Puts | Outcome (ms/Frames) | ||
| [76] |
| Foot angular acceleration |
| Foot angular acceleration |
|
| [63] |
| Position and acceleration of hallux and posterior heel distal |
| Position and acceleration of hallux and posterior heel distal. |
|
| [77] |
| Vertical displacement between the heel and posterior superior iliac spines |
| Vertical displacement between the second metatarsal head and posterior superior iliac spines |
|
| [78] |
| Velocity of the pelvis center of mass |
| Not applicable |
|
| [79] |
| Acceleration of the posterior aspect of the calcaneus and 1st metatarsal head |
| Vertical jerk peak of the distal end of the hallux |
|
| [80] |
| Vertical acceleration of foot calcaneus and 3er metatarsal |
| Position of the 3er metatarsal |
|
| [61] |
| Anteroposterior velocity of the distal tibia, ankle angle, anteroposterior and vertical velocity of the foot center mass |
| Anteroposterior velocity of the distal tibia, ankle angle, anteroposterior, and vertical velocity of the foot center mass |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Inostroza-Ríos, F.; Merino-Muñoz, P.; Sánchez-Ramírez, C.; Garrido, A.B.; Pérez-Contreras, J.; Cancino-Jimenez, J.; Arriagada-Tarifeño, D.; Aedo-Muñoz, E.; Brito, C.J. The Temporal Structure of the Running Cycle, an Essential Element in the Analysis: A Critical Review. Biomechanics 2025, 5, 40. https://doi.org/10.3390/biomechanics5020040
Inostroza-Ríos F, Merino-Muñoz P, Sánchez-Ramírez C, Garrido AB, Pérez-Contreras J, Cancino-Jimenez J, Arriagada-Tarifeño D, Aedo-Muñoz E, Brito CJ. The Temporal Structure of the Running Cycle, an Essential Element in the Analysis: A Critical Review. Biomechanics. 2025; 5(2):40. https://doi.org/10.3390/biomechanics5020040
Chicago/Turabian StyleInostroza-Ríos, Felipe, Pablo Merino-Muñoz, Celso Sánchez-Ramírez, Alejandro Bustamante Garrido, Jorge Pérez-Contreras, Jorge Cancino-Jimenez, David Arriagada-Tarifeño, Esteban Aedo-Muñoz, and Ciro José Brito. 2025. "The Temporal Structure of the Running Cycle, an Essential Element in the Analysis: A Critical Review" Biomechanics 5, no. 2: 40. https://doi.org/10.3390/biomechanics5020040
APA StyleInostroza-Ríos, F., Merino-Muñoz, P., Sánchez-Ramírez, C., Garrido, A. B., Pérez-Contreras, J., Cancino-Jimenez, J., Arriagada-Tarifeño, D., Aedo-Muñoz, E., & Brito, C. J. (2025). The Temporal Structure of the Running Cycle, an Essential Element in the Analysis: A Critical Review. Biomechanics, 5(2), 40. https://doi.org/10.3390/biomechanics5020040