1. Introduction
This article deals with Spoke-Type Axial-Flux Permanent Magnet (STAFPM) machines, which are of great interest in transportation applications [
1,
2]. They can provide a much higher air-gap flux density due to the flux concentration achieved by ferromagnetic pole pieces arranged between the permanent magnets at the rotor. Thus, they can achieve extremely high specific torque [
3,
4], just like other permanent magnet axial-flux machines [
5]. It is possible in the spoke-type architecture to ensure flux weakening [
6,
7]. One of the models most frequently used to study electric motors is the DQ model [
8,
9]. However, this model does not consider the effect of the torque ripples or other phenomena associated with the magnetic circuit’s geometry unless using a mixed approach with FEA [
10]. The lumped parameter model, which is a more general electromechanical model of the electric motor, is therefore pertinent [
11]. Experiments must be conducted to assess this model’s parameters. Since these are primarily static studies, eddy current effects can be disregarded. The estimation of the machine’s performance requires an accurate and suitable procedure to determine the lumped model’s parameters.
The torque estimation is established using a test bench that enables a precise measurement based on rotor’s position. Using various DC currents to supply the phases is one of the primary methods for calculating torque. Single-phase or double-phase current supplies are used while the rotor rotates at a constant speed [
12]. The general electromechanical lumped parameter model, which is the primary foundation of this method, shows that the torque of a permanent magnet motor is equal to the sum of the electromagnetic, saliency and cogging torques [
11]. Measuring torque is extremely difficult because of mechanical constraints, like resonance frequencies. Torque ripples in permanent magnet and switched reluctance motors are intended to be measured by the static torque gauge using force sensors on the rotor [
13,
14] or on the stator [
15,
16]. For the latter, they measure the reaction torque. The flux linkage characteristics of a switched reluctance motor were determined by Song et al., and their assumptions were confirmed through the measurement of the static torque characteristics [
17]. The settlement of the self- and the mutual inductances’ harmonics as a function of rotor position are assessed in [
18]. The parameters of an extended DQ model tailored to motors with non-sinusoidal waveforms are deduced using these harmonics. These parameters are then used to create a Maximum Torque Per Ampere (MTPA) control strategy for these motors in the last stage.
The aim of this article is to present the experimental investigations required to determine the parameters of the electromechanical model of a STAFPM motor produced in the laboratory [
19]. This model will then enable the completion of a DQ model to examine this motor’s behavior when fed by a three-phase current system.
In
