
A Practical Short-Circuit Current Calculation Method for Renewable Energy Plants Based on Single-Machine Multiplication


Abstract
1. Introduction
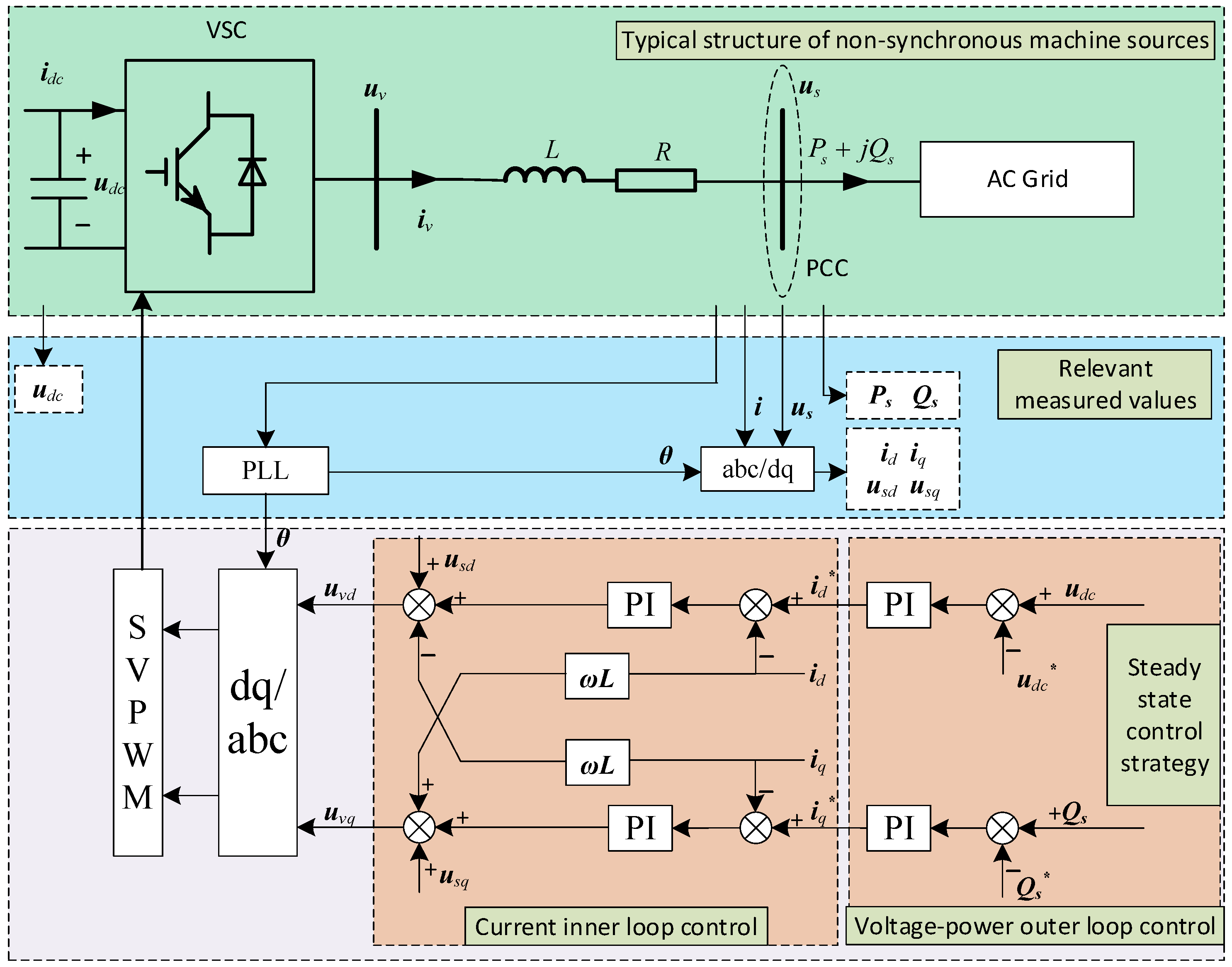
2. The Typical Operating Control Strategies of N-SMSs
2.1. Full-Power Inverter-Based Power Source Control Strategy
- ud and uq are the d- and q-axis components of the inverter bridge output voltage.
