
Investigation of Static and Kinematic Surveying Performance of Handheld GNSS Receiver †




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials & Methods
2.1. Static Field Measurement
2.2. Kinematic Field Measurement
3. Performance Analysis Results and Discussions
3.1. Static Scenario
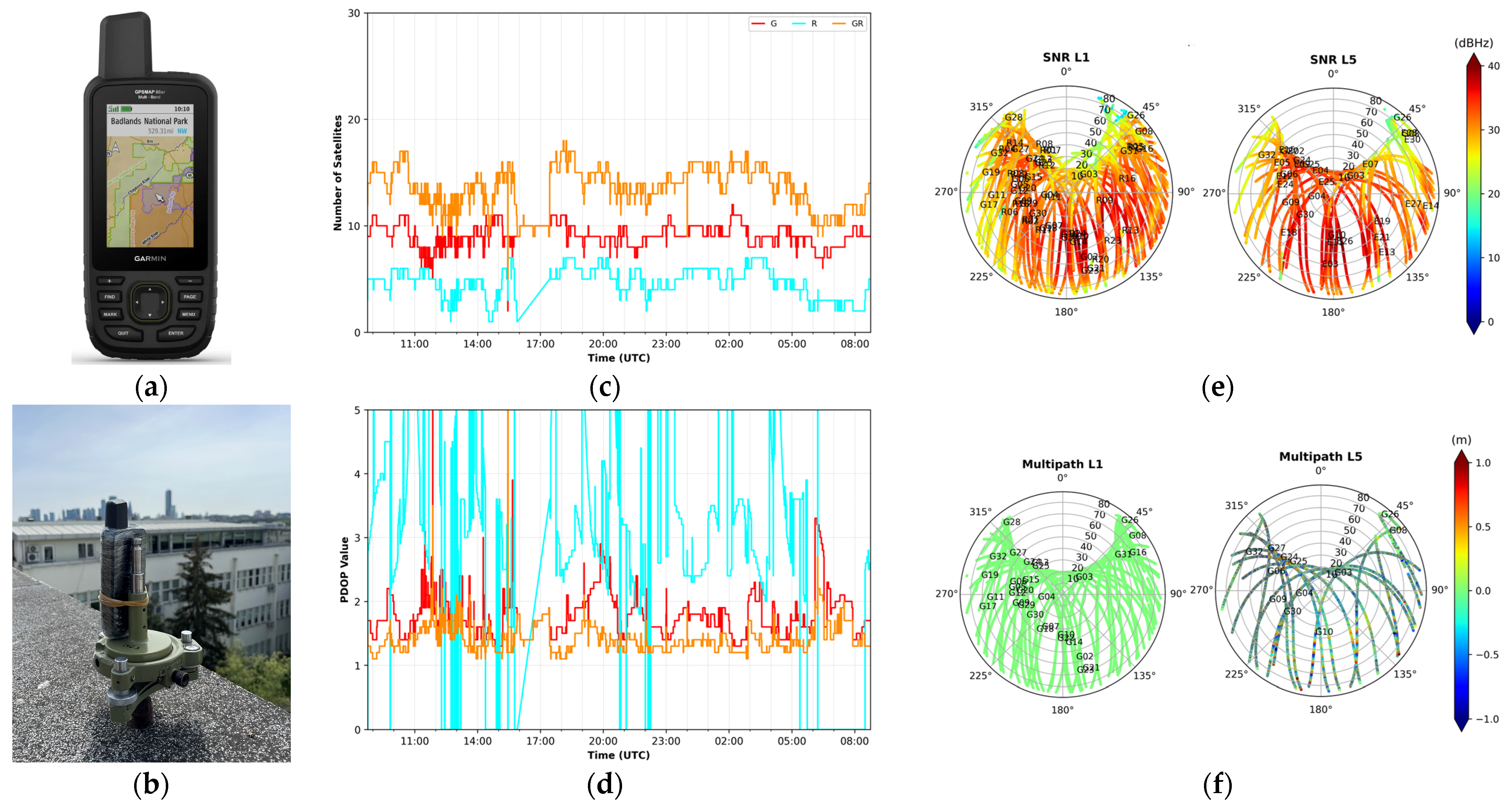
- It was seen from Figure 1c that the number of visible satellites varied between 2 and 12 for GPS (9 on average) and between 1 and 7 (5 on average) for GLONASS. In the combination of GPS and GLONASS, the maximum number of satellites reached to 18, and the average number of satellites increased by 55% when compared to G-only and 180% compared to R-only solutions, reaching 14. As seen here, multi-constellation systems significantly increased the number of satellite observations compared to single systems.