Section 2 of this article, the STAFPM prototype is introduced first. In
Section 3, in order to guide the experimental studies, the general electromechanical lumped parameter model is recalled. Then, physical symmetries of the motor are exploited to deduce some properties of the electromechanical parameters, such as the self- and mutual inductances and the no-load magnetic flux. These characteristics enable the establishment of procedures for determining each of the electromechanical model’s parameters. As most of the parameters can be deduced from static torques, an experimental test bench available in the laboratory is presented in
Section 4. Static torque as a function of rotor position can be measured with this test bench.
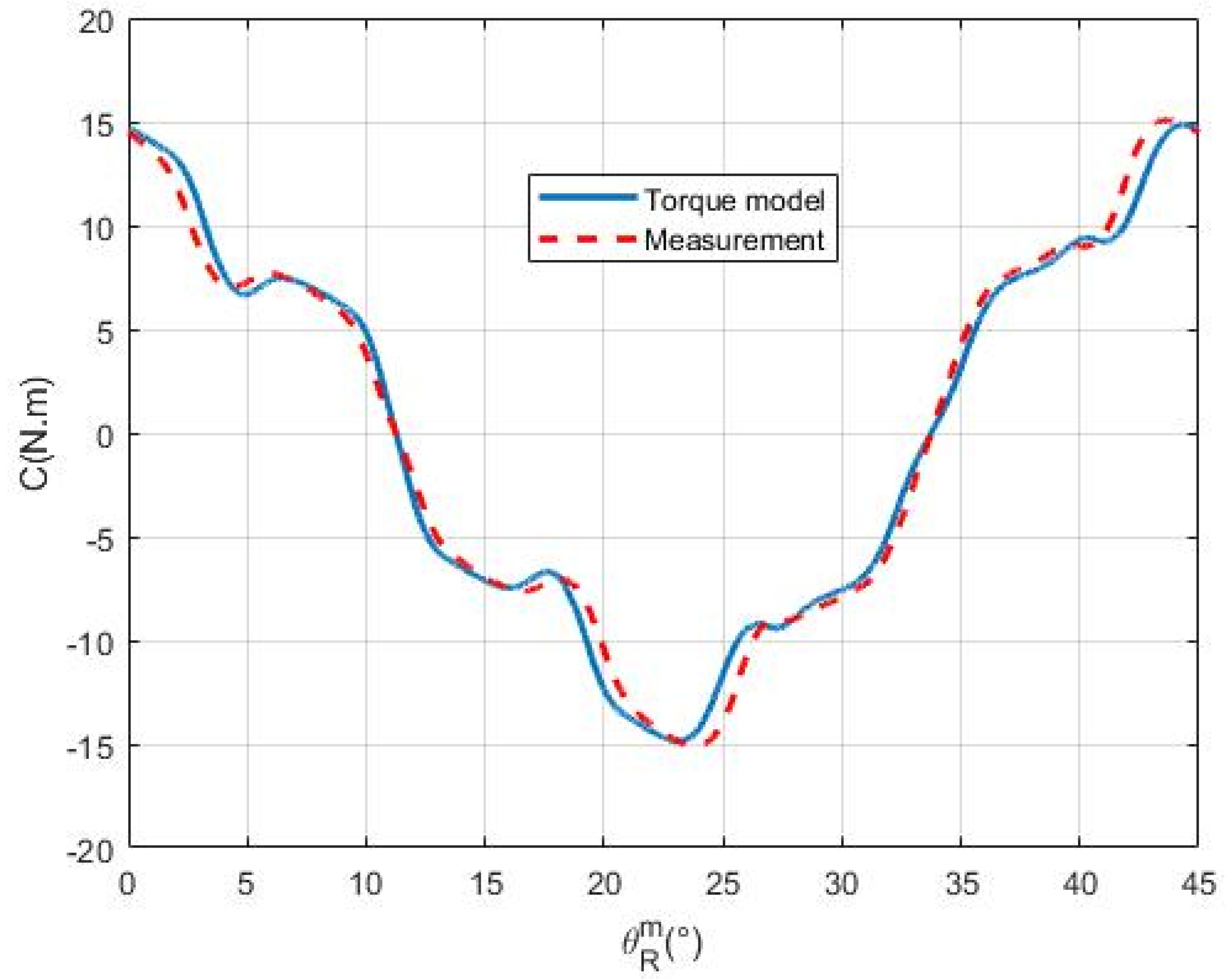
Section 5 presents, step by step, the identification of all the parameters of the electromechanical model. Once the general STAFPM motor model is available, it is validated in
Section 6. This model makes it possible to accurately replicate several significant phenomena, including torque ripples. In
Section 7, this model is used to study the motor’s three-phase sinusoidal supplies. To guide these studies, the parameters of the DQ model are calculated. Some properties of these parameters are highlighted. The optimal torque of the motor is then evaluated. In the Conclusions Section, considerations are presented on the use of the electromechanical lumped parameter model in order to size the STAFPM motor.
2. STAFPM Prototype
The STAFPM motor prototype presented in this section was developed on the basis of the stator magnet circuit of an axial-flux machine [
20]. In this machine, the magnets were surface-mounted on the rotor. The rotor of our prototype was completely new to achieve a spoke-type axial-flux machine, and the stator was rewound with the correct number of winding poles. Details regarding the sizing of this motor can be found in chapter 2 of [
19]. This prototype was not made for an industrial application with defined specifications. Its objective is to highlight the analysis method proposed in this article, namely the tests that must be implemented to establish the electromechanical lumped parameter model.
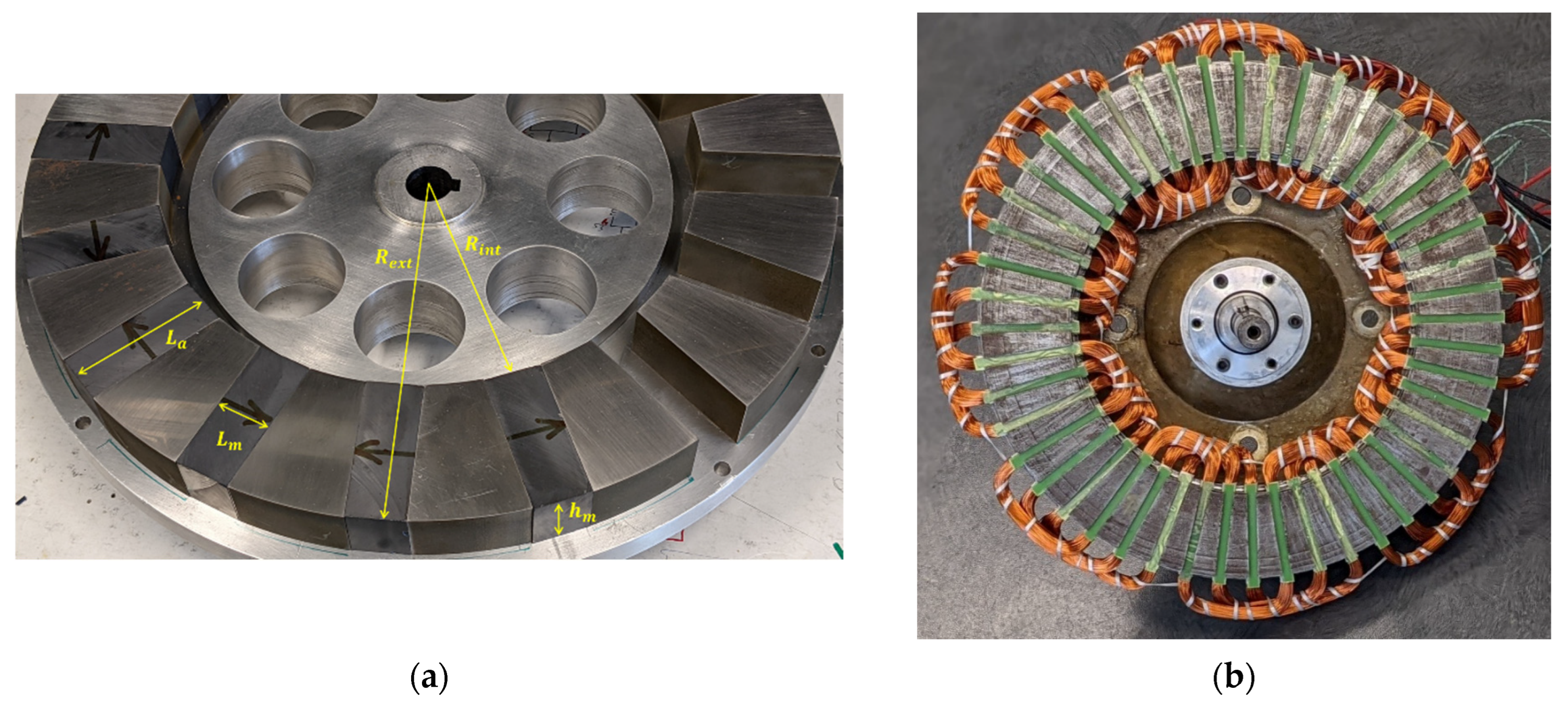
So, the STAFPM prototype is a single-rotor, single-stator, three-phase axial-flux motor. Non-oriented electrical steel of the FeSi “M235-35A” grade with a sheet thickness of 0.35 mm made up the stator’s ferromagnetic material. A ferromagnetic pole piece that concentrates the no-load magnetic flux in the air gap and an azimuthally polarized Ferrite permanent magnet constitute each rotor pole. The prototype’s Ferrite magnets have the following properties:
is the relative magnetic permeability and
is the polarization. The electrical steel XC12 served as the rotor’s ferromagnetic material. Since the total axial thickness was purposefully limited to making handling the prototype easier, the rate of concentration of the no-load magnetic flux in the air gap was equal to 1.15, which is not very strong.