- id and iq are the d- and q-axis components of the inverter output current.
- ugd and ugq are the d- and q-axis components of the grid voltage at the connection point.
- L and R are the inductance and resistance of the AC-side filter.
- ω is the synchronous angular velocity.
- P and Q represent the real and reactive power output of the inverter, respectively.
- Ug is the grid-side voltage at the connection point.
- The superscript * represents the controller’s reference value.
- udc is the DC link voltage of the inverter.
- Qs is the reactive power.
- kvP and kvI are the proportional and integral parameters of the voltage outer-loop controller, respectively.
- uvd and uvq are the d- and q-axis components of the inverter bridge output voltage.
- kP and kI are the proportional and integral parameters of the current inner-loop controller, respectively.
2.2. SCC and Voltage Relationship Under Low-Voltage Ride-Through Control Strategy
- ΔIt is the dynamic reactive current increment injected by the wind farm.
- K1 is the proportional coefficient for dynamic reactive current in the wind farm, with a recommended range of no less than 1.5 and preferably no greater than 3.
- Ut is the per-unit voltage at the wind farm grid connection point.
- IN is the rated current of the wind farm.
- P0 is the pre-fault active power;
- U0 is the pre-fault terminal voltage;
- Ue2 is the critical active current voltage.
- Imax is the inverter current limit;
- Id∗ and Iq∗ are the reference values for active and reactive currents, respectively.
3. SCC Calculation Method for Renewable Energy Plants
3.1. Method for Calculating Terminal Voltage
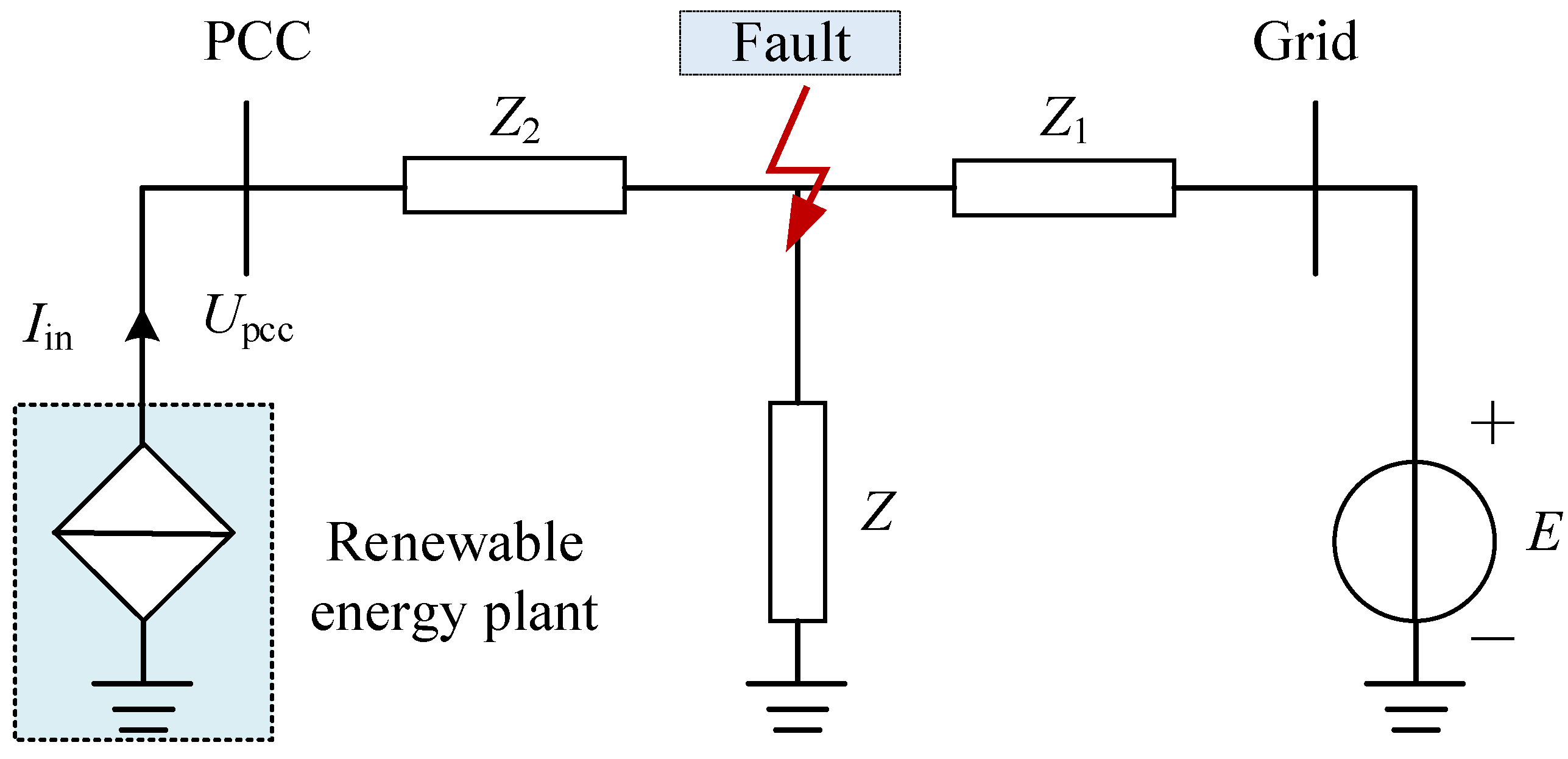
3.1.1. Initial Value Calculation
- Z represents the fault impedance;
- Z1 is the impedance from the fault point to the system;
- Z2 is the impedance from the renewable energy plant to the fault point;
- E is the voltage amplitude of the infinite bus grid;
- Iin is the current injected by the renewable energy plant into the grid connection point during steady-state fault conditions;
