1. Introduction
As a result of the increasing demand for commercial applications for UASs (Unmanned Aerial Systems) and in order to harmonize the U-Space, technology development and EU investments on GNSS (Global Navigation Satellite System) receivers are now focusing on the requirements related to the specific category of UAS operations in terms of the security and safety of the navigation subsystems [
1].
To this purpose, the current European regulatory framework for specific category operations suggests assessing navigation precision and safety features through a SORA (Specific Operations Risk Assessment) methodology developed by JARUS (Joint Authorities for Rulemaking on Unmanned Systems) [
2]. This procedure quantifies the overall risk level (in the air and on the ground) that a certain operation holds for third parties through a parameter defined as SAIL (Specific Assurance and Integrity Level), which has an impact on the robustness at which safety requirements, namely OSOs (Operational Safety Objectives), need to be fulfilled to demonstrate that risk has been adequately mitigated and made acceptable. In this context, the definition of requirements for the development of the GNSS receiver lies in the identification of the applicable OSOs.
Considering the aforementioned situation, the DEGREE (DronEborne Galileo RecEivEr) project is focused on the development of an innovative GPS/Galileo dual-frequency GNSS receiver intended to take advantage of the EGNSS (European Global Navigation Satellite System), which allows the leverage of several differentiators in order to safely integrate UASs into non-segregated airspace and into the U-Space.
The technology developed during the DEGREE project guarantees a TRL (Technology Readiness Level) of seven within European Union standards introduced for the Horizon 2020 project [
3]. Therefore, a completed prototype is provided in addition to the corresponding integration and testing on a UAV (Unmanned Aerial Vehicle) in a relevant operational scenario within the specific category.
2. User and Industry Needs for UAV PNT Technology
It has been evidenced that the emergence of VLL (Very Low Level) operations is one of the main trends affecting the UAS community, and efforts shall be made towards the integration of such systems with other airspace users and as part of the U-Space concept. Particularly, primary areas of work focus on BVLOS (Beyond Line of Sight) and urban environment operations [
1], which are expected to emerge in the near future and bring strict requirements in terms of robust navigation, especially for autonomous operations and safe flight termination systems.
The introduction of unmanned technology that coexists with other users and manned aircraft creates a tight dependency on GNSSs as a source of PNT (Positioning, Navigation, and Timing) information. In this regard, when we analysed the market demands for a mid-grade, specific category GNSS receiver, it was found that accuracy and integrity are the most demanded features. As a summary,
Table 1 shows the main user and industry needs for a specific category GNSS receiver.
In recent years, the UASs market has experienced exponential growth with the appearance of new autonomous medium-sized systems between 10 Kg and 50 Kg [
3]. These systems allow for lifting heavier payloads with greater flight autonomies, thus increasing the number of functionalities and applications in different sectors. By using UASs, an outperforming of current operation performances in terms of time saving, safety considerations, cost efficiency, reliability, and repeatability is expected.
Some of the operational scenarios in which DEGREE will be deployed are:
3. Guidelines for Required Target Navigation Performance Level
One of the main goals of the DEGREE project is to standardize the implementation of specific category GNSS receivers. The guidelines for the implementation of EGNSS differentiators in UASs’ receivers and navigation solutions are drafted in order to achieve the defined performance levels as potential inputs to future standard to operations of Medium/High Risk (SAIL III and IV) in the specific category, based on the SORA (v.2.0) methodology [
5].
Operations in urban environments will likely require UASs to follow predefined routes in order to keep them separated from obstacles and away from high-risk areas. This requirement emerges as the outcome of a risk assessment and is defined in terms of RNP. For typical urban applications, RNP 0.01 (approximately 18 m) and/or RNP 0.005 (approximately 9 m) could be needed for the en-route flight phase and thus may become standard for small UAS navigation requirements.
The baseline approach for the guidelines definition for the required target navigation performance level is focused on the assessment of the level of RNP and the technologies and tools necessary to achieve it. The objective requirements, independent of the specific technology, which must be met to develop receivers with adequate performance, are indicated in the guidelines. These guidelines will then be shared in the meetings of the standardization bodies to ensure that they become the heart of the standards being developed.
