Abstract
In this article, we show the first capacitive strain sensor using a four-component helical auxetic yarn (HAY) structure. We demonstrate a prototype sensor that achieves a gauge factor (GF) of up to two and compare our experimental results with a simple geometric model of the HAY system. In addition to a high sensitivity, this sensor configuration is easily manufactured, suitable for textile integration, and produces a repeatable response.
1. Introduction
Textile sensors that use capacitance to transduce strains are generally favoured for their repeatable signal that is relatively immune to time- and history-dependent effects [1,2]. Compared with piezoresistive strain sensors, the capacitive signal is directly related to the geometry of the electrodes rather than a complex percolating network in a polymer composite. However, geometrical dependence also places limits on attainable sensitivity. While piezoresistive sensors may reach gauge factors (GFs) in the thousands, capacitive sensors using bulk materials are often limited to GF = 1 [1,3]. Several studies have demonstrated capacitive strain sensors made from auxetic metamaterials that achieve GF > 1. Conventional materials, using non-negative Poisson’s ratio, narrow in the direction perpendicular to the applied strain, which competes with the lengthening along the strain axis, thereby limiting the magnitude of the change in electrode area. Auxetic behaviour allows the electrode dimension to also expand in the perpendicular direction during a strain, permitting higher GFs to be reached. Obtaining greater sensitivity allows smaller movements (such as fine motor activities or tremors) to be more easily measured in a wearable device.
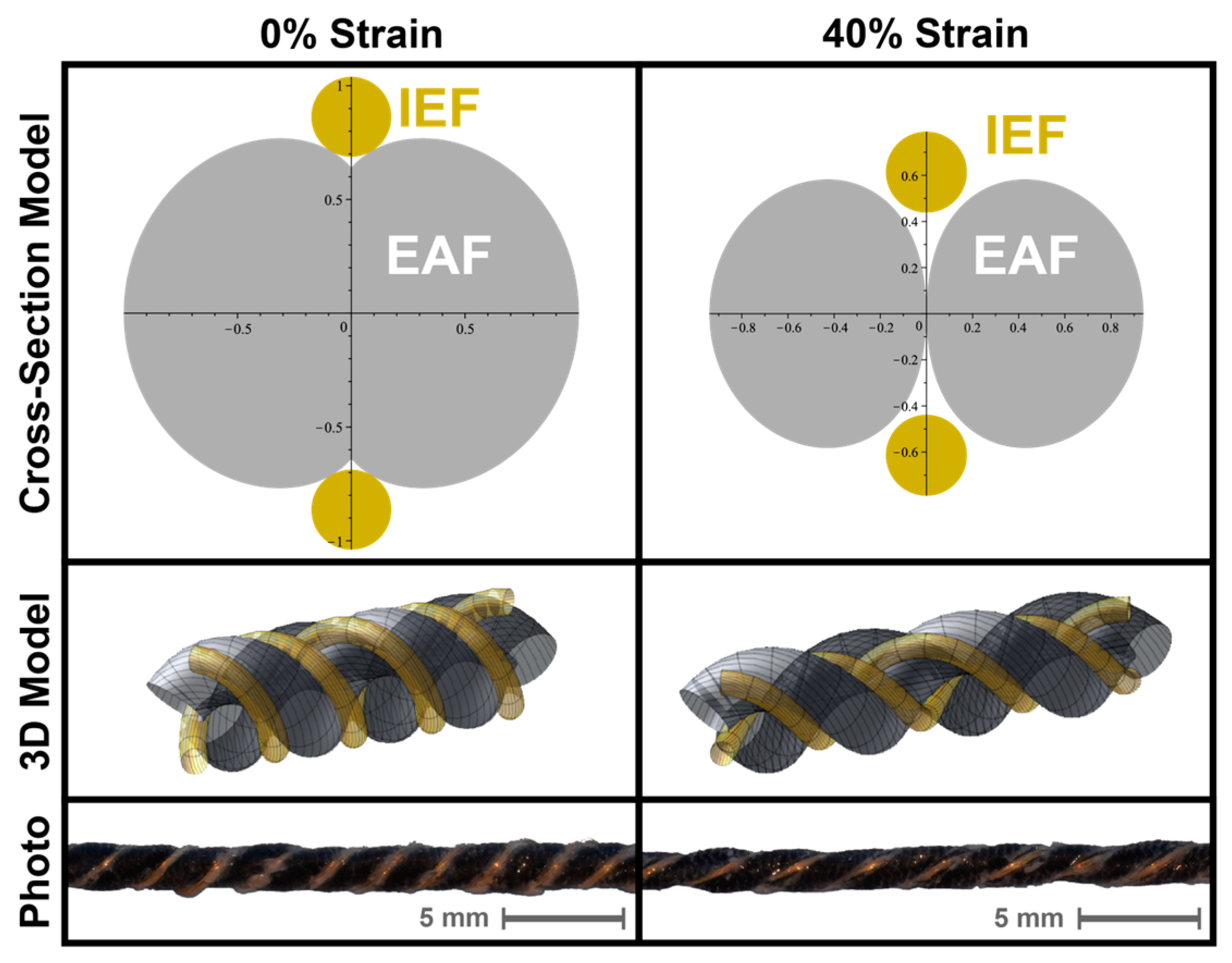
Auxetic capacitive sensors have been shown in the parallel plate [4] and interdigitated [5] formats. We have previously demonstrated a sensing yarn better suited for textile integration based on the two-component helical auxetic yarn (HAY) [6]. Sensing fibres using a four-component HAY is thus a natural progression because it has a more obvious auxetic mechanism [7]. The four-component HAY structure consists of two electrically insulating elastic auxiliary fibres (EAFs) that are braided into a double-helix structure. These fibres stretch during the strain of the sensor and serve to create the dielectric space between the