
Detection of “Legbreaker” Antipersonnel Landmines by Analysis of Aerial Thermographic Images of the Soil †

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
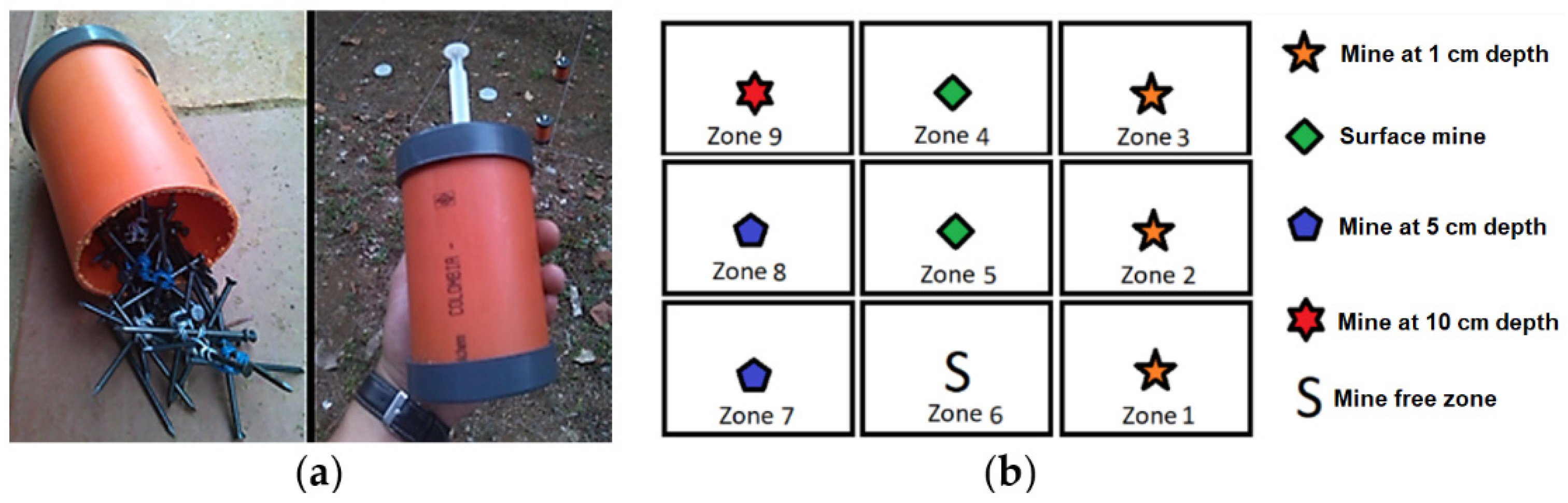
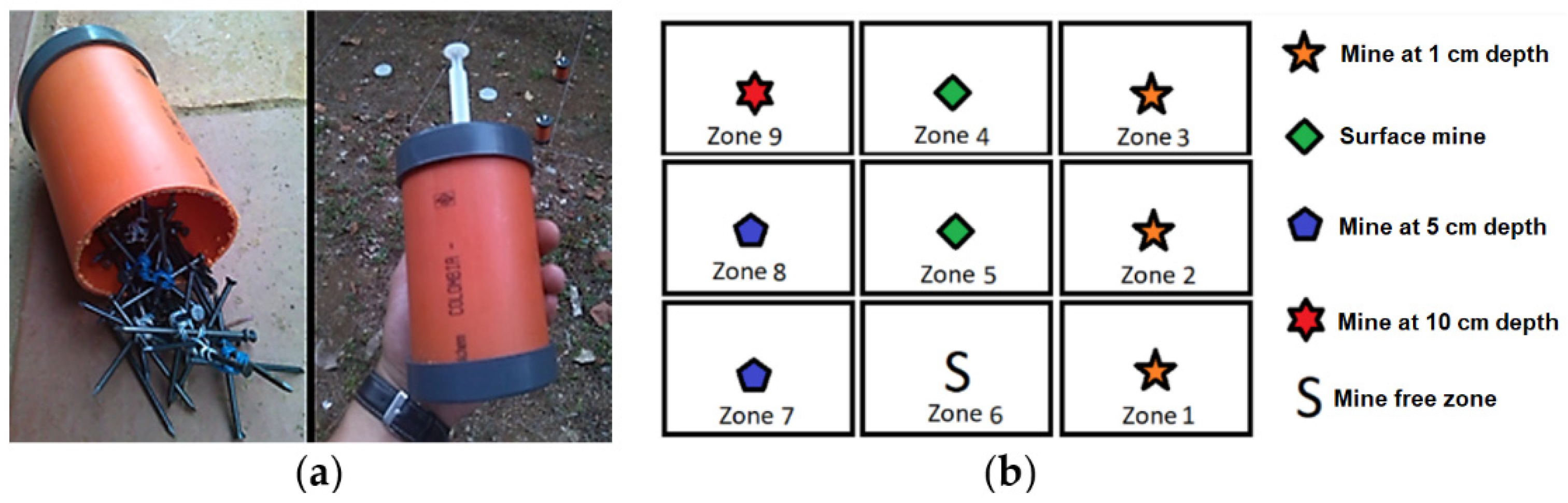
2.1. Experiment Design
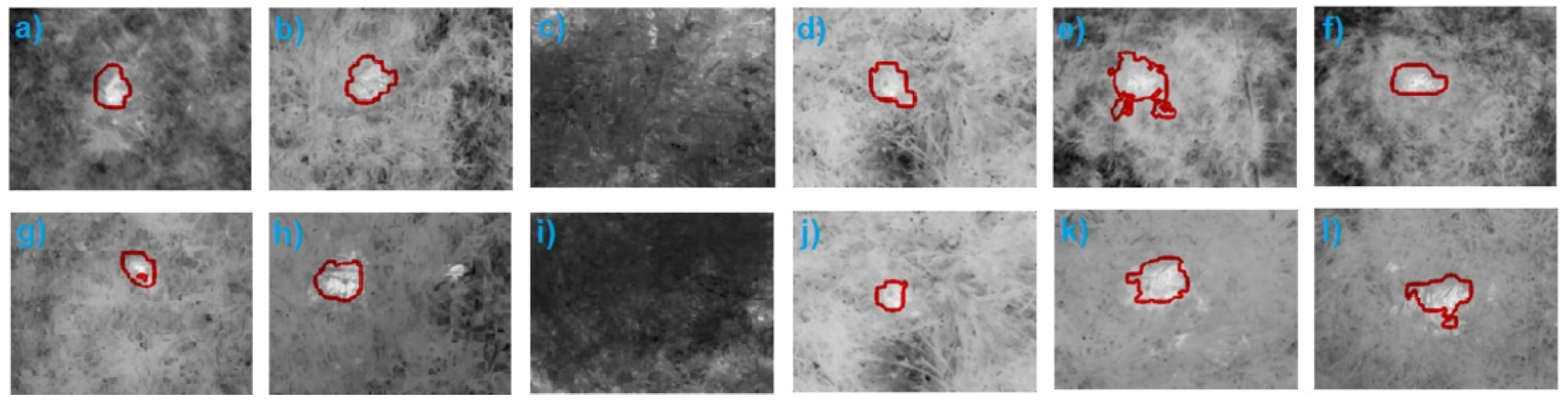
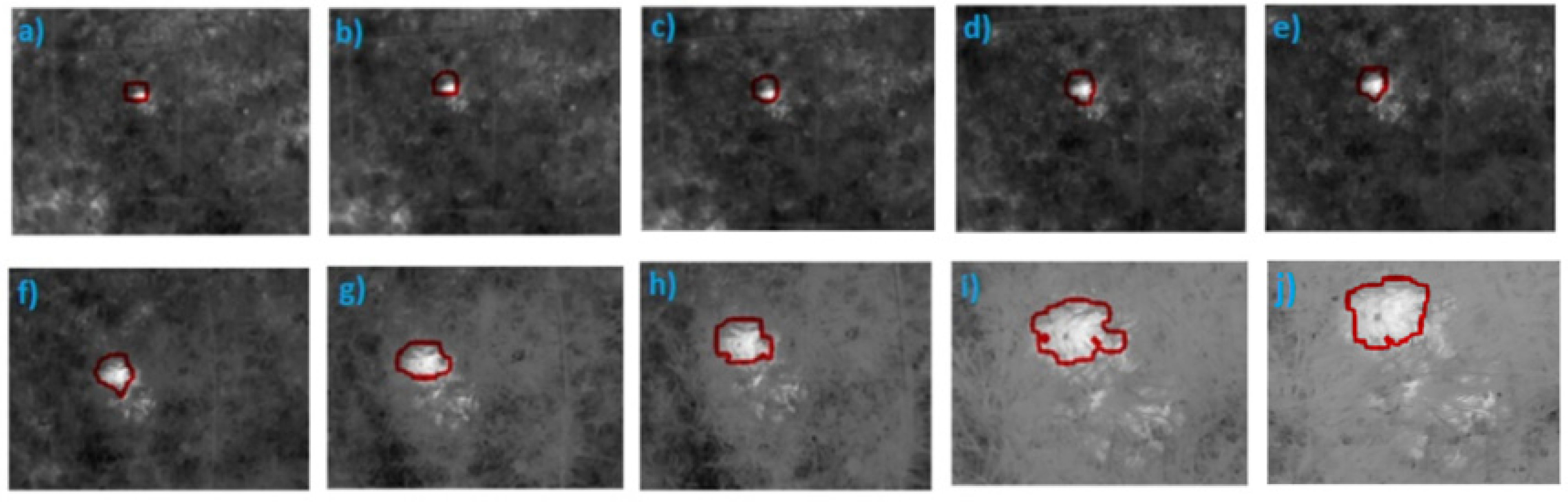
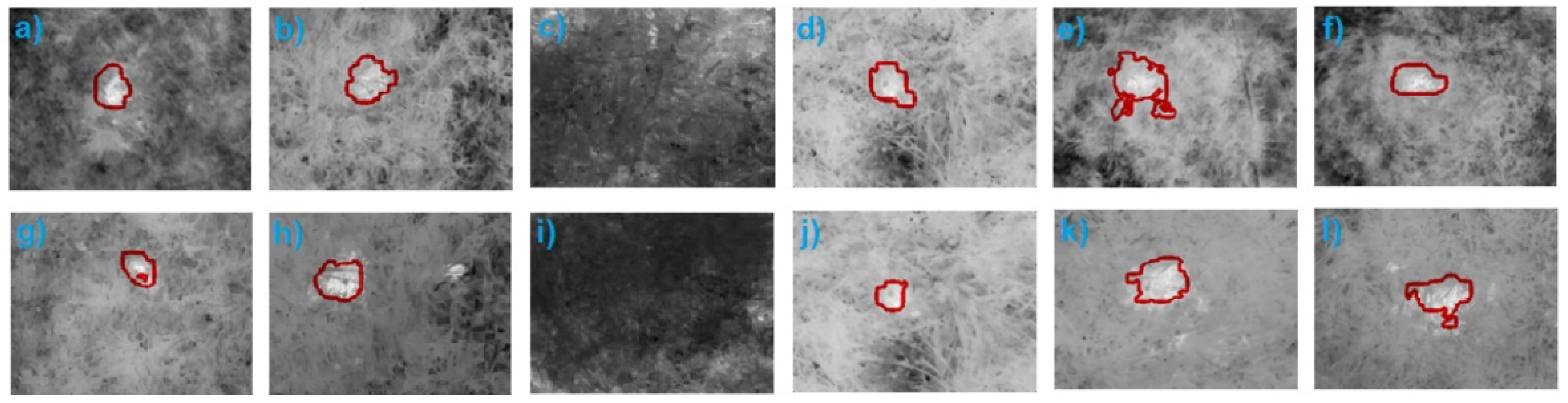
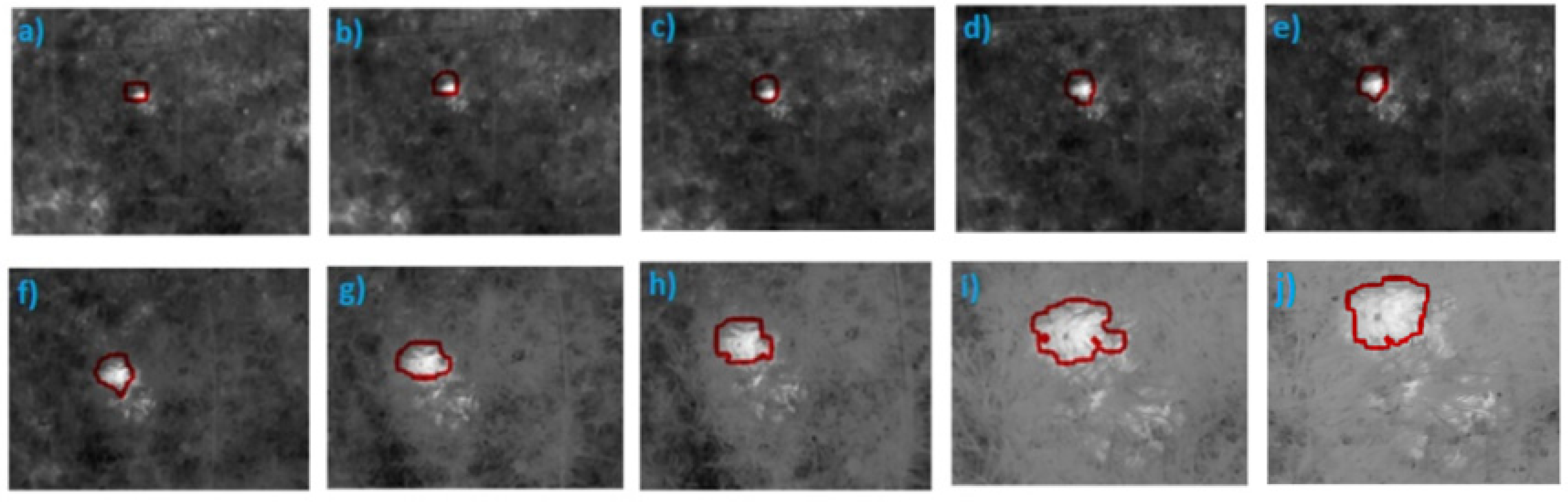
2.2. Image Acquisition
2.3. Image Preprocessing–Dataset Organization–Extraction and Selection of Features
2.4. Classification with Machine Learning
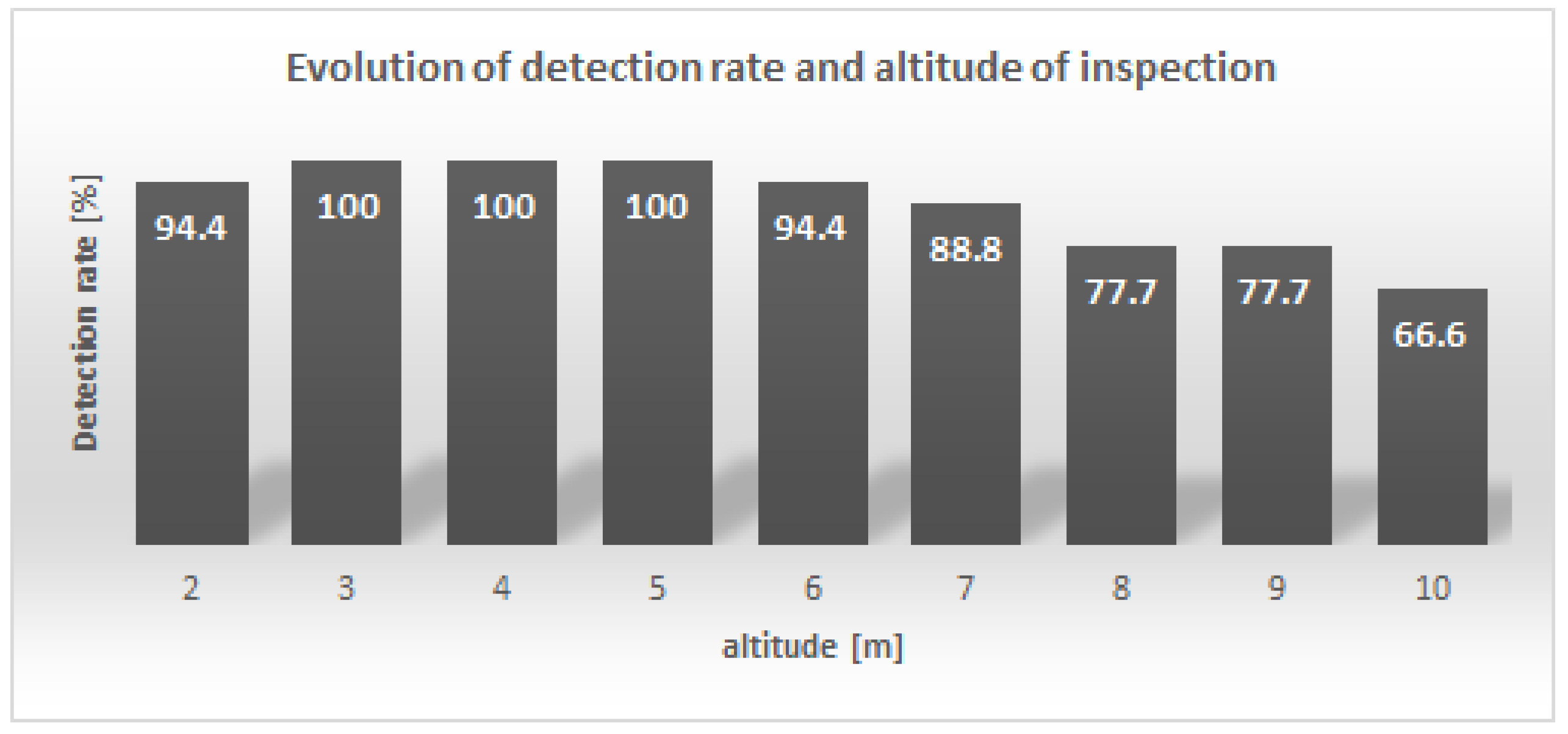
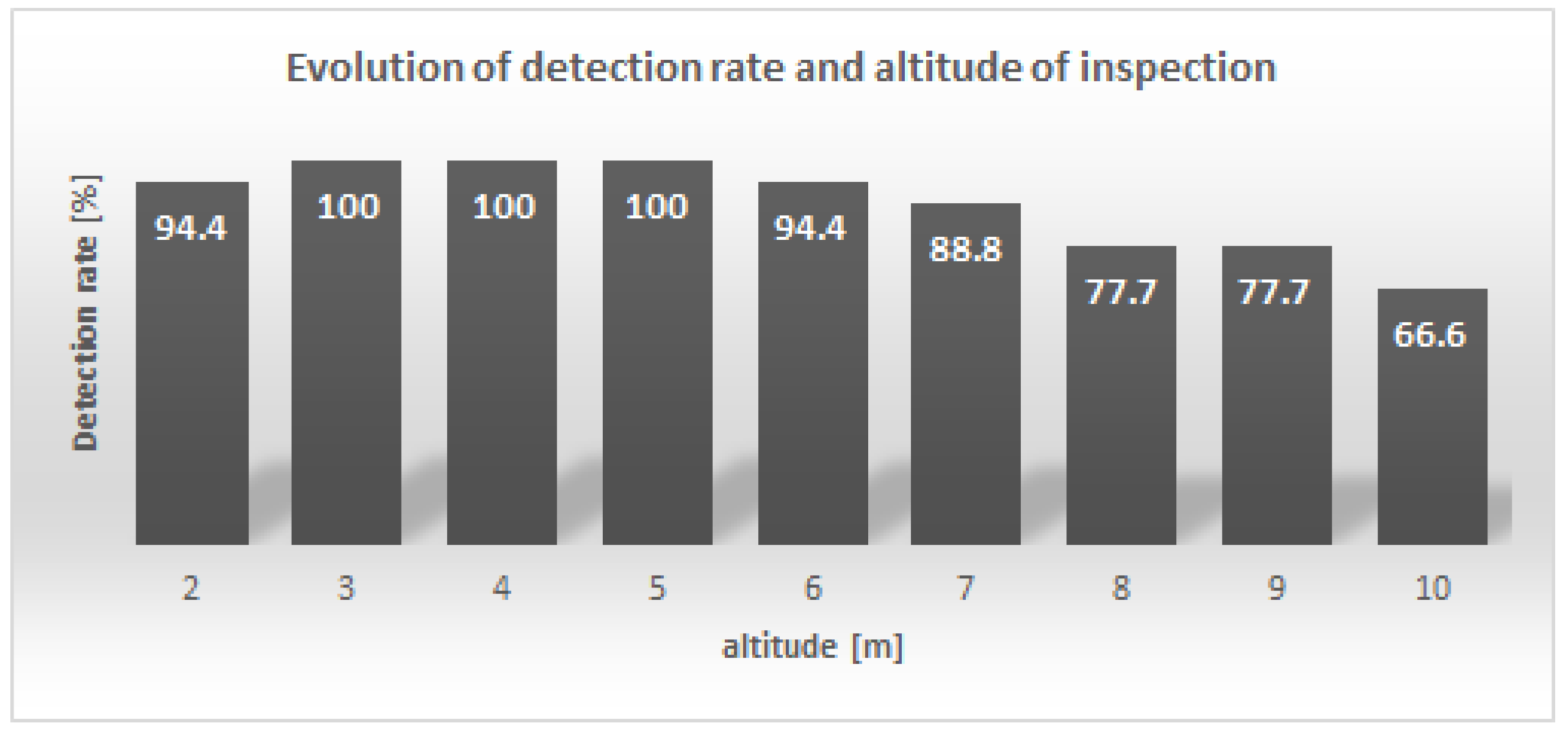
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- International Campaign to Ban Landmines. Available online: http://www.icbl.org/en-gb/home.aspx (accessed on 13 August 2021).
