Abstract
The Galileo High-Accuracy Service (HAS) was declared operational (initial service) in January 2023 after an intense testing phase aimed at assessing its service performance through the transmission of live HAS corrections. The HAS performance at high latitudes is evaluated by analyzing data collected at the Polish Polar Station located in Hornsund, in the Norwegian Svalbard archipelago. At such a location, the reception conditions can be affected by poor satellite geometries and ionospheric scintillation may degrade the signal quality. In this respect, data affected by scintillation events were identified and used for the performance analysis. The assessment is carried out by comparing the HAS corrections with the International GNSS Service (IGS) precise products. Moreover, the retrieved HAS corrections are used to assess the Precise Point Positioning (PPP) performance.
1. Introduction
The Galileo High-Accuracy Service (HAS) broadcasts Precise Point Positioning (PPP) corrections targeting the horizontal and vertical positioning accuracy, after convergence, below twenty and forty centimeters, respectively. In January 2023, the HAS initial service was declared operational after an intense testing phase aimed at assessing the service performance through the transmission of live corrections. During its testing phase and since the initial service declaration, HAS has attracted significant research interest given the potential offered by decimeter-level position accuracies.
In this respect, intensive tests have been conducted to assess the service’s performance. For instance, an analysis was conducted in [1] to assess the accuracy achievable with HAS: two static receivers placed in Brussels, Belgium, and in Tres Cantos, Spain, were considered. For both receivers, it was shown that the HAS accuracy targets can already be achieved with the current service level, where ionospheric corrections are not broadcast. Similar results were obtained by [2], which considered a set of 33 International GNSS Service (IGS) stations and used their data to assess the HAS performance. Also, in this case, horizontal accuracies within the 20 cm target were observed. Similarly, the vertical accuracy achieved was within the 40 cm target.
The focus of the mentioned analyses is either limited to central Europe or aggregated at the level of several reference stations. In this work, we assess the HAS performance at high latitudes by exploiting data collected by the Polish Polar Station located in Hornsund, in the Norwegian Svalbard archipelago at a latitude around 77°. The station features a multi-constellation Septentrio PolaRx5S receiver connected to a choke-ring antenna. The binary files provided by the receiver are processed using an in-house developed decoder, denoted as Galileo HAS Parser (GHASP) [3,4], which is able to retrieve HAS corrections from the Galileo E6-B signal pages collected by the Septentrio PolaRx5S receiver. The corrections were then applied to the broadcast orbits and clocks to obtain precise satellite positions and clock offsets. Finally, the obtained precise orbits and clocks, and the decoded biases, were input to the Oregon State University Precise Point Positioning (ORPPP) software v 1.0, which was used to estimate the final position solution.
The assessment of the HAS performance at high latitudes is of particular interest because reception conditions can be affected by poor satellite geometries [5]. Moreover, at high latitudes, ionospheric scintillation may occur, degrading the signal quality.
Ionospheric scintillations are fast and random fluctuations in the signal amplitude and/or phase produced by strong ionospheric electron gradients [6]. This phenomenon is more frequent and severe at high latitudes and in equatorial areas [7].
However, since the ionospheric morphology is different in these two regions, the phenomenon presents different characteristics in these geographical areas. Specifically, in the equatorial regions, scintillation usually is characterized by correlated amplitude and phase signal variations, while at high latitudes, scintillation is mainly characterized by strong phase fluctuations and lower amplitude variations. Strong phase signal variations induced by scintillation can be particularly challenging for carrier-phase-based position techniques, such as PPP algorithms, which are exploited by the typical HAS users. In order to assess the impact of ionospheric scintillation on the HAS performance, data collected during a day affected by strong phase scintillation are considered. The HAS performance assessment is carried out by (1) comparing the quality of the HAS-corrected orbits and clocks with the precise products provided by the IGS (https://igs.org/products/ accessed on 31 January 2023), and (2) analyzing the HAS PPP solution in the position domain.
The remainder of this paper is organized as follows: Section 2 describes the methodology used to decode and apply the HAS corrections and obtain the final precise position. Section 3 illustrates the experimental set-up used to collect the data analyzed in this paper. Section 4 provides the assessment results through the statistics of the HAS orbit/clock and position errors. Finally, Section 5 draws some conclusions.
2. HAS Correction Decoding and Application
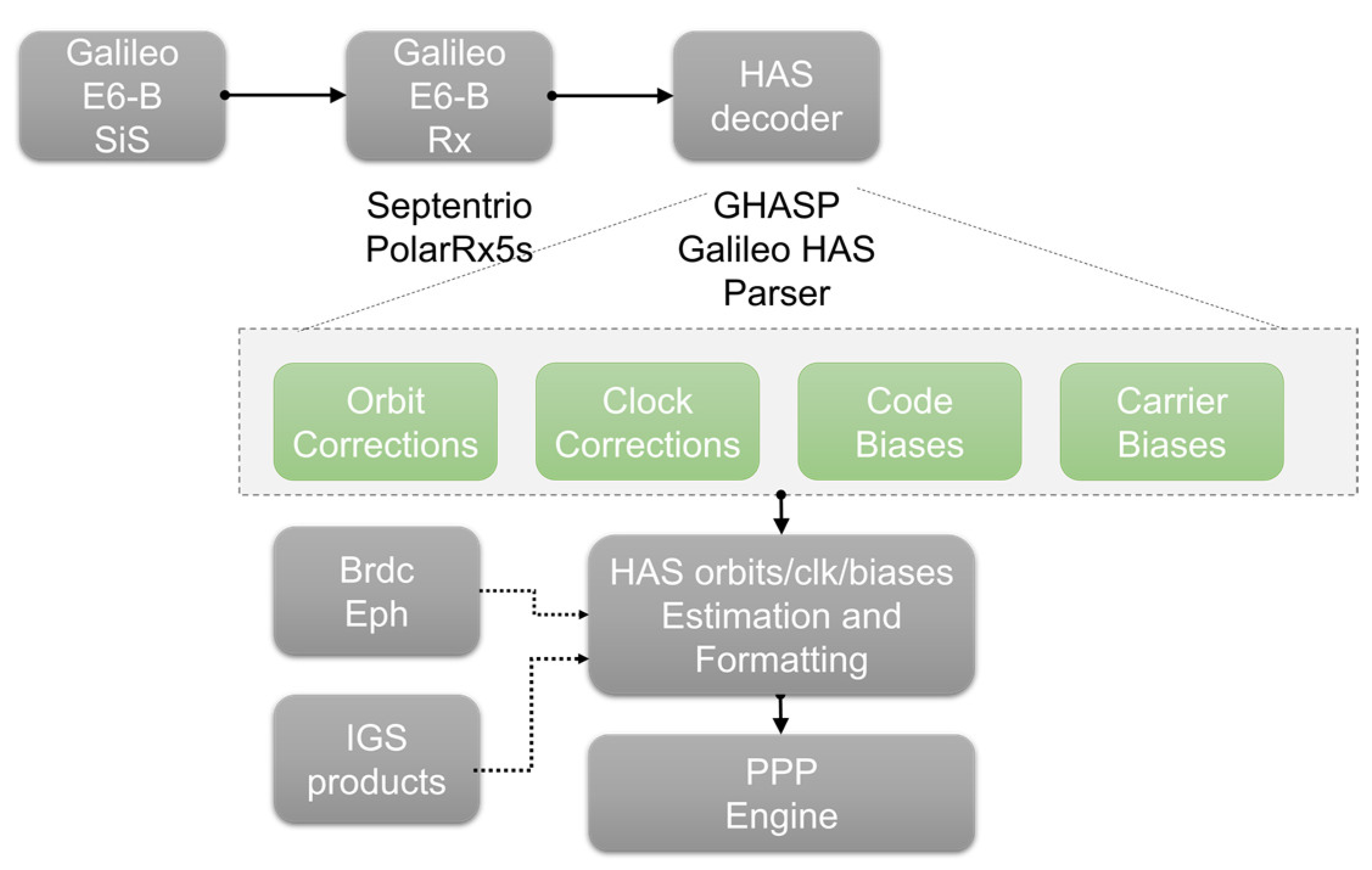
HAS corrections are broadcast through the Galileo E6-B Signal-in-Space (SiS) and disseminated using a high-parity encoding and dissemination scheme based on Reed–Solomon codes [8]. Several E6-B pages need to be combined in order to extract the actual HAS corrections. This operation is performed using the GHASP software v 1.0 [3,4] developed by the authors. GHASP supports several input formats and is able to convert messages collected using E6-B capable receivers into actual corrections. The data extracted using the GHASP software includes orbit and clock corrections and code and carrier biases. In the following, the quality of the orbit and clock corrections is analyzed by comparing them with the precise products obtained from the IGS. This process is schematically represented in Figure 1, which shows the different processing steps adopted for the analysis. HAS corrections were applied to the broadcast orbits and clocks to obtain precise satellite orbits and clocks. The latter were then formatted as standard Special Product 3 (.sp3) orbit and clock (.clk) files [9,10] using an in-house developed software so that they could be easily processed. The extracted HAS corrections in the standard orbit and clock file formats were tested using a PPP algorithm.