The preliminary activity that is envisioned in order to complete the guidelines consists of an analysis of the general context in which the guidelines shall be developed, focusing on the applicable and ongoing regulations, relevant stakeholders, and the relationships among them. A key step is the identification of the gaps that need to be discussed to make explicit all assumptions that need to be made in order to provide such guidelines. Then, the SORA methodology is analysed in detail, focusing on the role of the Operational Safety Objectives and, in particular, on the OSO#13 “External services supporting UAS operations are adequate for the operation”, with the aim to fulfil the criteria of High Robustness (i.e., for both Integrity and Assurance) for the GNSS external service for High Risk Operations. However, the key step consists of drafting usable and practical specific guidelines for the UAS operators to comply with the robustness criteria of the OSO#13 for GNSSs based on the previous analysis.
Finally, the last step consists of providing the UAS operator with recommendations about mechanisms to detect potential GNSS service performance degradation, as well as potential actions to mitigate that degradation.
4. DEGREE Receiver Overview
The DEGREE receiver is based on an SDR platform, providing substantial amounts of flexibility to quickly adapt and upgrade the receiver functionalities to current and future developments and upcoming services, just by applying software upgrades and keeping the hardware unchanged.
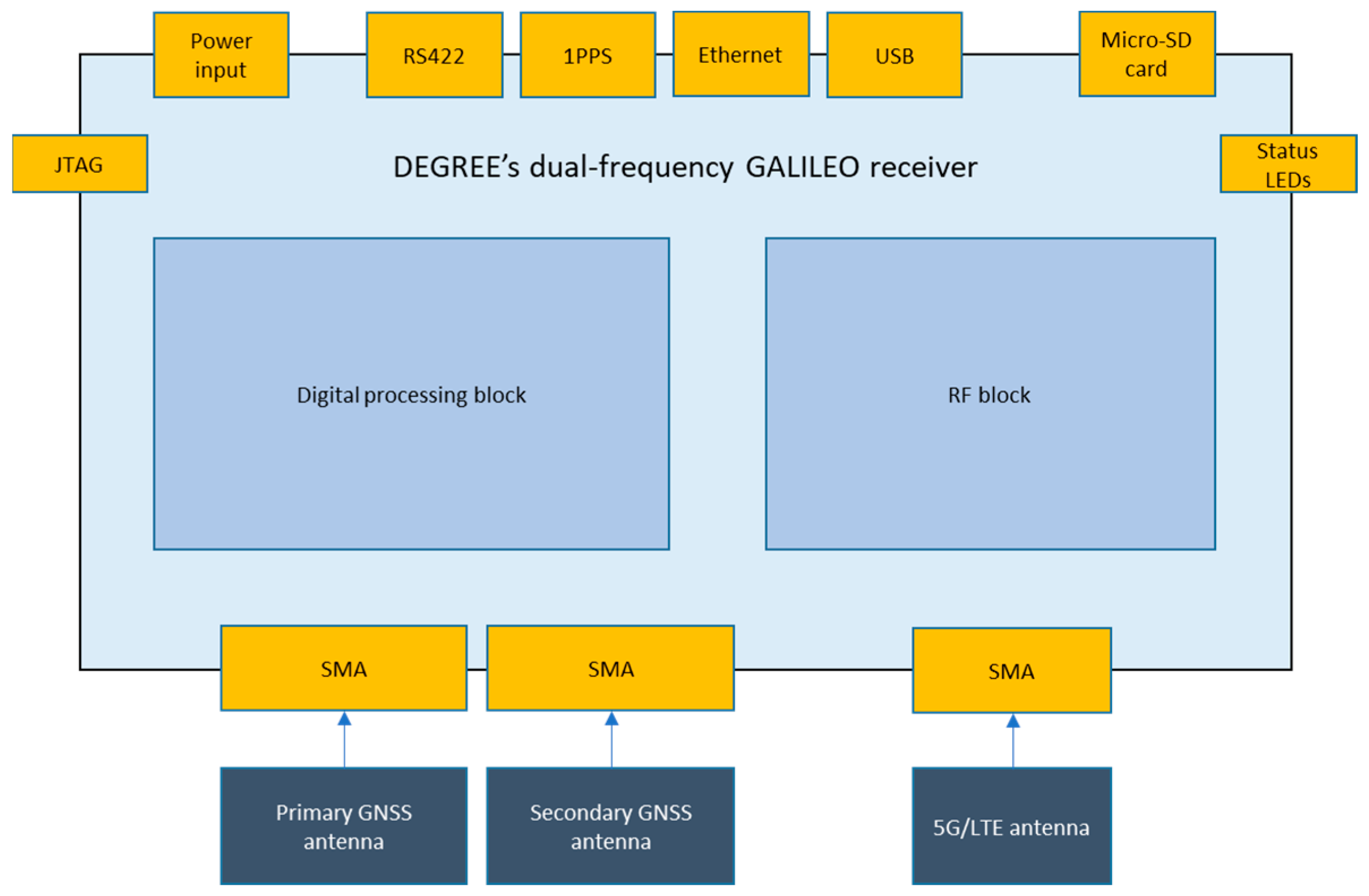
The receiver is composed of two stacked boards, called the RF board and digital board (see
Figure 1). The RF board includes the RF front end of the receiver, ADCs (Analog to Digital Converters), saw filters, and RF splitters (
Figure 2a). The receiver is prepared to receive GNSS signals from two different antennas for heading purposes. While the primary RF chain is L1/E1/L5/E5a/E6, the second one is L1/E1 only, for true heading purposes. A third RF chain tuned at 700 MHz is 5G ready for signal-of-opportunity positioning and timing.