capacitor electrodes. Within the grooves of this double helix lie two inelastic electrode fibres (IEFs). The IEFs are inextensible, electrically conductive, and are brought closer together during strain as their major diameter decreases. One major advantage of this sensor type is that the conductive fibres do not have to be elastic, greatly expanding the choice of materials for the IEFs. The capacitance between the IEFs is the analytical signal of the sensor.
2. Materials and Methods
2.1. Sensor Fibre Fabrication
The prototype “HACS4x” sensor was fabricated using a braiding machine (BAM-635, BuildaMOC, Sevilla, ES) to twist a pair of 1 mm elastic fibres around each other with a relaxed helical pitch of 2.8 mm. These fibres were commercially available (Prym GmbH, Stolberg, Germany) and consisted of an elastane core sheathed with polyester. Two strands of approximately 0.35 mm diameter conductive thread (Liberator, Syscom Advanced Materials, Columbus, OH, USA) were then manually wound around the elastic pair, with one in each groove. The yarn complex was then dip-coated in a solution of styrene-isoprene-styrene (SIS) polymer in pentane to keep the structure aligned well, reduce the chance of shorting, and improve durability and washability.
2.2. Sensor Characterization Tests
The prototype sensor was mounted on a universal testing machine (UTM) (Electropuls E3000, Instron, Norwood, MA, USA) with custom-made fixtures. An inductance-capacitance-resistance (LCR) meter (IM3536, Hioki Corporation, Nagano, Japan) was used to record capacitance during the strain tests and was synchronized to the UTM with a custom LabVIEW script. For the sensitivity characterization test, the sensor was strained three times to 40% at a rate of 1%/s. For the cyclic durability test, the sensor was strained from 5% to 35% with a 0.5 Hz sinusoidal waveform for 1000 cycles.
2.3. Geometrical Model
To investigate the effect of design parameters (EAF and IEF diameters, helical pitch, and EAF Poisson’s ratio), we developed a computational geometric model using Maple (Waterloo Maple Inc., Waterloo, ON, Canada) for the sensor geometry at an arbitrary strain. The yarn components are modelled as helices in 3D space. From the geometry, the capacitance can be estimated using the parallel wire model. Further details about the geometrical model are presented in the Supplementary Materials.
