
AI-Driven Longitudinal Pitch Attitude Control for Enhanced Flight Control Dynamics †


Abstract
1. Introduction
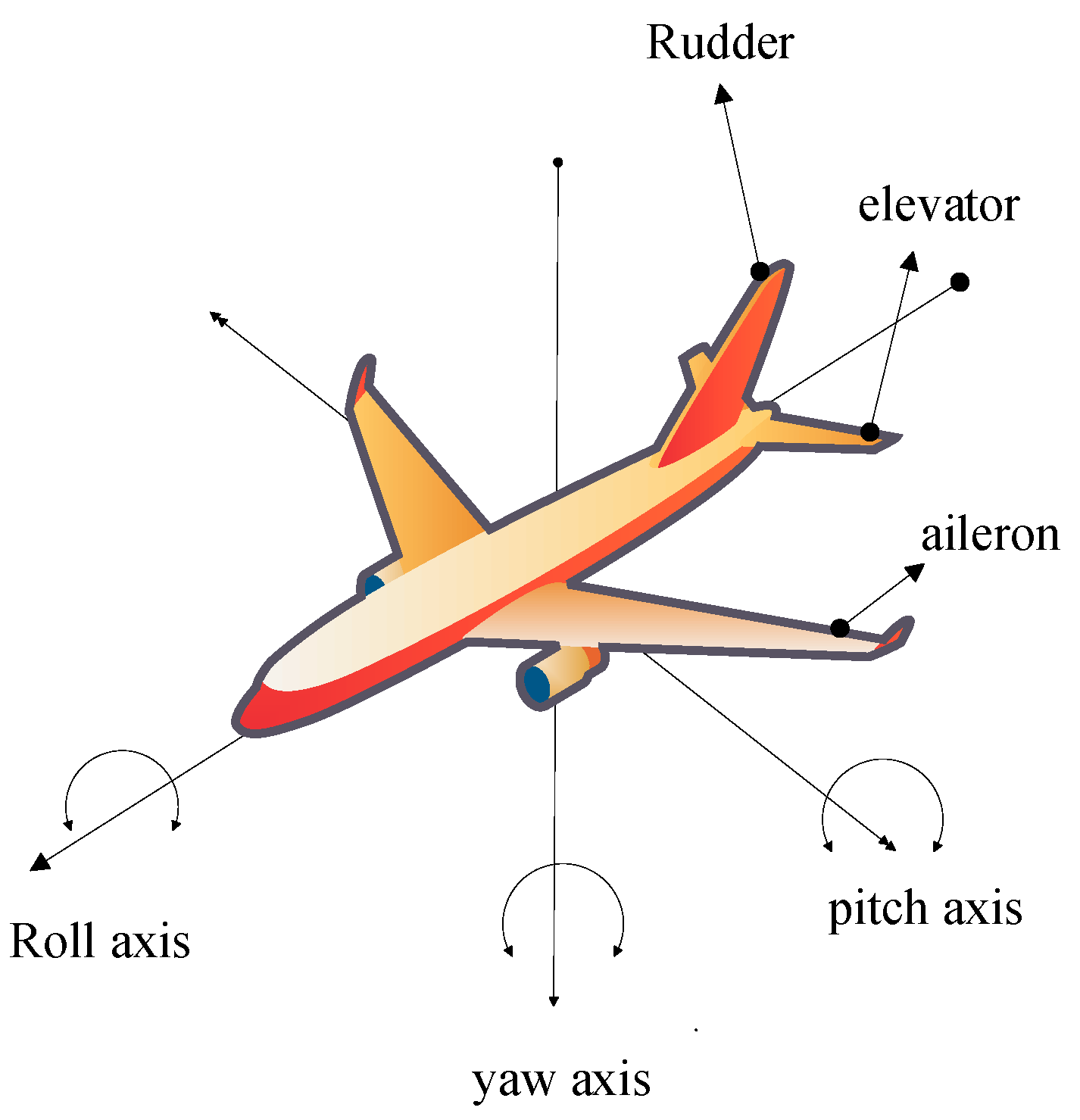
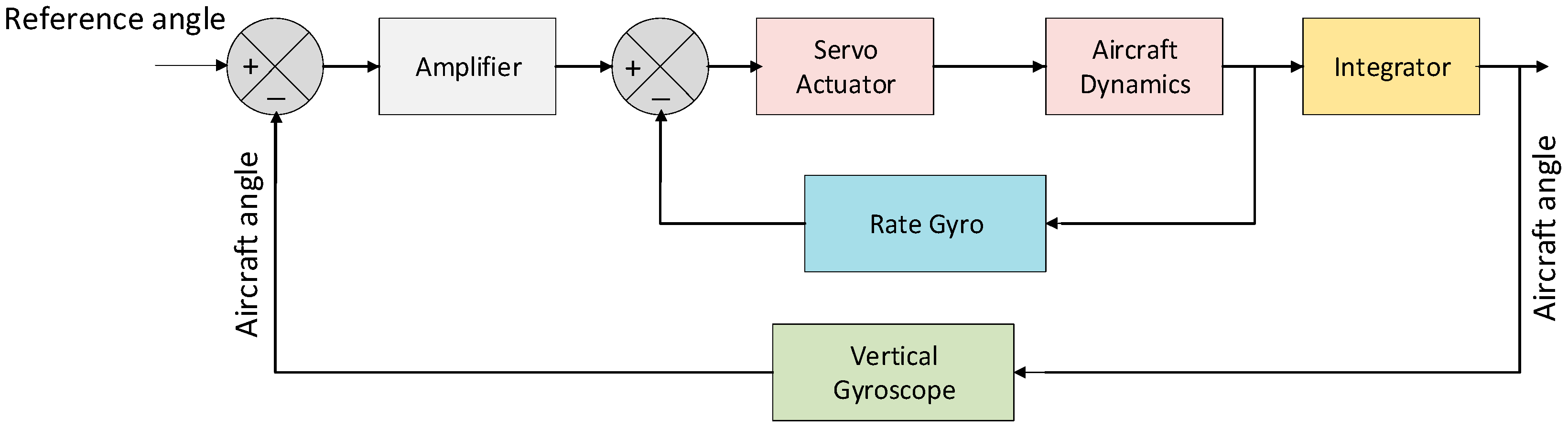
2. Modeling of the Pitch Attitude Controller for the Aircraft
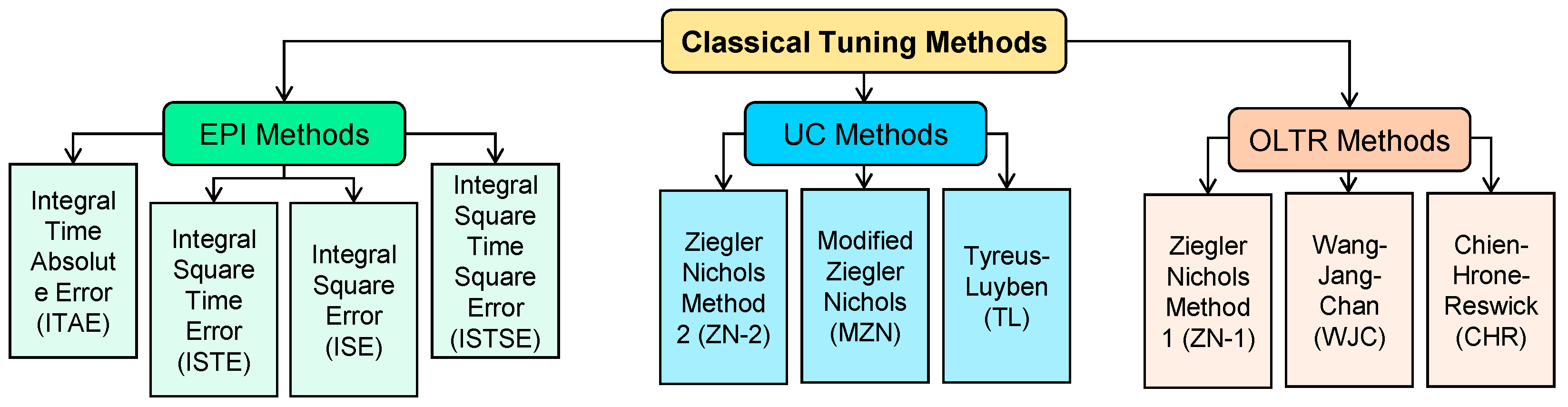
2.1. Classical PID Controller Design
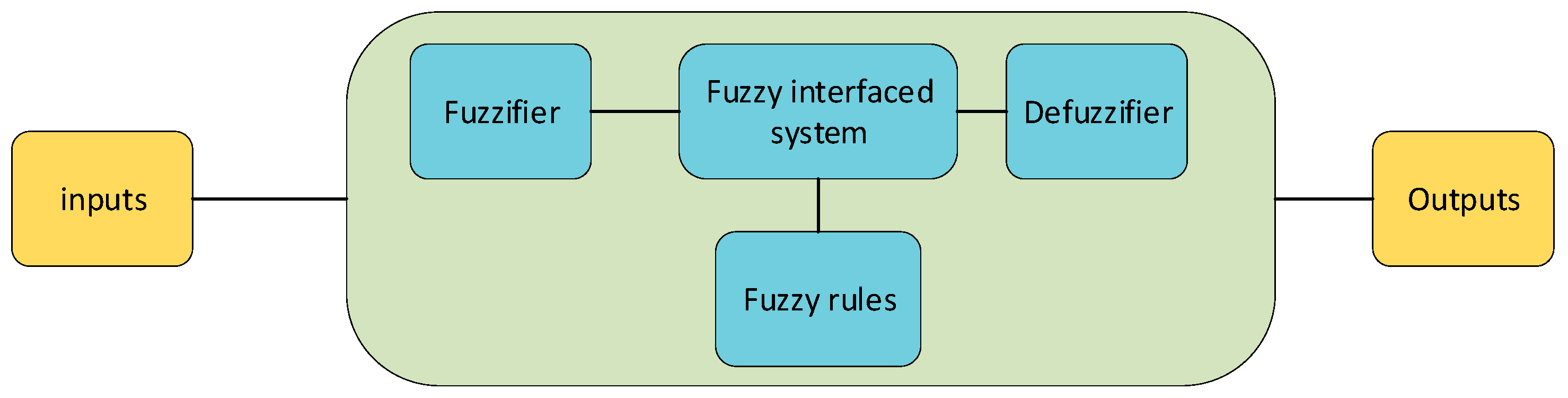
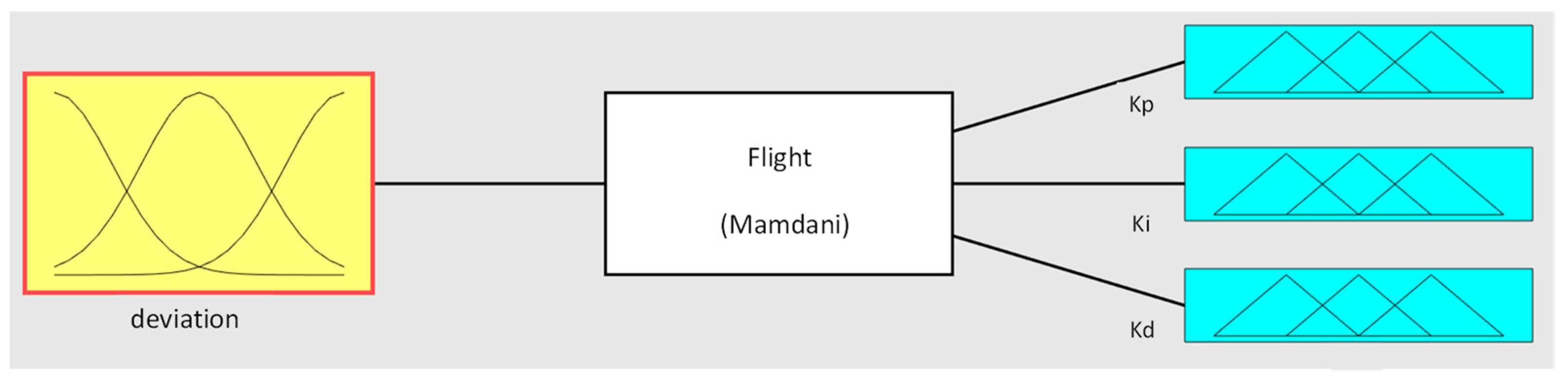
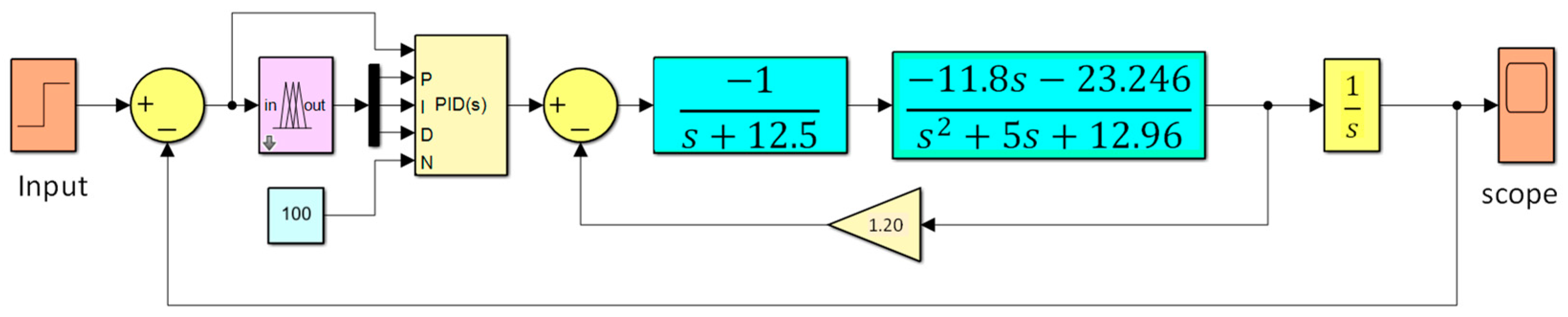
2.2. Fuzzy Logic PID Controller Design
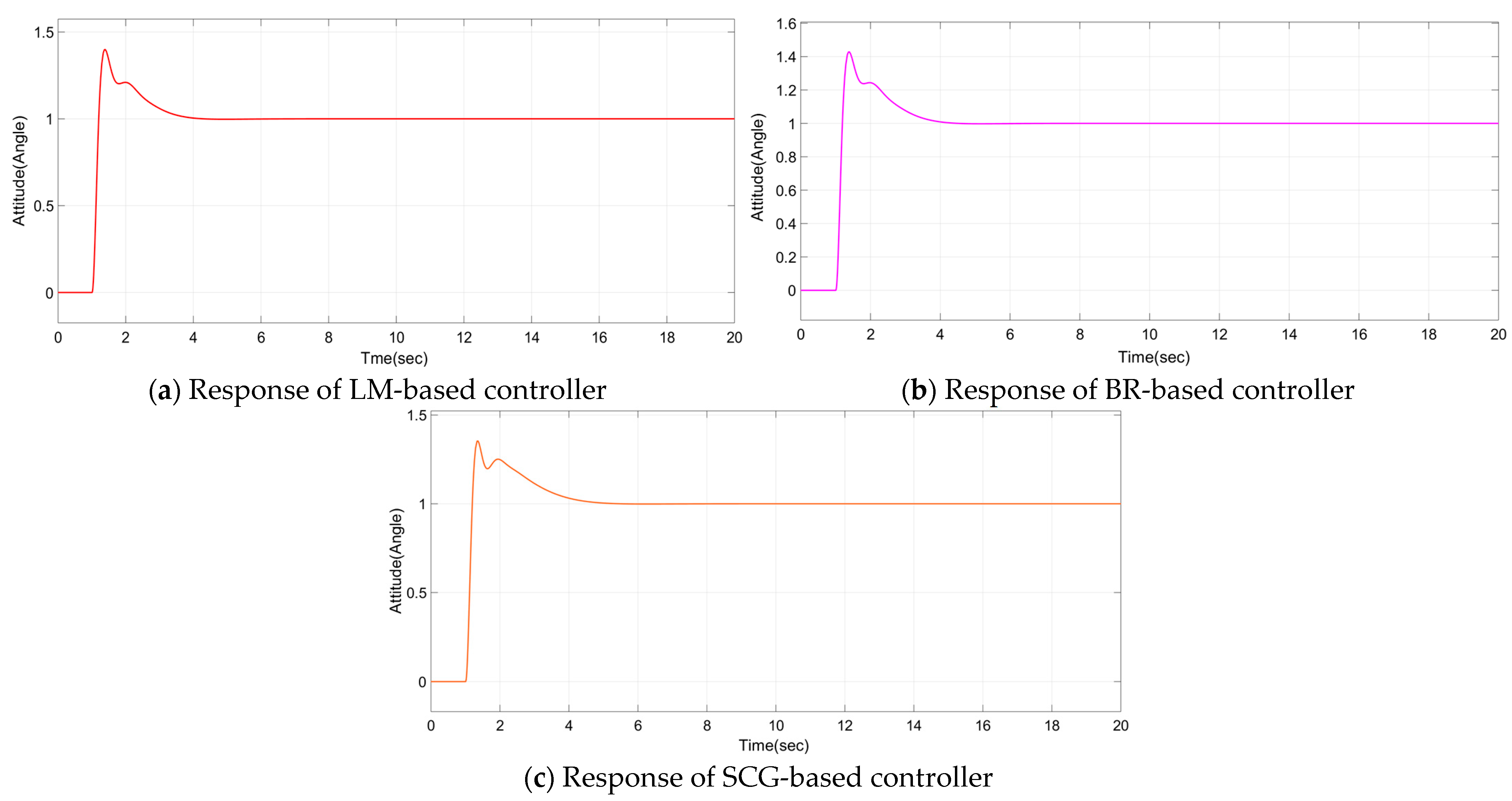
2.3. Artificial Neural Networks PID (ANN-PID) Controller Design
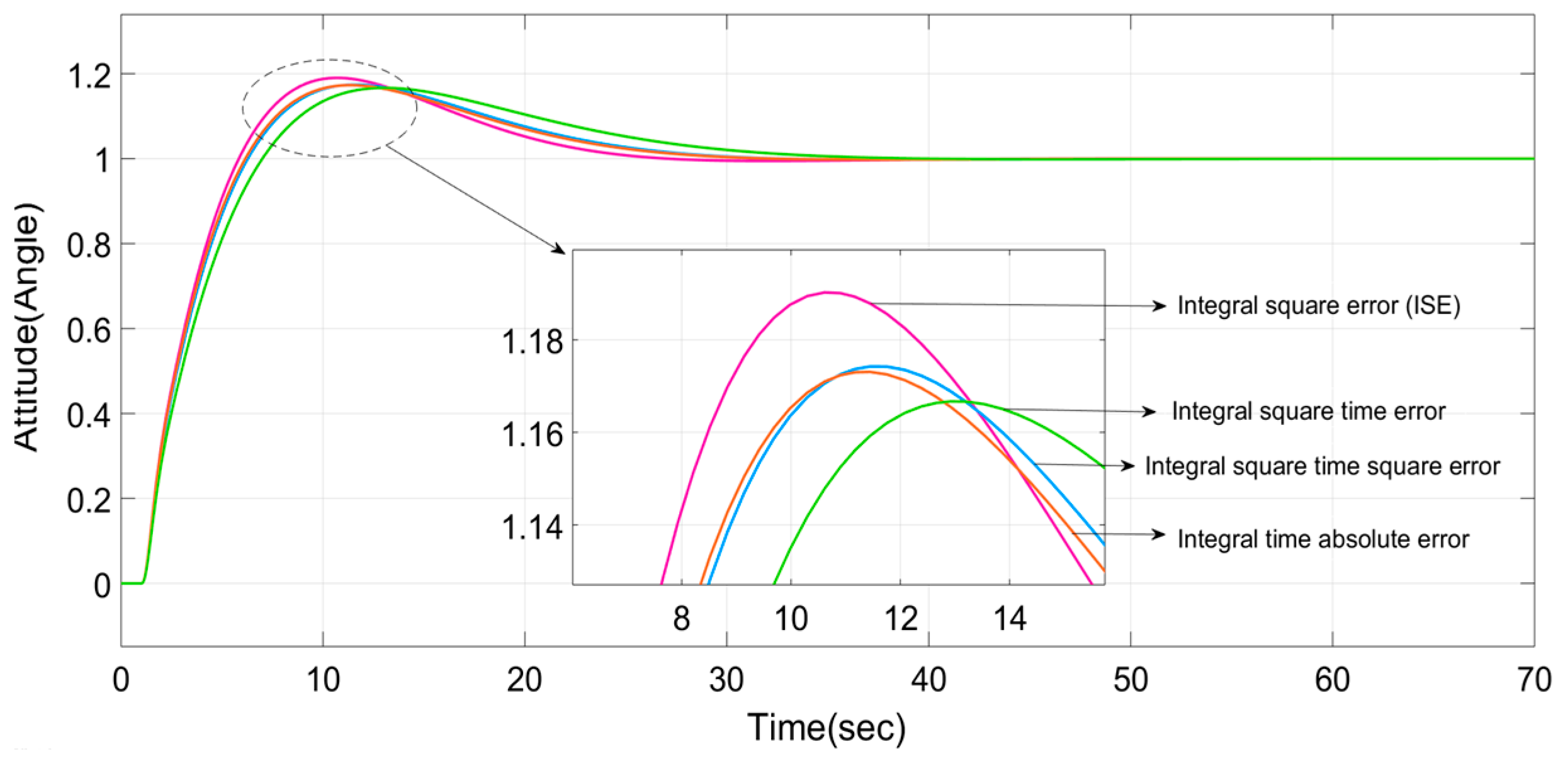
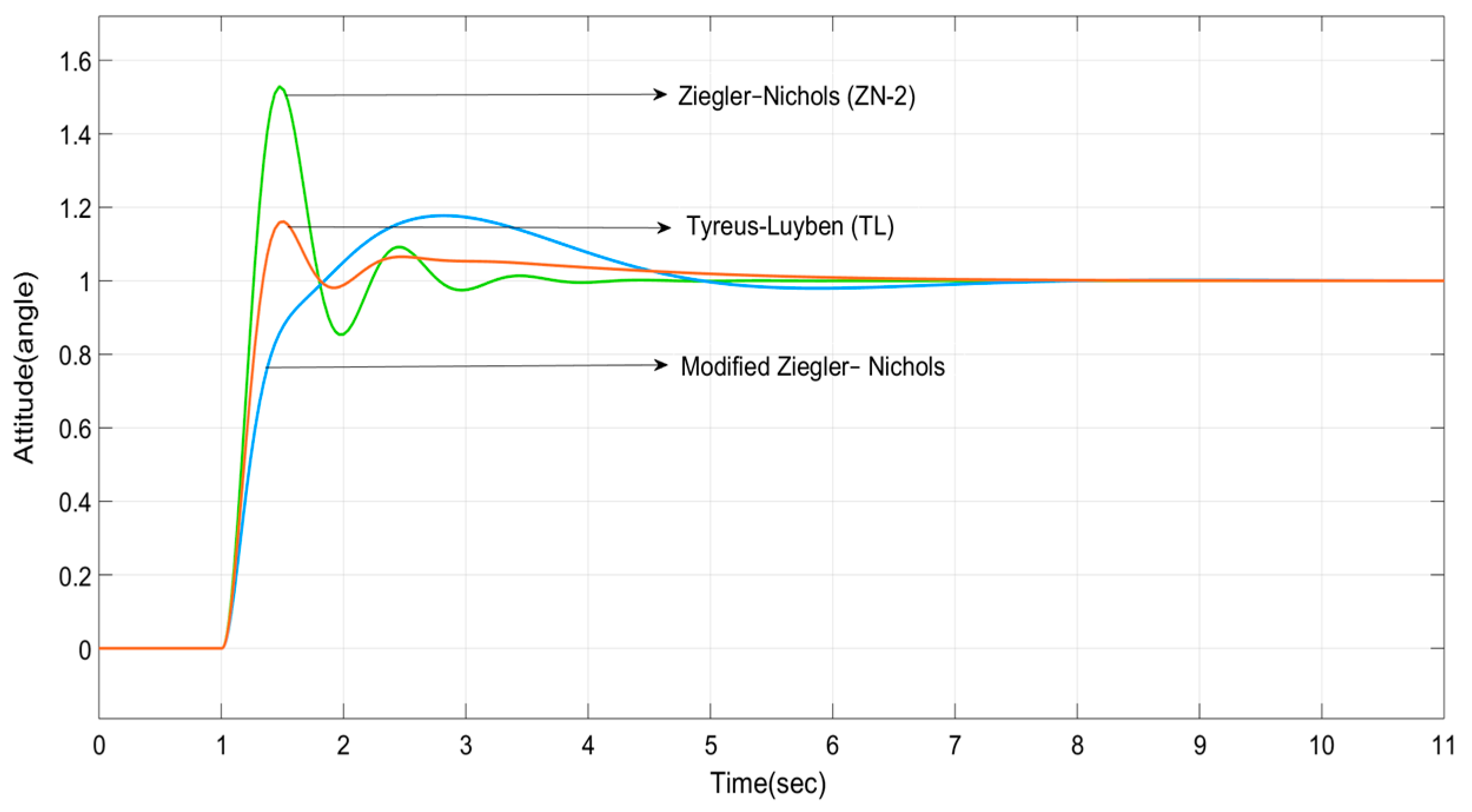
3. Simulation Results and Analysis
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chakravarthi, M.K.; Kumar, Y.V.P.; Reddy, G.P. Potential Technological Advancements in the Future of Process Control and Automation. In Proceedings of the 2024 IEEE Open Conference of Electrical, Electronic and Information Sciences (eStream), Vilnius, Lithuania, 25 April 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Karthik, R.; Hari, A.S.; Pavan Kumar, Y.V.; Pradeep, D.J. Modelling and Control Design for Variable Speed Wind Turbine Energy System. In Proceedings of