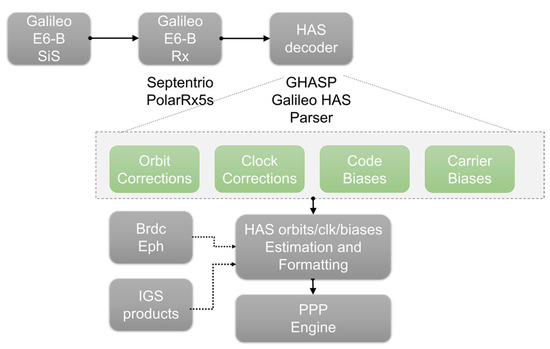
Figure 1.
Representation of the process adopted for decoding and applying HAS corrections.
For this experiment, the authors used the ORPPP software, developed by the coauthors of this paper at the Oregon State University. The ORPPP software is capable of processing multi-constellation, multi-frequency GNSS signals.
The primary observables used by the ORPPP software are ionosphere-free linear combinations, and the unknown parameters include the position vector, clock error, zenith wet delay, float ambiguity parameter, differential code biases, and intersystem bias. Tidal corrections (solid earth, ocean, pole tides), phase wind-up, and relativistic corrections are applied. The unknown parameters are estimated using an adaptive robust Kalman filtering method introduced by [11].
3. Experimental Set-Up
The data under analysis were collected by the WUTH reference station located in the Polish Polar Station of Hornsund in Spitsbergen/Norway ( and included in the IGS and the EUREF Permanent GNSS Network (EPN). Currently, this station is the second northernmost location of the IGS network. The station is equipped with a POLARX5S receiver connected to a SEPCHOKE_B3E6–SPKE choke-ring antenna from Septentrio, Leuven, Belgium. A view of the antenna used for the data collection is provided in Figure 2. The receiver is an Ionospheric Monitoring Scintillation Receiver (ISMR) embedded with an ultra-low phase noise oscillator, which allows the identification of the phase fluctuations due to ionospheric scintillation minimizing the clock noise contribution. The ISMR provides scintillation indices, such as S4 and Phi60, which are used to identify the level of amplitude and phase scintillation [12]. Moreover, the receiver was set to record the E6-B navigation message, which was exploited to retrieve the HAS corrections as described in Section 2.
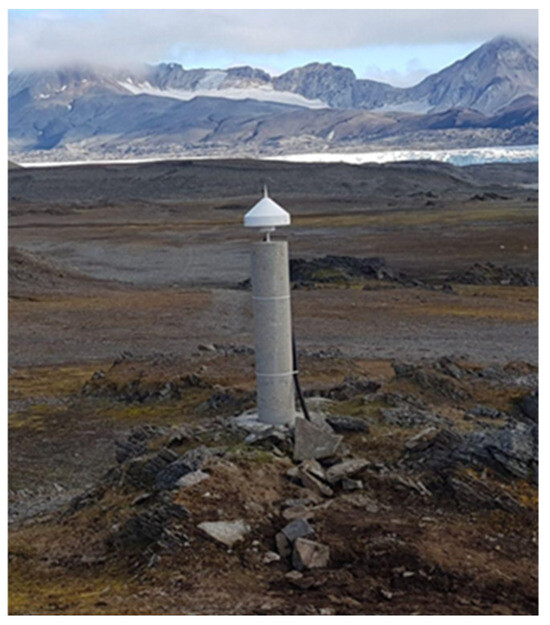
Figure 2.
View of the antenna of the WUTH Polish Polar Station in Hornsund (Svalbard, Norway).