- When examining the PDOP values given in Figure 1d, it was seen that the G-only PDOP value reached a maximum of 7 (with an average of 2), and there were large fluctuations in the R-only PDOP values. Additionally, the G&R combination did not provide a significant contribution to PDOP values compared to GPS-only solutions.
- It is seen that from Figure 1e, the majority of SNR values were above 35 dBHz, which was accepted as the limit value [21]. When we looked at the code multipath values, it was seen that the L1 multipath values were in the order of 1–2 dm, whereas the L5 signals had high values, up to the meter level.
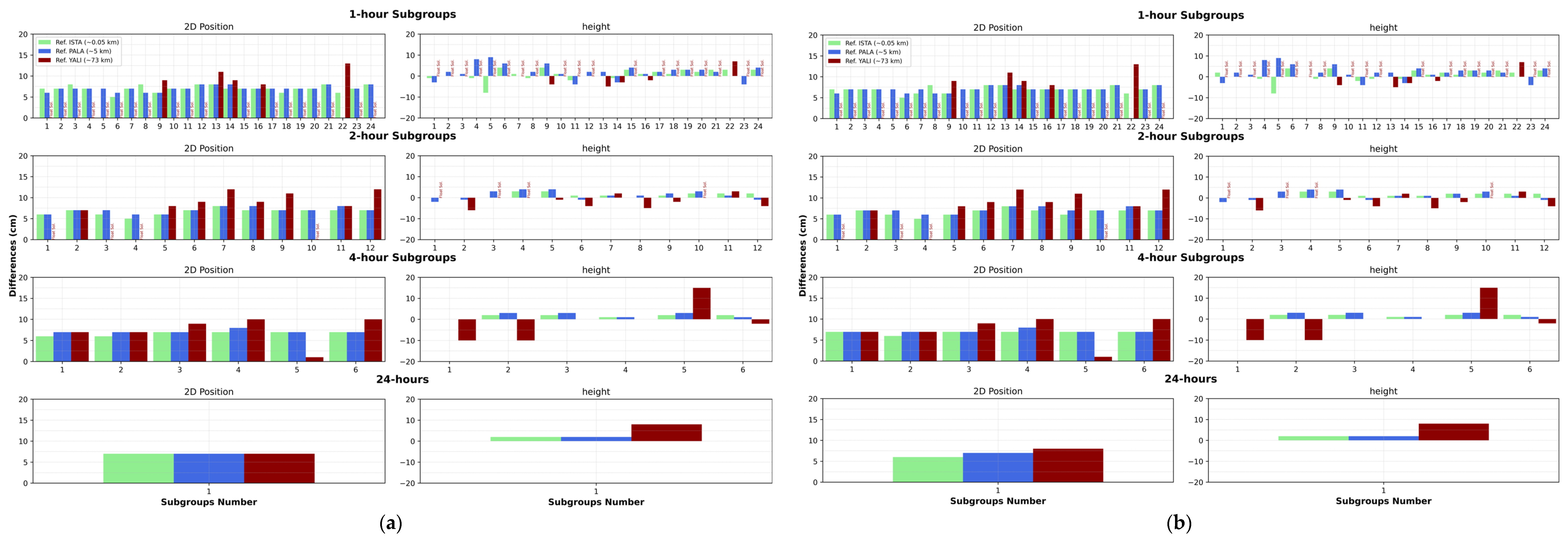
- According to Figure 3, for both G-only and G&R combinations, ambiguity-fixed solutions could be obtained in relative solutions with all occupation times of 2 h and more for a 5.1 km baseline length. This situation was similar for 1-h occupation times, with a few exceptions. The results for the 73.2 km baseline length were relatively poor, especially when the 1, 2, and 4-h sessions were used. For the 73.2 km long baseline length, a minimum of 4 h of measurement was required for the ambiguity-fixed solution. In general, it was observed that 1–2 h of occupation time can provide an ambiguity-fixed centimeter-level solution for short baselines. For a long-baseline solution, it should be made the observations at least 4 h or more occupation time for an ambiguity fixed solution. Furthermore, the G-only solutions results were found comparable to those obtained with the G&R combined solutions.