- The red arrow indicates the fault location.
- N represents the number of N-SMSs in the renewable energy plant.
- Iin is the rated current of the wind farm.
- (1)
- Number the Internal Lines and Nodes of the Renewable Energy Plant.
- (2)
- Calculate the Fault Steady-State Voltage of Each Node.
- Ni represents the number of N-SMSs at node (i) and its downstream nodes;
- Zi is the impedance of the line between node (i) and node (i − 1);
- IN is the rated current of a single generator;
- Ui − 1 is the fault steady-state voltage at node (i − 1);
- Ui is the fault steady-state voltage at node (i).
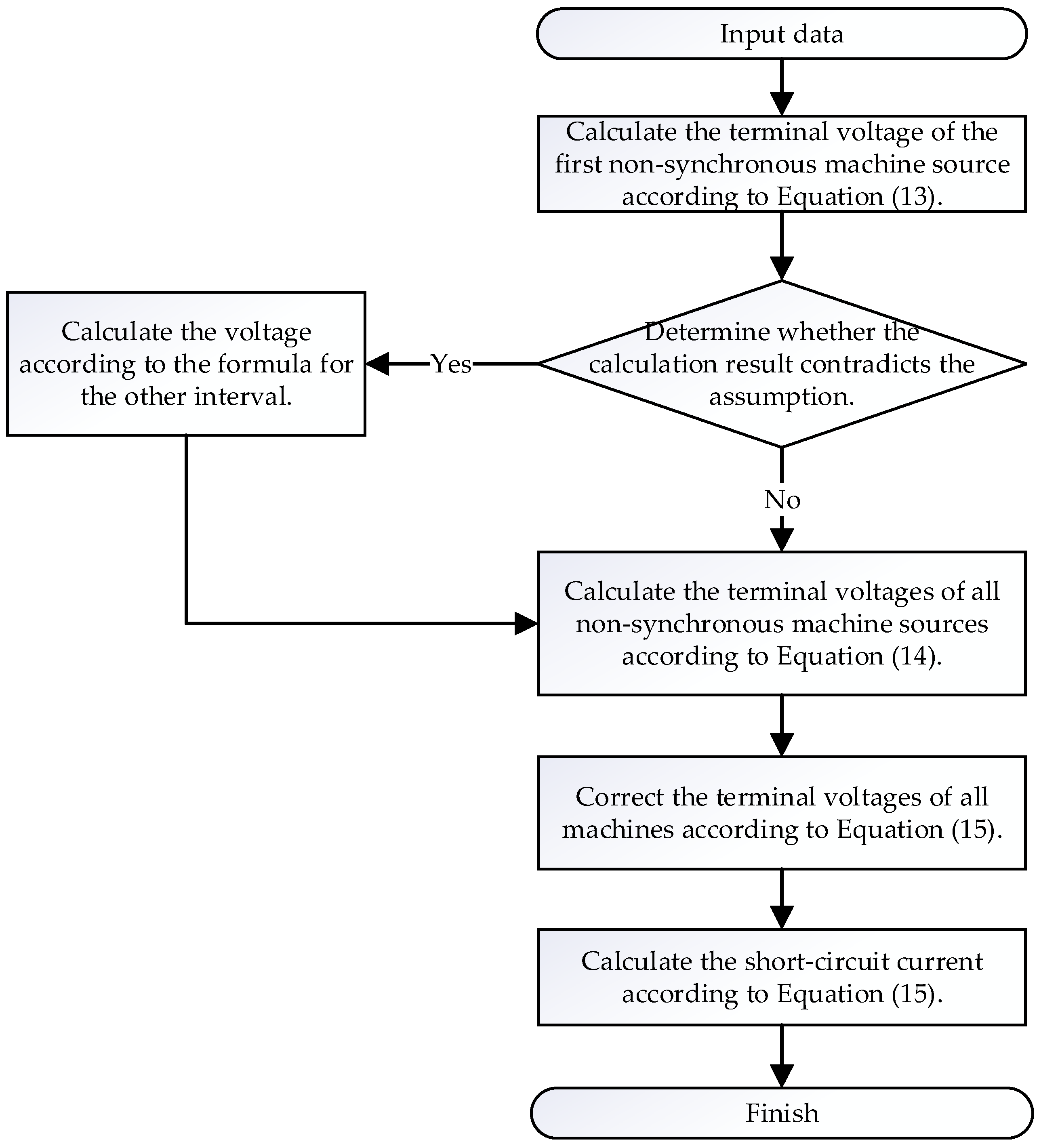
3.1.2. Correction
- Ri and Xi represent the resistance and reactance of the line between node (i) and node (i − 1), respectively.
- Id,j* and Id,j* represent the active and reactive current of the j-th N-SMS, respectively, and can be calculated based on Equation (9).
- i = 0,1,2,…,N, and U0 = Umin.
- I represents the SCC injected by the renewable energy plant into the grid.
