
In-Band Medium-Frequency R-Mode Signal Quality Estimation † †

 ,
,  , ,
, ,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
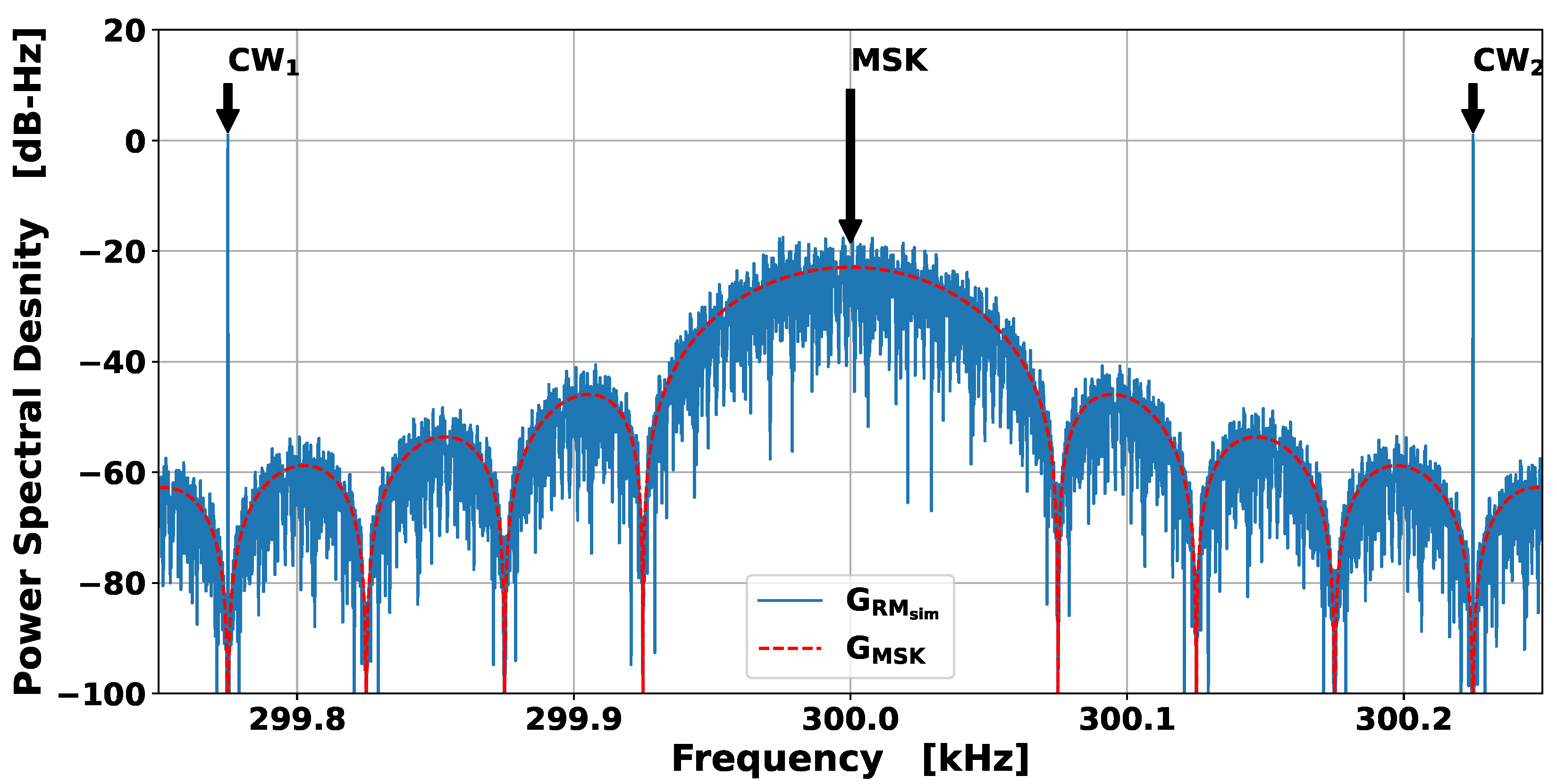
2. The MF R-Mode Signal