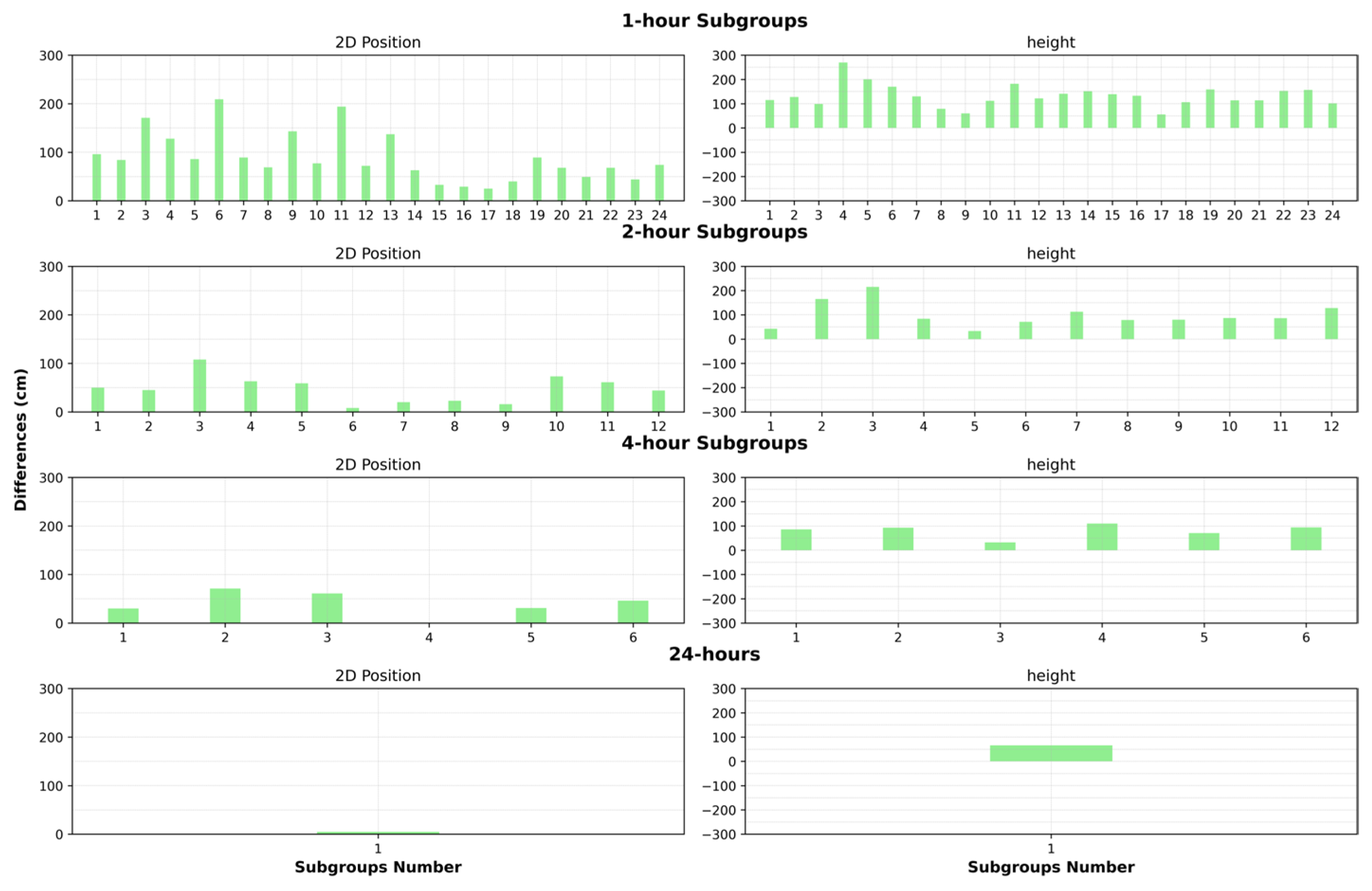
- When the static PPP solution results given in Figure 4 were investigated, it was seen that 24-h occupation time was required to achieve 2D position accuracy at the cm-level. For other subgroups (1, 2, and 4-h sessions), differences in the order of meters-to-decimeter level were obtained. The most probable reason for such poor results in the PPP solution was that although the Garmin receiver collects GPS L1&L5 and GLONASS L1 signals, the CSRS-PPP service does not use the L5 signal and provides a solution using the L1 frequency only (i.e., single frequency solutions).