4. HAS Assessment Results
While several days of data were considered, the assessment presented in this paper focuses on the data collected from the WUTH station on the 4th of September 2022 (DOY 247). In particular, the interval between 15:00 and 19:00 was analyzed, since it was characterized by very intense ionospheric activity.
Moving at high latitudes, the maximum reachable satellite elevation decreases and therefore the satellite visibility is reduced. Consequently, the occurrence of low-elevation satellites and intense ionospheric activity can render the high-latitude region a very challenging environment for high-accuracy applications.
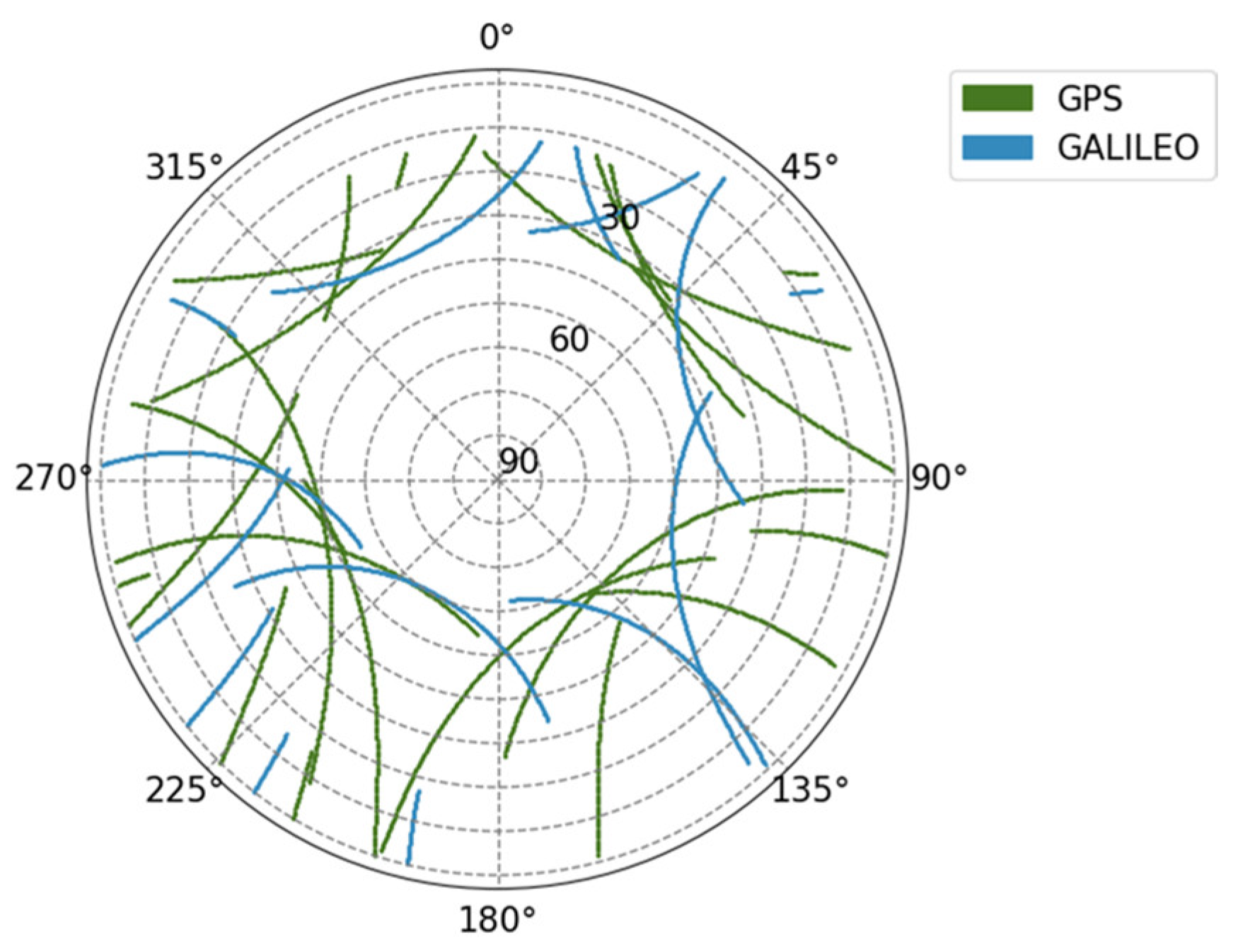
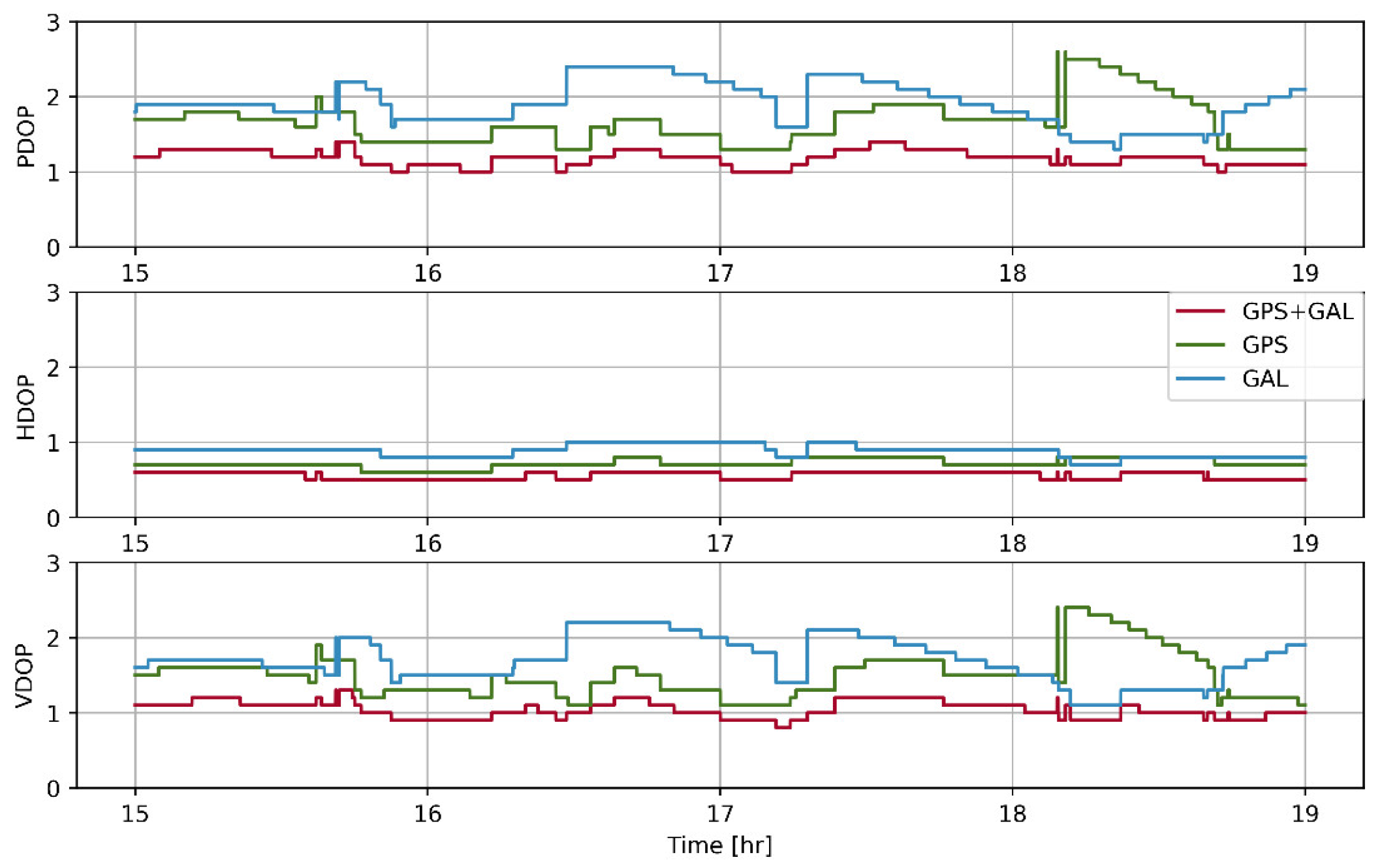
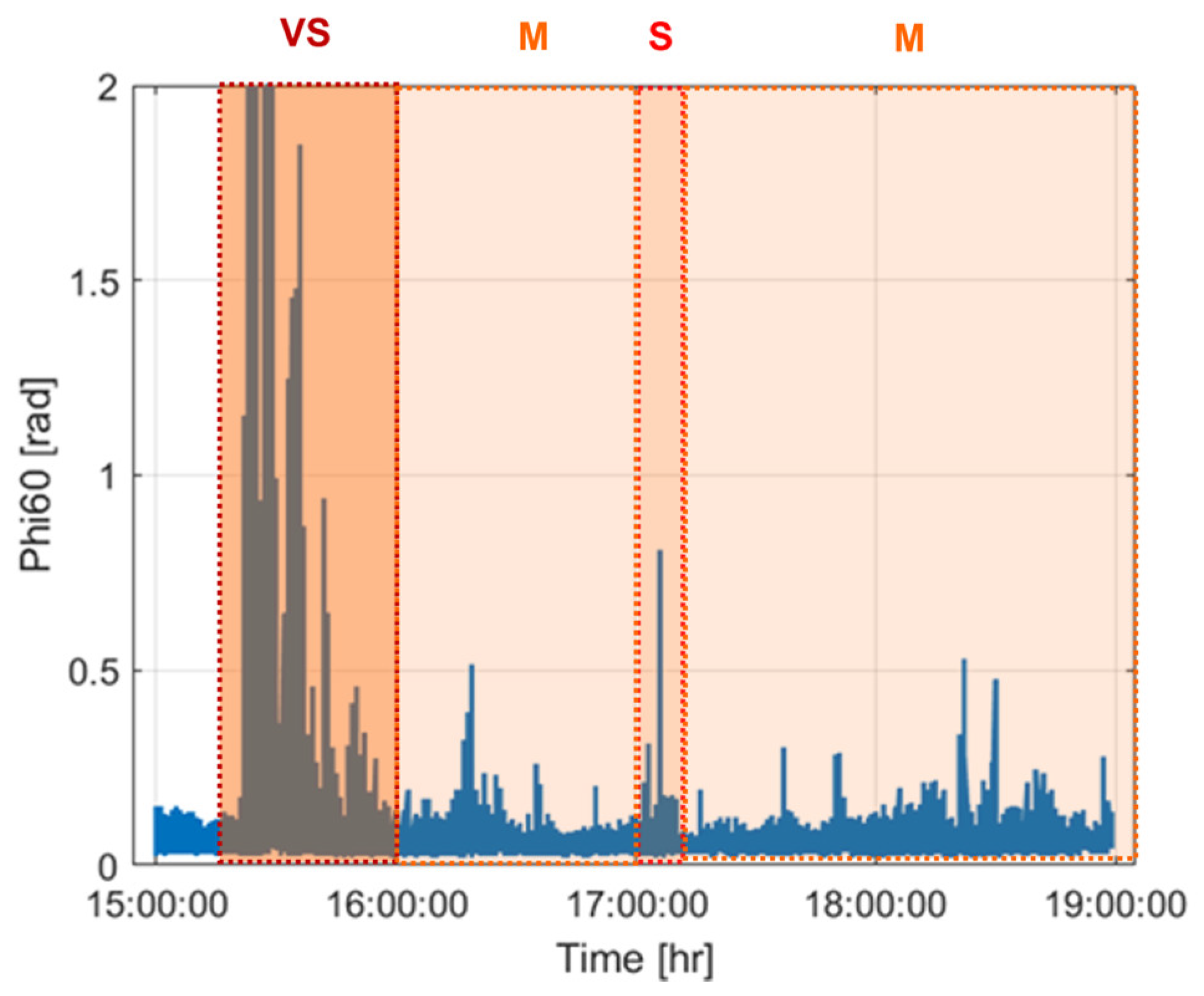
During the observation period, the maximum satellite elevation was around 60 degrees for both the GPS and Galileo satellites, as shown in the skyplot provided in Figure 3. Despite this fact, a good satellite geometry can be observed in Figure 4, where the Position Dilution of Precision (PDOP), the Horizontal (HDOP) and Vertical (VDOP) are reported. The DOPs are always below 2.5 for the GPS only, Galileo only and GPS + Galileo cases. This result indicates good geometry conditions for the selected receiver location. In Figure 5, the phase scintillation index provided by the ISMR during the time interval considered for the analysis is also reported for all satellites in view. The Phi60 is an index used to quantify the level of phase scintillation and is obtained by computing the standard deviation of the detrended carrier phase, averaged over one minute of data [12]. The detrending operation is performed to eliminate the low-frequency variations in the phase measurements due to other noise sources, such as the receiver clock, multipath and the relative satellite user motion. In this way, only high-frequency components caused by ionospheric scintillation are retained.