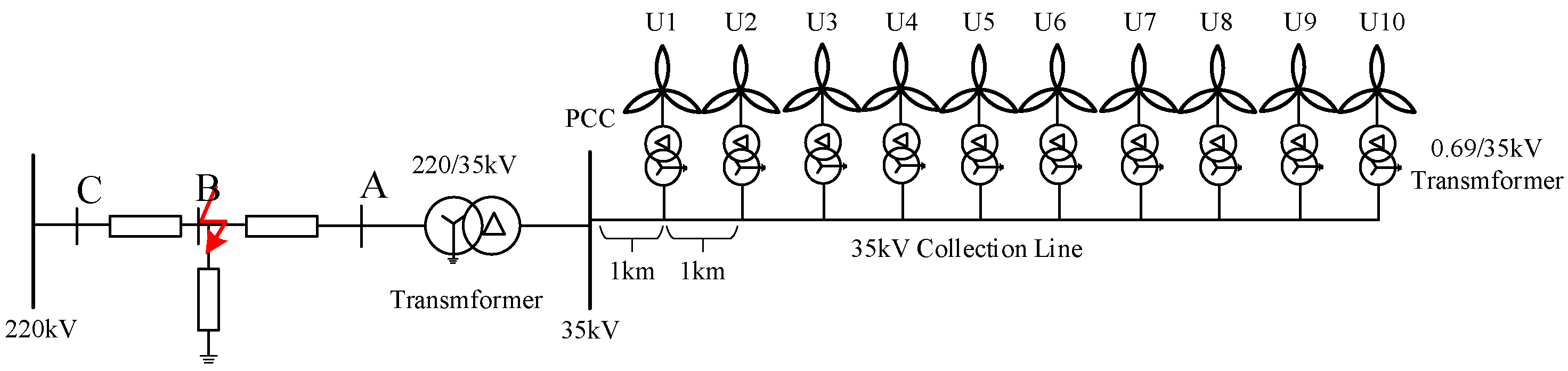
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, M. Characteristic Analysis and Operational Control of Large-Scale Hybrid UHV AC/DC Power Grids. Power Syst. Technol. 2016, 40, 985–991. [Google Scholar] [CrossRef]
- Yang, P.; Liu, F.; Jiang, K.; Mao, H. Large-disturbance stability of power systems with high penetration of renewables and inverters: Phenomena, challenges, and perspectives. J. Tsinghua Univ. (Sci. Technol.) 2021, 61, 403–414. [Google Scholar] [CrossRef]
- Xie, X.; He, J.; Mao, H.; Li, H. New Issues and Classification of Power System Stability with High Shares of Renewables and Power Electronics. Proc. CSEE 2021, 41, 461–475. [Google Scholar] [CrossRef]
- Wei, C. Key Technology Research and Application of Modern Power System Short-Circuit Current Practical Calculation. Dissertation Thesis, Shanghai University, Shanghai, China, 2018. [Google Scholar] [CrossRef]
- Li, T. Calculation of Short Circuit Fault Current in Power System with a Large Number of Inverter-Interfaced Sources. Dissertation Thesis, North China Electric Power University, Beijing, China, 2024. [Google Scholar] [CrossRef]
- Kong, X.; Yuan, Y.; Huang, H.; Zhu, W.; Li, P.; Wang, Y. Fault Current Transient Features and Its Related Impact Factors of PV Generator. Power Syst. Technol. 2015, 39, 2444–2449. [Google Scholar] [CrossRef]
- Xu, K.; Zhang, Z.; Liu, H.; Liu, W.; Ao, J. Study on Fault Characteristics and Its Related Impact Factors of Photovoltaic Generator. Trans. China Electrotech. Soc. 2020, 35, 359–371. [Google Scholar] [CrossRef]
- Fan, X.; An, D.; Sun, S.; Sun, D.; Wang, Y. Three-Phase Short Circuit Current Characteristic Analysis of Doubly Fed Induction Generator Considering Crowbar Protection Action Time. Trans. China Electrotech. Soc. 2019, 34, 3444–3452. [Google Scholar] [CrossRef]
- Linghu, T.; Han, M.; Huo, Q.; Tang, X. Equivalent Modeling of Doubly-Fed Wind Farms Short-Circuit Current Calculation Considering Different Fault Ride-Through Modes. South. Power Syst. Technol. 2022, 16, 28–37. [Google Scholar] [CrossRef]
- Yin, J.; Bi, T.; Xue, A.; Yang, Q. Study on Short-circuit Current and Fault Analysis Method of Hybrid Wind Farm with Low Voltage Ride-through Control Strategy. Trans. China Electrotech. Soc. 2015, 30, 99–110. [Google Scholar] [CrossRef]
- Song, J.; Cheah-Mane, M.; Prieto-Araujo, E.; Gomis-Bellmunt, O. Short-Circuit Analysis of AC Distribution Systems Dominated by Voltage Source Converters Considering Converter Limitations. IEEE Trans. Smart Grid 2022, 13, 3867–3878. [Google Scholar] [CrossRef]
