1. Introduction
Since 2010, there has been a 40% increase per year in the global car stock for electric vehicles (EVs) [
1]; however, since 2019 EV sales have slowed and the COVID-19 pandemic has affected the entire car market. Against this difficult market backdrop, in 2020, EVs accounted for 4.2% of global car sales [
2], and this was mainly due to supportive polices that several countries worldwide have adopted over the last several years and continue to introduce.
In an effort to increase the sale of EVs and reduce fuel demand, European governments have introduced purchase incentives [
3] for EV owners, reducing the large up-front cost of owning an EV.
In alignment, the research community is also focusing on proposing system-wide strategies and architectures that foster transport electrification via economic incentives for the involved parties and the diverse roles comprising the EV ecosystem. For instance, ref [
4] focused on minimizing the energy consumption costs of EVs, thus mainly serving the owner; ref [
5,
6] proposed price incentive-based charging strategies that benefit both the EV owner and charging station owner. In [
7], a contract-based model that promises benefits for the three interacting parties (i.e., the EV owner, the EV fleet operator, and the aggregator) is presented. The work in [
8] aimed to optimize profits for the charging station owner and that in [
9] for the operator of multi-energy systems.
EVs need to be connected to the energy grid to charge their batteries. The consumption of the energy stored in their batteries mainly depends on the consumption of the vehicle when it is moving at a certain speed. According to [
10], there are three main charging strategies: uncontrolled charging (UCC), external charging strategies (ECS), and individual charging strategies (ICS). Each strategy relates to the options provided to users during a day, and most of them facilitate the network as they can employ price changes or motivate drivers to charge EVs at different times in order to properly and smoothly use energy without overloading the system, i.e., controlling electricity consumption through demand response [
11].
This paper reports original work that was conducted in the context of the EU HORIZON 2020 project MERLON (Integrated Modular Energy Systems and Local Flexibility Trading for Neutral Energy Islands) [