The RF board integrates a COTS GNSS receiver. This secondary receiver provides redundancy and integrity. While redundancy is achieved by means of a second set of GNSS measurements and PVT information, integrity is achieved by comparing the PVT estimations of the primary and secondary GNSS receiver. It is worth noting that with it having two separate receivers with different clocks, care must be taken when comparing data products from both receivers.
The last component of the RF board is the IMU. This IMU offers the capability to be PPS synchronized with external sources. In DEGREE, the primary or secondary GNSS receiver provides a PPS signal, so the IMU is synchronized with the receivers. The loosely coupled sensor fusion algorithm runs inside the IMU, providing fused measurements based on the EKF (Extended Kalman Filter) algorithm, using PVT estimations from the main or secondary receiver and inertial measurements from the IMU itself.
On the other hand, the digital board includes the QN400’s Zynq 7000 SoC (CPU + FPGA), as well as interfaces to interconnect with the RF board, user interfaces such as ethernet, RS-422, or JTAG, and status LEDs (
Figure 2b).
The major features of the DEGREE receiver are shown in
Table 2.
Although the DEGREE receiver is a brand-new development in the frame of the EUSPA (EU Agency for the Space Programme)’s DEGREE project, it receives all of its heritage from Qascom’s state-of-the-art QN400 GNSS SDR-based receiver [
6] The DEGREE receiver has been consolidated as a strategic product inside Qascom’s business roadmap.
5. Test Campaign and Scenarios
Two types of tests are defined in order to validate the DEGREE receiver.
The first batch of tests are a mixture between simulated and real scenarios. Simulated scenarios are executed using a Spirent GSS7000 GNSS simulator (Spirent, Crawley, UK), foreseeing both static and kinematic scenarios. In these scenarios, it is envisaged to simulate spoofing attacks at a signal and data level to validate the anti-spoofing capabilities of the receiver. Jamming attacks are also foreseen.
For kinematic tests, the receiver is installed in a car. The scenario is a mixture of urban and rural environments, with narrow streets and 90 degree turns, trees, light poles, and other cars parked on roadsides, but also wider, open-sky roads with taller trees and more dense vegetation, bridges, and industrial buildings. With this scenario, it is intended to evaluate receiver tracking robustness when working on severe multipath scenarios. Moreover, this scenario allows us to evaluate the performance of the sensor fusion solution (GNSS+INS) against the GNSS-only solution and to characterize system continuity and availability in challenging environments.
The second batch of tests consists of real flight tests in real drones.
The receiver will be integrated with the flight control and navigation solution of the drone. The navigation control solution consists of an on-board segment, consisting of the autopilot, the sensor suite, the actuators, as well as the on-board payloads and a ground segment that, in turn, is made up of a ground control station, a joystick, and a mission planning, monitoring, and management SW.
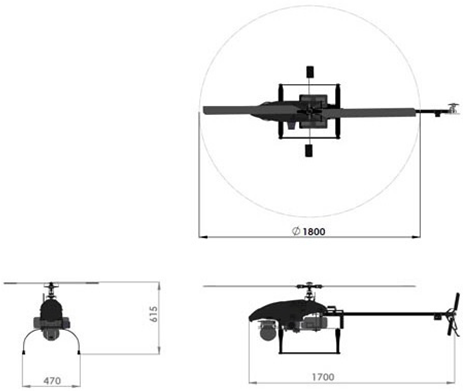
In order to achieve the best possible results, the tests will be conducted in both a fixed-wing and rotary-wing platform. Both platforms are contained within the specific category, in accordance with EASA (European Union Aviation Safety Agency) legislation. These platforms are capable of mounting all the necessary devices for the flight tests and can reproduce a more stable flight with higher inertial movements.