3.2. Kinematic Scenario
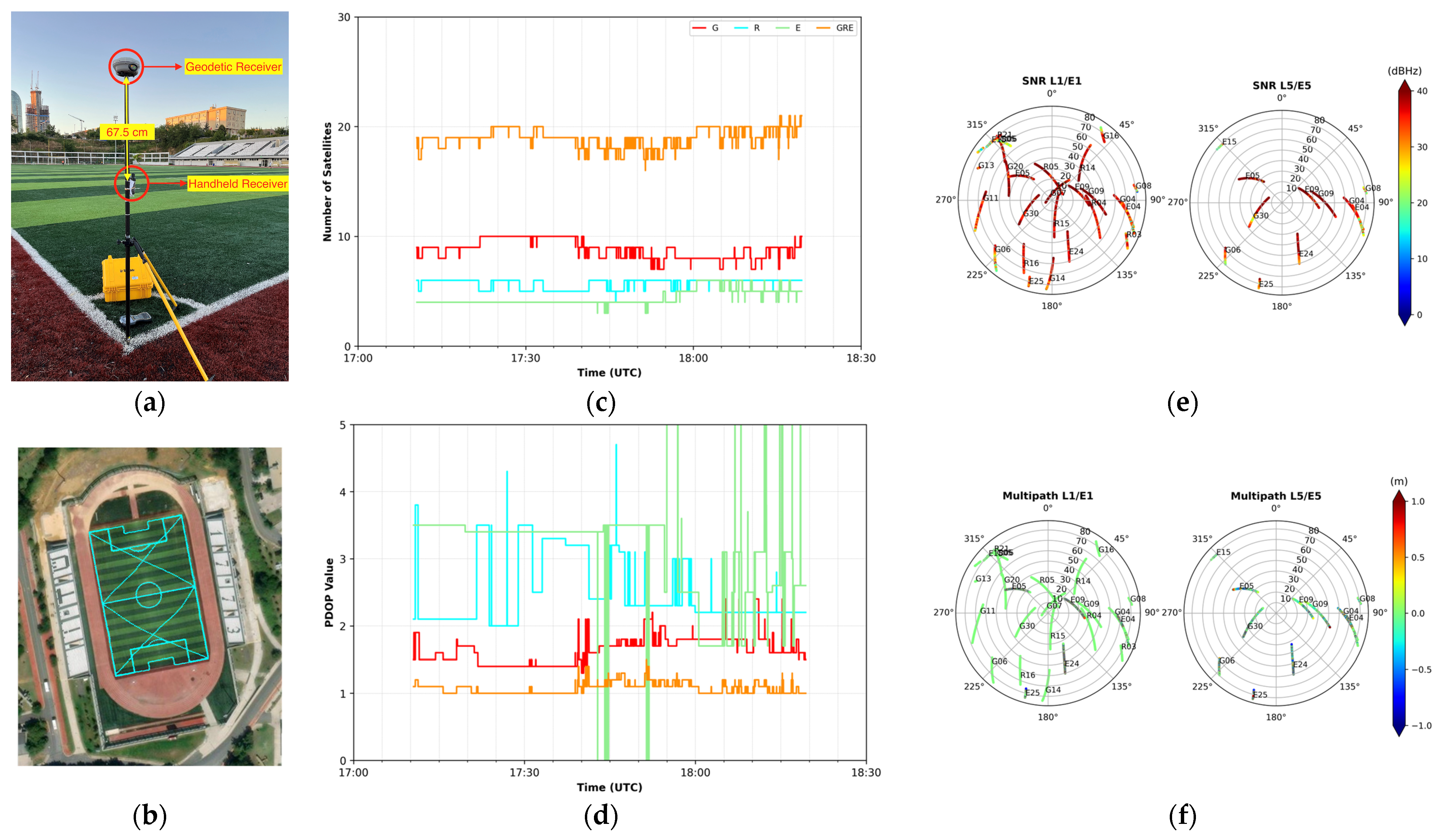
- When Figure 2c was examined, it was seen that the number of satellites varied between 7 and 10 for GPS (9 on average), 4 to 6 for GLONASS (6 on average), and also 3 and 6 for Galileo (4 on average). With the combination of GPS, GLONASS, and Galileo, the maximum number of satellites increased to 21, and the average number of satellites significantly increased to 14 compared to the single system. As seen here, multi-constellation observations significantly increased the number of satellites compared to single-system observations.