the 2020 International Conference on Artificial Intelligence and Signal Processing (AISP), Amaravati, India, 10–12 January 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Pavan Kumar, Y.V.; Bhimasingu, R.; Jyothi, M.; Ramakrishna, B. Real Time and High Fidelity Controller Design for Hardware In the Loop (HIL) Testing of Flight Attitude Control. In Proceedings of the 2014 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kanyakumari, India, 10–11 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1217–1222. [Google Scholar] [CrossRef]
- Srikar, K.V.P.; Kumar, Y.V.P.; Pradeep, D.J.; Reddy, C.P. Investigation on PID Controller Tuning Methods for Aircraft Fuselage Temperature Control. In Proceedings of the 2020 International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Marrakech, Morocco, 25–27 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Zhongli, M.; Huixin, L.; Qianqian, L.; Yanming, G.; Zhongli, M.; Zuoyong, L. Design of Flight Attitude Control Model for the Mini-Quadrotor. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1433–1437. [Google Scholar] [CrossRef]
- Hongpeng, T.; Wei, B. Stability Control of Flight Attitude Angle for Four Rotor Aircraft. In Proceedings of the 2018 IEEE 9th International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 6–9 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 332–336. [Google Scholar] [CrossRef]
- Xin, W. Design of Fine Attitude Flight Control for a Highspeed Test Aircraft. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 22–24 May 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1961–1964. [Google Scholar] [CrossRef]
- Chen, H.; He, K.; Qian, W. Attitude Control of UAV Based on PI Dynamic Inversion. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 10668–10672. [Google Scholar] [CrossRef]
- Huang, B.; Li, A.J.; Guo, Y.; Wang, C.Q.; Zhang, Y. Fixed-Time Attitude Control for Spacecraft without Unwinding. In Proceedings of the 2017 International Conference on Mechanical, System and Control Engineering (ICMSC), St. Petersburg, Russia, 19–21 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 333–337. [Google Scholar] [CrossRef]
- Calugaru, G.; Danisor, E.-A. Improved Aircraft Attitude Control Using Generalized Predictive Control Method. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 29 May–1 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 101–106. [Google Scholar] [CrossRef]