Table 3 summarizes the characteristics of the two test platforms in which the DEGREE receiver will be installed.
6. Galileo Services on UAVs
6.1. E1 OSNMA
By default, the DEGREE receiver is configured to execute authentication operations using OSNMA protocol. This allows the receiver to authenticate Galileo E1 I/NAV messages. Four different authentication modes are defined for the DEGREE receiver.
In the first mode, called “OFF” mode, the navigation engine does not discard any ranging source that fails the authentication. In other words, the DEGREE receiver uses all ranging sources available, providing the best position accuracy possible. Indeed, there is a major risk that spoofed satellites will penetrate the navigation engine, faking the PNT (Positioning Navigation Timing).
The second mode is called “LOOSE MODE”. In this mode, the navigation engine discards all those sources that explicitly fail the authentication process through OSNMA. In the first version of the DEGREE receiver, only Galileo E1 satellites can be authenticated using OSNMA; thus, only Galileo E1 satellites can fail the authentication. For the rest of the sources, i.e., GPS L1/L5 and Galileo E5a/E6, the authentication status is unknown and, hence, is valid to be used by the navigation engine since these sources do not explicitly fail OSNMA authentication. Future versions of Qascom’s OSNMA implementation will add support for GPS and Galileo L5 authentication.
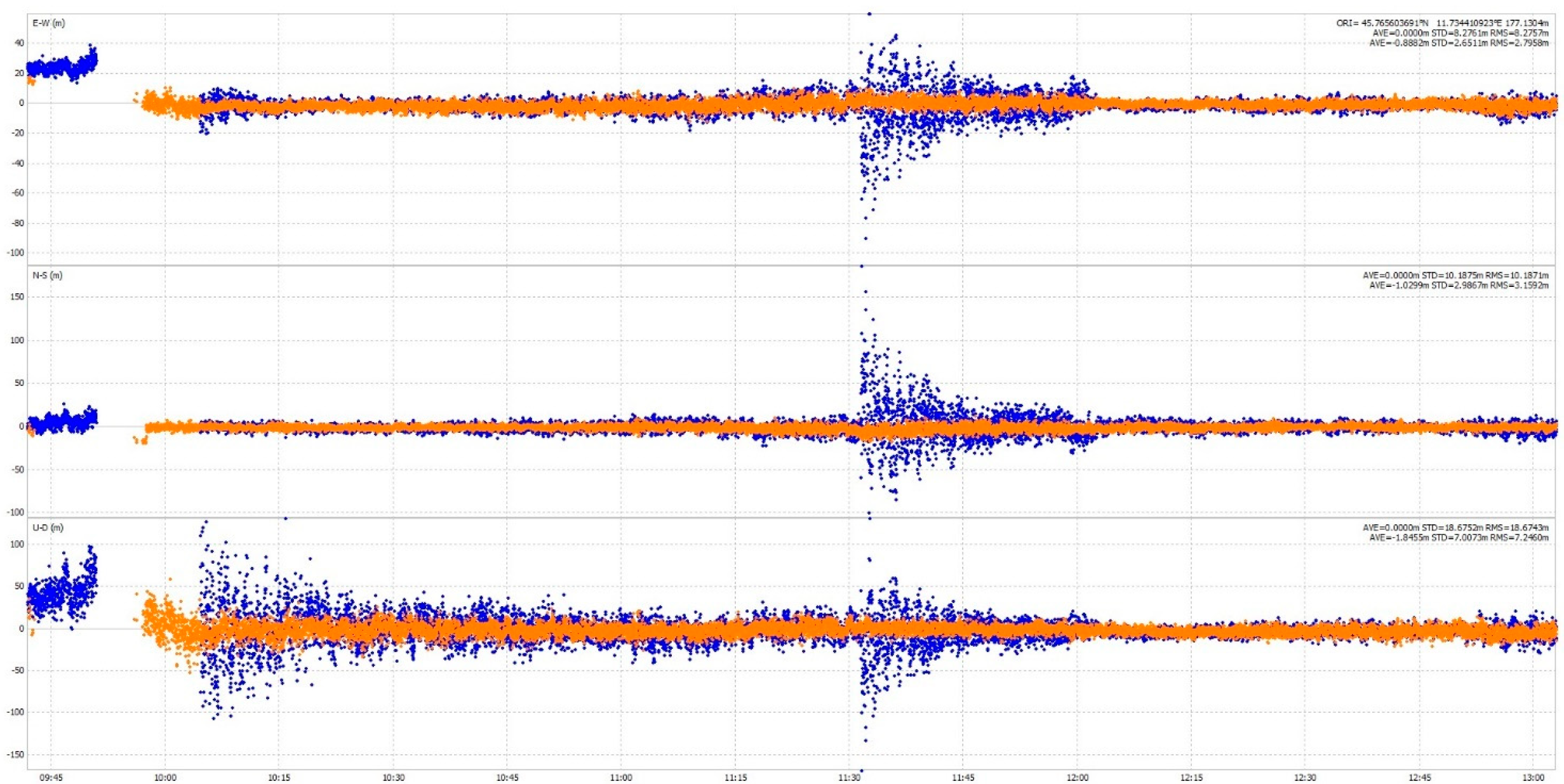
The third mode is called “STRICT MODE”. This is the safest mode since the DEGREE receiver only uses authenticated sources. This means that in this version of the DEGREE receiver, only Galileo E1-authenticated sources are used in the navigation engine to compute the PVT (Position Velocity Time). While this is the most robust mode in terms of safety against navigation data spoofing, it is the mode that offers less position accuracy since only Galileo E1 satellites are used to compute the PVT.
Figure 3 shows the position performance when working in LOOSE MODE (orange plot) and STRICT MODE (blue plot).
While these modes can be selected by the user through receiver configuration, a fourth mode called “AUTOMATIC MODE” can also be selected to improve the flexibility of the system. If no spoofing is detected while working in STRICT MODE, the receiver changes to LOOSE MODE to increase positioning accuracy. Instead, if the receiver is working in LOOSE MODE and an authentication failure occurs, the receiver switches to STRICT MODE, assuming there might be other ranging sources spoofed.