Table 1 and
Figure 1 present the dimensions and photos of the rotor and stator, respectively.
The stator had an integer distributed winding topology with one slot per pole and per phase () and ninety-five conductors per slot . All the conductors per phase were in series. In addition, the number of turns was .
4. Experimental Test Bench
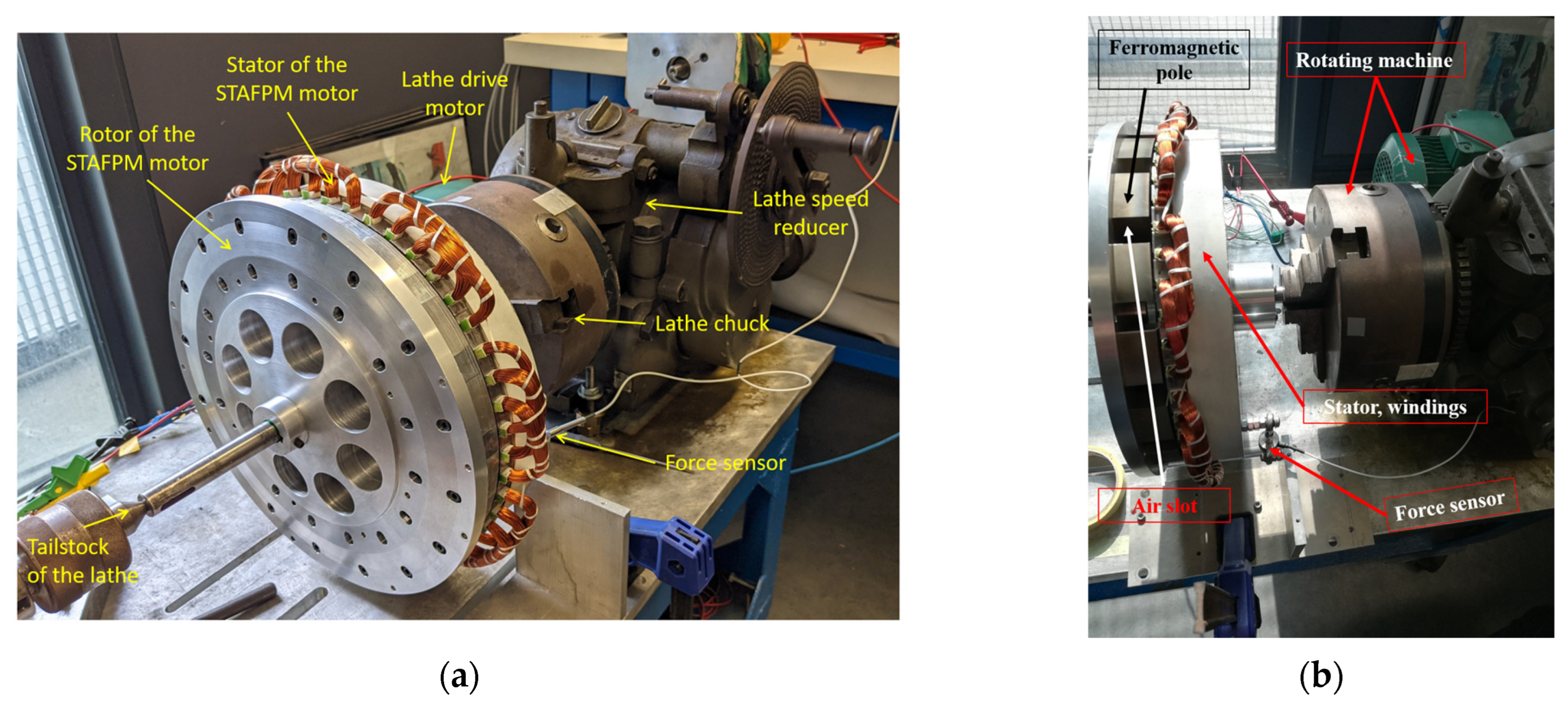
Figure 2a shows the experimental test bench used to measure motor torque as a function of rotor position. The stator was mounted on the bench free to rotate around its bearing. In
Figure 2a, the permanent magnets are mounted on the STAFPM motor, while in
Figure 2b, the permanent magnets are not mounted.