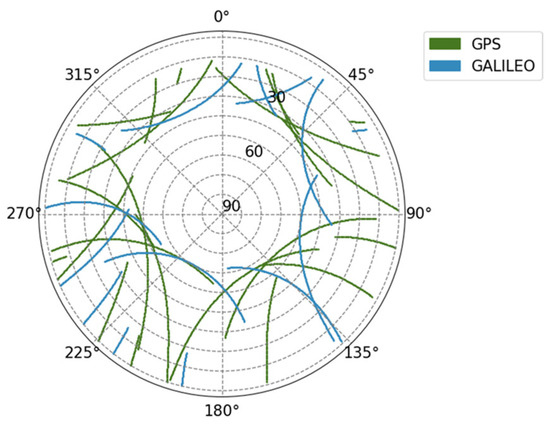
Figure 3.
Skyplot with the track of the satellites in view over the WUTH station during the testing period.
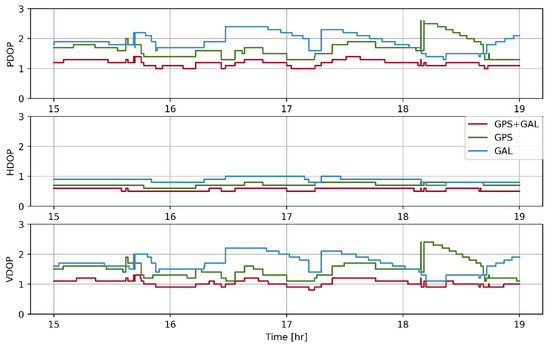
Figure 4.
PDOP; HDOP and VDOP observed during the testing period.
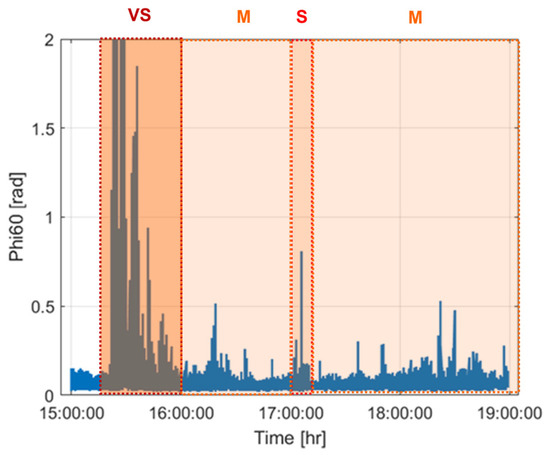
Figure 5.
Phi60 index recorded at the WUTH station during the testing period and for all satellites.
Slightly different Phi60 thresholds are used in the literature to classify different scintillation levels. Adapting the values in [13,14], we classify the phase scintillation level as follows: values of Phi60 above 0.25 and below 0.4 radians indicate the occurrence of weak scintillation, values between 0.4 and 0.6 correspond to moderate (M) phase scintillation, values between 0.6 and 0.8 radians are associated with strong (S) phase scintillation events, while values above 0.8 radians indicate very strong (VS) scintillation. The different levels of phase scintillation are indicated on top of Figure 5.
Around 15:20, very intense ionosphere activity occurs, leading to the occurrence of very strong phase scintillation. Then, the activity decreases, but still some moderate/strong ionospheric activity is present, with Phi60 achieving values above 0.5 radians.
4.1. Orbit and Clock Errors
