2.2. Problem Formulation
To assess the navigation performance, the measurement equations are presented. The range
between the unknown position of the i-th LF
and the known position of the j-th HF
is
. For the i-th LF, the measurement vector
is formed as a function of
M HF, where
:
To solve this equation, it is typically linearized around the current estimate. One can then solve for the position using the Least-Squares method. The linearized measurement equation is a function of the measurement matrix
H, whose rows are the normalized vectors
from the HF to one LF:
In order to assess the navigation performance, one is interested in the covariance matrix of the position estimate to evaluate the accuracy:
Here,
is the pseudoinverse
as H is generally not invertible. As the range measurements are assumed to be independent, the covariance matrix of the range measurements
is assumed to be diagonal, i.e.,
. For the presented measurement matrix
H, it follows directly:
The covariance of the position estimate, and hence the navigation accuracy, is dependent on the range measurement accuracy
in
and the geometry of the ranging partners to the LF, which is captured via
G. As
G is dependent on
H, which is formed using the geometry of the HF to the LF as shown in Equation (
2),
G is also referred to as the geometry matrix.
As a quality metric, the Dilution of Precision (DOP) is calculated to characterize the effect of errors in the range domain on the position estimate as a function of the geometry. For example, the Horizontal Dilution of Precision is calculated as
As initially assumed, all UWB measurements
are i.i.d and stationary; thus, the navigation accuracy can only be maximized by optimizing the geometry of the HF positions relative to the LF positions. The optimization of geometry is a well-known research field within the domain of optimal satellite selection for GNSS positioning. For example, in [
5], the authors found the relation between minimizing GDOP and maximizing the determinant of
, which is related to the volume of the resulting polytope. However, in [
6], the authors conclude that with an increasing number of ranging sources, the correlation between GDOP and volume decreases significantly. An additional constraint should be added as satellites closer to the regular polyhedron should be favored.
Unlike the GNSS satellite selection problem, here the satellite position, i.e., the HF position, is not given, but the optimization variable is. For UAS applications, most related work concentrates on the optimal positioning of UWB ground beacons. For example, in [
7], denied environments are explored with fixed ground stations whose configuration is chosen manually. To investigate the optimal positioning of ranging sources, this paper relies on a couple of assumptions. First, the vertical position can be estimated, in addition to a GNSS- and range-radio-based estimation, with LiDAR scanners, laser altimeters, and baro-altimeters. Thus, for further optimization, the optimization goal is restricted to the horizontal 2D plane; therefore, the problem reduces to a minimization of
. Furthermore, the HF should be as low as possible to increase the observability of the LF position within the horizontal plane. Given this assumption, UAS positions are also restricted to the 2D plane, i.e.,
. As LF operate close to obstacles, e.g., facades of buildings, the HF need to be positioned within an azimuth range of
, which further reduces the region of feasible HF locations.
2.3. Single Low-Flier Optimization
Before covering the problem of optimizing the geometry of multiple LF, the optimal positioning of HF for a single LF is derived. As shown in Equation (
2), the H-matrix consists of unit-length vectors from the HF to the LF, i.e., polar coordinates with an azimuth
and a range of 1.
As H is real valued, it can be decomposed into
using the Singular Value Decomposition, where
is a diagonal matrix containing the singular values and
contains the related right-singular vectors. As
can be decomposed into
, the geometry matrix can be rewritten as
Here, it is used that
V and
U are unitary matrices, i.e.,
. The geometry matrix can therefore be interpreted as a Gram matrix, whose diagonal entries
are formed of
. The squared HDOP can therefore be rewritten as
For
M to be linearly independent unit-length vectors in H, the rank of
is assumed to be
M. As the squared sum of singular values is equal to the the trace of
, the squared singular values sum up to
M:
. To minimize HDOP,
shall be minimized, which results in the following minimization problem:
The function can be minimized by maximizing , which yields , and most importantly, . This means the HDOP minimization problem can be thought of as the problem to distribute the HF directions, such that the covariance ellipse of becomes a circle. Then, the major axis equals the minor axis and the largest singular and the smallest singular value are identical, which minimizes the HDOP.