- Zubair, M.; Choudhry, M.A. Land mine detecting robot capable of path planning. WSEAS Trans. Syst. Control 2011, 6, 105–114. [Google Scholar]
- Casas-Díaz, C.A.; Roa-Guerrero, E.E. Development of mobile robotics platform for identification of land mines antipersonal in different areas of Colombia. In Proceedings of the 2015 IEEE Colombian Conference on Communication and Computing, Popayan, Colombia, 13–15 May 2015; pp. 1–6. [Google Scholar]
- Tivive, F.H.C.; Bouzerdoum, A.; Abeynayake, C. GPR Target Detection by Joint Sparse and Low-Rank Matrix Decomposition. IEEE Trans. Geosci. Remote. Sens. 2019, 57, 2583–2595. [Google Scholar] [CrossRef] [Green Version]
- Malof, J.M.; Reichman, D.; Karem, A.; Frigui, H.; Ho, K.C.; Wilson, J.N.; Lee, W.-H.; Cummings, W.J.; Collins, L.M. A Large-Scale Multi-Institutional Evaluation of Advanced Discrimination Algorithms for Buried Threat Detection in Ground Penetrating Radar. IEEE Trans. Geosci. Remote. Sens. 2019, 57, 6929–6945. [Google Scholar] [CrossRef]
- Garcia-Fernandez, M.; Alvarez-Lopez, Y.; Gonzalez-Valdes, B.; Rodriguez-Vaqueiro, Y.; Arboleya-Arboleya, A.; Las Heras, F. Recent advances in high-resolution Ground Penetrating Radar on board an Unmanned Aerial Vehicle. In Proceedings of the 13th European Conference Antennas Propagation, Krakow, Poland, 31 March–5 April 2019. [Google Scholar]
- Yoo, L.-S.; Lee, J.-H.; Lee, Y.-K.; Jung, S.-K.; Choi, Y. Application of a Drone Magnetometer System to Military Mine Detection in the Demilitarized Zone. Sensors 2021, 21, 3175. [Google Scholar] [CrossRef] [PubMed]
