Abstract
We are working on an innovative approach to outdoor human motion capture, using a wearable device that integrates a low-cost GNSS (Global Navigation Satellite System) receiver and an INS (Inertial Navigation System) via a zero-velocity update (ZUPT) methodology. In this study, we focused on using these devices to reconstruct the foot trajectory. Our work addresses the challenge of capturing precise foot movements in uncontrolled outdoor environments, a task traditionally constrained by the limitations of laboratory settings. We equipped devices that combine inertial measurement units (IMUs) with GNSS receivers in the following configuration: one on each foot and one on the head. We experimented with different GNSS data processing techniques, such as Post-Processed Kinematic (PPK) positioning with and without Moving Base (MB), and after the integration with the IMU, we obtained centimeter-level precision in horizontal and vertical positioning for various walking speeds. This integration leverages a loosely coupled GNSS/INS approach, where the GNSS solution is independently processed and subsequently used to refine the INS outputs. Enhanced by ZUPT and Madgwick filtering, this method significantly improves the trajectory reconstruction accuracy. Indeed, our research includes a study of the impact of moving speed on the performance of these low-cost GNSS receivers. These insights pave the way for future exploration into tightly coupled GNSS/INS integration using low-cost GNSS receivers, promising advancements in fields like sports science, rehabilitation, and well-being. This work seeks not only to contribute to the field of wearable technology, but also to open possibilities for further innovation in affordable, high-accuracy personal navigation and activity monitoring devices.
1. Introduction
Human motion capture technology, essential in fields such as sports science, rehabilitation, and virtual reality, has traditionally been confined to well-equipped laboratory environments. This limitation is particularly significant as many real-world applications require motion tracking across varied, uncontrolled settings. The integration of GNSS technology with motion capture represents a significant advancement in overcoming these limitations. GNSSs offer a way to achieve high-accuracy location tracking in outdoor environments, enabling the capture of human movements anywhere GNSS signals are available. However, despite the potential of GNSSs, their application in accurate motion capture, especially at the level of foot trajectory tracking, poses challenges due to signal degradation in less-than-ideal conditions and due to the high dynamic to which the receiver can be subject.
Our work focuses on improving outdoor human motion capture by applying it to foot movement using a combination of GNSS receivers and INSs.
Objectives
This study employs the loosely coupled integration [1] of low-cost GNSS receivers with INSs, using the ZUPT methodology to track and reconstruct foot trajectories. Recognizing the need for an innovative approach to this challenge, our research specifically focuses on assessing the best-performing techniques for GNSS post-processing, investigating PPK [2], Moving Base, and the mitigation of the signal loss caused by the high jerk to which the receiver is subjected due to the rapid dynamic of foot movement.