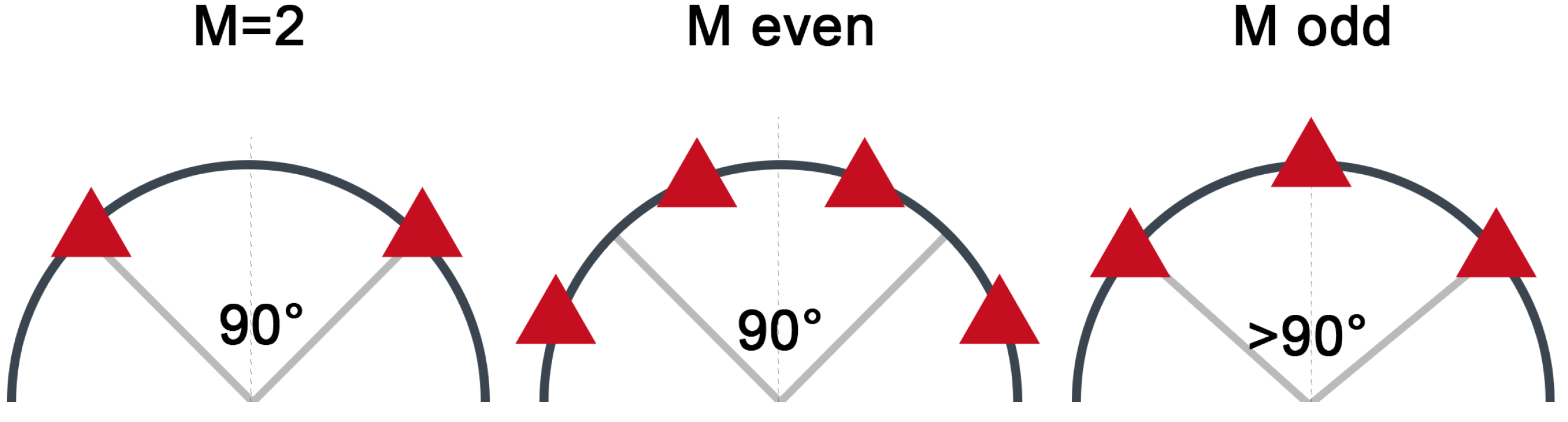
For two HF, the problem of HF positioning is trivial as the HF should be positioned such that they form an orthogonal basis. The angle between two HF and an LF should therefore be 90 degrees to maximize the HDOP for that LF.
For the number of HF being larger than two and even, pairs of HF can be symmetrically and evenly distributed around the
directions, which also directly follows from the symmetry conditions. An overview is given in
Figure 2.
For an odd number of HF, one HF is placed at the symmetry line between the two circle’s quarters. It can be seen that for
one right-singular value will point towards this direction. Assuming this direction to be the
y-axis and the orthogonal axis to be the
x-axis, the problem can be formalized as
As all vectors are centered, the mean value
is zero. Transforming the equation to polar coordinates and using that, the radius equals to one, and the equation becomes
Applying the knowledge that one HF is located on the symmetry axis, i.e.,
, Equation (
20) shows the optimal azimuth angle
(angle between the mirror axis and the HF) for M being odd:
For 3 HF, i.e., , the optimal azimuth angle between the symmetrically chosen HF and the one on the symmetry line is , for is .
