


Dynamic Response of Water Meters Used for Potable Water †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Water Meter
2.1. Displacement Water Meters
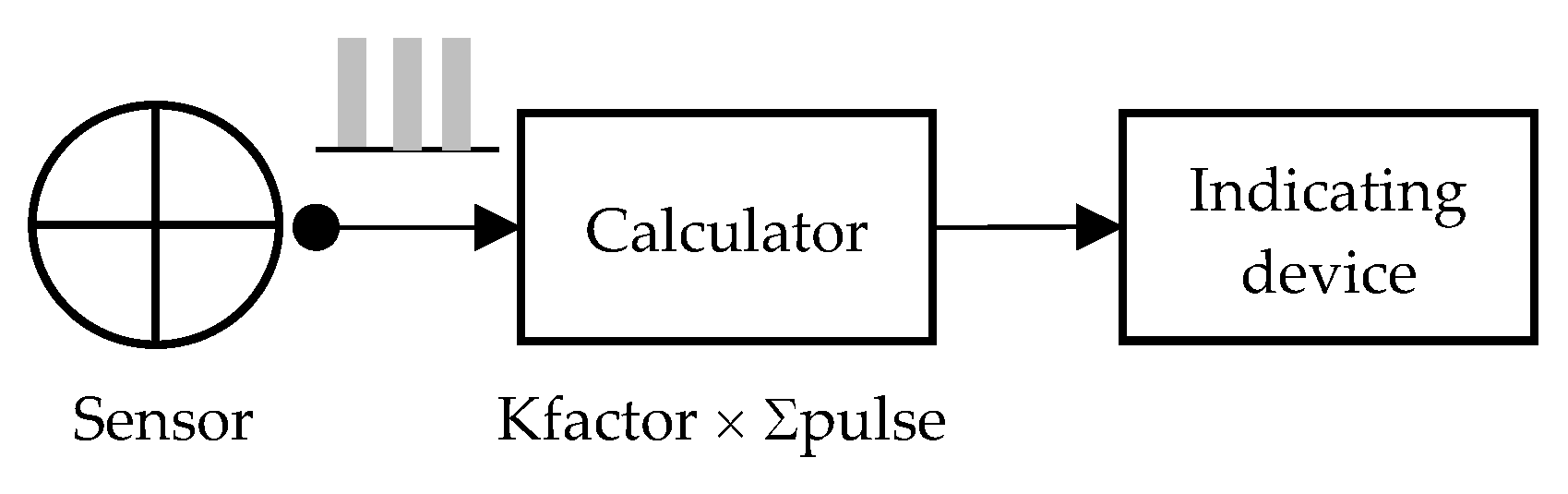
2.2. Turbine Volumetric Water Meter (Velocity Meters)
2.3. Ultrasonic Water Meter (Velocity Meters)
2.4. Electromagnetic Water Meter (Velocity Meters)
3. Dynamic Response of Continuous-Time Water Meter