- Jia, K.; Hou, L.; Bi, T.; Li, Y.; Qin, H.; Ding, X. Practical Engineering Calculation of Short-circuit Current for Renewable Energy Based on Local Iteration of Fault Area. Autom. Electr. Power Syst. 2021, 45, 151–158. [Google Scholar] [CrossRef]
- Hong, S.; Fan, C.; Chen, S. Research on Fault Equivalence Method for Multiple Inverter-Interfaced Distributed Generation Based on PQ Control Strategy. Power Syst. Technol. 2018, 42, 1101–1109. [Google Scholar]
- Jin, Y.; Wu, D.; Ju, P.; Rehtanz, C.; Wu, F.; Pan, X. Modeling of Wind Speeds Inside a Wind Farm with Application to Wind Farm Aggregate Modeling Considering LVRT Characteristic. IEEE Trans. Energy Convers. 2020, 35, 508–519. [Google Scholar] [CrossRef]
- Wu, Z.; Cao, M.; Li, Y. An Equivalent Modeling Method of DFIG-based Wind Farm Considering Improved Identification of Crowbar Status. Proc. CSEE 2022, 42, 603–614. [Google Scholar] [CrossRef]
- Mi, Z.; Su, X.; Yang, Q.; Wang, Y. Multi-Machine Representation Method for Dynamic Equivalent Model of Wind Farms. Trans. China Electrotech. Soc. 2010, 25, 162–169. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, D. Equivalence of wind farms with DFIG based on two-step clustering method. Power Syst. Prot. Control 2017, 45, 108–114. [Google Scholar] [CrossRef]
- Ye, L.; Shi, Y.; Wang, W.; Peng, Y.; Pei, M. Multi-step Grouping and Equivalent Modeling of Distributed Photovoltaic Clusters for Transient Analysis. Autom. Electr. Power Syst. 2023, 47, 72–81. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, L.; Hsieh, T.Y.; Lee, W.J. A Multistage Dynamic Equivalent Modeling of a Wind Farm for the Smart Grid Development. IEEE Trans. Ind. Appl. 2019, 55, 4451–4461. [Google Scholar] [CrossRef]
- Qi, J.; Li, W.; Cao, P.; Li, Z. Practical equivalent method for direct-driven wind farm. Electr. Power Autom. Equip. 2022, 42, 50–57. [Google Scholar] [CrossRef]
- Han, W.; Liu, S.; Xiao, C.; Liu, Y.; Song, C.; Wang, Z. Steady short-circuit calculation model for a photovoltaic station considering different generation units’ fault characteristics. Power Syst. Prot. Control 2021, 49, 129–135. [Google Scholar] [CrossRef]
- Li, P.; Huang, Y.; Wang, G.; Li, J.; Lu, J. A Short-Circuit Current Calculation Model for Renewable Power Plants Considering Internal Topology. Appl. Sci. 2024, 14, 10745. [Google Scholar] [CrossRef]
- GB/T 19963.1-2021; Technical Specification for Connecting Wind Farm to Power System; Part 1: On Shore Wind Power. Publisher Standards Press of China: Beijing, China, 2021.