The quality of the HAS orbits and clocks was assessed using the Center for Orbit Determination in Europe (CODE) final products as reference. Details of the accuracy of these final products can be found in [15]. Given that the CODE satellite orbits are referred to the Centre of Mass (COM) while the HAS satellite orbits are referred to the Antenna Phase Centre (APC), satellite Phase Centre Offsets (PCOs) were applied to align the two products and allow a comparison. The PCOs were retrieved from the igs14.atx antenna model [16].
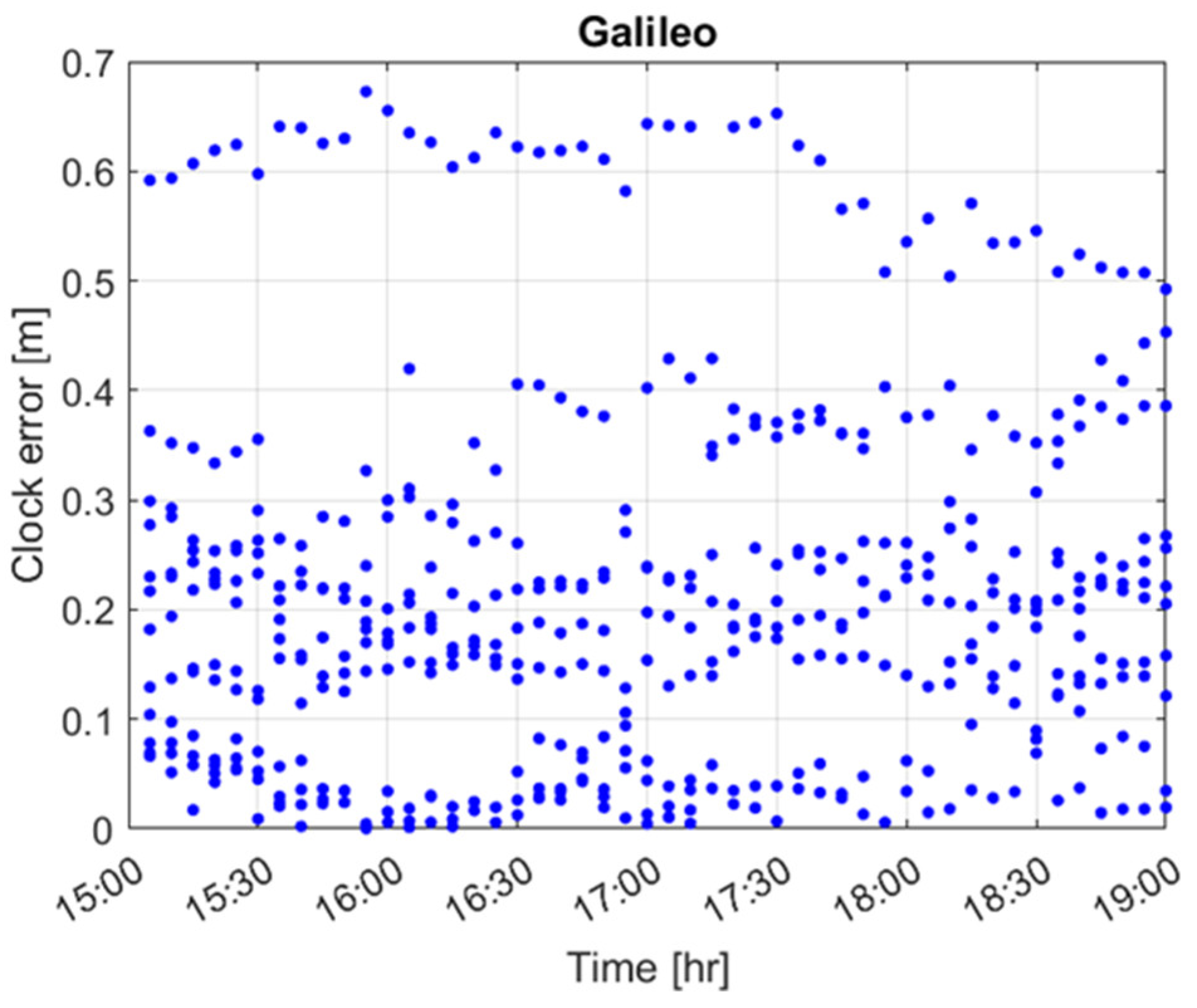
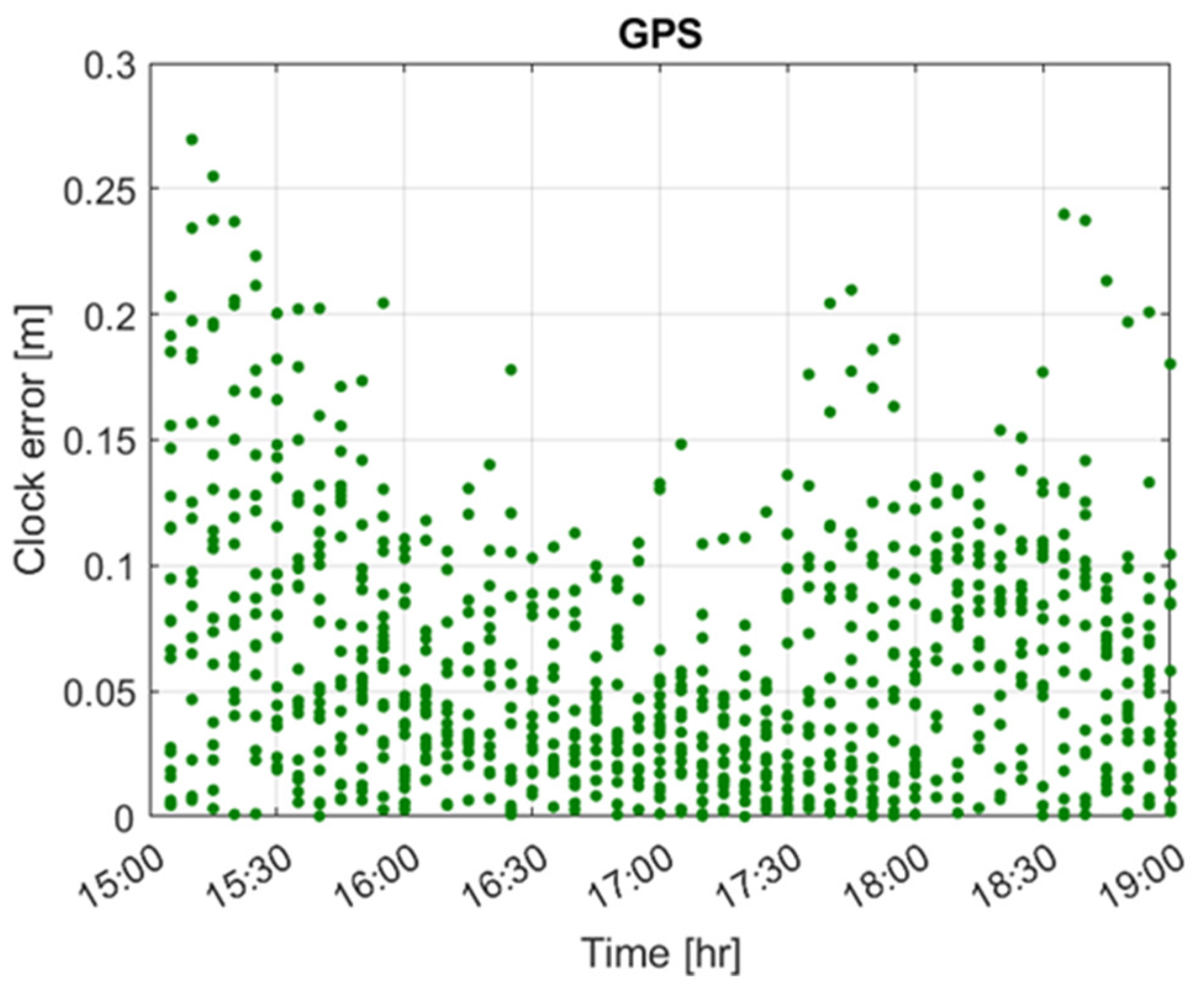
Moreover, the HAS clock corrections are referred to the Ionosphere Free (IF) combination of L1C/A/L2P measurements for GPS and E1/E5b for Galileo, while CODE clocks are referred to the IF combinations L1P/L2P and E1/E5a. Therefore, IGS satellite biases were used to align the two products to the same reference IF measurement combination and enable a fair comparison. After the alignment, the clock accuracy was evaluated by computing the difference between the two products and removing the mean error per constellation at each instant.
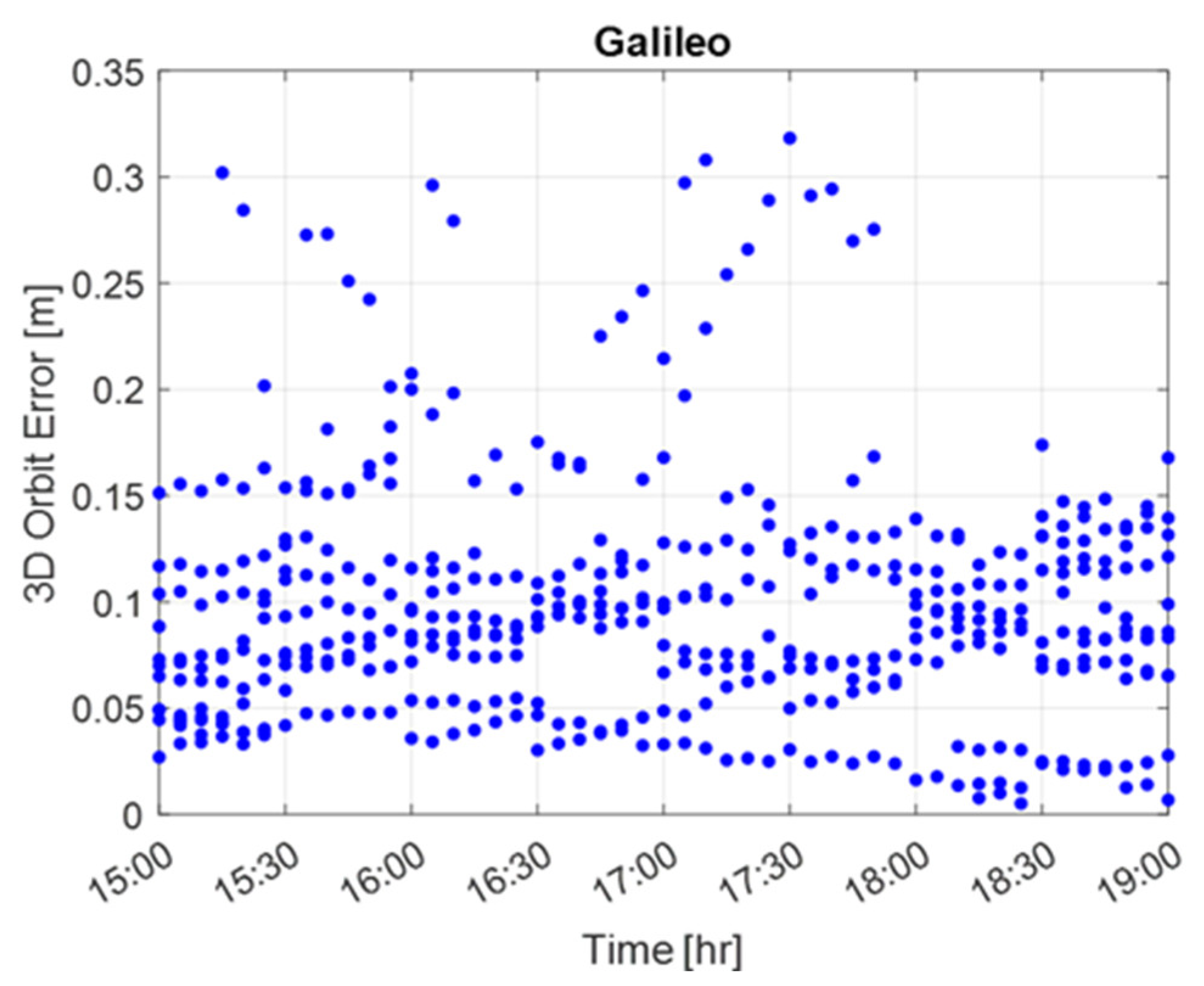
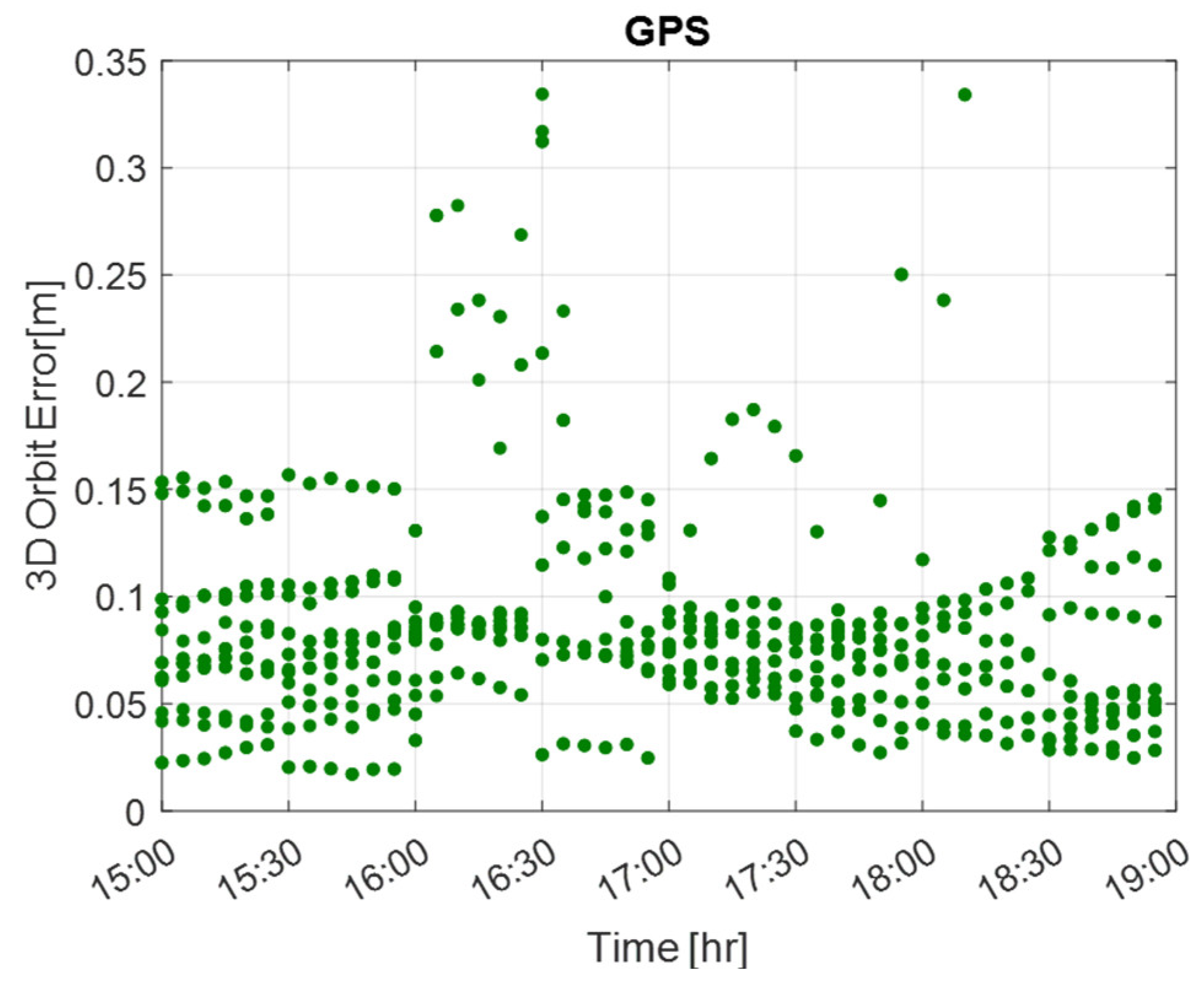
The Galileo and GPS 3D orbit errors are shown in Figure 6 and Figure 7, respectively. The errors for all visible satellites are provided jointly in the figures. After computing the root mean squared (rms) 3D orbit error at each instant for all satellites, the 95th percentile values were computed and are reported in Table 1 for the Galileo and GPS cases. Specifically, the values are 10.5 and 11 cm for the Galileo and GPS