6.2. E6 HAS
One of key parameters evaluated when deploying the DEGREE receiver in an operation is the accuracy required by the operation itself. Certain operations may require sub-meter accuracy, and while RTK or standard PPP can achieve centimetre accuracy, they rely on either base stations and radio links with the rover station or external products such as precise orbits and clocks produced by third-party entities.
The solution to this requirement, while operating in real time and in standalone mode, is the usage of Galileo-provided PPP correction, transmitted in HA messages in an E6 signal. To that purpose, the DEGREE receiver reports if HAS corrections are received and applied to the satellite orbits, clocks, and biases. Hence, a dedicated flag is issued to report the previous conditions. Note that the flag is only issued if the Galileo E6 signal is set to be used in the DEGREE receiver, otherwise the flag is not issued. Moreover, the flag is issued for every satellite in view since PPP corrections are available for GPS L1/L5/L2 and Galileo E1/E5a/E5b/E6 frequencies.
7. Towards a Standardized Product
The DEGREE project is targeting TRL 7 for the DEGREE receiver [
7]. Although it is not foreseen to achieve enough maturity for a commercial product, the DEGREE project works in this direction. By the end of the project, a specific category SAIL IV GNSS receiver will be designed, developed, and extensively tested through test campaigns, including real flight tests, as explained in
Section 5.
While the manufacturing of the DEGREE receiver and the integration of latest Galileo services such as E1 OSNMA and E6 HAS is of utmost importance for the project, the DEGREE consortium also tackles the standardization of UAS receivers for specific category operations. To do that, the consortium is actively collaborating with EUROCAE to consolidate a new standard yet to be released by 2024. With this effort, the DEGREE consortium expects to help the industry and operators to embrace a common standard to simplify the development and deployment of GNSS receivers for specific category UAS operations.
Indeed, while it is difficult for the consortium to adapt the design of the DEGREE receiver to a standard that is yet being defined, we are providing all the knowhow, knowledge, and lessons acquired during the project to EUROCAE working groups, bearing in mind a possible DEGREE project continuation to refine the TRL 7 DEGREE receiver towards a TRL 9 commercial product that implements the standard we are helping to establish.





{kind=link}
{kind=link}
{kind=link}