2. Materials and Methods
2.1. Testing Setup
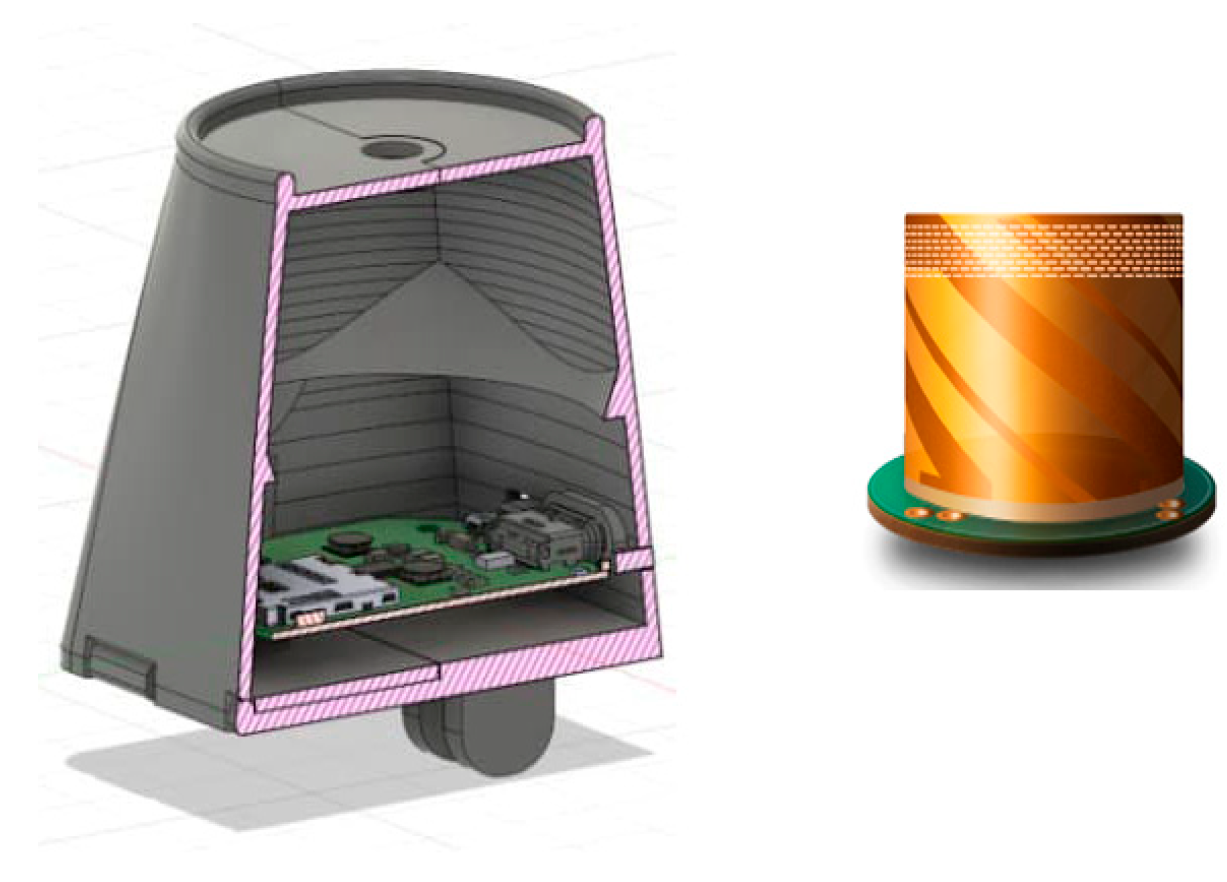
For our study, we utilized a compact, integrated GNSS/IMU-based device called “REMOT” (Figure 1), designed by our team to capture and record satellite and inertial data. The device was equipped with a specially developed helicoidal antenna to optimize satellite signal reception. It was crucial to minimize the device’s size and weight to avoid interfering with natural movement patterns, thereby improving the reliability of our motion analysis.
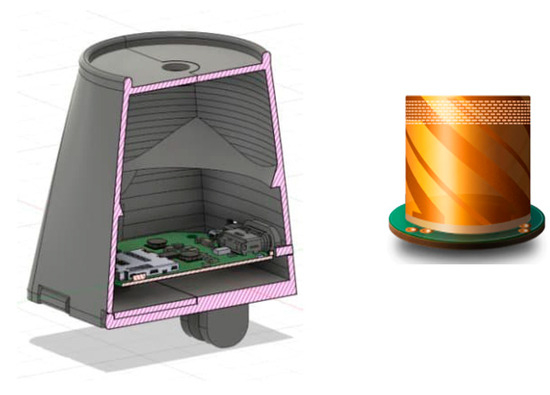
Figure 1.
“REMOT” device with bespoke helicoidal antenna.
The IMU sensor used is an MTi-7 (Xsens Technologies B.V., Enschede, The Netherlands) and the GNSS receiver use is an ZED-F9P (u-blox AG, Thalwil, Switzerland).
Three REMOT sensors were attached to the test subject—one on each foot and one on the head—to capture comprehensive movement data from different body points.
2.2. Testing Environment
The experimental trials were conducted in a park, called “Giardini Govi”, in Genoa, Italy. This location was chosen for its minimal obstructions, providing the clear sky views optimal for GNSS signal reception. The environment was without tall buildings or tree coverage, avoiding potential multipath and signal blockage. A straight line was marked on the ground to define a controlled trajectory for the tests, and 30 lines were marked on this trajectory, at 70 cm each (Figure 2), to define the points where feet were to be placed during walking.

Figure 2.
Picture the controlled trajectory at “Giardini Govi”.
2.3. Testing Description
We conducted three test sequences, each at different walking speeds—1, 1.5 and 2 steps/second—to assess the system’s performance across different dynamics. Walking speeds were regulated using a metronome to maintain consistent pacing throughout the tests. The recorded data were stored internally and later extracted for post-processing, ensuring that the integration of GNSS and INS data could be analyzed accurately against a pre-surveyed ground truth trajectory and foot contact point.
2.4. GNSS Integration with IMU for Step and Stride Tracking
We decided to use a loosely coupled integration approach to obtain a stable and continuous positioning solution. The advantage of using this method is that the possibility of computing the GNSS solution separately with the aid of software available on the market while implementing the integration algorithm is relatively simple.
2.5. ZUPT Methodology
ZUPT (Zero-Update Position and Time) [3] is one of the common approaches used in inertial navigation, allowing us to reduce the solution drift and instability due to noisy signals. The ZUPT algorithm is typically implemented as an Extended Kalman filter that, instead of sensor measurements, introduces pseudo-measurements of velocity equal to zero when the device is assumed to be static.
Hence, ZUPT consists of two parts. One of these is a zero-velocity detector, and the other one is an EKF-based inertial navigation algorithm. The purpose of the detector is to determine which time samples correspond to zero velocity based on the raw IMU data. The detection algorithm can be based on numerous approaches, including machine learning. We use a generalized likelihood ratio test (GLRT) called SHOE, which was introduced by [4,5].