12]. It studied price sensitive ICS strategies where plug-in hybrid electric vehicle (PHEV) users decided on the charging strategy along with the associated parameters involved. Specifically, it provides insights and useful rules of thumb on how a PHEV owner can make decisions regarding the charging of their vehicle in the context of the proposed strategies. This causes charging patterns to change due to the variations in electricity during the day; the user may choose to charge his vehicle based on a lower price. Note that this kind of charging strategy allows people to have control over the charging of their vehicle, as a result users’ hesitation in adopting controlled charging, which has been shown to improve grid voltage [
13], grid losses [
14], and charging costs [
15]. Note that relevant work targeting EVs has also been carried out by other EU funded projects such as the COMPILE project [
16].
The remainder of this paper is organized as follows:
Section 2 describes the simulation platform along with the specifics of the price sensitive strategies proposed,
Section 3 analyzes the results with respect to the different system parameters,
Section 4 discusses the results and, finally,
Section 5 concludes this work, summarizing guidelines for the optimized selection of parameters that lead to minimized costs for the PHEV user.
3. System Analysis Results
Our analysis started with the results for scenario 2 only, and building on these results, further improvements were examined at a later stage in scenario 3 with the V2G option enabled.
Figure 5,
Figure 6 and
Figure 7 present the key outputs of the simulation platform, i.e.,
,
, and
for different price threshold coefficients (
) and
values when
scenario 2 was employed by the user. Note that the results corresponding to
are identical to those of
scenario 1 (reference scenario)
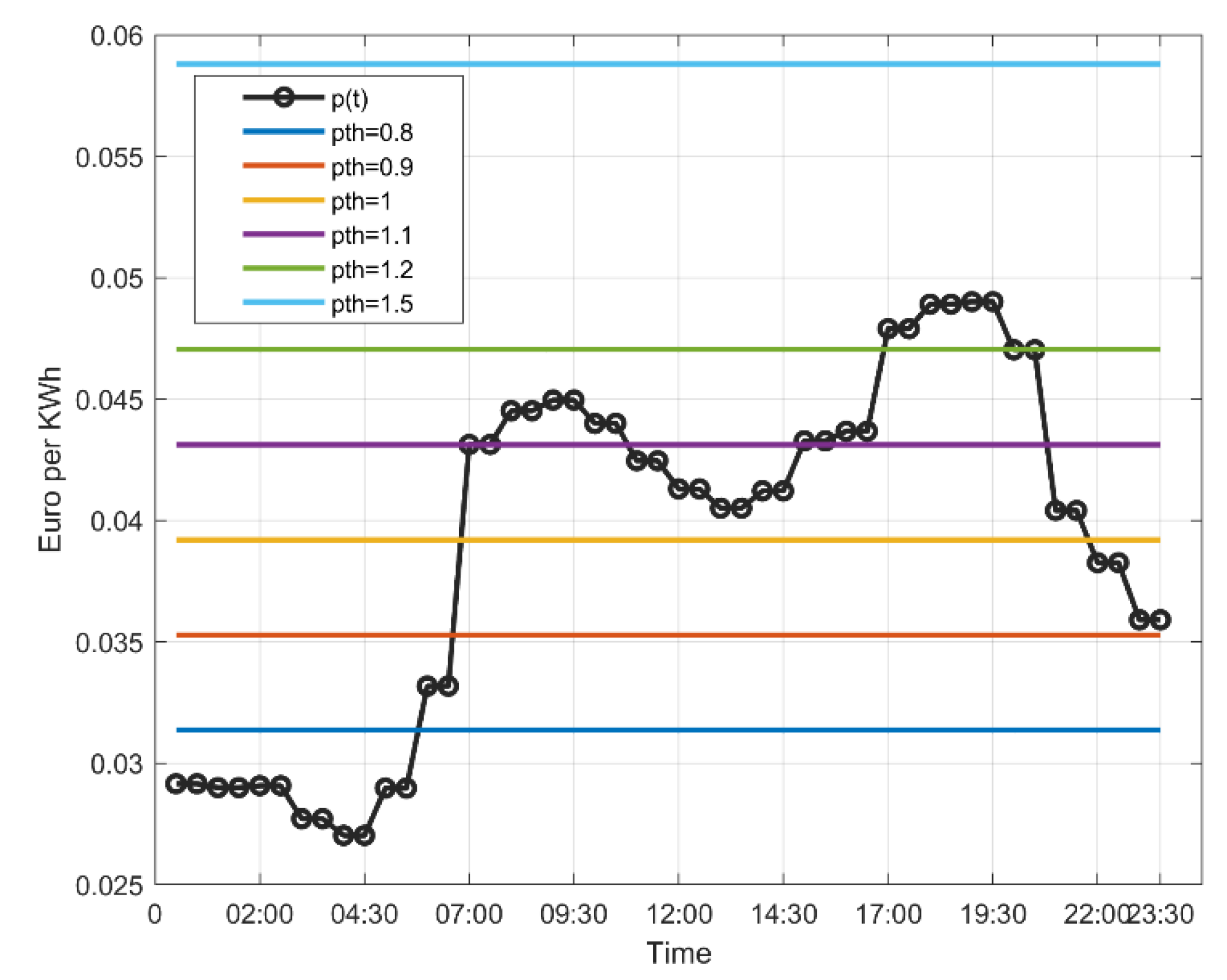
, since (see
Figure 1) the relevant price threshold was higher than the maximum value of
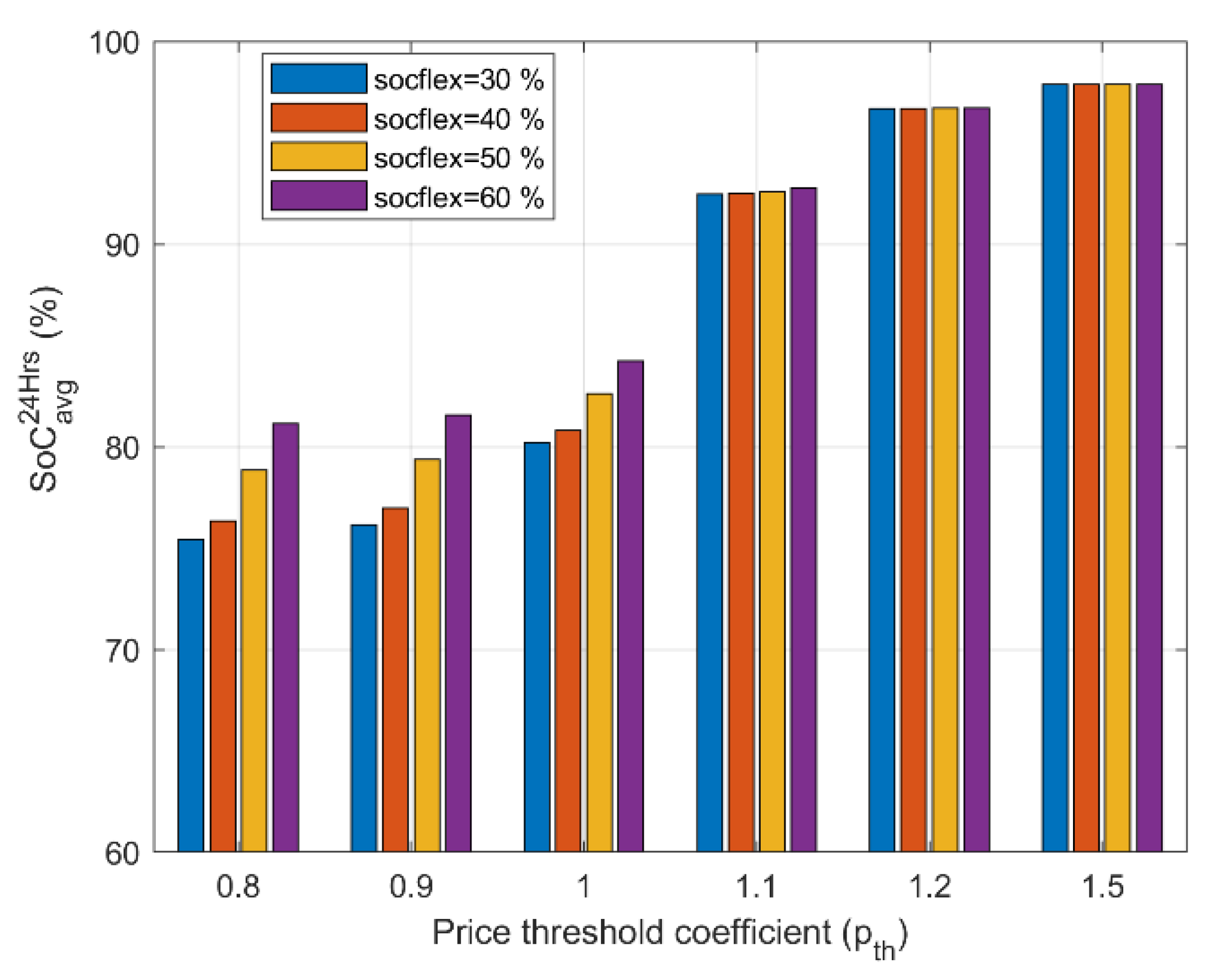
. For an average driving speed of 30 km/h,
Figure 5 shows that lower price thresholds (
) lead to lower average SoC levels per PHEV, since charging after
is allowed only in periods when
. However, SoC values will not drop lower than 75% for any configuration. For the same
, the average SoC level is affected by
in a very straightforward manner: by lowering
, fewer charging sessions are initiated.