- Xinghua, L. Flight Stability Control of Unmanned Aerial Vehicle Based on Micro Inertia Attitude Adjustment. In Proceedings of the 2018 IEEE International Conference of Safety Produce Informatization (IICSPI), Chongqing, China, 10–12 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 276–280. [Google Scholar] [CrossRef]
- Yoshitani, N.; Hashimoto, S.; Kimura, T.; Motohashi, K.; Ueno, S. Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 3211–3216. [Google Scholar]
- Rao, J.; Gao, T.; Jiang, Z.; Gong, Z. Flight Control System of a Robotic Portable Unmanned Aerial Vehicle. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control, Shenyang, China, 27–29 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 540–544. [Google Scholar] [CrossRef]
- Rasheed, A. Helicopter Attitude Control. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Ke, L.; Chun-Sheng, L.; Zheng-Zhong, W.; Qi-You, C. Design Flight Control System for UAV Full Envelope Flight. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 487–490. [Google Scholar] [CrossRef]
- Ma, S.; Sun, M.; Chen, Z. Interactive ADRC Design for Flight Attitude Control. In Proceedings of the 2017 6th Data Driven Control and Learning Systems (DDCLS), Chongqing, China, 26–27 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 611–616. [Google Scholar] [CrossRef]
- Xin, W.; Feng, D.; Yi, L. Attitude control of unmanned hypersonic test vehicle. In Proceedings of the 2nd International Symposium on Systems and Control in Aerospace and Astronautics, Shenzhen, China, 10–12 December 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, H.; Cheng, X. A Design of Flight Control System for Four-Rotor Micro Aerial Vehicle. In Proceedings of the 2015 International Conference on Computational Intelligence and Communication Networks (CICN), Jabalpur, India, 12–14 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1447–1451. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, W.; Guo, C.; Zhang, Z.; Li, P. Simulation Research on Roll Attitude Initialization Algorithm for Fixed Wing Canards. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1292–1296. [Google Scholar] [CrossRef]
- Dong, Z.; Chen, J.; Song, C.; Cao, H. Design of Longitudinal Control System for Target Missiles Based on Fuzzy Adaptive PID Control. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 398–402. [Google Scholar] [CrossRef]
- Ahmed, W.; Li, Z.; Istan, M.; Anwar, M.B. Multi-Objective Eigenstructure Assignment-PID Based Controller Design for Longitudinal Motion of Aircraft. In Proceedings of the 2019 5th International Conference on Control Science and Systems Engineering (ICCSSE), Shanghai, China, 14–16 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 40–44. [Google Scholar] [CrossRef]
