
Bi-Objective Optimization for Sustainable Logistics in the Closed-Loop Inventory Routing Problem †




Abstract
1. Introduction
2. Literature Review
3. Problem Description
4. Mathematical Formulation
4.1. Parameters
- : Fixed transportation cost of traveling arc ;
- : Variable transportation cost per unit transported on arc ;
- : Inventory holding cost of loaded pallets at node i;
- : Inventory holding cost of empty pallets at node i;
- : Inventory capacity of loaded pallets at node i;
- : Inventory capacity of empty pallets at node i;
- : Demand of customer i in period t;
- : Vehicle capacity;
- : Weight of a loaded pallet;
- : Weight of an empty pallet;
- : Limit on driving time before a break;
- G: The necessary time at the customer’s gate;
- : Maximum driving time per day.
4.2. Decision Variables
- : Equals 1 if arc is used along vehicle itinerary v during time period t;
- : The quantity of loaded pallets available at node i by the end of period t;
- : The quantity of empty pallets available at node i by the end of period t;
- : The quantity of loaded pallets delivered to node i in period t;
- : The quantity of empty pallets returned to node i in period t;
- : The quantity of loaded pallets carried from node i to node j during period t;
- : The quantity of empty pallets carried from node i to node j during period t;
- : The time length of the itinerary;
- : The time at which vehicle v arrives at customer i during period t;
- : The number of breaks per vehicle v;
- : Customer’s relative position in the tour sequence during period t;
- : Equals 1 if a vehicle is resting at a node.
4.3. Objective Function: Normalized Weighted Sum
4.4. Constraints
5. Experiments and Results
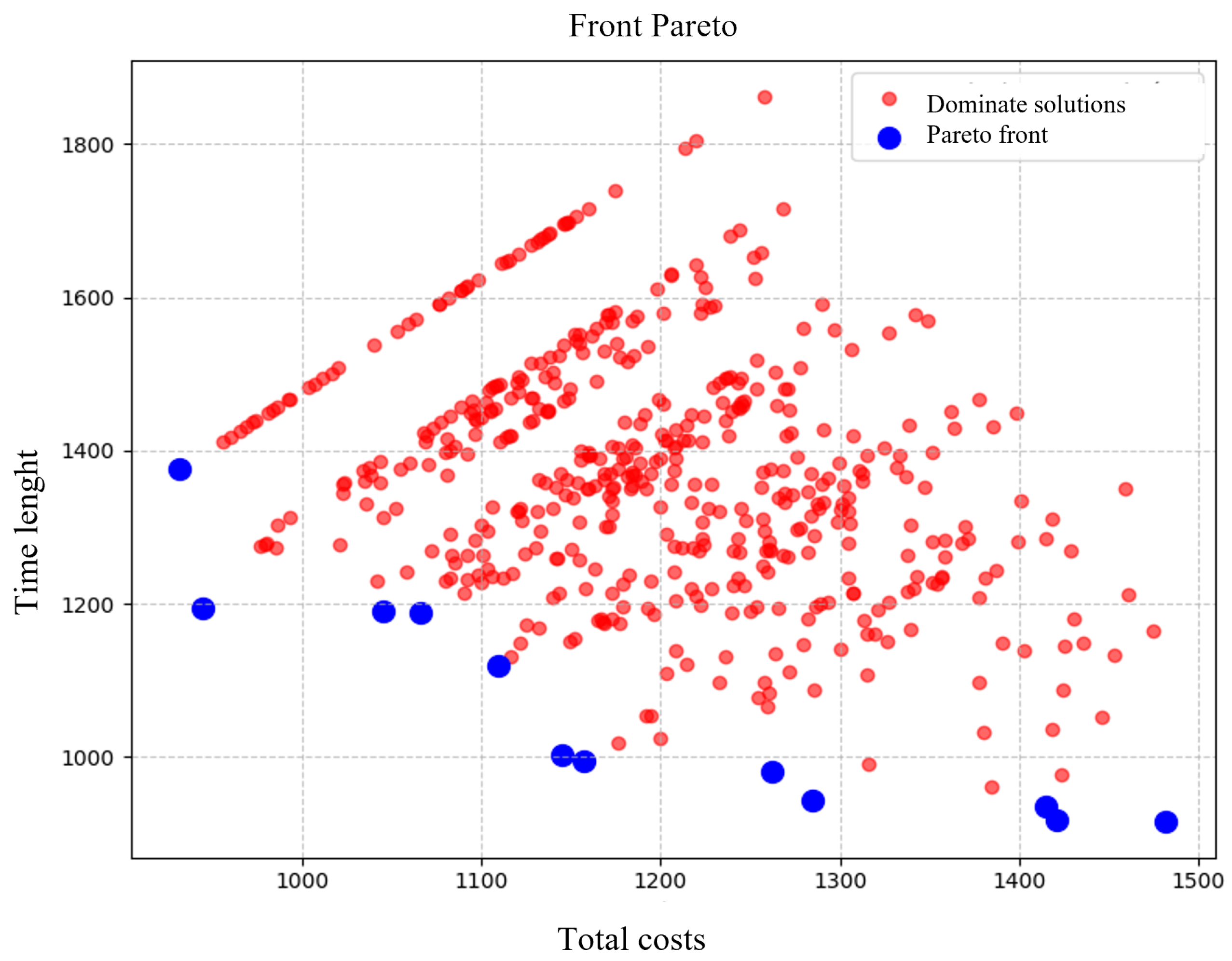
6. Non-Dominated Sorting Genetic Algorithm II
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Archetti, C.; Speranza, M.G.; Boccia, M.; Sforza, A.; Sterle, C. A branch-and-cut algorithm for the inventory routing problem with pickups and deliveries. Eur. J. Oper. Res. 2020, 282, 886–895. [Google Scholar] [CrossRef]
- Gutierrez-Alcoba, A.; Rossi, R.; Martin-Barragan, B.; Embley, T. The stochastic inventory routing problem on electric roads. Eur. J. Oper. Res. 2023, 310, 156–167. [Google Scholar] [CrossRef]