- Kaya, S.; Leloğlu, U.M. Buried and Surface Mine Detection from Thermal Image Time Series. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2017, 10, 4544–4552. [Google Scholar] [CrossRef]
- Ghazali, K.H.; Jadin, M.S. Detection improvised explosive device (IED) emplacement using infrared image. In Proceedings of the 2014 UKSim-AMSS 16th International Conference on Computer Modelling and Simulation, Cambridge, UK, 26–28 March 2014; pp. 307–310. [Google Scholar] [CrossRef]
- Szymanik, B.; Gratkowski, S. Numerical and experimental validation of optimization results in microwave enhanced infrared landmines’ detection. IEEE Trans. Magn. 2015, 51, 18–21. [Google Scholar] [CrossRef]
- García, B.; Restrepo, A.D.; Loaiza, H. Detection of external structures of anti-personnel mines by means of thermographic inspection of soil. In Proceedings of the 14th International Workshop on Advanced Infrared Technology and Applications (AITA) 2017, Quebec City, QC, Canada, 27–29 September 2017. [Google Scholar]
- Ardila, C.; Gámez, E.; Tirado, P. Los artefactos explosivos improvisados -AEI-: Una amenaza para el estado colombiano. In Desafíos para la seguridad y defensa nacional de Colombia: Teoría y praxis, 1st ed.; Cubides, J., Jiménez, J., Eds.; Escuela Superior de Guerra: Bogota, Colombia, 2017; pp. 255–309. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ambient Temperature | Solar Radiation | Relative Humidity | Wind Speed |
|---|---|---|---|