- Tang, Y.; Song, G.; Hao, Z.; Jiang, J.; Chang, N.; Lang, X. Practical Calculation Method for Fault Steady-state Current in Inverter-interfaced Generator Stations. Autom. Electr. Power Syst. 2024, 48, 182–191. [Google Scholar]
- Sun, H.; Li, J.; Li, W.; Guo, J.; An, N.; Zhang, Y. Research on Model Structures and Modeling Methods of Renewable Energy Station for Large-scale Power System Simulation (II): Electromechanical Transient Model. Proc. CSEE 2023, 43, 2190–2202. [Google Scholar] [CrossRef]
- Li, D.; Shen, C.; Wu, L.; Chen, X.; Yang, Y. Study on Fault Response Characteristics Classification and Discriminant Method of PMSG Considering Initial Wind Speed and Drop Degree of Terminal Fault Steady-state Voltage. Proc. CSEE 2024, 44, 1247–1260. [Google Scholar] [CrossRef]
- Yang, Y. Study on Topology Structure of Large Wind Power Base. Dissertation Thesis, North China Electric Power University, Beijing, China, 2017. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Value |
|---|---|---|
| 35 kV line | Impedance | 0.13 + 0.23 jΩ/km |
| Box-type transformer | Transformation ratio | 0.69/35 kV |
| Capacity | 2.24 MW | |
| Impedance | 6.39% | |
| Main transformer | Transformation ratio | 35/220 kV |
| Capacity | 100 MW | |
| Impedance | 13.54% |
| Parameter | Value |
|---|---|
| Generator-rated MVA | 2.2419/MVA |
| Machine-rated angular speed | 314.15927/rad/s |
| Rotor radius | 41.2/m |
| Rotor area | 5333/m2 |
| Air density | 1.229/kg/m3 |
| Gearbox efficiency | 1.0/pu |
| Short-Circuit Impedance/Ω | Maximum Wind Turbine Voltage Relative Error/% |
|---|---|
| 1 | 0.99 |
| 2 | −1.48 |
| 3 | −1.59 |
| 4 | −2.25 |
| 5 | −2.73 |
| 6 | −3.05 |
| 7 | −3.35 |
| 8 | −3.55 |
| Short-Circuit Impedance/Ω | Simulation Value/kA | Single-Machine Multiplication Calculation Value/kA | Single-Machine Multiplication Relative Error/% | Iterative Method Calculation Value/kA | Iterative Method Relative Error/% | Proposed Method Calculation Value/kA | Proposed Method Relative Error/% |
|---|---|---|---|---|---|---|---|
| 1 | 0.0635 | 0.0616 | −3.02 | 0.0624 | −1.76 | 0.0616 | −3.02 |
| 2 | 0.0627 | 0.0616 | −1.80 | 0.0621 | −1.01 | 0.0612 | −2.44 |
| 3 | 0.0617 | 0.0616 | −0.14 | 0.0611 | −0.95 | 0.0609 | −1.27 |
| 4 | 0.0545 | 0.0574 | 5.32 | 0.0547 | 0.37 | 0.0545 | 0.00 |
| 5 | 0.0495 | 0.0519 | 4.92 | 0.0495 | 0.07 | 0.0496 | 0.27 |
| 6 | 0.0459 | 0.0479 | 4.39 | 0.046 | 0.25 | 0.0461 | 0.47 |
| 7 | 0.0429 | 0.045 | 4.83 | 0.0433 | 0.87 | 0.0436 | 1.57 |
| 8 | 0.0412 | 0.0429 | 4.13 | 0.0415 | 0.73 | 0.0418 | 1.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Lu, J.; Li, P.; Huang, Y.; Wang, G. A Practical Short-Circuit Current Calculation Method for Renewable Energy Plants Based on Single-Machine Multiplication. Electricity 2025, 6, 7. https://doi.org/10.3390/electricity6010007
Li J, Lu J, Li P, Huang Y, Wang G. A Practical Short-Circuit Current Calculation Method for Renewable Energy Plants Based on Single-Machine Multiplication. Electricity. 2025; 6(1):7. https://doi.org/10.3390/electricity6010007
Chicago/Turabian StyleLi, Jianhua, Jianyu Lu, Po Li, Ying Huang, and Guoteng Wang. 2025. "A Practical Short-Circuit Current Calculation Method for Renewable Energy Plants Based on Single-Machine Multiplication" Electricity 6, no. 1: 7. https://doi.org/10.3390/electricity6010007
APA StyleLi, J., Lu, J., Li, P., Huang, Y., & Wang, G. (2025). A Practical Short-Circuit Current Calculation Method for Renewable Energy Plants Based on Single-Machine Multiplication. Electricity, 6(1), 7. https://doi.org/10.3390/electricity6010007