In the inertial navigation algorithm, detected zero-velocity instances allow us to apply pseudo-measurements at the correct time, forcefully setting the estimated velocity to zero, preventing the solution from exhibiting unstable behavior. Since these measurements are hypothetical and do not come from any kind of sensors, their covariance is set manually based on the estimated uncertainty of the detection algorithm.
ZUPT can be applied together with the LC GNSS corrections if their time is coincident. In such a case, the position correction is applied based on the GNSS positioning data, while the velocity correction is set up in the same way as for the normal ZUPT. One more advantage of such an approach is preventing output deviation during the stance phase in cases of reduced GNSS precision.
2.6. Impact of Walking Speed on GNSS Performance
The impact of walking speed on GNSS performance is a significant factor in our application. GNSSs rely on signals from satellites to calculate positions on Earth, and the dynamics of the user’s speed can influence the accuracy and reliability of these calculations.
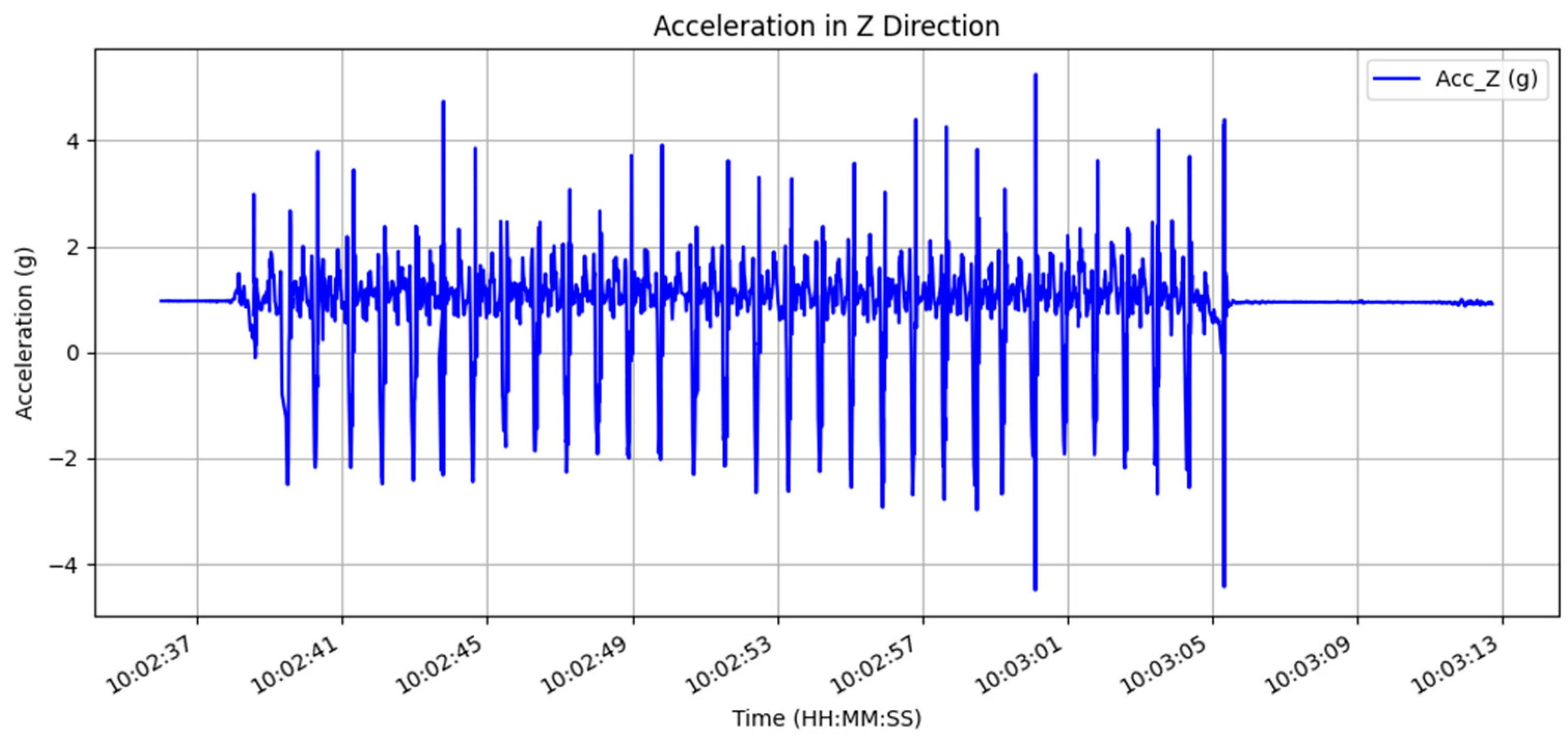
In our observations, we noticed a correlation between higher jerk (Figure 3) and an increased frequency of cycle slips in the GNSS data. Cycle slips refer to the sudden loss of continuous phase measurements, which can disrupt the accuracy of position, velocity, and time calculations derived from GNSS signals. These disruptions are particularly clear during instances of higher acceleration.