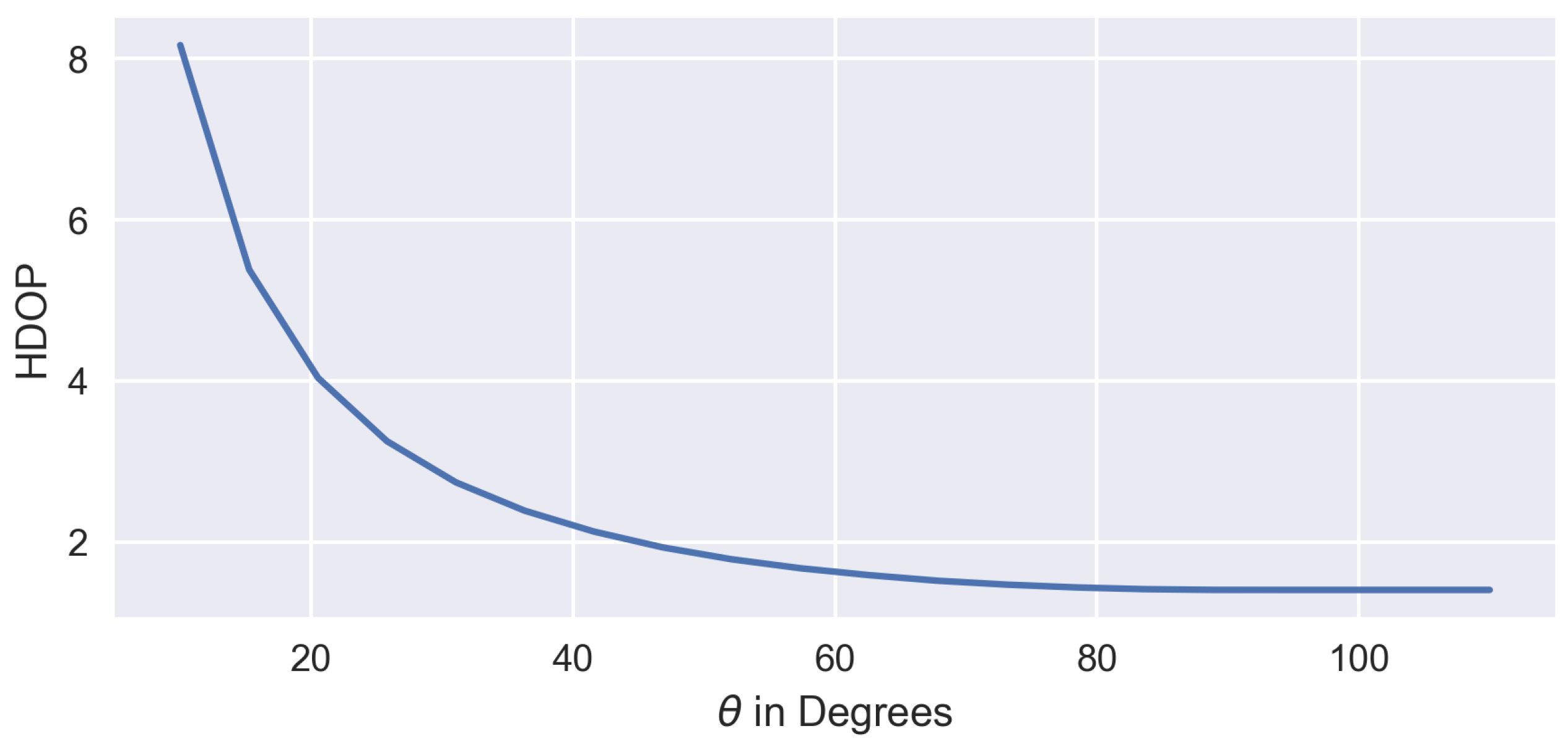
The LF operate close to obstacles. Especially when flying around corners, the feasible area for the HF positioning decreases as it is essential to keep the Line-of-Sight condition between the HF and all LF. Being at orthogonal sides of a building, the overlapping area, and thus, the feasible area for HF positions, is half the size as before. To asses the effect of obstacles reducing the possible azimuth range, a Monte Carlo simulation was conducted for
HF. The feasible
range was restricted from
to
. For each scenario, one million uniformly distributed independent position combinations were generated for the two HF. The combination with the best HDOP was saved and is shown in
Figure 3 as a function of the maximum allowable azimuth. It can be seen that for smaller azimuth ranges, the problem tends to become more singular, resulting in an increase in HDOP. For ranges greater than
, two vectors can always be found, which are an orthonormal basis for the LF. For two HF, this is also the optimal condition, which means the HDOP is
.