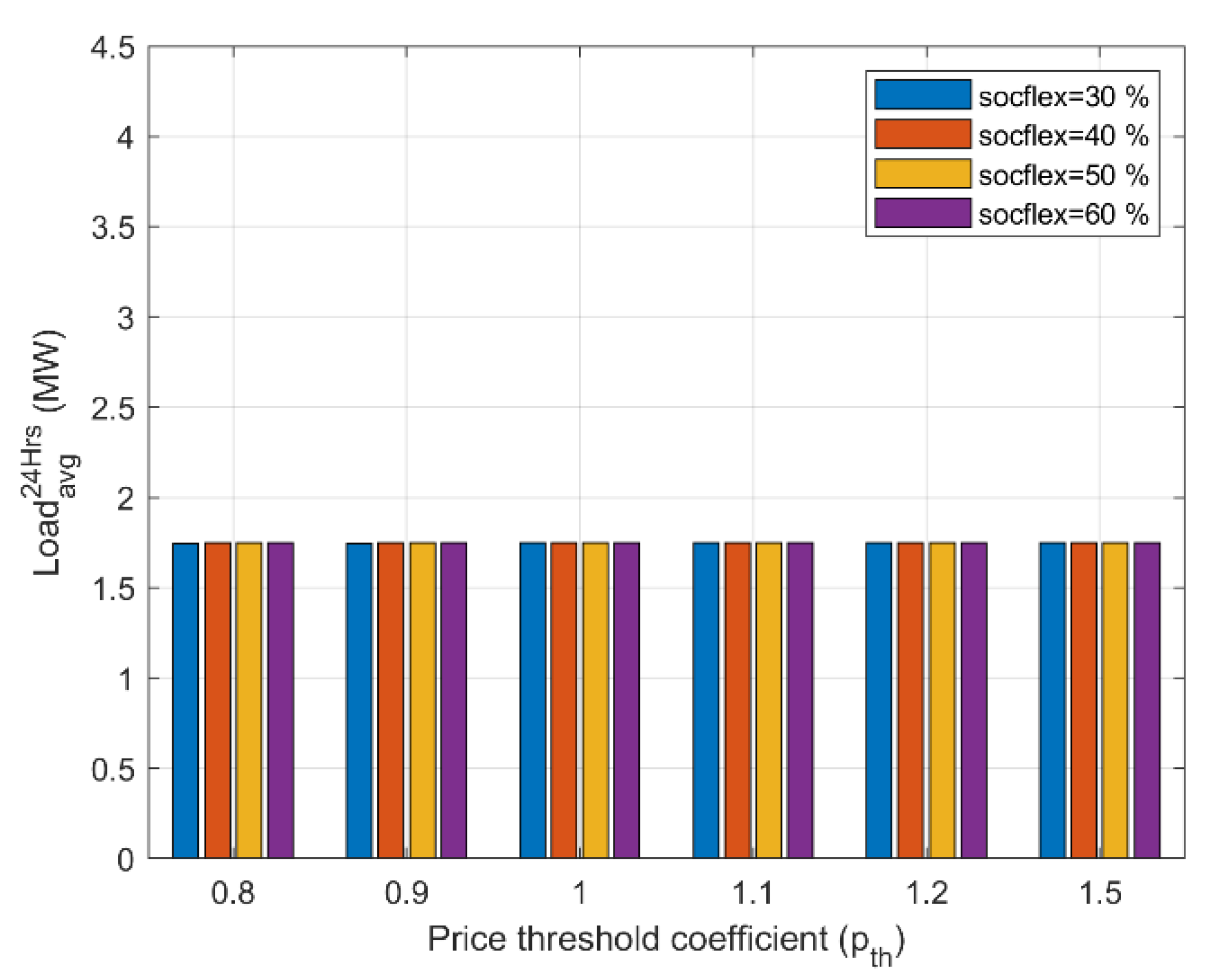
Figure 6 displays the average load over 24 h that was generated at the energy network side due to the. PHEVs’ charging needs. As can be seen, the load remained constant for the different parameters, leading to the conclusion that by employing a price-sensitive charging strategy, the average load during a specific period of time (herein 24 h) remains unaffected; the network received no additional load. Finally,
Figure 7 displays the total cost per PHEV as defined in (6). Clearly,
scenario 1 (
pth = 1.5) involved higher costs for the PHEV owner.
The previous analysis considers only u = 30 km/h and triggered the need to investigate the performance of scenario 2 under different driving needs. Therefore, the optimal values for and that lead to the minimum total costs for different driving speeds are determined next.
An extensive study was held, and multiple setups were examined with respect to
.
Table 2 summarizes the values used for the three input parameters (i.e.,
u,
, and
) during this study, i.e., 192 setups were simulated.
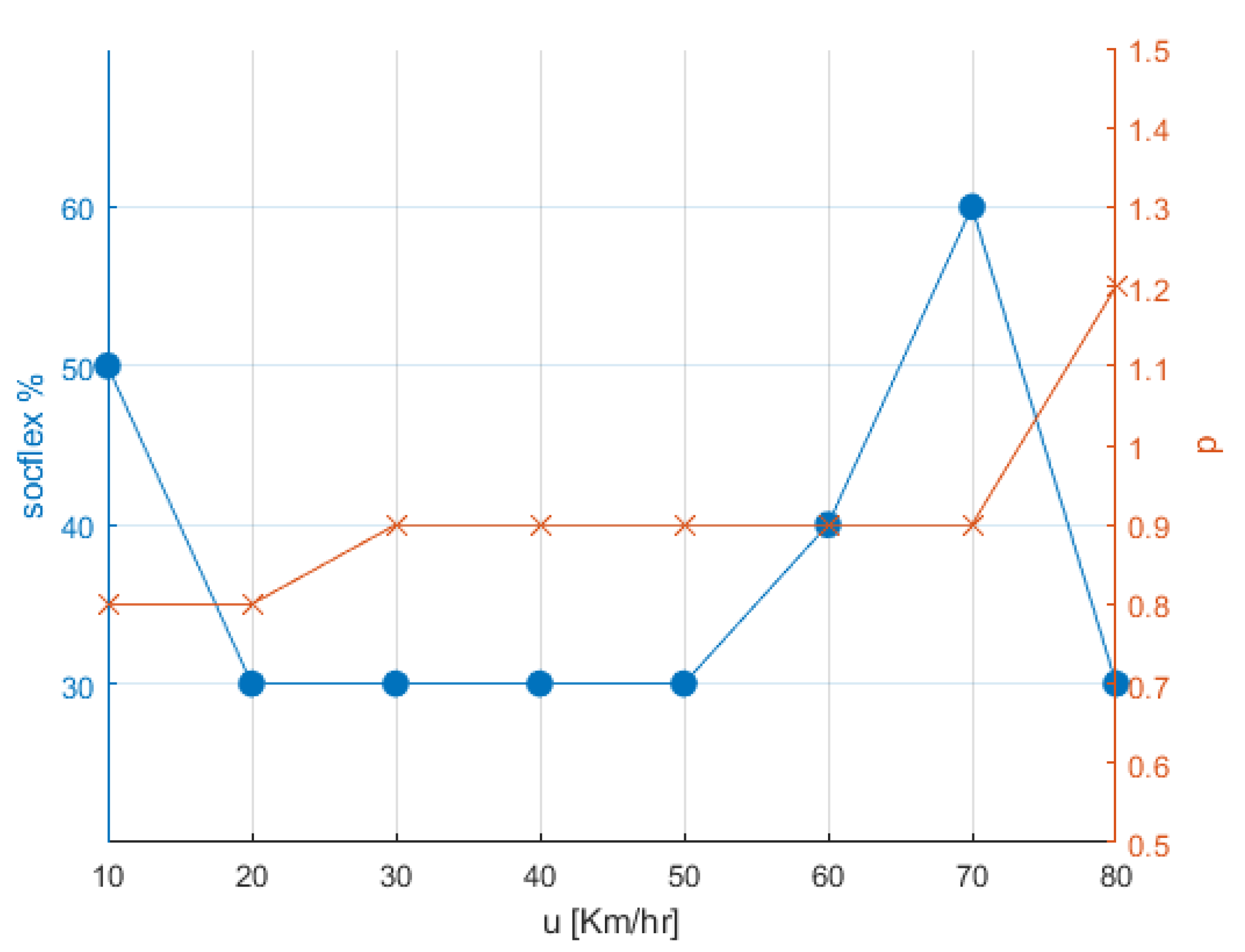
Figure 8 shows the optimized values for
and
for each speed that led to the minimum total cost for the PHEV user. These optimized values were derived after several simulations combining all possible choices from
Table 2. For example, for a speed equal to 30 km/h, the optimal
was 0.9 and the optimal
was 30%, which also applies to speeds of 40 and 50 km/h. Note that for an excessive driving speed as high as 80 km/h, the system requires a large price threshold coefficient (
pth = 1.2), indicating an increased charging need for PHEVs.