- Wang, S.; Li, B.; Geng, Q. Research of RBF Neural Network PID Control Algorithm for Longitudinal Channel Control of Small UAV. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1824–1827. [Google Scholar] [CrossRef]
- Zhang, D.; Chen, Z.; Xi, L. Adaptive Dual Fuzzy PID Control Method for Longitudinal Attitude Control of Tail-Sitter UAV. In Proceedings of the 2016 22nd International Conference on Automation and Computing (ICAC), Colchester, UK, 7–8 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 378–382. [Google Scholar] [CrossRef]
- Hamid, T.; Babar, M.Z.; Hassan, M.U.; Hussain, M.F. Pitch Attitude Control for an Aircraft Using Linear Quadratic Integral Control Strategy. In Proceedings of the 2019 22nd International Multitopic Conference (INMIC), Islamabad, Pakistan, 29–30 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Algorithm | KP | KI | KD |
|---|---|---|---|---|
| OLTR | ZN-1 algorithm | 3.5646 | 0.45 | - |
| WJC algorithm | 2.0101 | 0.2531 | - | |
| CHR algorithm | 1.3862 | 0.4813 | - | |
| EPI | ISE algorithm | 2.772 | 0.418 | - |
| ISTE algorithm | 2.683 | 0.337 | - | |
| ISTSE algorithm | 2.756 | 0.3519 | - | |
| ITAE algorithm | 2.4263 | 0.2551 | - | |
| UC | ZN-2 algorithm | 44.88 | 111.47 | 4.5149 |
| MZN algorithm | 14.96 | 18.57 | 4.01 | |
| TL algorithm | 34.005 | 19.957 | 4.1791 |
| Method | Rise Time (s) | Delay Time (s) | Peak Time (s) | Peak Overshoot (%) | Settling Time (s) | |
|---|---|---|---|---|---|---|
| OLTR | ZN-1 | 2.318 | 5.375 | 9.41 | 0.1445 | 41 |
| WJC | 3.3145 | 7.342 | 13.501 | 0.2074 | 56 | |
| CHR | 3.555 | 6.3165 | 11.456 | 0.3984 | 85 | |
| EPI | ISE | 2.675 | 5.83 | 10.615 | 0.19 | 46 |
| ISTE | 2.767 | 6.27 | 11.45 | 0.174 | 52 | |
| ISTSE | 6.152 | 11.455 | 11.455 | 0.173 | 53 | |
| ITAE | 6.997 | 12.92 | 12.92 | 0.1667 | 58 | |
| UC | ZN-2 | 1.165 | 1.265 | 1.475 | 0.53 | 6.5 |
| MZN | 1.233 | 1.843 | 2.8 | 0.177 | 7.8 | |
| TL | 1.1867 | 1.234 | 1.47 | 0.16 | 10.5 | |
| Superior Method | ZN-2 | TL | TL | TL | TL | |
| Method | Rise Time (s) | Delay Time (s) | Peak Time (s) | Peak Overshoot (%) | Settling Time (s) |
|---|---|---|---|---|---|
| LM | 1.2017 | 1.1211 | 1.3945 | 39.94 | 6.5 |
| BR | 1.1936 | 1.1169 | 1.3648 | 42.84 | 6.7 |
| SCG | 1.1979 | 1.1187 | 1.3943 | 35.89 | 9 |
| Superior Method | BR | BR | BR | SCG | LM |