constellations, respectively. These values are comparable with the ones found in [2] for the data collected on the same day but at a different geographical location. The clock errors are reported in Figure 8 and Figure 9 for the Galileo and GPS constellations, respectively. In Table 1, the 95th percentile of the rms clock errors, computed for all satellites at each instant, are also reported. For the GPS case, this value was computed after removing satellite G02, which showed bigger error values, also in agreement with the findings in [2]. Moreover, in Figure 8, it can be observed that a higher clock error was estimated for one Galileo satellite, with values around 0.6 m. For this satellite (E12), similar error values were obtained in [2]. Note that the results were obtained during the HAS validation period, some months before the initial service operation. The HAS product accuracy at the moment is higher and is expected to gradually increase over time thanks to the algorithm tuning and the addition of stations.
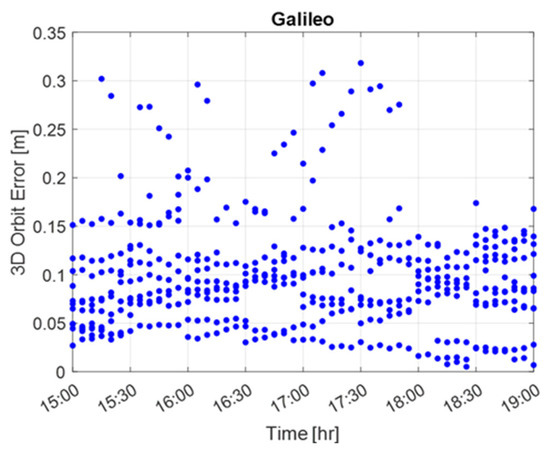
Figure 6.
The 3D orbit error for all the Galileo satellites visible during the testing period.
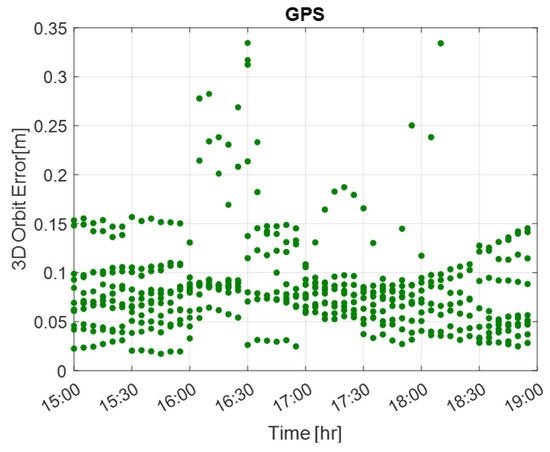
Figure 7.
The 3D orbit error for all GPS satellites visible during the testing period.

Table 1.
Orbit/Clock statistics (95th percentile).
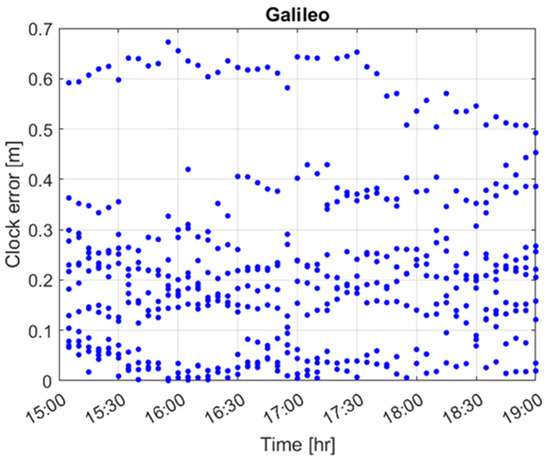
Figure 8.
Galileo clock error during the testing period.
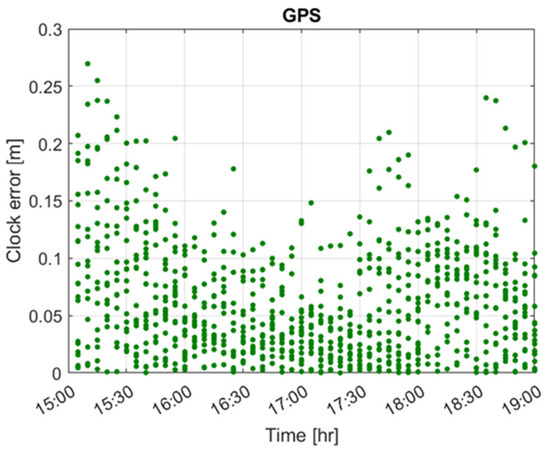
Figure 9.