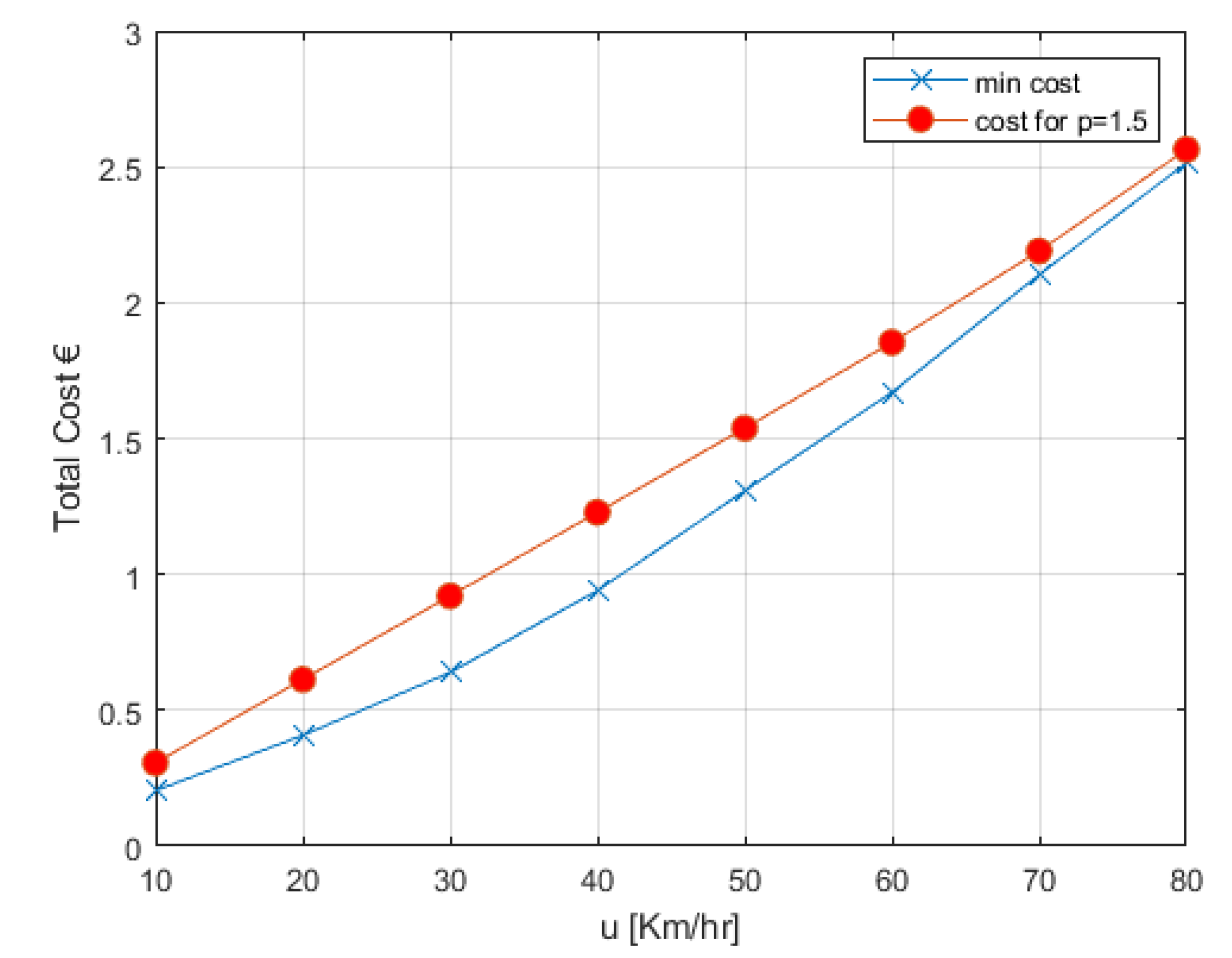
Using the optimal values from
Figure 8, the total cost is shown in
Figure 9 for both
scenario 2 and
scenario 1, i.e., for
. A higher cost gain, approximately 34%, was shown for 20 km/h. For higher driving speeds, the cost gain gradually dropped to ~31% for 30 km/h, ~23% for 40 km/h, and reaching a practically insignificant value of 2% for 80 km/h.