2.4. Multi-User Optimization
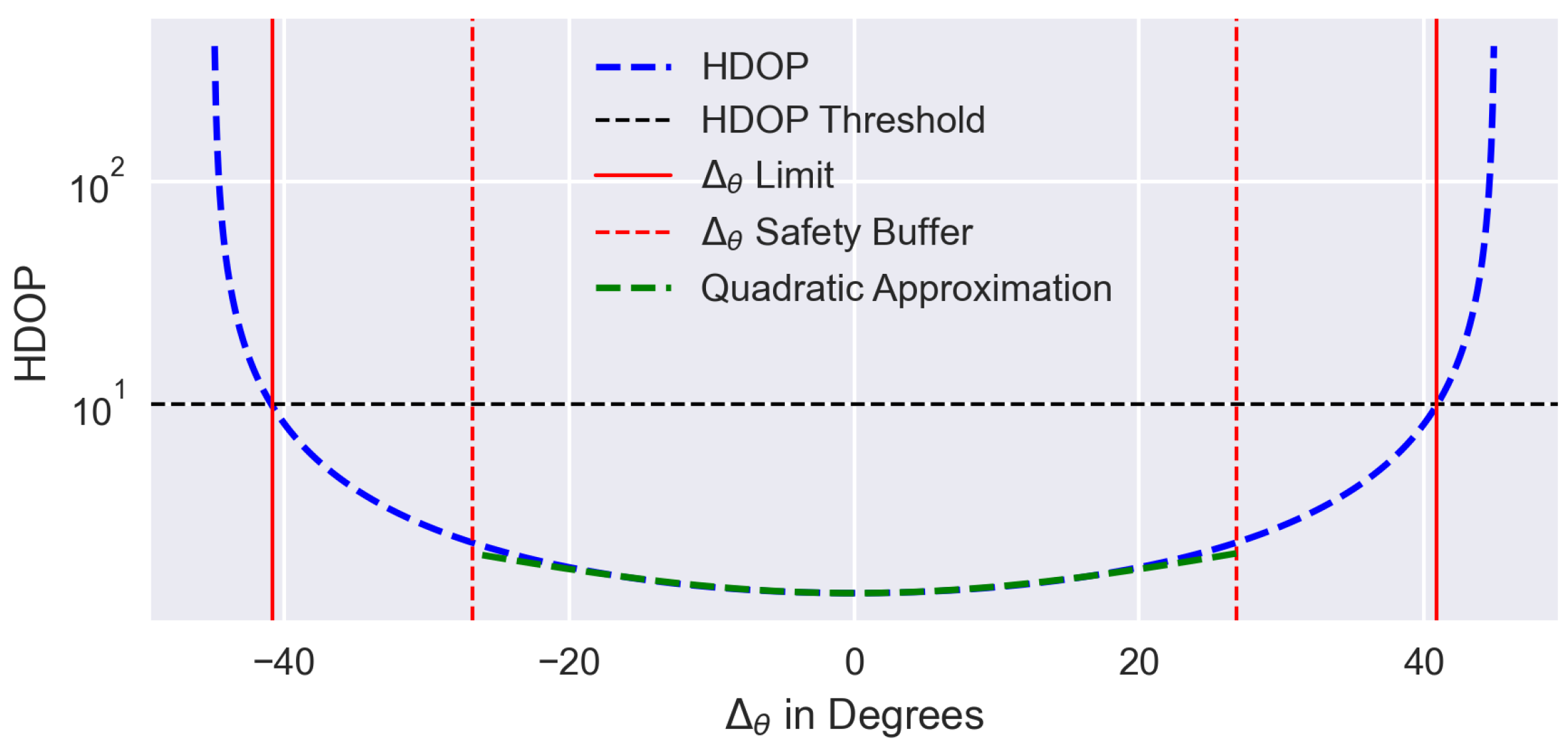
To optimize the geometry for multiple LF, an objective function must be derived that can be minimized using the optimization algorithm. An important property is the impact of a suboptimal geometry on the HDOP. For
HF, HDOP is shown in
Figure 4. Additionally, a threshold is set at
. During operation, the HF are affected from GNSS-based position estimation uncertainty and they may show unmodeled dynamics. For a position uncertainty of
m and a safety factor of
, the feasible azimuth range is further reduced on both sides by
Here, is the minimum distance from the HF to an LF, which comes from the assumption that HF should have an elevation angle as low as possible to increase the observability of the LF position within the horizontal plane. Furthermore, it can be seen that within the safety buffer interval, the HDOP can be approximated using a quadratic function.