3. Results
We performed tensile tests on the UTM to characterize the sensor response and evaluate long-term durability. We modelled the sensor prototype based on its fabrication parameters, as described above. These parameters were chosen because they led to the smallest helical pitch (and thus tightest helix) reasonably obtainable with the braiding device and EAF fibres. A tighter helix allows higher strain ranges to be accessed. Figure 1 shows the predicted 3D geometry, resulting cross-sections, and the photographs of the sensor when relaxed and when strained to 40%.
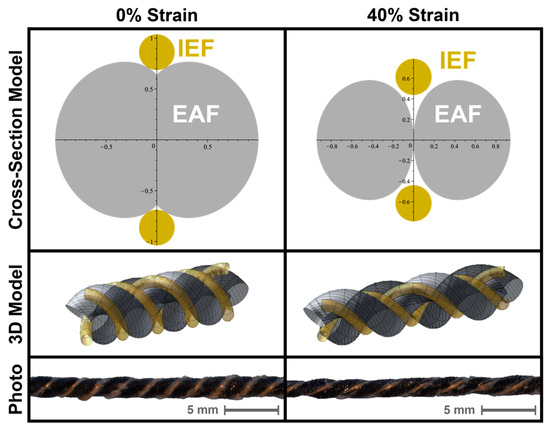
Figure 1.
Geometric model, 3D rendering, and photographs of the sensor at 0% and 40% strain.
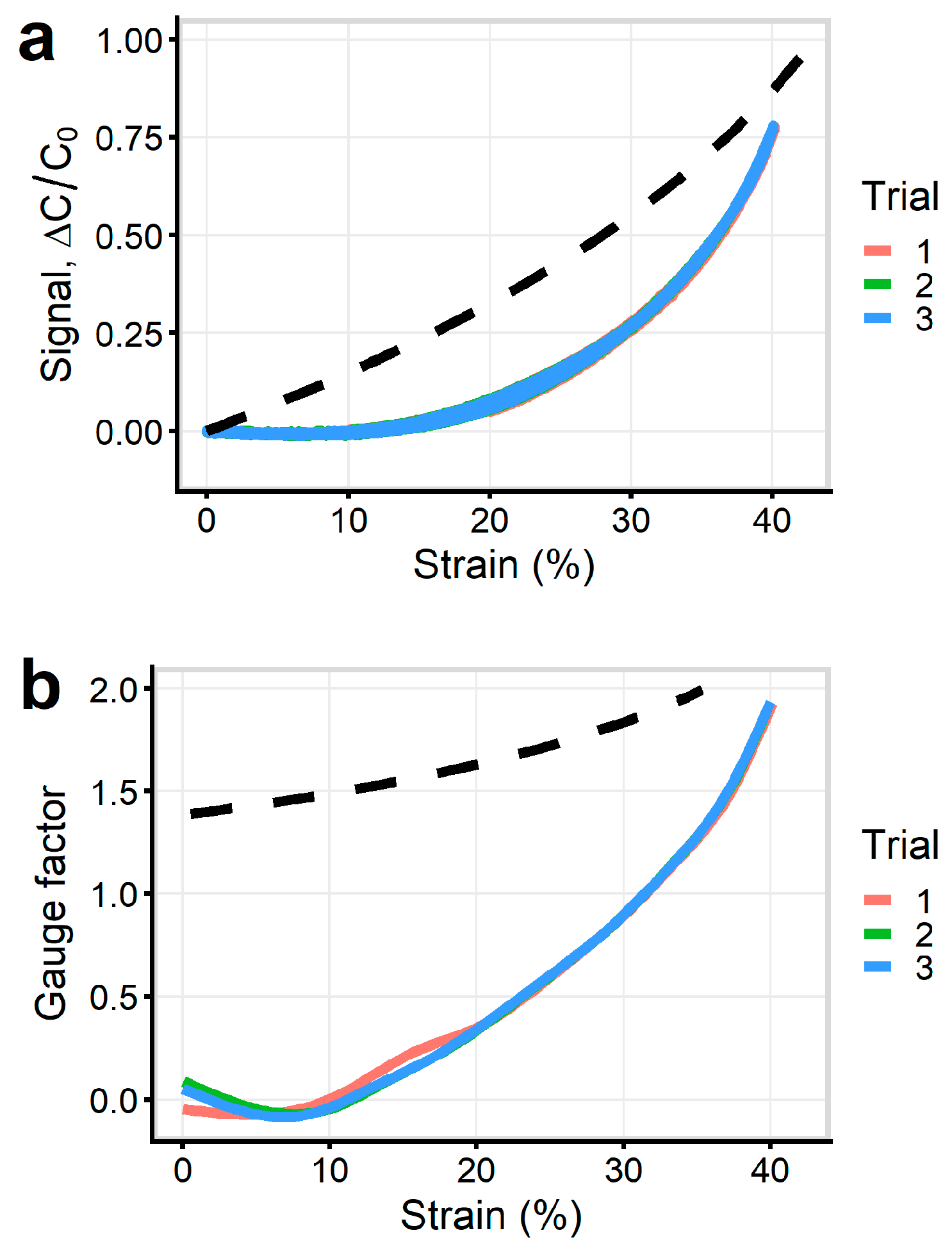