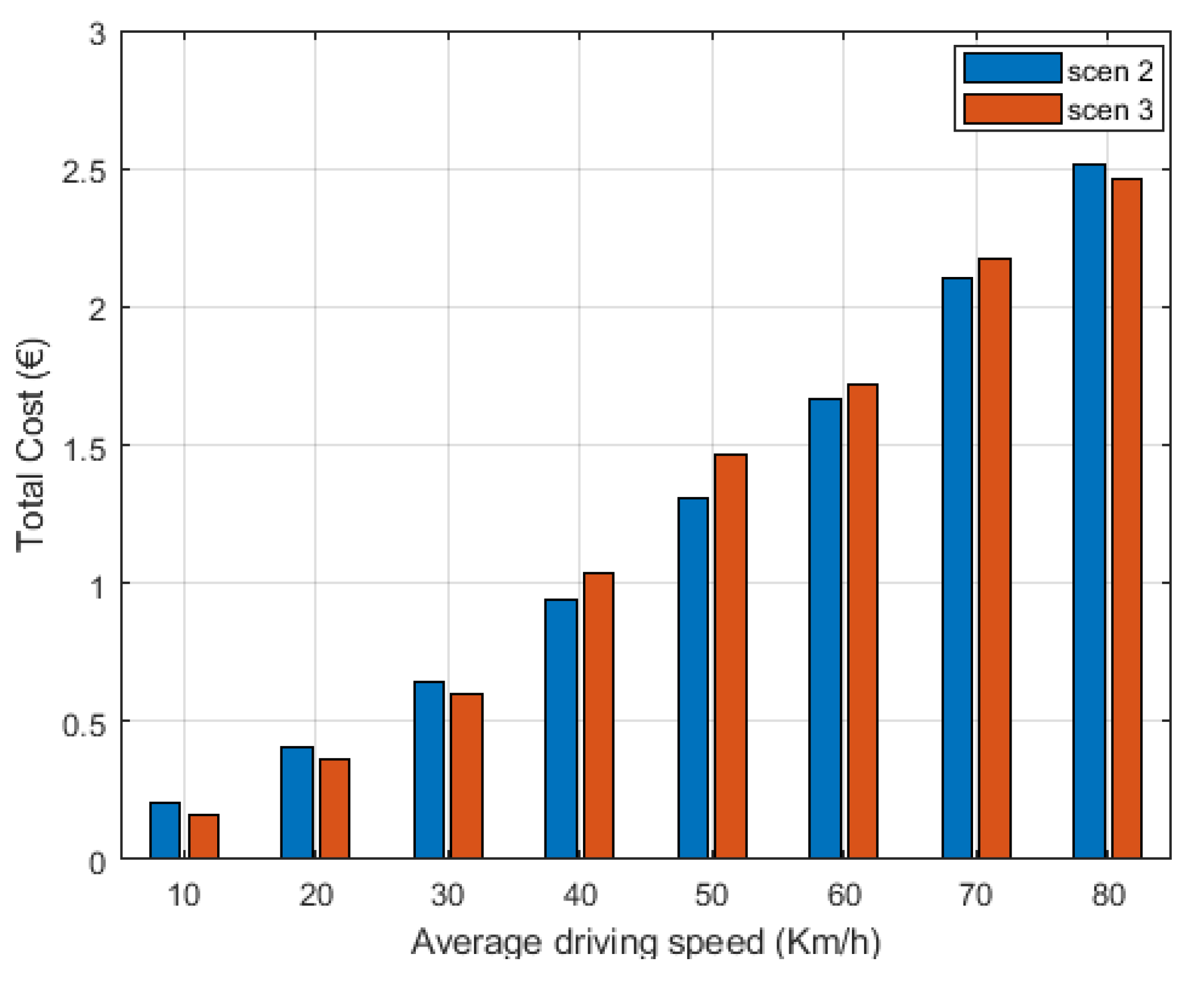
Next, the last charging policy that was built upon the V2G concept was investigated, again with respect to the total cost that the PHEV user is charged. Since the consideration of the V2G option was added to the already established design of
scenario 2, the conclusions drawn so far regarding the optimal values for the price threshold and the
were used as the basis for evaluating the value of
scenario 3. Thus, the optimal values for
and
(
Figure 8) that led to the lowest cost for
scenario 2 were now applied in
scenario 3, so that a comparison could be made between
scenario 2 and
3 as shown in
Figure 10.
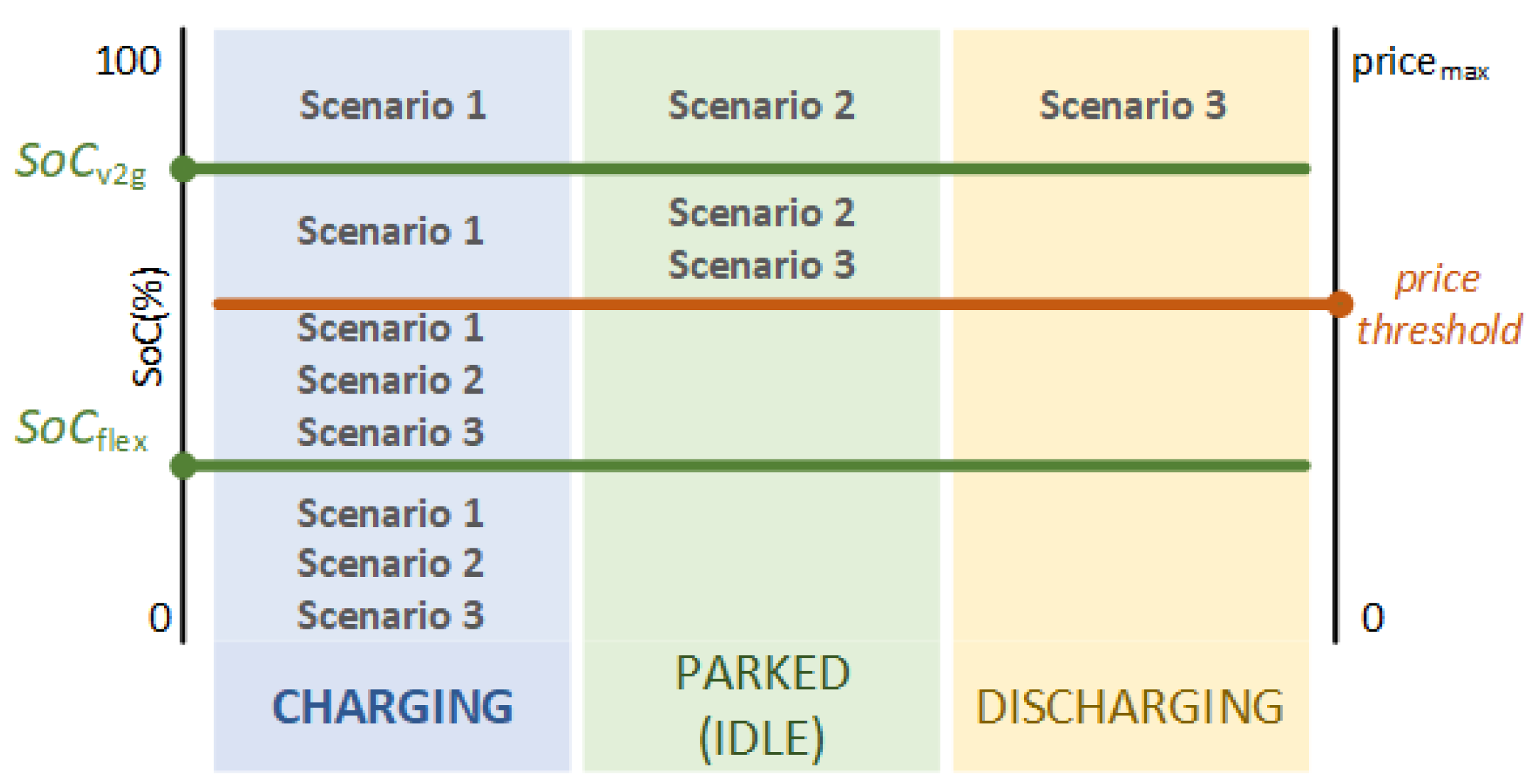
It should be pointed out that in
scenario 3, an additional parameter was considered,
which practically determines at which battery level the vehicle can return power to the grid. Herein, this parameter was chosen to be 10% higher than the
, i.e., the optimal value for the
that led to the minimum total cost for the respective velocity (
Figure 8).
Scenario 3 offered an extra, however marginal, cost gain to the PHEV user for lower speeds (i.e., 10, 20, and 30 km/h). Specifically, the cost gain for 20 km/h increased to ~41% compared to the 34% that was derived earlier with scenario 2.