- Mahjoob, M.; Fazeli, S.S.; Tavassoli, L.S.; Mirmozaffari, M.; Milanlouei, S. A green multi-period inventory routing problem with pickup and split delivery: A case study in flour industry. Sustain. Oper. Comput. 2021, 2, 64–70. [Google Scholar] [CrossRef]
- Soysal, M. Closed-loop Inventory Routing Problem for returnable transport items. Transp. Res. Part D Transp. Environ. 2016, 48, 31–45. [Google Scholar] [CrossRef]
- Habibi, M.K.; Hammami, R.; Battaia, O.; Dolgui, A. Simultaneous Pickup-and-Delivery Production-Routing Problem in closed-loop supply chain with remanufacturing and disassembly consideration. Int. J. Prod. Econ. 2024, 273, 109290. [Google Scholar] [CrossRef]
- Govindan, K.; Salehian, F.; Kian, H.; Hosseini, S.T.; Mina, H. A location-inventory-routing problem to design a circular closed-loop supply chain network with carbon tax policy for achieving circular economy: An augmented epsilon-constraint approach. Int. J. Prod. Econ. 2023, 257, 108771. [Google Scholar] [CrossRef]
- Mes, M.; Schutten, M.; Pérez Rivera, A. Inventory routing for dynamic waste collection. Waste Manag. 2014, 34, 1564–1576. [Google Scholar] [CrossRef] [PubMed]
- Rahimi, M.; Baboli, A.; Rekik, Y. Multi-objective inventory routing problem: A stochastic model to consider profit, service level and green criteria. Transp. Res. Part E Logist. Transp. Rev. 2017, 101, 59–83. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Q.; Guan, X.; Fan, J.; Liu, Y.; Wang, H. Collaboration and Resource Sharing in the Multidepot Multiperiod Vehicle Routing Problem with Pickups and Deliveries. Sustainability 2020, 12, 5966. [Google Scholar] [CrossRef]
- Navazi, F.; Sazvar, Z.; Tavakkoli-Moghaddam, R. A sustainable closed-loop location-routing-inventory problem for perishable products. Sci. Iran. 2021, 30, 757–783. [Google Scholar] [CrossRef]
- Demir, E.; Bektas, T.; Laporte, G. The bi-objective Pollution-Routing Problem. Eur. J. Oper. Res. 2014, 232, 464–478. [Google Scholar] [CrossRef]
- Iassinovskaia, G.; Limbourg, S.; Riane, F. The inventory-routing problem of returnable transport items with time windows and simultaneous pickup and delivery in closed-loop supply chains. Int. J. Prod. Econ. 2017, 183, 570–582. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| N | 8 | EUR/day | |