To measure any tangential force
applied to the stator, a force sensor is fitted between the stator and the chassis of the test bench, as shown in
Figure 2b. The force sensor’s application point is situated close to the stator’s outer edge, which is separated from the rotor axis by the following distance:
On the opposite side the load cell application point, weights were positioned on the outer edge of the stator to achieve equilibrium at standstill, so that the measured force was zero.
The force sensor delivers a voltage proportional to the tangential force with a coefficient . Two Entran force sensors were used, depending on the torque value to be measured: a 25 N force sensor (ELPS-T1M-25N, Entran Devices, Fairfield, NJ, USA) and a 100 N force sensor (ELPS-T2M-100N, Entran Devices, Fairfield, NJ, USA). The Full-Scale Output (FSO) was 10 V for 25 N and 10 V for 100 N, which provided the coefficients of 2.5 N/V and 10 N/V, respectively. For the two sensors, the combined non-linearity and hysteresis error was 0.5 % of the FSO and the zero drift was 1 % of the FSO. The Entran MSC6 sensor conditioner (Entran Devices, Fairfield, NJ, USA) measures the voltage , which is then acquired in function of time by a digital oscilloscope.
Due to the action–reaction principle, the torque applied on the rotor
is related to the torque applied on the stator
:
The non-linearity and hysteresis measurement error on the torque with the 25 N sensor was and with the 100 N sensor was .
A drive motor located on the test bench set the prototype’s rotor in motion at a relatively low constant speed (0.29 rpm). This speed was set at the very start of the test. A source of DC current provided the stator winding’s phases. By correctly connecting the phases, as indicated in
Figure 3, three types of supplies can be easily completed.
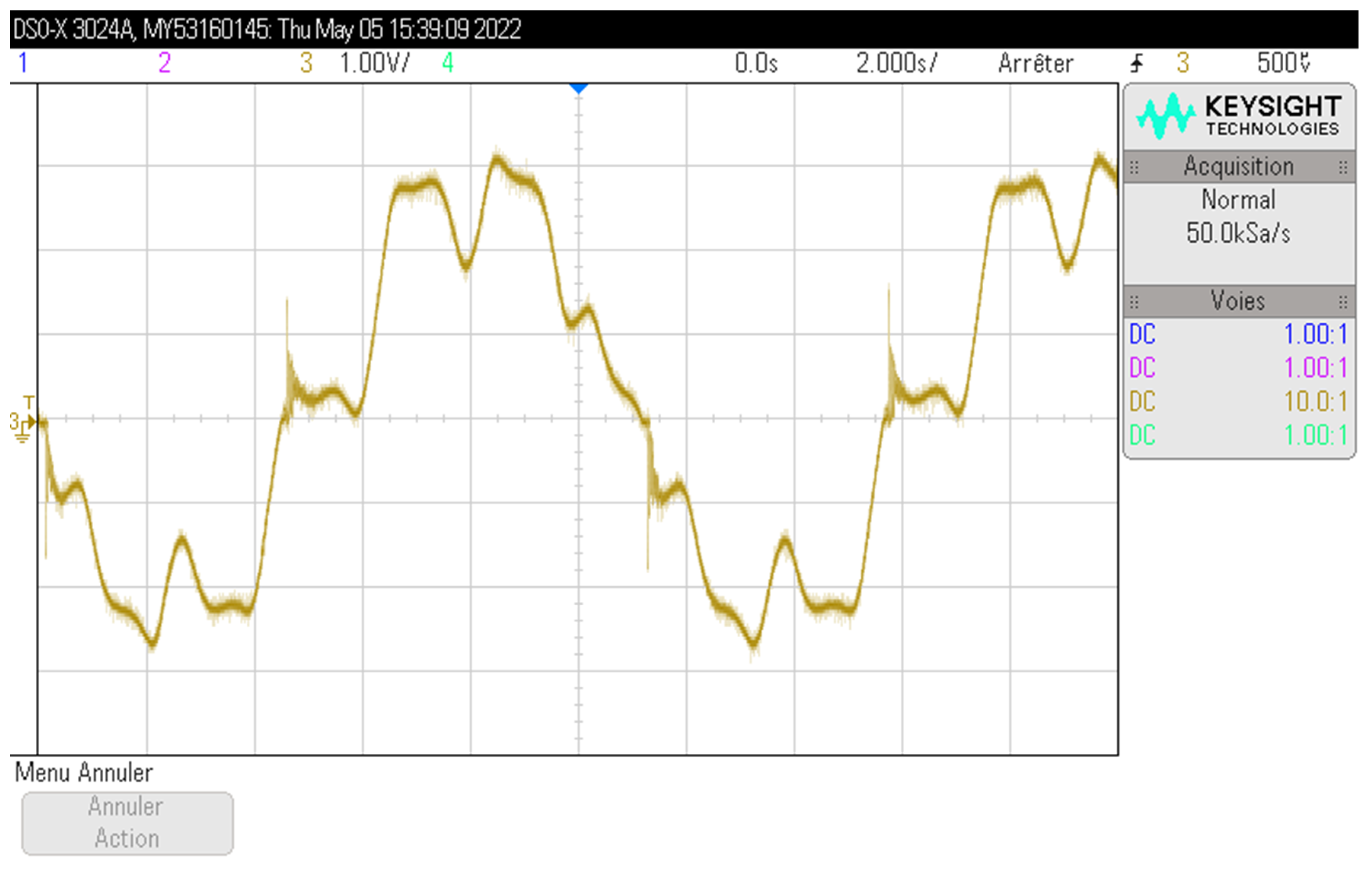
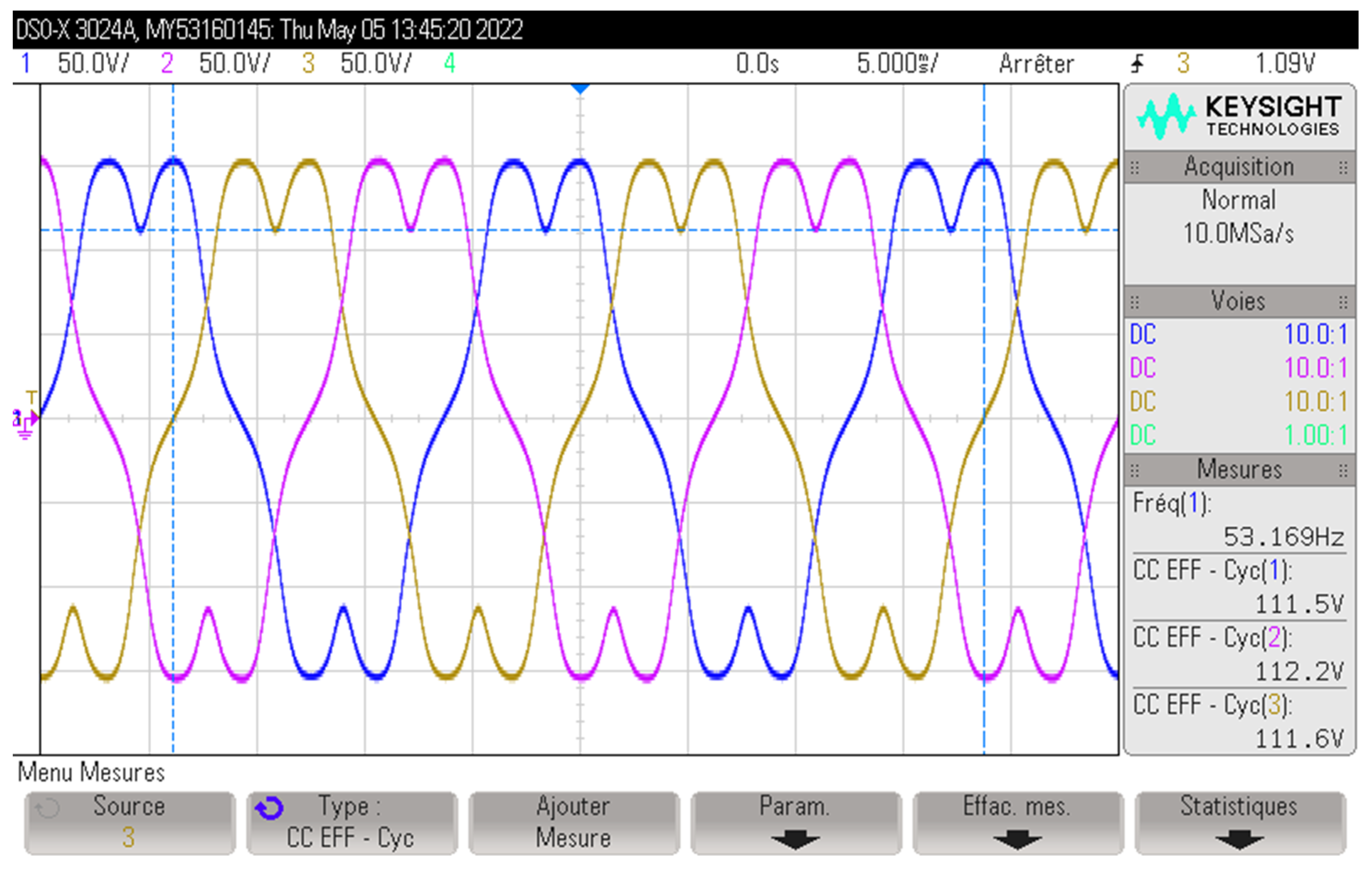
Figure 4 shows an example of the force sensor’s output voltage
as a function of time displayed on an oscilloscope, representing the torque applied to the stator. In this example, the permanent magnets are mounted on the rotor, the stator is supplied by the three-phase supply configuration (
Figure 3c) with
, and the force sensor used is 100 N.