- When looking at the PDOP values (Figure 2d), it was seen that the maximum PDOP value reached 2, 5, and 8 for GPS, GLONASS, and Galileo satellites, respectively. Unlike static measurements, it was seen that GLONASS satellites had better PDOP values in kinematic measurements. It was also observed that there were fluctuations in Galileo PDOP values. In triple-configuration, an average PDOP value of around 1 was reached, with significant improvements compared to single systems.
- When Figure 2e,f were examined, it was seen that the majority of SNR values were above 35 dBHz. When we looked at the multipath values, it was seen that the multipath values were in the order of 1–2 dm for L1/E1 signals. On the other hand, it seemed that the multipath effect was greater for L5/E5 signals.
- Looking at the differences given in Figure 5, it can be seen that there were cm-level differences in both the 2D position (as a maximum of ~8 cm) and the height (as a maximum of ~5 cm) in the initial (static) part of the kinematic measurements for the G-only relative solution. For the kinematic chain (started after the static time period), it was seen that the differences reached to a couple of decimeters in horizontal and height components. However, it has been observed that the solution made with the GRE combination improves the solution’s performance.
- Looking at the kinematic CSRS-PPP results given in Figure 5c, it can be seen that the performance of the kinematic PPP technique is far from meeting the requirements of many geodetic applications.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Kouba, J.; Lahaye, F.; Tétreault, P. Precise Point Positioning. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 723–751. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. GNSS Precise Point Positioning. In Position, Navigation, and Timing Technologies in the 21st Century; Morton, Y.T.J., Diggelen, F., Spilker, J.J., Parkinson, B.W., Lo, S., Gao, G., Eds.; Wiley: Hoboken, NJ, USA, 2020; pp. 503–528. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Li, X.; Shen, Z.; Han, J.; Li, L.; Wang, B. Review of PPP–RTK: Achievements, Challenges, and Opportunities. Satell. Navig. 2022, 3, 28. [Google Scholar] [CrossRef]
- Cheng, S. Quality Analysis for Satellite Bias Estimation and GNSS PPP Ambiguity Resolution. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 3 November 2017; pp. 2219–2234. [Google Scholar] [CrossRef]
- Chen, C.; Xiao, G.; Chang, G.; Xu, T.; Yang, L. Assessment of GPS/Galileo/BDS Precise Point Positioning with Ambiguity Resolution Using Products from Different Analysis Centers. Remote Sens. 2021, 13, 3266. [Google Scholar] [CrossRef]
- Laurichesse, D.; Rouch, C.; Marmet, F.-X.; Pascaud, M. Smartphone Applications for Precise Point Positioning. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 3 November 2017; pp. 171–187. [Google Scholar] [CrossRef]
- Wen, Q.; Geng, J.; Li, G.; Guo, J. Precise Point Positioning with Ambiguity Resolution Using an External Survey-Grade Antenna Enhanced Dual-Frequency Android GNSS Data. Measurement 2020, 157, 107634. [Google Scholar] [CrossRef]
- Zangenehnejad, F.; Gao, Y. GNSS Smartphones Positioning: Advances, Challenges, Opportunities, and Future Perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef] [PubMed]