| 25 pallets | EUR/day | ||
| EUR/km | 420 min | ||
| EUR/km/item | T | 4 | |
| S | 50 km/h | 120 min | |
| EUR/day | V | 2 | |
| EUR/day | G | 10 min |
| 0.0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 1481.76 | 1421.22 | 1284.52 | 1157.28 | 1157.28 | 944.81 | 944.81 | 944.81 | 944.81 | 944.81 | 931.83 |
| F2 | 916.09 | 917.24 | 943.48 | 993.83 | 993.83 | 1195.01 | 1195.01 | 1195.01 | 1195.01 | 1195.01 | 1375.51 |
| Time(s) | 26.81 | 1133.11 | 3506.21 | 665.32 | 443.23 | 323.54 | 943.78 | 543.58 | 536.70 | 435.86 | 43.72 |
| F1 | F2 | Normalized F1 | Normalized F2 | Distance |
|---|---|---|---|---|
| 931.832 | 1375.512 | 0.00 | 1.000 | 1.00 |
| 944.812 | 1195.008 | 0.026 | 0.6075 | 0.607 |
| 1045.042 | 1189.380 | 0.231 | 0.594 | 0.638 |
| 1065.883 | 1189.128 | 0.273 | 0.594 | 0.654 |
| 1109.378 | 1119.528 | 0.362 | 0.442 | 0.572 |
| 1145.313 | 1003.164 | 0.436 | 0.189 | 0.475 |
| 1157.278 | 993.828 | 0.460 | 0.169 | 0.490 |
| 1262.010 | 981.612 | 0.674 | 0.142 | 0.689 |
| 1284.516 | 943.476 | 0.720 | 0.059 | 0.723 |
| 1414.726 | 934.860 | 0.986 | 0.040 | 0.987 |
| 1421.216 | 917.244 | 1.000 | 0.002 | 1.00 |
| 1382.338 | 916.092 | 0.920 | 0.00 | 0.920 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zormati, C.; Chargui, T.; Bekrar, A.; Ait-El-Cadi, A. Bi-Objective Optimization for Sustainable Logistics in the Closed-Loop Inventory Routing Problem. Eng. Proc. 2025, 97, 29. https://doi.org/10.3390/engproc2025097029
Zormati C, Chargui T, Bekrar A, Ait-El-Cadi A. Bi-Objective Optimization for Sustainable Logistics in the Closed-Loop Inventory Routing Problem. Engineering Proceedings. 2025; 97(1):29. https://doi.org/10.3390/engproc2025097029
Chicago/Turabian StyleZormati, Chaima, Tarik Chargui, Abdelghani Bekrar, and Abdessamad Ait-El-Cadi. 2025. "Bi-Objective Optimization for Sustainable Logistics in the Closed-Loop Inventory Routing Problem" Engineering Proceedings 97, no. 1: 29. https://doi.org/10.3390/engproc2025097029
APA StyleZormati, C., Chargui, T., Bekrar, A., & Ait-El-Cadi, A. (2025). Bi-Objective Optimization for Sustainable Logistics in the Closed-Loop Inventory Routing Problem. Engineering Proceedings, 97(1), 29. https://doi.org/10.3390/engproc2025097029