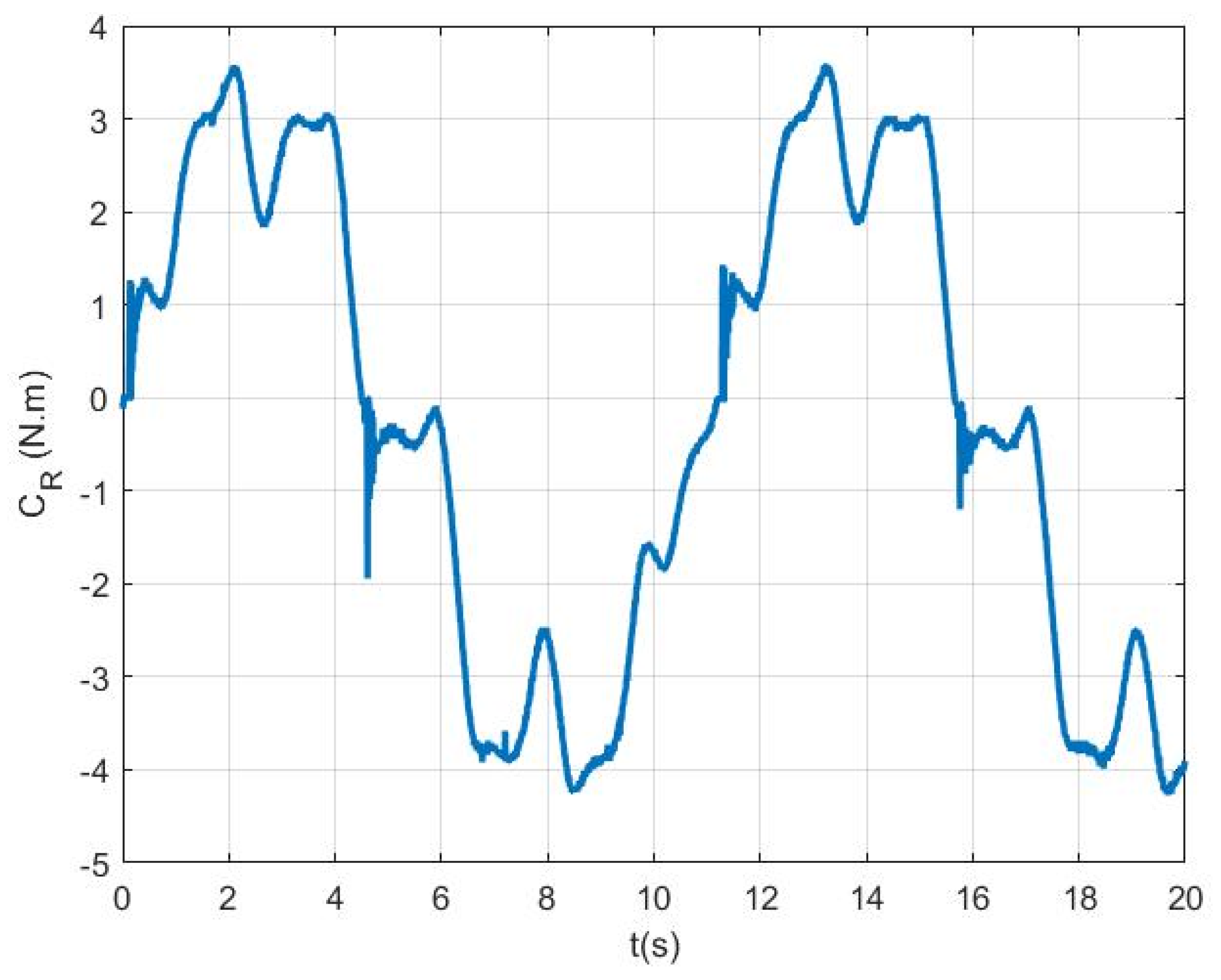
According to (31),
Figure 5 shows the torque applied on the rotor
corresponding to the output voltage
presented in
Figure 4.
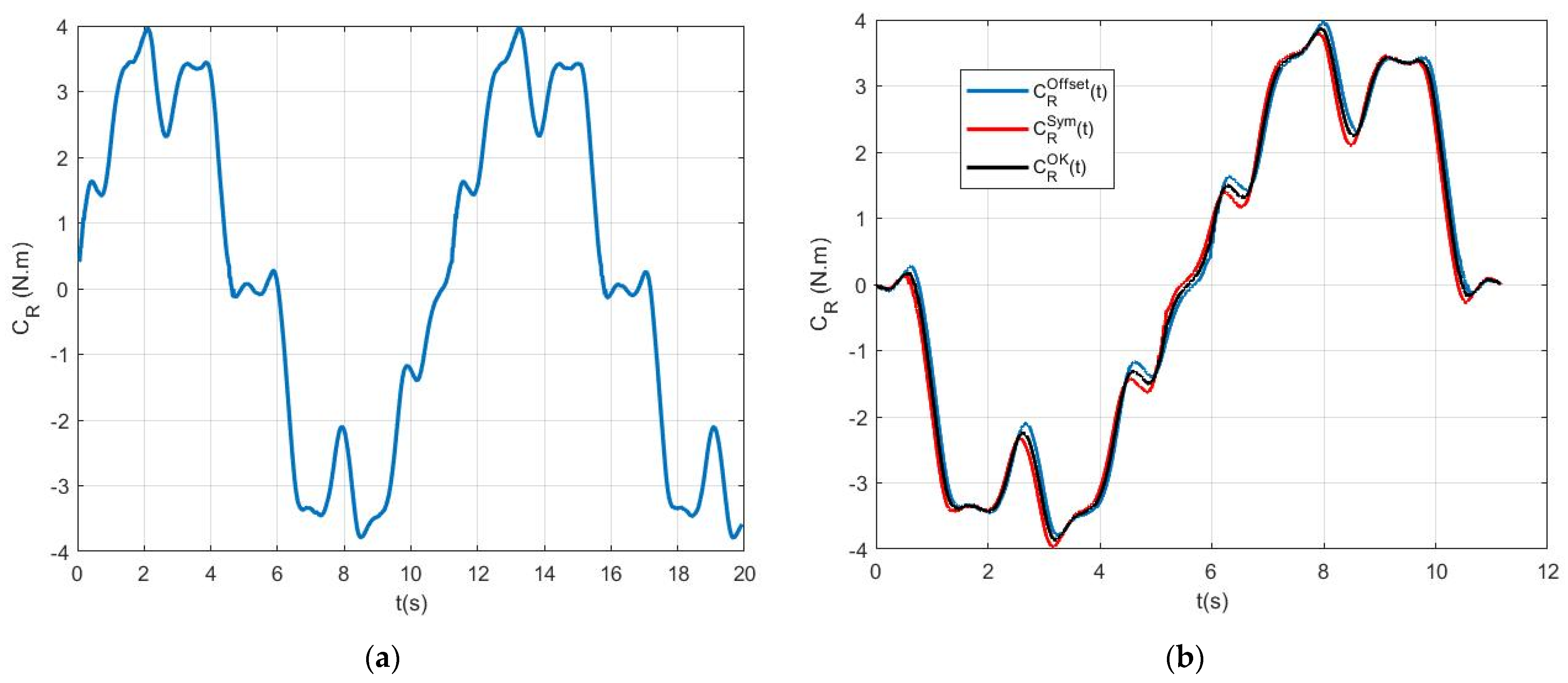
It can be seen that the delivered signal is not perfect and must be treated numerically, with a dedicated MATLAB (R2016b) program.