3. Definition of the Signal Quality Indicator
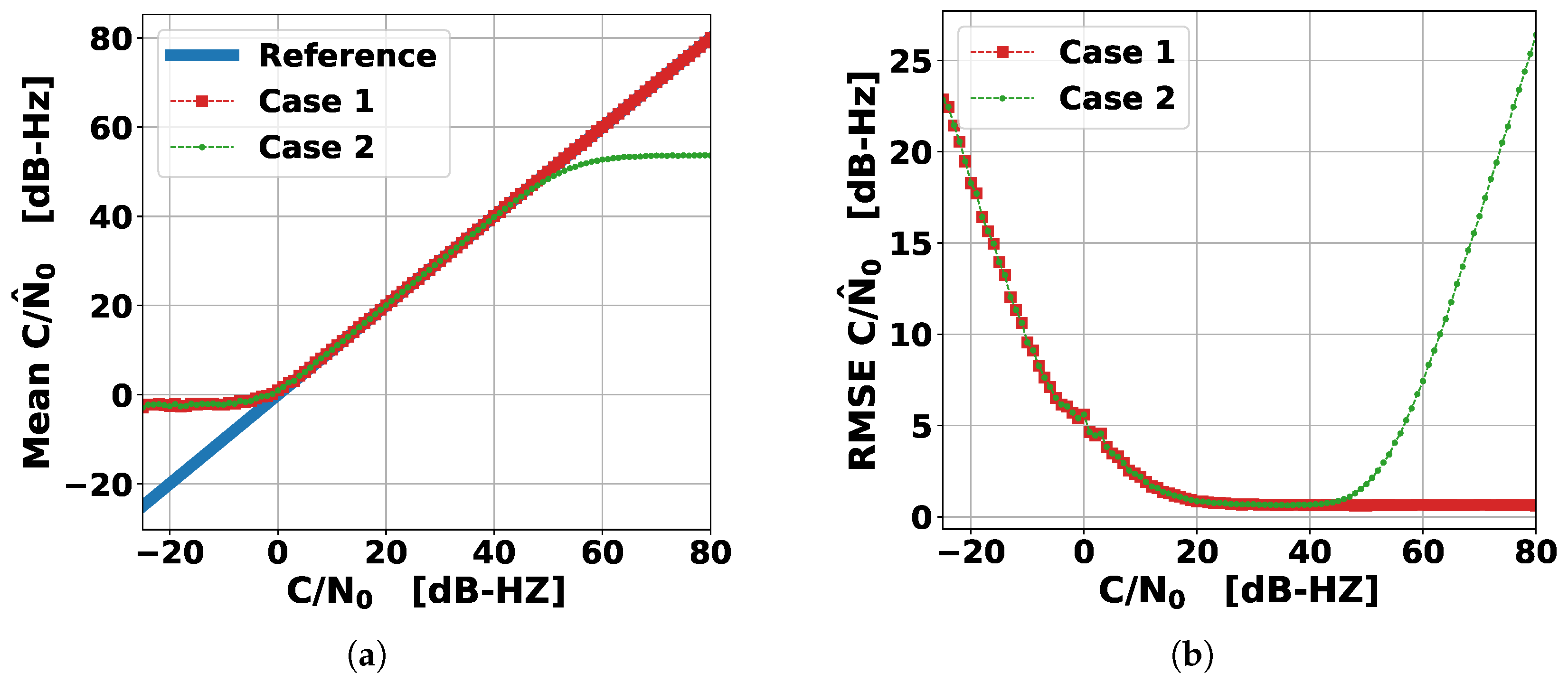
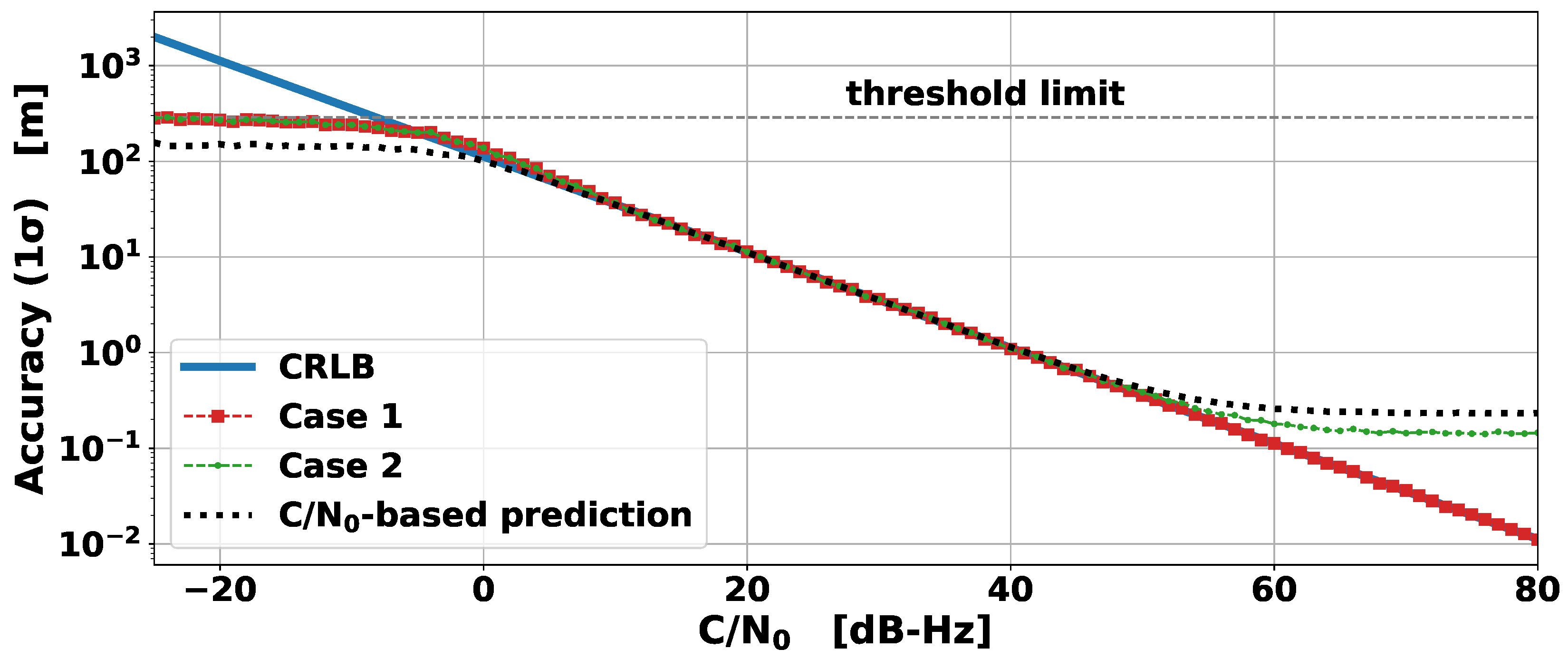
4. Simulation
- Case 1: Single tone with AWGN