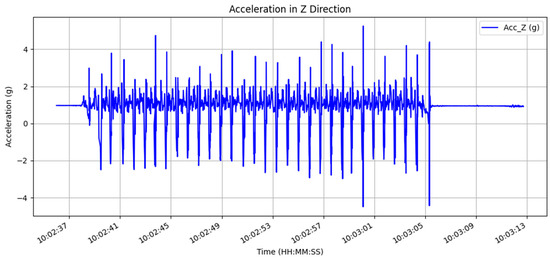
Figure 3.
Acceleration values in g (9.81 m/s2) of the foot recorded during a walking test at 2 step/s, taken from the INS data.
Our hypothesis is that as the acceleration of a GNSS-equipped device increases, the integrity of the signal lock is more likely to be compromised, leading to more frequent cycle slips. The cycle slips are due to the Doppler effect because higher accelerations result in a more pronounced Doppler shift in the frequency of the GNSS signals received. This effect must be correctly accounted for in the signal tracking to maintain accuracy in position estimates.
2.7. Mitigating the Impact of Moving Speed
To mitigate the effects of high acceleration and derived Doppler shifts due to foot movement, we explored various settings within the firmware of the Ublox ZED-F9P receiver. By adjusting the dynamic model’s parameter, we tried to optimize the signal tracking loop for the high dynamic conditions experienced.
Our extensive testing across the dynamic models led us to select the “Airborne < 2 g” model, which is specifically engineered for scenarios with higher dynamic range and acceleration capabilities than typical pedestrian movements.
This model supports conditions like the dynamic nature of foot movement during walking, particularly at higher speeds where the foot can experience significant jerk in different directions.
The outcome of implementing the “Airborne < 2 g” model was a marked reduction in cycle slips. These slips can lead to gaps in data, resulting in a loss of accuracy and increased post-processing efforts being required to reconstruct the trajectory accurately.
The “Airborne < 2 g” dynamic model, with its capacity to handle increased horizontal and vertical velocities, demonstrated an improved robustness in signal tracking. As a result, the receiver maintained a more consistent lock on the satellite signals. This improvement had a great impact on our application.
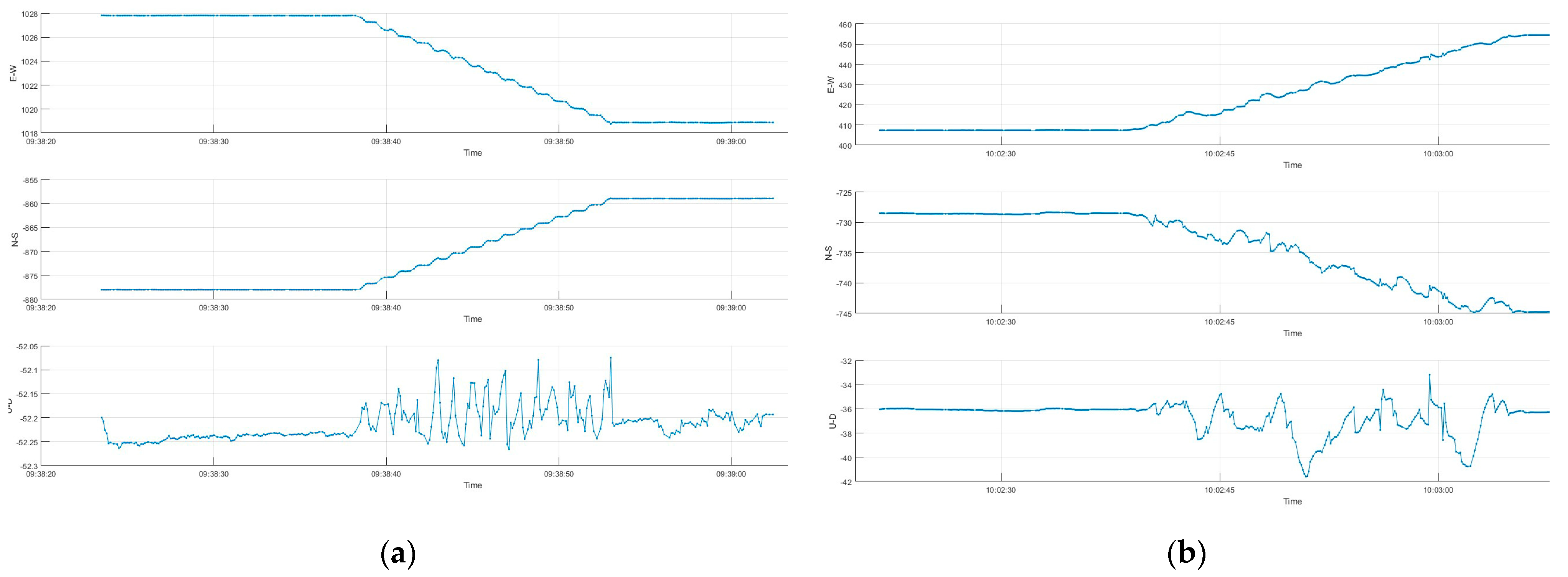
The visual comparison (Figure 4) shows the superiority of the “Airborne < 2 g” model in maintaining the consistent and accurate tracking of the trajectory. With fewer cycle slips and reduced signal noise, the setting provides a clean dataset. This allows us to extract meaningful gait parameters [6,7]. This difference is particularly prominent in the U-D series.