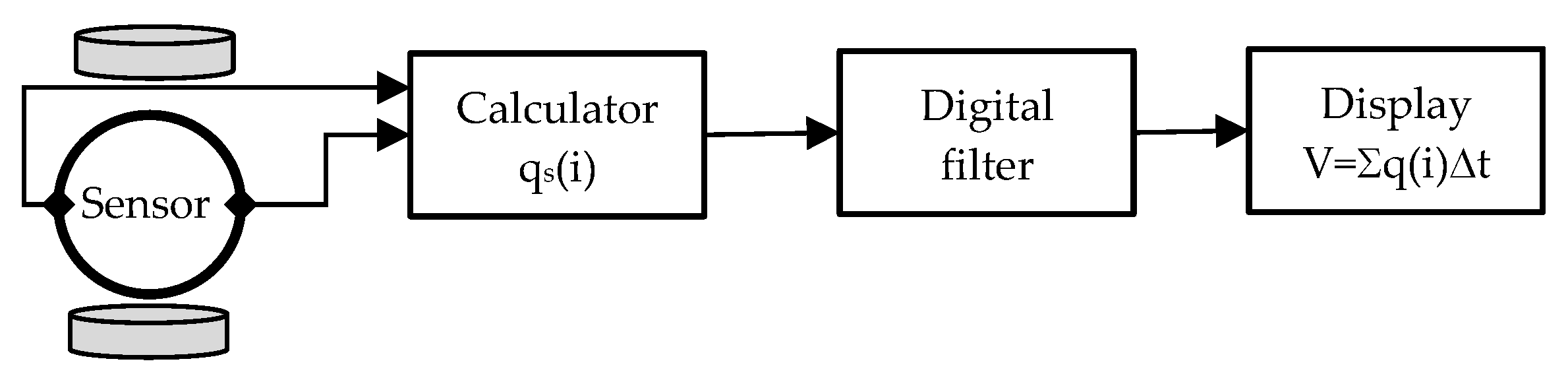
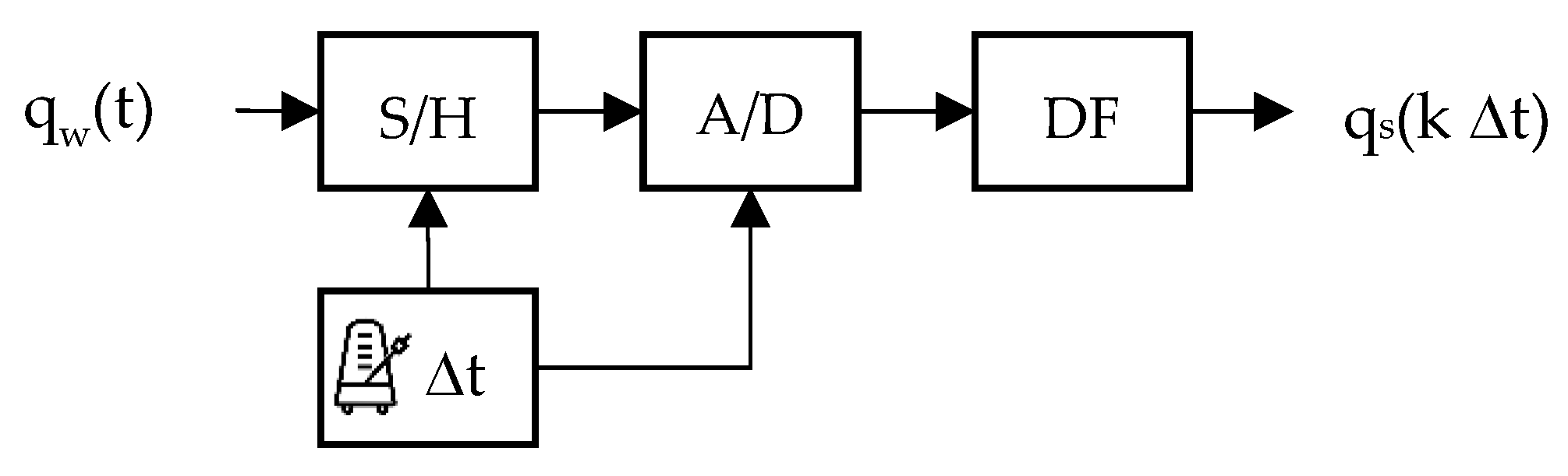
4. Dynamic Response of Discrete-Time Water Meter
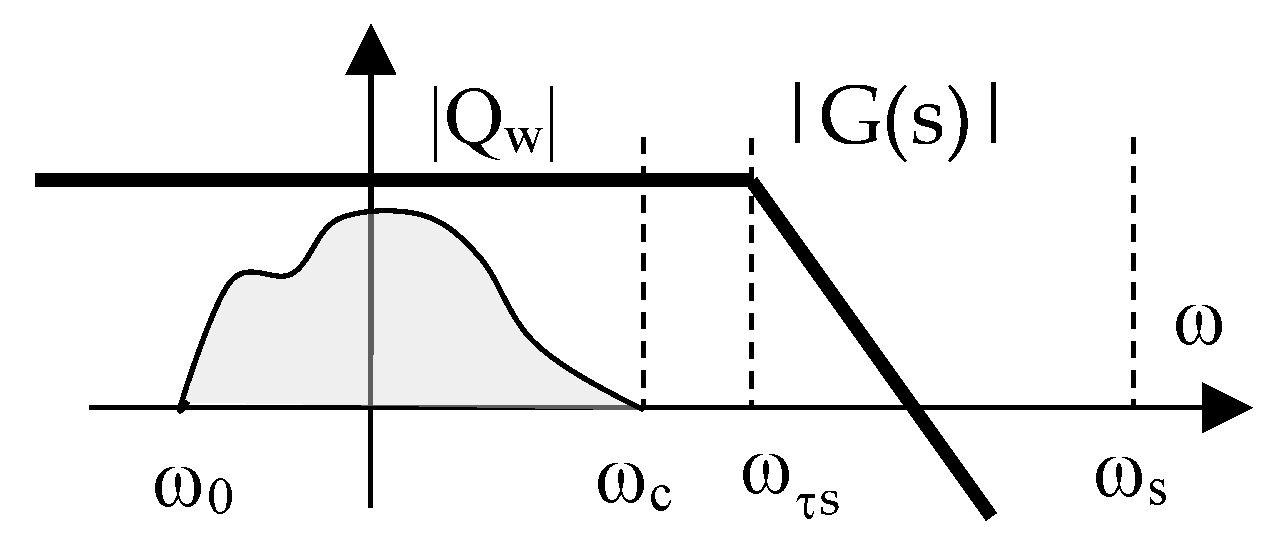
5. Measurement Error and Sampling Rate
6. Dynamic Response, Classification and Test Methods
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- OIML R 49-1:2013. Available online: https://www.oiml.org/en/files/pdf_r/r049-1-e13.pdf (accessed on 21 April 2022).