- Case 2: Single channel R-Mode signal (MSK + CWs) in AWGN
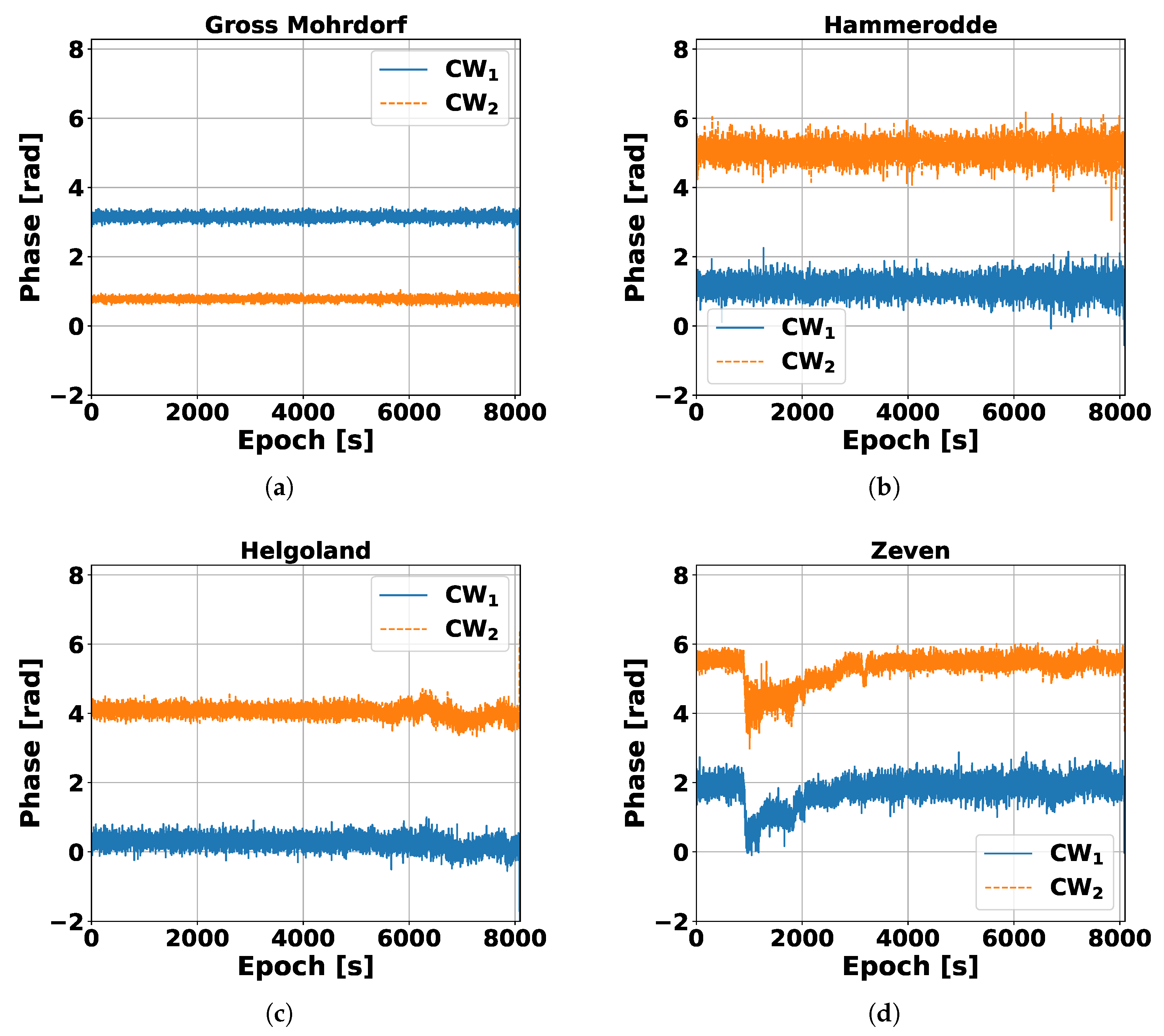
5. Real Data Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johnson, G.; Swaszek, P. Feasibility Study of R-Mode Using MF DGPS Transmissions. Available online: https://www.iala.int/content/uploads/2016/08/accseas_r_mode_feasibility_study_mf_dgps_transmissions.pdf (accessed on 8 January 2024).