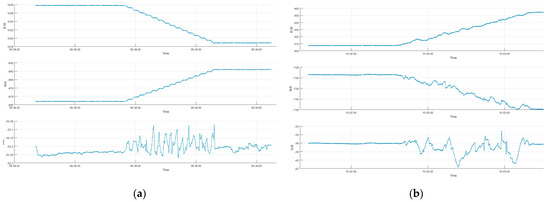
Figure 4.
(a) Position’s time series with Airborne < 2 g; (b) position’s time series with Portable.
On the other hand, the “Portable” model generates a path that lacks the precision necessary for detailed motion analysis. The erratic nature of this trajectory would result in a misrepresentation of the gait parameters.
Even an analysis of the metrics of the table above (Table 1) demonstrates the superiority of the Airborne < 2 g model over the others, justifying its selection for our study.

Table 1.
Tests across dynamic models of the Ublox Zed F9P of LF mounted device.
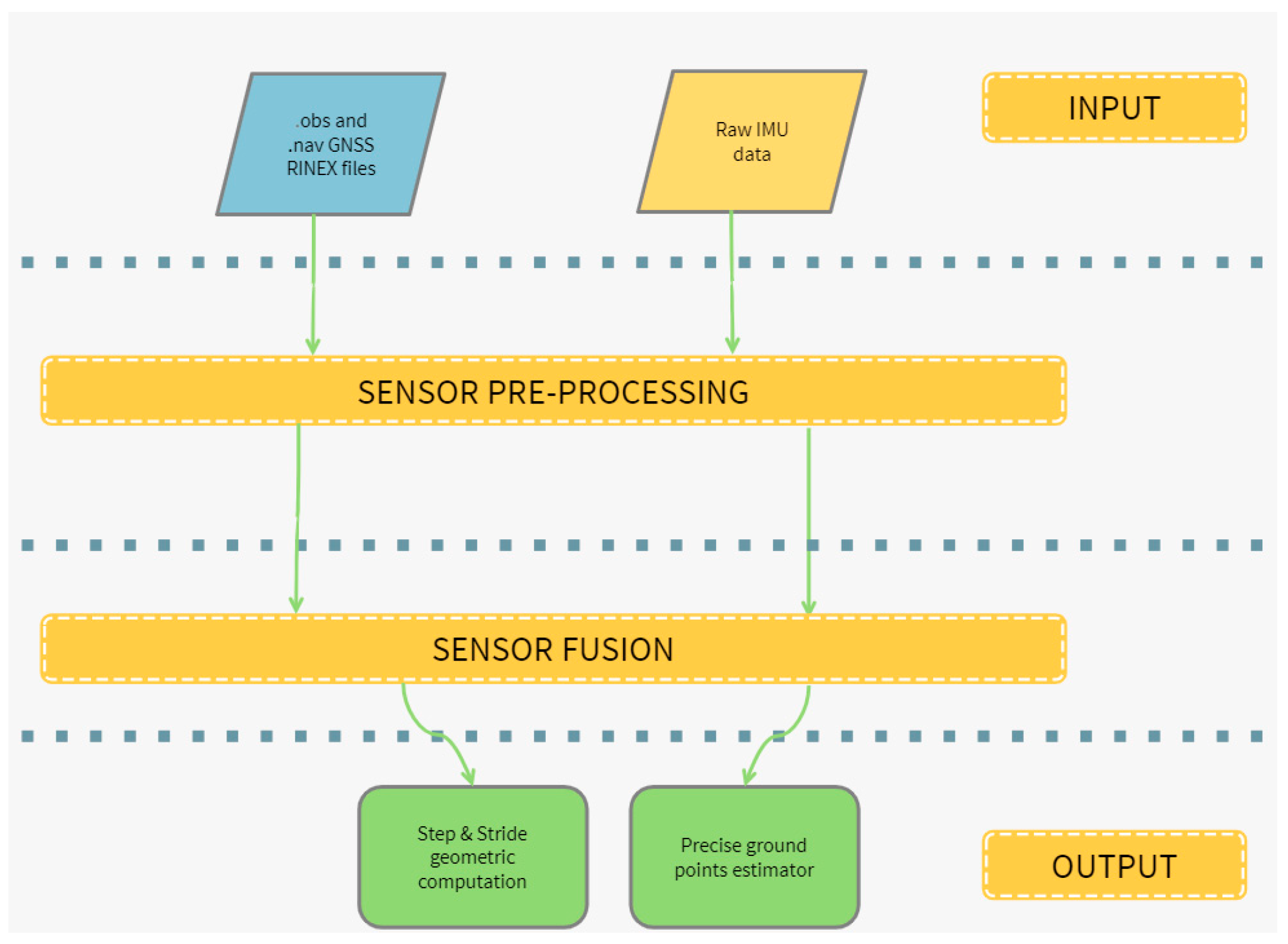
2.8. Data Processing Workflow for GNSS/INS Integration (Figure 5)
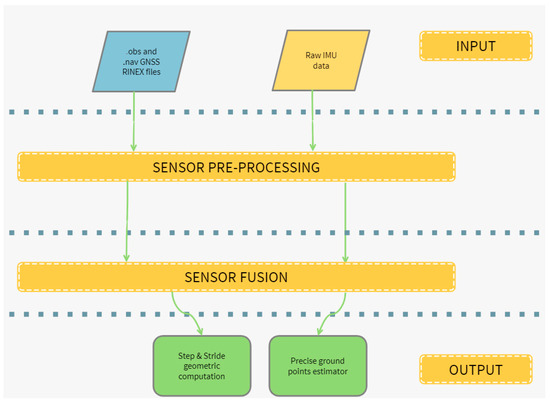
Figure 5.
Workflow diagram.
- Input files: we collect raw GNSS data in .ubx format and IMU data in .mtb format on the device’s internal memory.
- Conversion software: these files are extracted and then converted into standardized formats, with GNSS data converted into RINEX. obs and .nav files, and IMU data into text files.
- GNSS processing: the RINEX files are processed to generate a precise GNSS positioning file.
- Integration and analysis: the GNSS positioning is integrated with IMU data.
- Output files: we generate step and stride results and precise ground point estimates as outputs.
3. Results
3.1. Comparison of Different GNSS Data Processing Techniques
In our study, we evaluated two GNSS data processing techniques—Moving Base (MB) and Post-Processing Kinematics (PPK)—to determine their effectiveness in reconstructing accurate foot trajectories. For MB, we used the head-mounted receiver as the base. The comparative analysis focused on several key metrics: fix rate, average number of satellites (Nsat), MAE (Mean Absolute Error) for dtep, MAE (Mean Absolute Error) for stride, average step length, the standard deviation of step length, average stride length, and the standard deviation of stride length.
The results, which are visualized in an accompanying table (Table 2), indicated that the PPK technique outperformed the MB method.
Table 2.
Table with comparison of different data processing techniques at different walking speeds.