The first observation is the detection of parasitic noise in the measured torque, which must be filtered. A moving average filter was used to filter the measured signal.
The second observation is that the signal is not symmetric along the vertical axis: the maximal torque value is not opposite its minimal value. It is also not symmetric along the horizontal axis: over a period, the duration of the positive torque is not equal to its negative value. So, an offset was applied to position the horizontal axis at the zero torque level.
Figure 6a shows the resulting
torque. To equalize along the vertical and the horizontal axes, we calculated the torque
symmetrical to
with respect to the point
on the horizontal axis. The final signal
was the average of the two signals
and
. All three signals are shown in
Figure 6b.
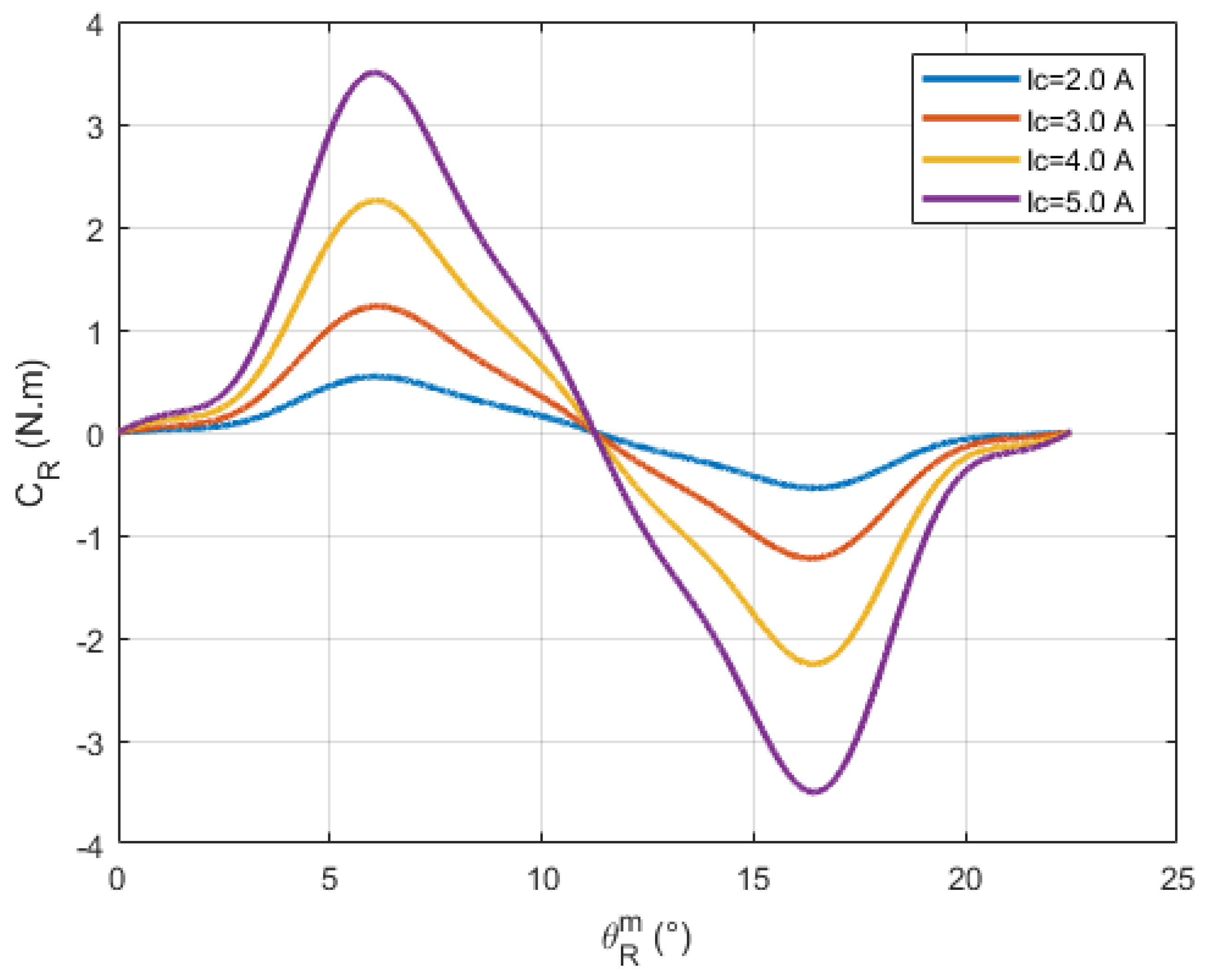
With rotor speed known, the torque can then be plotted as a function of rotor position
over a mechanical period in
Figure 7.