- Johnson, G.; Dykstra, K.; Ordell, S.; Swaszek, P. R-Mode positioning system demonstration. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2020), Online, 21–25 September 2020. [Google Scholar] [CrossRef]
- Jeong, S.; Son, P.W. Preliminary Analysis of Skywave Effects on MFDGNSS R-Mode Signals During Daytime and Nighttime. In Proceedings of the IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Yeosu, Republic of Korea, 26–28 October 2022. [Google Scholar] [CrossRef]
- Grundhöfer, L.; Rizzi, F.G.; Gewies, S.; Hoppe, M.; Bäckstedt, J.; Dziewicki, M.; Del Galdo, G. Positioning with medium frequency R-Mode. Navigation 2021, 68, 829–841. [Google Scholar] [CrossRef]
- Gewies, S.; Dammann, A.; Ziebold, R.; Bäckstedt, J.; Bronk, K.; Wereszko, B.; Rieck, C.; Gustafson, P.; Eliassen, C.G.; Hoppe, M.; et al. R-Mode testbed in the Baltic sea. In Proceedings of the 19th IALA Conference, Incheon, Republic of Korea, 27 May–2 June 2018. [Google Scholar]
- Rizzi, F.G.; Grundhöfer, L.; Gewies, S.; Ehlers, T. Performance assessment of the medium frequency R-Mode Testbed at Sea near Rostock. Appl. Sci. 2023, 13, 1872. [Google Scholar] [CrossRef]
- Interreg Baltic See Region. ORMOBASS. Available online: https://interreg-baltic.eu/project/ormobass/ (accessed on 8 January 2024).
- Falletti, E.; Pini, M.; Lo Presti, L. Low Complexity Carrier-to-Noise Estimators for GNSS Digital Receivers. IEEE Trans. Aerosp. Elecronic Syst. 2011, 47, 420–437. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Grundhöfer, L.; Wirsing, M.; Gewies, S.; Del Galdo, G. Phase Estimation of Single Tones Next to Modulated Signals in the Medium Frequency R-Mode System. IEEE Access 2022, 10, 73309–73316. [Google Scholar] [CrossRef]
- Proakis, J.G.; Salehi, M. Digital Communications; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Hehenkamp, N.; Rizzi, F.G.; Grundhöfer, L.; Gewies, S. Prediction of Ground Wave Propagation Delay for MF R-Mode. Sensors 2024, 24, 282. [Google Scholar] [CrossRef] [PubMed]
- Rizzi, F.G.; Hehenkamp, N.; Grundhöfer, L.; Gewies, S. Enhancement of MF R-Mode ranging accuracy by exploiting measurement-based error mitigation techniques. WMU J. Marit. Aff. 2023, 22, 299–316. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rizzi, F.G.; Grundhöfer, L.; Hehenkamp, N.; Gewies, S.; Medina, D.; Gandarias, J.M. In-Band Medium-Frequency R-Mode Signal Quality Estimation †. Eng. Proc. 2025, 88, 50. https://doi.org/10.3390/engproc2025088050
Rizzi FG, Grundhöfer L, Hehenkamp N, Gewies S, Medina D, Gandarias JM. In-Band Medium-Frequency R-Mode Signal Quality Estimation †. Engineering Proceedings. 2025; 88(1):50. https://doi.org/10.3390/engproc2025088050
Chicago/Turabian StyleRizzi, Filippo Giacomo, Lars Grundhöfer, Niklas Hehenkamp, Stefan Gewies, Daniel Medina, and Juan Manuel Gandarias. 2025. "In-Band Medium-Frequency R-Mode Signal Quality Estimation †" Engineering Proceedings 88, no. 1: 50. https://doi.org/10.3390/engproc2025088050
APA StyleRizzi, F. G., Grundhöfer, L., Hehenkamp, N., Gewies, S., Medina, D., & Gandarias, J. M. (2025). In-Band Medium-Frequency R-Mode Signal Quality Estimation †. Engineering Proceedings, 88(1), 50. https://doi.org/10.3390/engproc2025088050