Specifically, PPK demonstrated a higher fix rate, indicating more reliable signal reception and positional accuracy. In contrast, MB showed a tendency towards Float solutions.
In terms of positional accuracy, the MB method exhibited larger STD values compared to PPK. This suggests that MB was less consistent in its positional estimations, potentially due to its dependency on the dynamic relative positioning between the base and the rover.
The average number of satellites used was lower for MB.
When combined with IMU data, the gait analysis metrics, the average step length, and stride length were captured less accurately by MB, as evidenced by the larger standard deviations in these measurements, suggesting that even the inertial data could not compensate for the weaknesses in the MB GNSS processing in our application and in the test environment.
3.2. Comparison of Impact of Different Walking Speeds on GNSS Receiver Performance
Our findings (Table 2) indicate a trend: as walking speed increased, the GNSS receiver’s performance declined. The higher-speed condition resulted in the poorest performance metrics.
Despite the trend observed, the system’s capability to describe step and stride characteristics remained within acceptable limits, even at higher speeds.
This can be attributed to several factors: when GNSS data are less precise, the system’s error compensation mechanisms, such as zero-velocity updates (ZUPTs) in the INS integration, contribute to maintaining the accuracy of step and stride measurements, and the integration of GNSS with IMU data helps to smooth out inaccuracies in step and stride detection that might occur due to GNSS errors when using these data alone. This combination allows for a more reliable capture of dynamic gait events, such as heel-strike and toe-off, which define steps and strides.
3.3. Step and Stride Results
With the trajectories obtained, it is possible to compute temporal and spatial parameters related to the gait. Particularly interesting and useful spatial parameters include step and stride length. Stride is the distance between two consequent ground points of the same foot, while step is the distance between the consequent ground points of different feet (left to right or right to left).