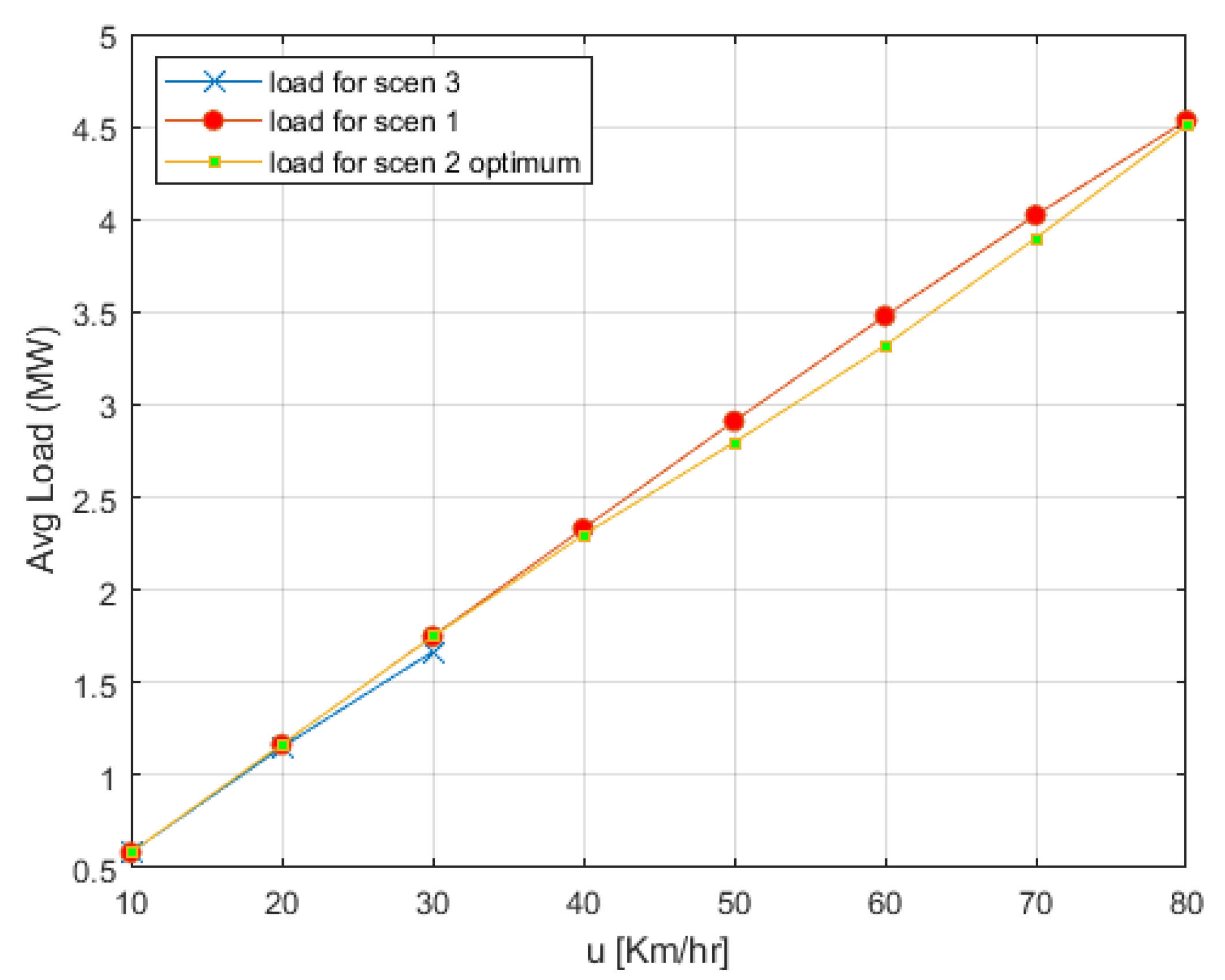
Switching back to the network perspective,
Figure 11 depicts the average load over 24 h for the optimized setups regarding
and
. Note that
scenario 3 was also considered in the figure but only for the three lowest driving speeds, where this scenario showed a slightly better performance regarding total cost compared to
scenario 2.
Figure 11 practically verifies our initial remark that the network remains unaffected from the price-sensitive charging strategies with the respect to the average load over 24 h.
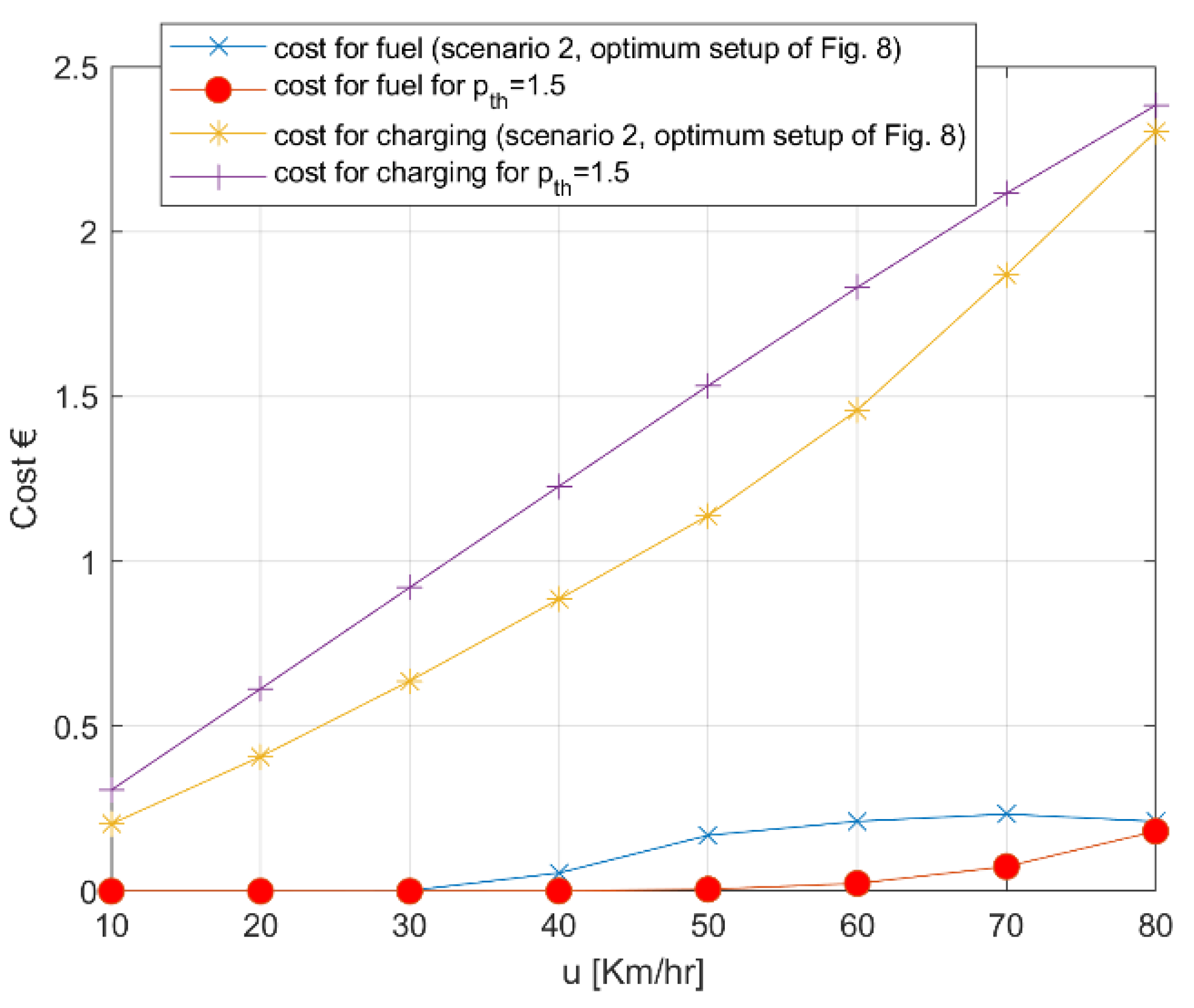
As a final comment to this study,
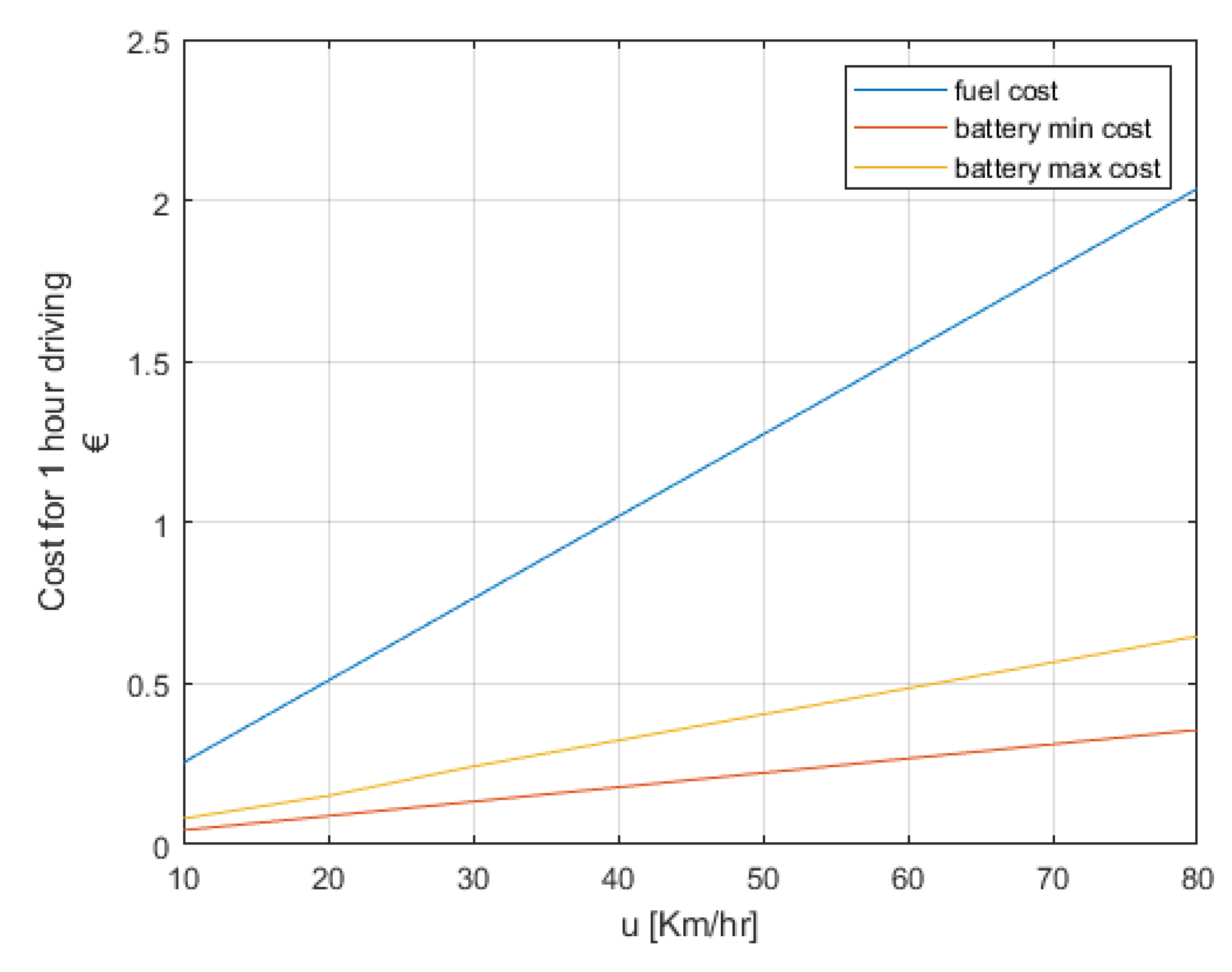
Figure 12 provides insight into how the proposed charging strategies along with the optimized setups for the different driving speeds achieved the cost gains shown earlier. Specifically,
Figure 12 analyses the total cost of
Figure 9 into cost for fuel (when the PHEV is forced to switch to fuel while driving) and charging costs (produced by the charging session that the PHEV needs to initiate). For instance, at 50 km/h the total cost for the optimum setup (
Figure 9) was EUR 1.31; this value was analyzed to be EUR 0.17 due to the fuel and EUR 1.14 due to the charging.
It is clear that any cost gain between the reference scenario (pth = 1.5) and the optimized setup comes from reduced charging sessions. It is worth noting that for driving speeds up to 40 km/h, the cost gain for the PHEV user comes without sacrificing the clean energy advantage that PHEVs bring to transportation; the cost for fuel (blue line) for the optimal setup of scenario 2 was practically zero, equal to the reference scenario. For higher driving speeds, the fuel cost was higher than the reference scenario. Nevertheless, in the context of this kind of study, a possible remedy for this situation could be the use of more granular values for all the parameters involved in our simulation platform than the ones used in this work. This way, optimized setups that lead to fuel costs as low as scenario 1 and, at the same time, reduce the total cost for the PHEV user might derived.