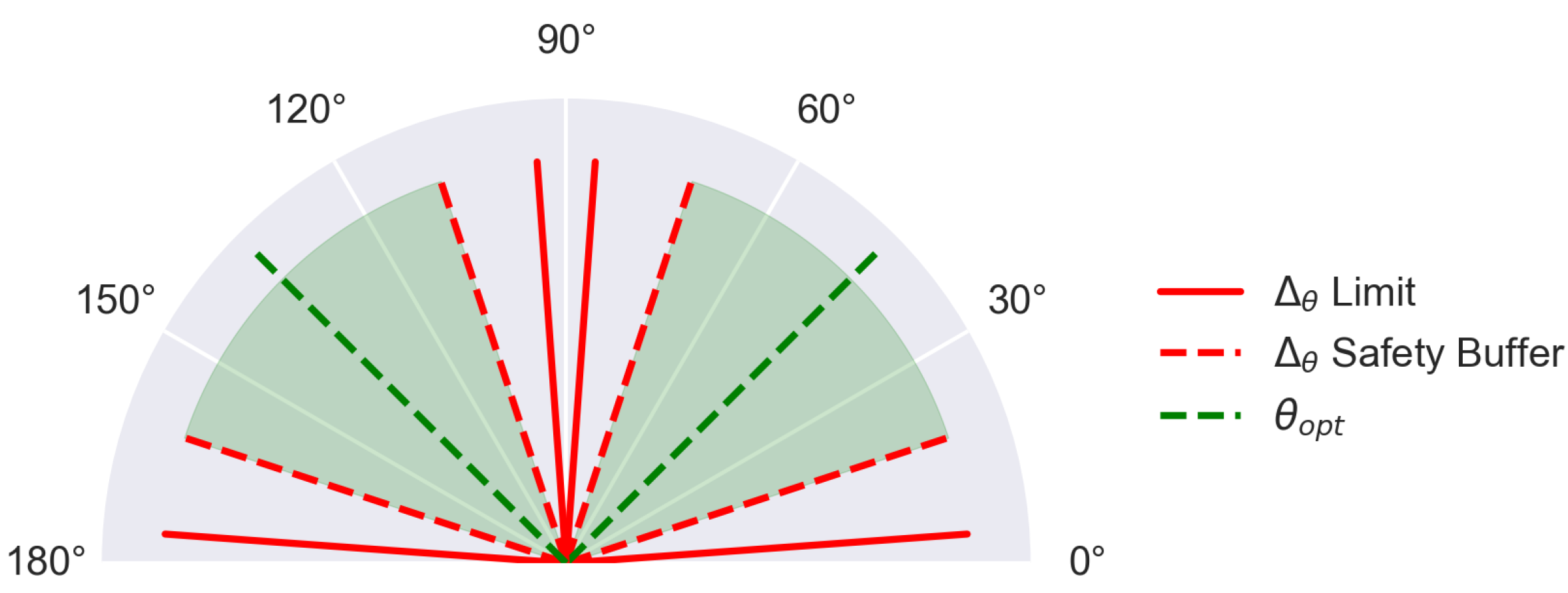
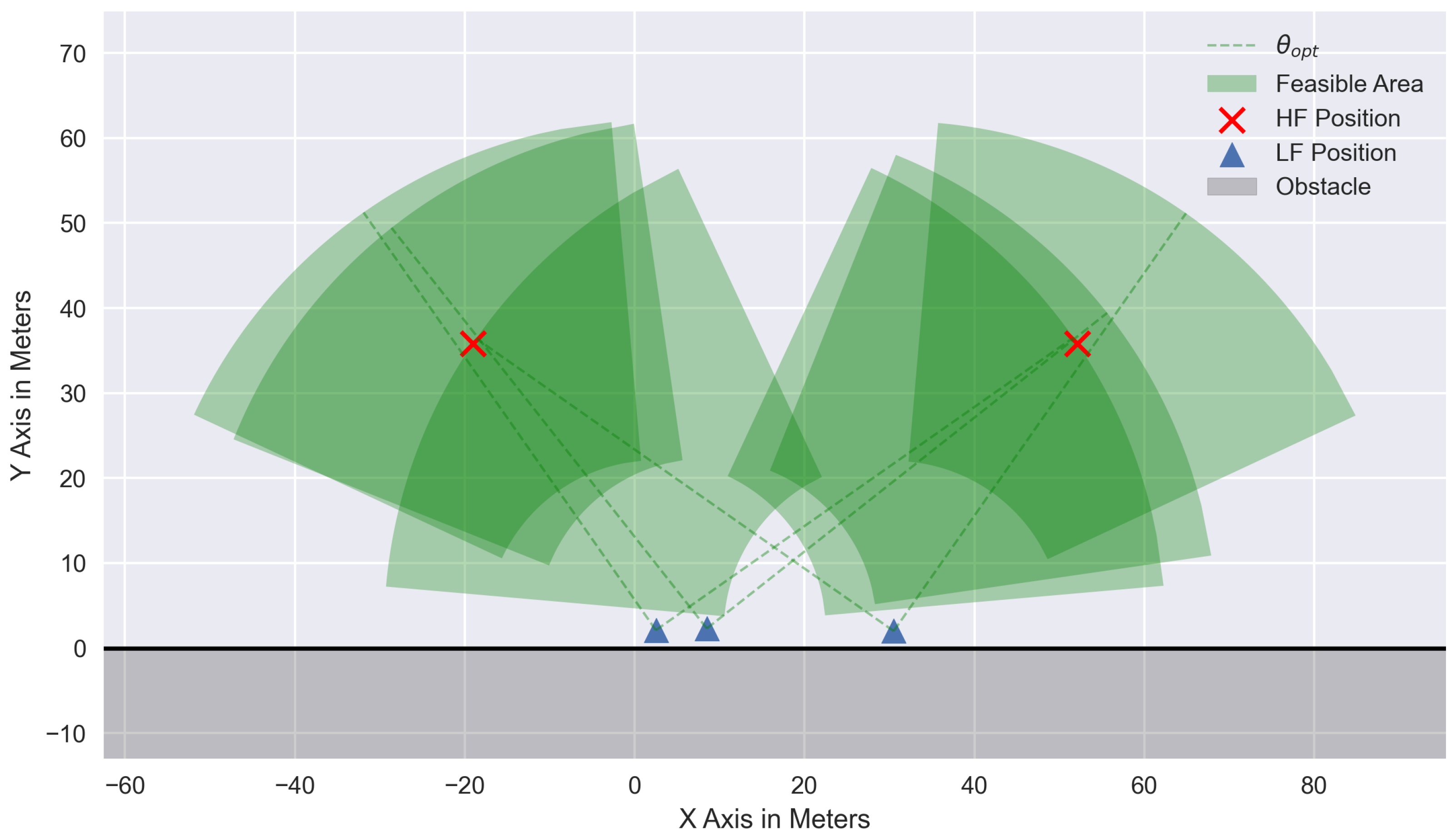
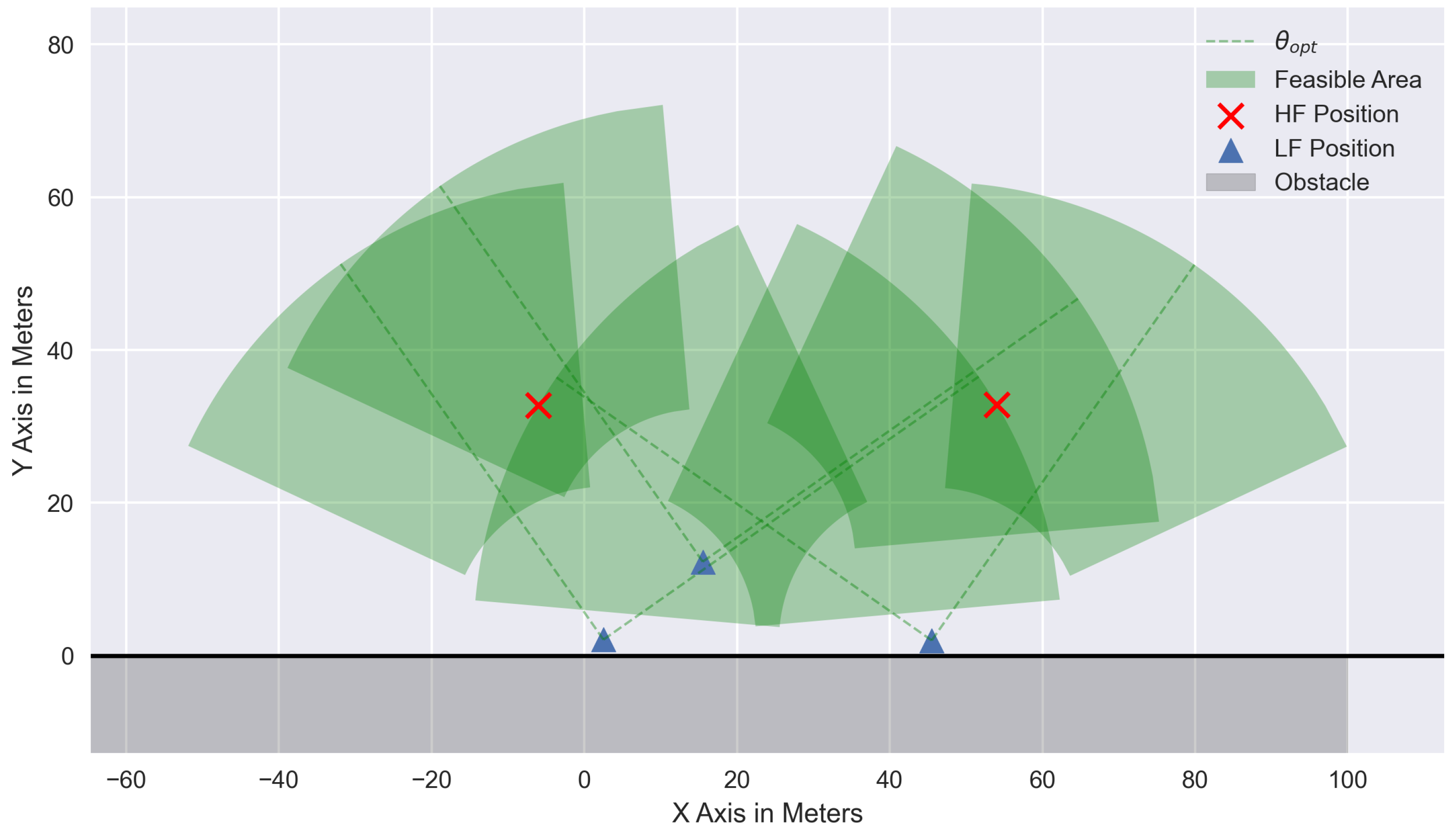
To visualize the effect of the safety buffer on the feasible area for HF positioning, the limits are shown in polar coordinates in
Figure 5. It can be seen that rather than a direction, the feasible area is now a valid range in which the HDOP is likely to be below the value of
.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}