Therefore, to compute such distances, it is first needed to identify the stance phases and the ground points based on the trajectory. Of course, the main role here is played by the zero-velocity points determined using the raw IMU data. Nonetheless, it is important to delete wrongly identified points and to unite points that have discontinuities. A ground point is determined by its mean and standard deviation since each measure generates numerous solution points.
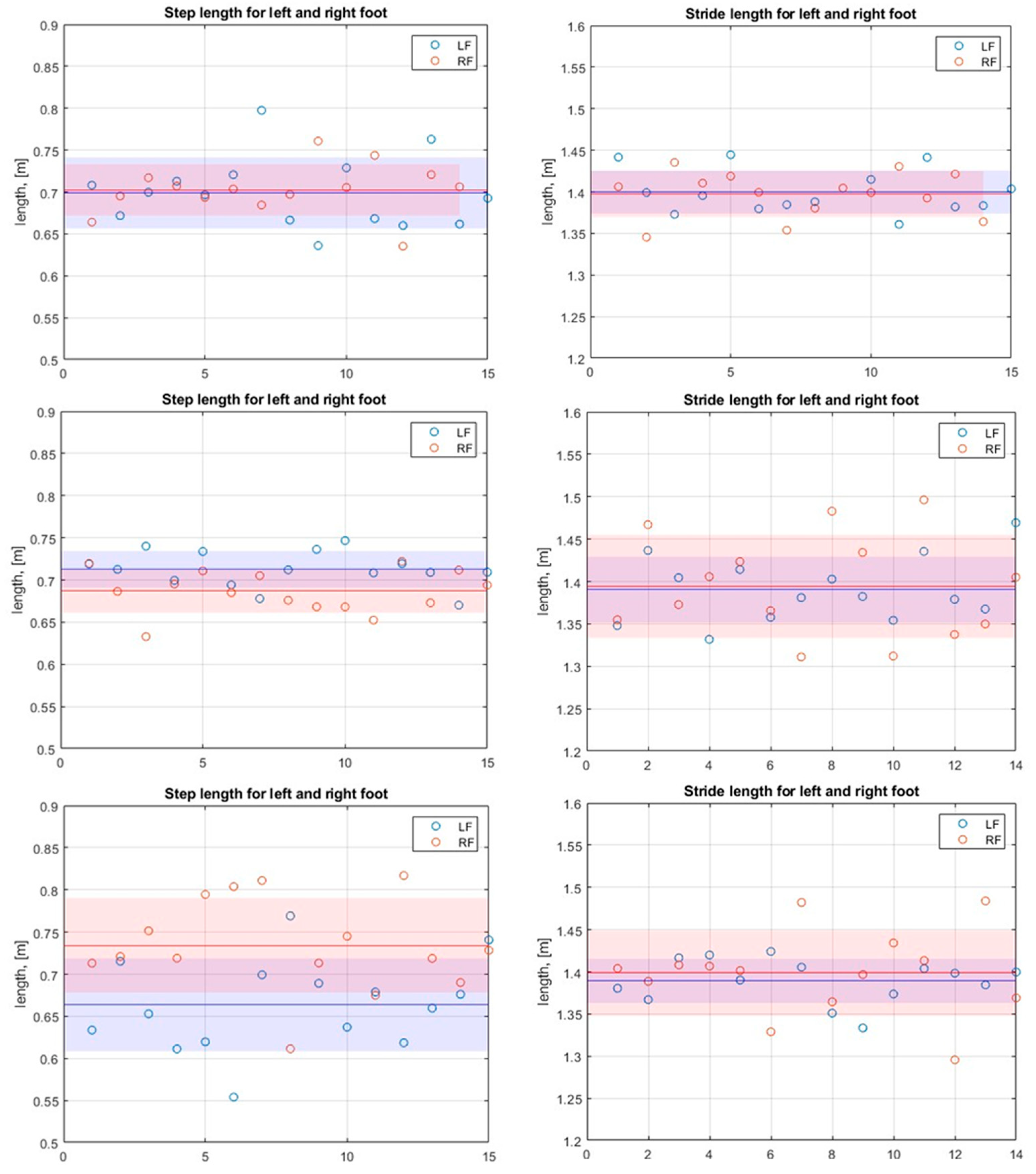
Then, step and stride are computed as Euclidean distances between the corresponding points. The fact that during this test ground marks were used for reference helped to ensure that the step length were around 0.7 m and the stride length were approximately equal to 1.4 m, that is, twice the step length.
Indeed, it can be seen from the results (Figure 6) (Table 2) that the values are close to the expectations, and the standard deviation does not exceed a few centimeters, which can be simply explained by a normal imprecision, caused by putting the foot on top of the marker. Also, the standard deviation for step and stride length grows slightly with the growing walking speed, which is explained by less precise positioning.