| Controller | Rise Time (s) | Delay Time (s) | Peak Time (s) | Peak Overshoot (%) | Settling Time (s) |
|---|---|---|---|---|---|
| Proposed ANN-PID | 1.2066 | 1.1235 | 1.3773 | 33.37 | 6.7 |
| Proposed Fuzzy-PID | 1.1938 | 1.1169 | 1.3517 | 42.91 | 4.65 |
| Classical TL-PID | 1.234 | 1.1867 | 1.47 | 16 | 10.5 |
| Superior Method | Fuzzy-PID | Fuzzy-PID | Fuzzy-PID | TL-PID | Fuzzy-PID |
| Reduction with Fuzzy-PID | 3.26% | 5.88% | 8.05% | 55.71% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, Y.V.P. AI-Driven Longitudinal Pitch Attitude Control for Enhanced Flight Control Dynamics. Eng. Proc. 2024, 82, 25. https://doi.org/10.3390/ecsa-11-20483
Kumar YVP. AI-Driven Longitudinal Pitch Attitude Control for Enhanced Flight Control Dynamics. Engineering Proceedings. 2024; 82(1):25. https://doi.org/10.3390/ecsa-11-20483
Chicago/Turabian StyleKumar, Yellapragada Venkata Pavan. 2024. "AI-Driven Longitudinal Pitch Attitude Control for Enhanced Flight Control Dynamics" Engineering Proceedings 82, no. 1: 25. https://doi.org/10.3390/ecsa-11-20483
APA StyleKumar, Y. V. P. (2024). AI-Driven Longitudinal Pitch Attitude Control for Enhanced Flight Control Dynamics. Engineering Proceedings, 82(1), 25. https://doi.org/10.3390/ecsa-11-20483