GPS clock error during the testing period.
4.2. Position Domain Results
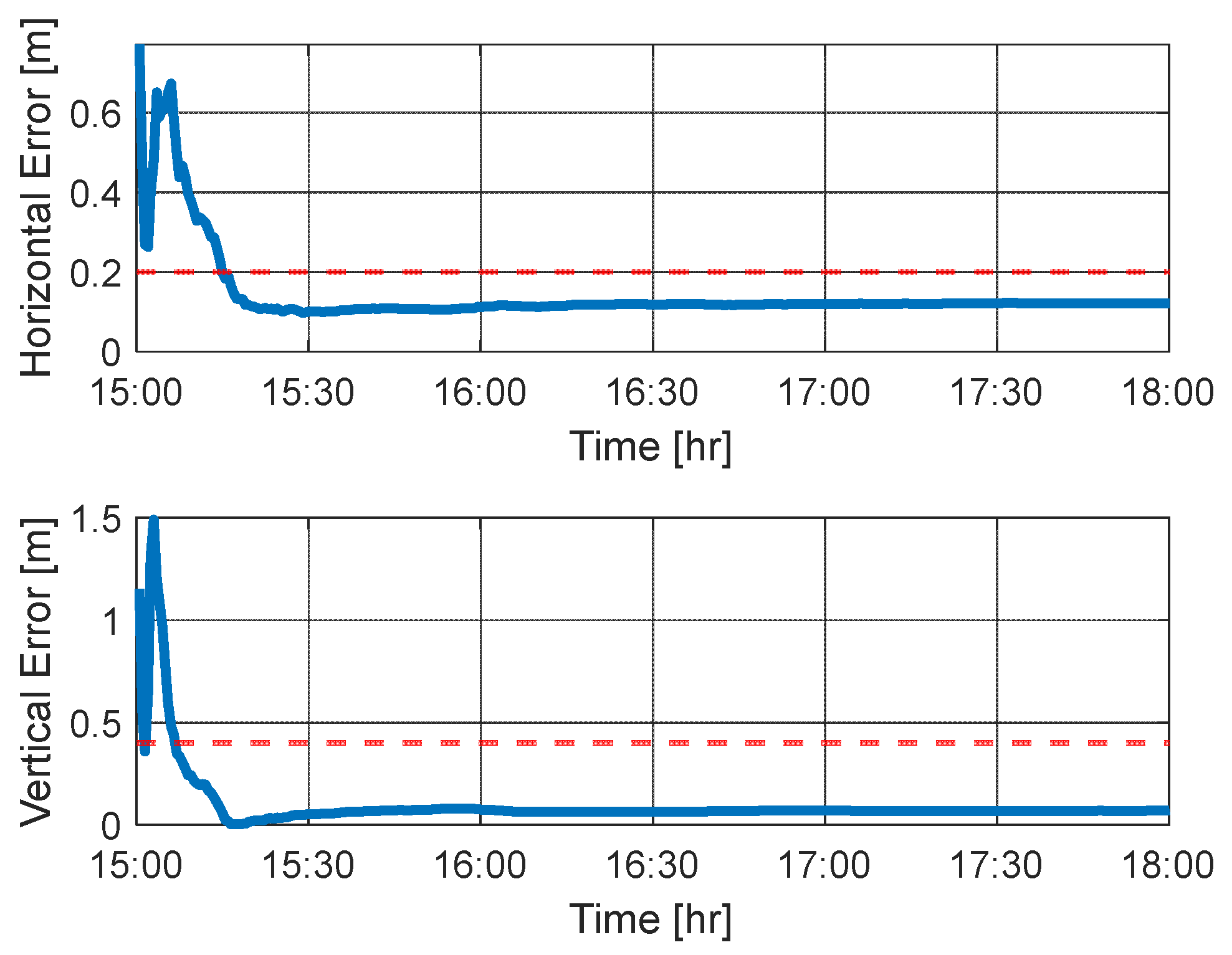
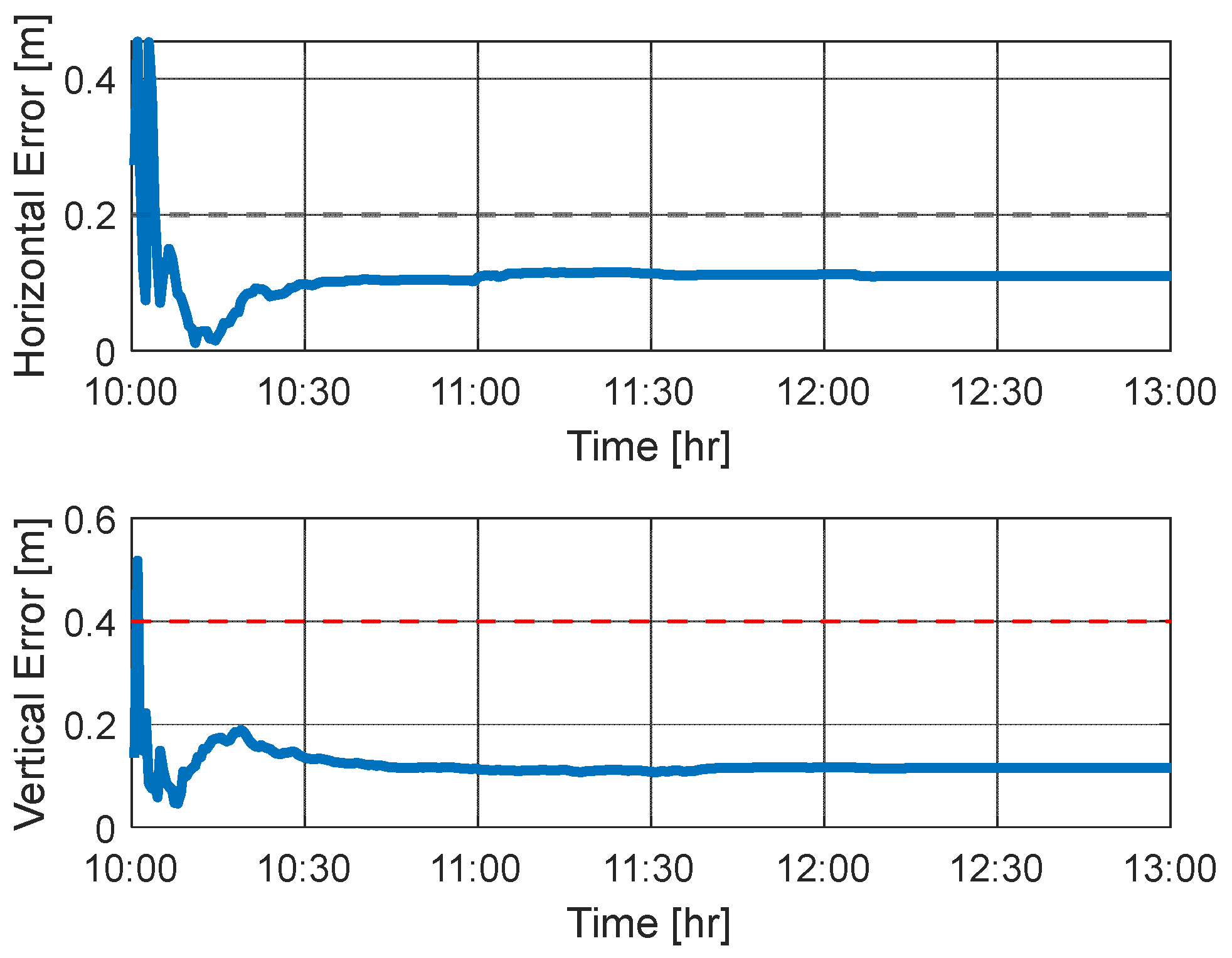
The PPP engine was set to process Galileo E1/E5b and GPS L1C/A/L2P measurements. The processing started just before the occurrence of the strong phase scintillation event identified by the peak in Phi60 reported in Figure 5 to stress the PPP performance. The horizontal and vertical position errors are provided in the upper and bottom parts of Figure 10. The PPP filter converges in 15 min, reaching a horizontal and vertical position accuracy below 20 and 40 cm, respectively. No phase biases were used for the PPP processing (they were not available at the time of data collection) and no ambiguity resolution was performed to assist in reducing the convergence time. After convergence, the horizontal and vertical accuracies were found to be below 20 and 40 cm, respectively. This can be observed in Table 2, where the statistics (95th percentile and std) of the horizontal and vertical errors (HE and VE) computed after convergence are reported and the target values are indicated with red dashed lines. The solution remains below the target thresholds even if the ionospheric activity persists until the end of the data collection, as shown in Figure 5. For comparison purposes, in Figure 11, the HE and VE are reported for a period of quiet ionospheric conditions recorded during the same day. The associated statistics are also reported in Table 2. In this case, the convergence is reached after 230 s. However, after convergence, the positioning accuracy is comparable for the two cases.