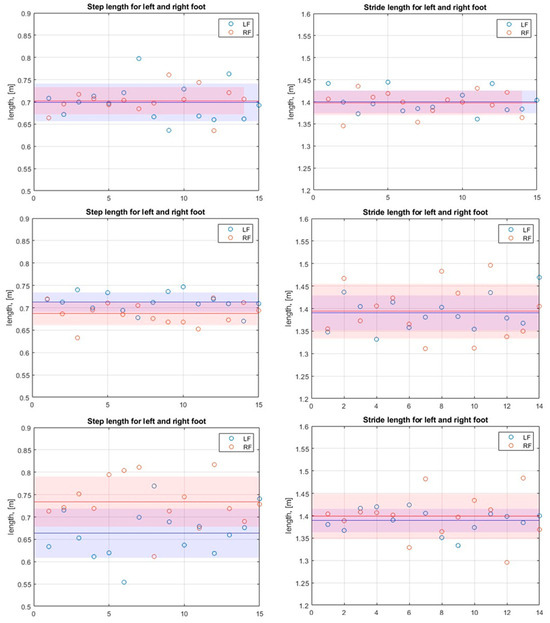
Figure 6.
Top Left: Step length at 1 step/s, Top Right: Stride length at 1 step/s; Mid Left: Step length at 1,5 step/s, Mid Right: Stride length at 1,5 step/s; Bottom Left: Step length at 2 step/s, Bottom Right: Stride length at 2 step/s; In red Sd dev. of right foot and in blue Sd. Dev. of Left foot.
4. Discussion
4.1. Summary
The integration of GNSSs with INSs, augmented by the ZUPT methodology, has shown promising results for outdoor motion tracking. By coupling these systems, positional inaccuracies commonly associated with each are mitigated, as GNSSs provide extensive coverage while INSs fill in data gaps when GNSS signals are degraded. Notably, foot movements exhibit very high dynamics during fast walking, presenting challenges to GNSSs due to fast acceleration shifts.
These dynamics increase the chances of cycle slips and Doppler effects. Using the “Airborne < 2 g” dynamic model reduced these errors. ZUPT has also proven effective in reducing drift and error accumulation, enabling accurate step and stride measurements.
4.2. Future Directions
Future research should focus on the tightly coupled and ultra-tightly coupled integration of GNSSs and Inertial Navigation Systems (INSs), which involves deeper data fusion, allowing for the improved correction of errors and robust handling of GNSS signal degradation.
We should also explore the real-time application of the technology, opening the door to practical use cases in other fields where real-time feedback would be preferred.
Author Contributions
Conceptualization, A.M., G.K. and T.C.; software, A.M. and G.K.; validation, A.M., G.K., T.C., V.S. and G.D.; formal analysis, A.M. and G.K.; data curation, A.M. and G.K.; writing—original draft preparation, A.M.; writing—review and editing, A.M., G.K., T.C., V.S. and G.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
Author Tiziano Cosso and Author Andrea Maffia are employed by the company Gter Srl. The company Gter Srl had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Kim, M.; Park, C.; Yoon, J. The Design of GNSS/IMU Loosely-Coupled Integration Filter for Wearable EPTS of Football Players. Sensors 2023, 23, 1749. [Google Scholar] [CrossRef] [PubMed]
- Pırtı, A. Evaluating the Accuracy of Post-Processed Kinematic (PPK) Positioning Technique. Geod. Cartogr. 2021, 47, 66–70. [Google Scholar] [CrossRef]
- Zhao, T.; Ahamed, M.J. Pseudo-Zero Velocity Re-Detection Double Threshold Zero-Velocity Update (ZUPT) for Inertial Sensor-Based Pedestrian Navigation. IEEE Sens. J. 2021, 21, 13772–13785. [Google Scholar] [CrossRef]
- Nilsson, J.-O.; Gupta, A.K.; Händel, P. Foot-Mounted Inertial Navigation Made Easy. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014; pp. 24–29. [Google Scholar]
- Ceron, J.D.; Martindale, C.F.; López, D.M.; Kluge, F.; Eskofier, B.M. Indoor Trajectory Reconstruction of Walking, Jogging, and Running Activities Based on a Foot-Mounted Inertial Pedestrian Dead-Reckoning System. Sensors 2020, 20, 651. [Google Scholar] [CrossRef] [PubMed]
- Hannink, J.; Ollenschläger, M.; Kluge, F.; Roth, N.; Klucken, J.; Eskofier, B.M. Benchmarking Foot Trajectory Estimation Methods for Mobile Gait Analysis. Sensors 2017, 17, 1940. [Google Scholar] [CrossRef] [PubMed]
- Benson, L.C.; Räisänen, A.M.; Clermont, C.A.; Ferber, R. Is This the Real Life, or Is This Just Laboratory? A Scoping Review of IMU-Based Running Gait Analysis. Sensors 2022, 22, 1722. [Google Scholar] [CrossRef] [PubMed]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).