- ISO 4064-1:2014. Available online: https://www.iso.org/standard/55371.html (accessed on 21 April 2022).
- Schumann, D.; Kroner, C.; Unsal, B.; Haack, S.; Kondrup, J.B.; Christophersen, N.; Benkova, M.; Knotek, S. Measurements of water consumption for the development of new test regimes for domestic water meters. Flow Meas. Instrum. 2021, 79, 101963. [Google Scholar] [CrossRef]
- Büker, O.; Stolt, K.; Lindström, K.; Wennergren, P.; Penttinen, O.; Mattias son, K. A unique test facility for calibration of domestic flow meters under dynamic flow conditions. Flow Meas. Instrum. 2021, 79, 101934. [Google Scholar] [CrossRef]
- ISO4006:1991. Available online: https://www.iso.org/standard/9681.html (accessed on 21 April 2022).
- Sydenham, P.H. Handbook of Measurement Science, Volume 2: Practical Fundamentals, 5th ed.; Wiley: Oxford, UK, 1997; ISBN 0-471-10493-0. [Google Scholar]
- Lee, B.; Cheesewright, R.; Clark, C. The dynamic response of small turbine flowmeters in liquid flows. Flow Meas. Instrum. 2004, 15, 239–248. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, T. Research on the dynamic characteristics of a turbine flow meter. Flow Meas. Instrum. 2017, 55, 59–66. [Google Scholar] [CrossRef]
- ISO12242:2012. Available online: https://www.iso.org/standard/51289.html (accessed on 21 April 2022).
- Sydenham, P.H. Handbook of Measurement Science, Volume 1: Theoretical Fundamentals, 1st ed.; Wiley: Oxford, UK, 1982; ISBN 0-471-10037-4. [Google Scholar]
- Bose, N.K. Digital Filters: Theory and Applications, 1st ed.; North-Holland, Elsevier Science Publishing Co., Inc.: New York, NY, USA, 1985; ISBN 0-444-00980-9. [Google Scholar]
- ISO 20456:2017. Available online: https://www.iso.org/standard/68092.html (accessed on 21 April 2022).
- Shercliff, J.A. The Theory of Electromagnetic Flow-Measurement, 2nd ed.; Cambridge University Press: Cambridge, UK, 1987; ISBN 0-521-33554-X. [Google Scholar]
- ISO/IEC 17025:2017. Available online: https://www.iso.org/standard/66912.html (accessed on 21 April 2022).



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lanza, L. Dynamic Response of Water Meters Used for Potable Water. Environ. Sci. Proc. 2022, 21, 31. https://doi.org/10.3390/environsciproc2022021031
Lanza L. Dynamic Response of Water Meters Used for Potable Water. Environmental Sciences Proceedings. 2022; 21(1):31. https://doi.org/10.3390/environsciproc2022021031
Chicago/Turabian StyleLanza, Luisfilippo. 2022. "Dynamic Response of Water Meters Used for Potable Water" Environmental Sciences Proceedings 21, no. 1: 31. https://doi.org/10.3390/environsciproc2022021031
APA StyleLanza, L. (2022). Dynamic Response of Water Meters Used for Potable Water. Environmental Sciences Proceedings, 21(1), 31. https://doi.org/10.3390/environsciproc2022021031