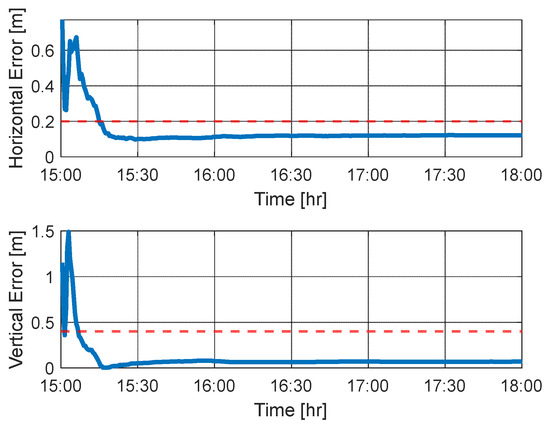
Figure 10.
Horizontal/vertical accuracy under ionospheric scintillation.
Table 2.
Positioning accuracy statistics after convergence and convergence time.
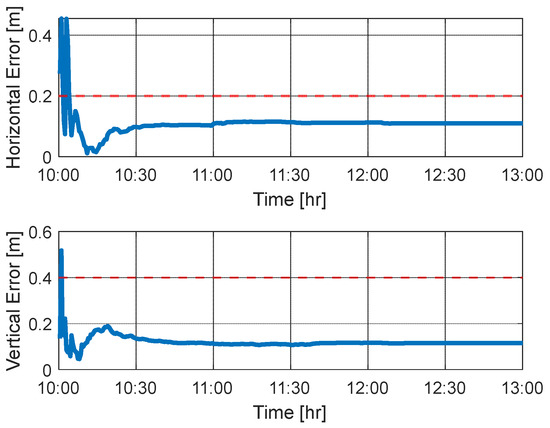
Figure 11.
Horizontal/vertical accuracy under quiet ionospheric conditions.
5. Conclusions
At the beginning of 2023, the Galileo HAS was declared operational, providing free corrections through the Galileo E6-B data component worldwide. In this paper, we showcased the potential of HAS to achieve a high accuracy at high latitudes and under ionospheric scintillation. For this purpose, we exploited the data collected at the Polish Polar station located in Hornsund (Svalbard, Norway) at a 77° latitude during a day with very intense ionospheric activity. Despite the harsh conditions, the HAS-based PPP solution achieved horizontal and vertical accuracies, after convergence, below 20 and 40 cm, respectively. The results were obtained by analyzing the data collected during the HAS testing phase. Improved performance should be expected with the enhancement of the corrections transmitted after the HAS declaration. As future work, it will be of interest to analyze more data sets collected at the same station and affected by different ionospheric scintillation conditions. The analysis will be extended to an assessment under equatorial scintillation, which is characterized by amplitude and phase scintillation.
Author Contributions
All authors contributed to the preparation of this paper. Conceptualization and methodology, M.S., D.B., A.A., J.P., K.W. and I.F.-H.; software, M.S., D.B., A.A. and J.P.; validation, M.S., D.B., A.A., J.P., K.W. and I.F.-H.; data curation, K.W. and M.S.; writing—original draft preparation, M.S. and D.B.; writing—review and editing, M.S., D.B., A.A., J.P., K.W. and I.F.-H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are available in this manuscript.
Acknowledgments
The data were provided by the Warsaw University of Technology EPN Analysis Center. The operation of the WUTH GNSS station is supported by: Polish National Science Center (NCN) Program Excellence Initiative: Research University (ID-UB).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Fernández-Hernández, I.; Chamorro-Moreno, A.; Cancela-Diaz, S.; Calle-Calle, J.D.; Zoccarato, P.; Blonski, D.; Senni, T.; Javier de Blas, F.; Hernández, C.; Simón, J.; et al. Galileo High Accuracy Service: Initial Definition and Performance. GPS Solut. 2022, 26, 65. [Google Scholar] [CrossRef]
- Naciri, N.; Yi, D.; Bisnath, S.; Javier de Blas, F.; Capua, R. Assessment of Galileo High Accuracy Service (HAS) test signals and preliminary positioning performance. GPS Solut. 2023, 27, 73. [Google Scholar] [CrossRef] [PubMed]
- Borio, D.; Susi, M.; Gioia, C. GHASP: A Galileo HAS Parser. GPS Solut. 2023, 27, 197. [Google Scholar] [CrossRef]
- Gioia, C.; Borio, D.; Susi, M.; Fernández-Hernández, I. The Galileo High Accuracy Service (HAS): Decoding and Processing Live Corrections for Code-Based Positioning. In Proceedings of the International Technical Meeting of The Institute of Navigation, Long Beach, CA, USA, 25–27 January 2022; pp. 1065–1074. [Google Scholar] [CrossRef]
- Susi, M.; Borio, D.; Gioia, C.; Brunes, M.T.; Dähnn, M.; Grinde, G.; Rost, C. Assessment of Galileo E6-B Data Demodulation Performance at High Latitudes: A Norwegian Vessel Case Study. Remote Sens. 2021, 13, 4669. [Google Scholar] [CrossRef]
- Rino, C.L. A Power Law Phase Screen Model for Ionospheric Scintillation: 1. Weak Scatter. Radio Sci. 1979, 14, 1135–1145. [Google Scholar] [CrossRef]
- Aarons, J. Global Morphology of Ionospheric Scintillations. Proc. IEEE 1982, 70, 360–378. [Google Scholar] [CrossRef]
- Fernández-Hernández, I.; Senni, T.; Borio, D.; Vecchione, G. High-parity vertical Reed-Solomon codes for long GNSS high-accuracy messages. Navigation 2020, 67, 365–378. [Google Scholar] [CrossRef]
- Hilla, S. The Extended Standard Product 3 Orbit Format (SP3-d). February 2016. Available online: https://epncb.eu/ftp/data/format/sp3d.pdf (accessed on 31 January 2023).
- Ray, J.; Coleman, M. RINEX Extensions to Handle Clock Information. Version 3.04 8 July. 2017. Available online: https://files.igs.org/pub/data/format/rinex_clock304.t (accessed on 31 January 2023).
- Guo, F.; Zhang, X. Adaptive robust Kalman filtering for precise point positioning. Meas. Sci. Technol. 2014, 25, 105011. [Google Scholar] [CrossRef]
- Van Dierendonck, A.J. Eye on the Ionosphere: Measuring Ionospheric Scintillation Effects from GPS Signals. GPS Solut. 1999, 2, 60–63. [Google Scholar] [CrossRef]
- Dubei, S.; Wahi, R.; Mingkhwan, E.; Gwal, A. Study of amplitude and phase scintillation at GPS frequency. Indian J. Radio Space Phys. 2005, 34, 402–407. [Google Scholar]
- Tiwari, R.; Skone, S.; Tiwari, S.; Strangeways, H.J. WBMod assisted PLL GPS software receiver for mitigating scintillation effects in high latitude region. In Proceedings of the 2011 XXXth URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011; pp. 1–4. [Google Scholar]
- Prange, L.; Villiger, A.; Sidorov, D.; Schaer, S.; Beutler, G.; Dach, R.; Jäggi, A. Overview of CODE’s MGEX solution with the focus on Galileo. Adv. Space Res. 2020, 66, 2786–2798. [Google Scholar] [CrossRef]
- Rebischung, P.; Schmid, R. IGS14/igs14.atx: A New Framework for the IGS Products. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 12–16 December 2016. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).