| 25.9 °C | 119.9 W/m2 | 69.8% | 1.9 m/s |
| ±1.2 °C | ±5.6 W/m2 | ±7.7% | ±0.7 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Forero-Ramírez, J.C.; García, B.; Tenorio-Tamayo, H.A.; Restrepo-Girón, A.D.; Loaiza-Correa, H.; Nope-Rodríguez, S.E.; Barandica-López, A.; Buitrago-Molina, J.T. Detection of “Legbreaker” Antipersonnel Landmines by Analysis of Aerial Thermographic Images of the Soil. Eng. Proc. 2021, 8, 25. https://doi.org/10.3390/engproc2021008025
Forero-Ramírez JC, García B, Tenorio-Tamayo HA, Restrepo-Girón AD, Loaiza-Correa H, Nope-Rodríguez SE, Barandica-López A, Buitrago-Molina JT. Detection of “Legbreaker” Antipersonnel Landmines by Analysis of Aerial Thermographic Images of the Soil. Engineering Proceedings. 2021; 8(1):25. https://doi.org/10.3390/engproc2021008025
Chicago/Turabian StyleForero-Ramírez, Juan C., Bryan García, Hermes A. Tenorio-Tamayo, Andrés D. Restrepo-Girón, Humberto Loaiza-Correa, Sandra E. Nope-Rodríguez, Asfur Barandica-López, and José T. Buitrago-Molina. 2021. "Detection of “Legbreaker” Antipersonnel Landmines by Analysis of Aerial Thermographic Images of the Soil" Engineering Proceedings 8, no. 1: 25. https://doi.org/10.3390/engproc2021008025
APA StyleForero-Ramírez, J. C., García, B., Tenorio-Tamayo, H. A., Restrepo-Girón, A. D., Loaiza-Correa, H., Nope-Rodríguez, S. E., Barandica-López, A., & Buitrago-Molina, J. T. (2021). Detection of “Legbreaker” Antipersonnel Landmines by Analysis of Aerial Thermographic Images of the Soil. Engineering Proceedings, 8(1), 25. https://doi.org/10.3390/engproc2021008025