4. Discussion
In essence, this work presents a charging policy that takes advantage of the practically limited energy needs of PHEV owners (a full charge is not required for the typical PHEV driver over the course of a day [
21]) in order to provide the owner with price incentives to regulate the charging of the vehicle. At first,
Figure 5 shows that for a moderate driving speed, the average SoC level throughout the day was kept high (>90%), leading to the conclusion that the vehicle starts unnecessary charging cycles; imposing a price threshold to charging directly lowers the SoC level but not as low as to force the vehicle to switch to fuel. In order to prove that such a charging strategy that employs price thresholds to allow for charging that does not lead to additional energy demands throughout the day,
Figure 6 is provided. Lastly, the total cost for a PHEV driver for 24 h vehicle usage comprising both charging and fuel costs is shown in
Figure 7; there is a clear gain from using price constraints for charging without sacrificing user experience, since the vehicle’s average SoC level remained higher than 75%. In this context, the work in [
22] acknowledges the fact that electric vehicles do not need full daily charges to meet their driving needs and investigates the impact of non-systematic plug-in behavior to the grid and to the potential for flexibility.
Part of this work further analyzed the specific parameters of the proposed charging strategies (i.e.,
and
) and offered optimized values that maximized the cost gain for PHEV owners (see
Figure 8).
V2G was also considered as a means to further reduce charging costs as specifically shown in
Figure 10. Therein, it was shown that in the context of the proposed charging strategy, V2G had very little to offer, showing a marginal extra cost gain for the PHEV user for low driving speeds.
In an effort to broaden the analysis of this work,
Figure 12 provides an insight into the source of the costs, presenting the fuel and charging costs separately. Apparently, after the point of 40 km/h, any cost reduction available to the PHEV owner comes with an increase in fuel consumption, i.e., the driver cannot rely exclusively on the vehicle’s battery. This final remark clearly sets the path for future work involving multi-objective problems that target both the cost for the user and the efficient use of renewable energy [
23].
5. Conclusions
This work focused on price-sensitive charging strategies in the context of ICS that allow PHEV users to control the charging of their vehicle in order to receive cost benefits. Two such strategies were employed, i.e., scenarios 2 and 3 compared against a reference strategy of uncontrolled charging (scenario 1).
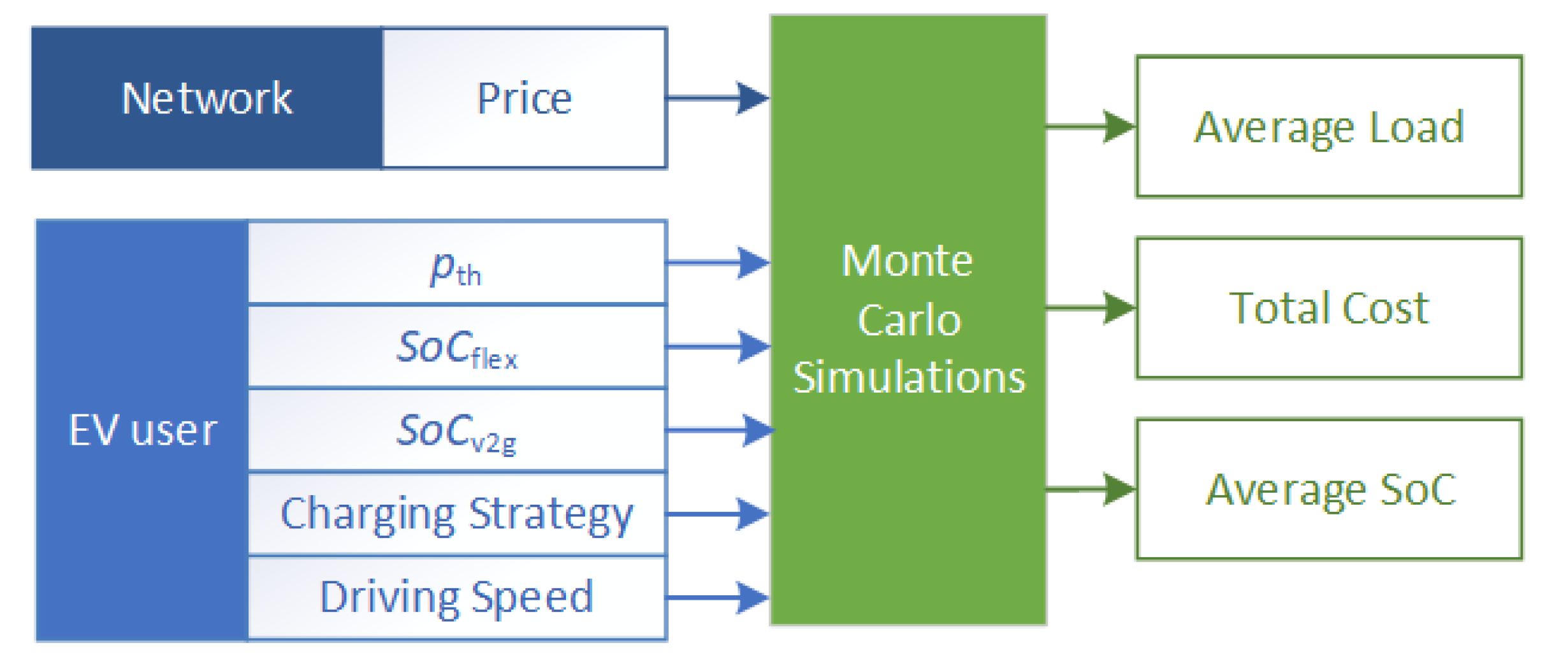
The study was based on Monte Carlo simulations to compensate for the stochastic nature of the PHEV mobility patterns via a MATLAB simulation platform. Firstly, as it was proved in this work, price-sensitive charging policies did not bear additional load to the energy grid with respect to the average load over a period of time compared to uncontrolled charging (scenario 1). On the other hand, uncontrolled charging involved higher costs for the PHEV user compared to ICS strategies (scenarios 2 and 3). The proposed price-sensitive charging strategies resulted in cost gains for the PHEV user that were higher for lower driving speeds, i.e., lower than 40 km/h; for instance, a PHEV user with an average driving speed of 20 km/h may benefit from ~34% cost reduction under the typical G2V operation (scenario 2) and ~41% if V2G functionality is also considered (scenario 3).
Furthermore, the parametric nature of such charging strategies was tackled, and guidelines for the PHEV user to select these parameters optimally in order to receive cost benefits were derived. Finally, especially for higher driving speeds (>40 km/h), further analysis is necessary in order for both the objectives of reduced costs for PHEV users and of prioritizing the consumption of clean energy coming from PHEV batteries over fuel to be met simultaneously.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}