- Tomaštík, J.; Varga, M.; Everett, T. Raw GNSS Data Collected Using Smartphones and Low-Cost Receiver under Optimal and Sub-Optimal Conditions. Data Brief 2024, 53, 110148. [Google Scholar] [CrossRef] [PubMed]
- Hill, C.J.; Moore, T.; Dumville, M. GRINGO: A RINEX Logger for Hand-Held GPS Receivers. In Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999), Nashville, TN, USA, 14 September 1999; pp. 1647–1652. [Google Scholar]
- El-Mowafy, A. Decimetre Level Mapping Using Differential Phase Measurements of GPS Handheld. Surv. Rev. 2005, 38, 47–57. [Google Scholar] [CrossRef]
- Lachapelle, G.; Gratton, P.; Horrelt, J.; Lemieux, E. Performance Assessment of a Low Cost Hand Held GNSS Receiver’s Raw Code and Carrier Phase Data. In Proceedings of the 16th World Congress of the International Association of Institutes of Navigation, Tokyo, Japan, 28 November 2018. [Google Scholar]
- Lachapelle, G.; Gratton, P.; Horrelt, J.; Lemieux, E.; Broumandan, A. Evaluation of a Low Cost Hand Held Unit with GNSS Raw Data Capability and Comparison with an Android Smartphone. Sensors 2018, 18, 4185. [Google Scholar] [CrossRef] [PubMed]
- Wanninger, L.; Heßelbarth, A.; Frevert, V. Garmin GPSMAP 66sr: Assessment of Its GNSS Observations and Centimeter-Accurate Positioning. Sensors 2022, 22, 1964. [Google Scholar] [CrossRef] [PubMed]
- Alkan, R.M.; Erol, S.; Mutlu, B. Centimeter-Accurate Positioning with Handheld GNSS Receiver. In Proceedings of the XXXIII International Symposium on Modern Technologies, Education and Professional Practice in Geodesy and Related Fields, Sofia, Bulgaria, 1 November 2023; pp. 433–451. [Google Scholar]
- GPSMAP® 66sr Multi-Band GPS Handheld with Sensors and Topo Maps Specs. Available online: https://www.garmin.com/en-US/p/707627#specs (accessed on 13 April 2024).
- Lau, L.; Cross, P. Use of Signal-To-Noise Ratios for Real-Time GNSS Phase Multipath Mitigation. In Proceedings of the National Navigation Conference NAV 05, London, UK, 1 November 2005. [Google Scholar]
- Banville, S.; Hassen, E.; Lamothe, P.; Farinaccio, J.; Donahue, B.; Mireault, Y.; Goudarzi, M.A.; Collins, P.; Ghoddousi-Fard, R.; Kamali, O. Enabling Ambiguity Resolution in CSRS-PPP. Navigation 2021, 68, 433–451. [Google Scholar] [CrossRef]
- Lau, L.; Mok, E. Improvement of GPS Relative Positioning Accuracy by Using SNR. J. Surv. Eng. 1999, 125, 185–202. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alkan, R.M.; Erol, S.; Mutlu, B.; Bıyık, M.Y. Investigation of Static and Kinematic Surveying Performance of Handheld GNSS Receiver. Eng. Proc. 2025, 88, 24. https://doi.org/10.3390/engproc2025088024
Alkan RM, Erol S, Mutlu B, Bıyık MY. Investigation of Static and Kinematic Surveying Performance of Handheld GNSS Receiver. Engineering Proceedings. 2025; 88(1):24. https://doi.org/10.3390/engproc2025088024
Chicago/Turabian StyleAlkan, Reha Metin, Serdar Erol, Bilal Mutlu, and Muhammed Yahya Bıyık. 2025. "Investigation of Static and Kinematic Surveying Performance of Handheld GNSS Receiver" Engineering Proceedings 88, no. 1: 24. https://doi.org/10.3390/engproc2025088024
APA StyleAlkan, R. M., Erol, S., Mutlu, B., & Bıyık, M. Y. (2025). Investigation of Static and Kinematic Surveying Performance of Handheld GNSS Receiver. Engineering Proceedings, 88(1), 24. https://doi.org/10.3390/engproc2025088024