8. Conclusions
The experimental methodology used in this article uses a dedicated test bench to measure the static torque of an electric motor as a function of rotor position. A novel identification approach is proposed to extract most of the parameters for the electromechanical lumped parameter model of the motor directly from static torque measurements, which are conducted under single-phase, double-phase, and three-phase DC excitations. The experimental data allow for the validation of the proposed identification technique and the identified model parameters, as well as the signal processing algorithms used to mitigate measurement artifacts.
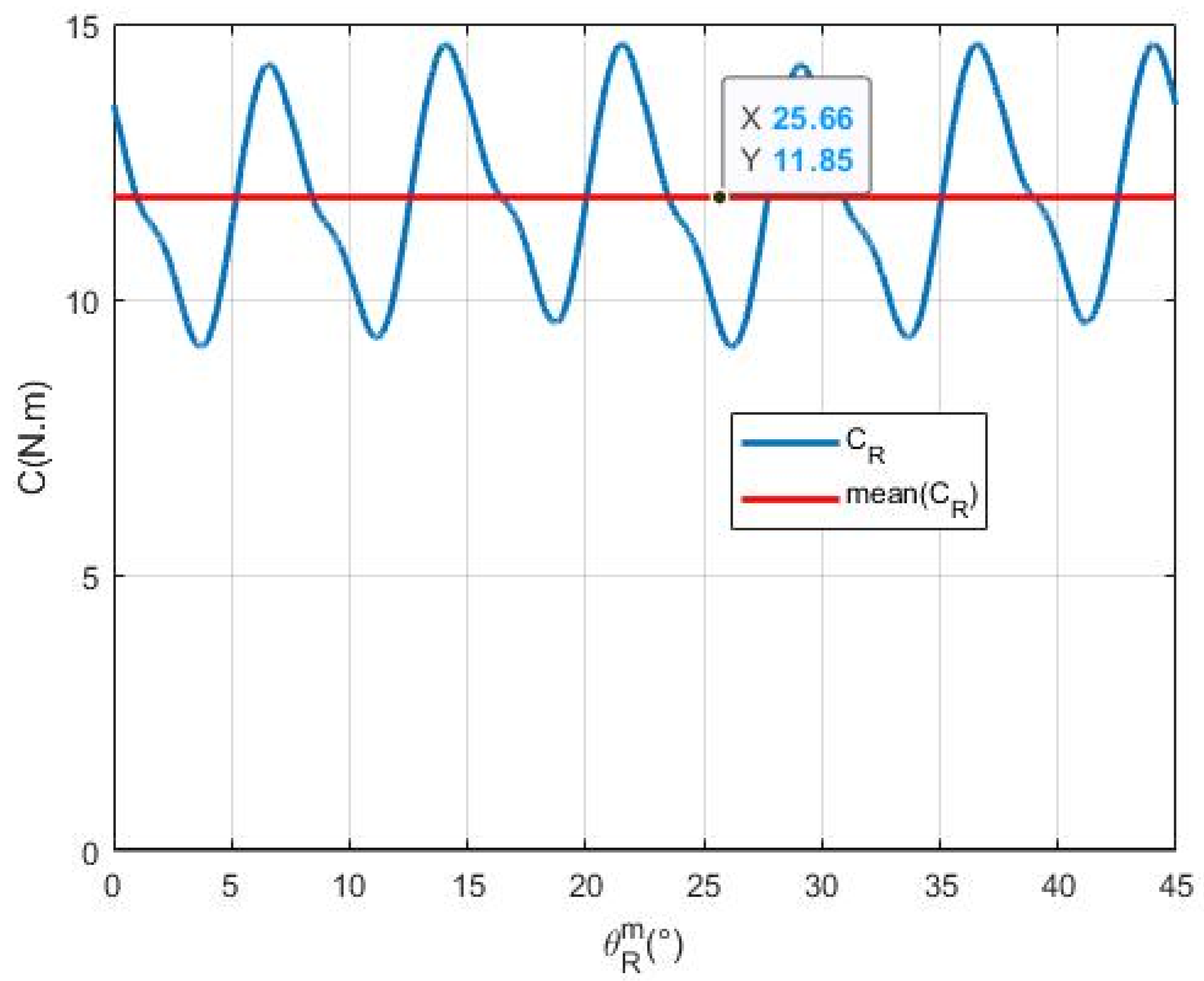
Once the entire set of parameters is established, the general electromechanical model facilitates quick and accurate motor analyses, especially the precise and quick replication of torque ripples. The outcomes demonstrate the benefits and drawbacks of the DQ model, which is the most popular electric motor model. It can precisely determine the mean torque value, but is unable to reproduce torque ripples. The DQ model’s capacity to determine the optimal torque per ampere for STAFPM motors is confirmed by the suggested general model. Consequently, a sizing model that can quickly and precisely determine the DQ model’s parameters is required to size STAFPM motors.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}