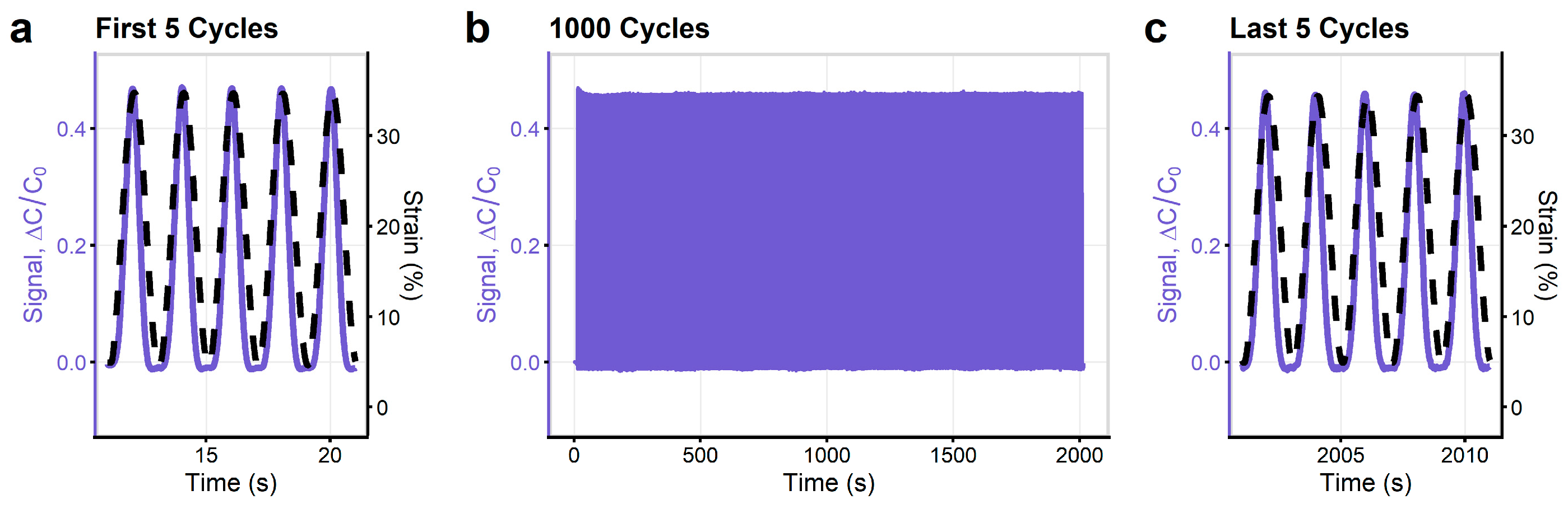
For the electrical response of the sensor, we found an exponentially increasing signal and GF of up to two within the 10–40% strain range, as shown in Figure 2. The normalized response () of the sensor was highly repeatable across three repetitions of straining the sample to 40%. Using the geometrical model, we estimated the sensor response and gauge factor. While the response of the sensor follows a similar curve to that from our model, the experimental response remains flatter at low strains, which also reduces the initial gauge factor. We also performed a long-term cyclic test to evaluate the durability and drift of the sensor, with the results shown in Figure 3. We observed a negligible difference in response after 1000 cycles.
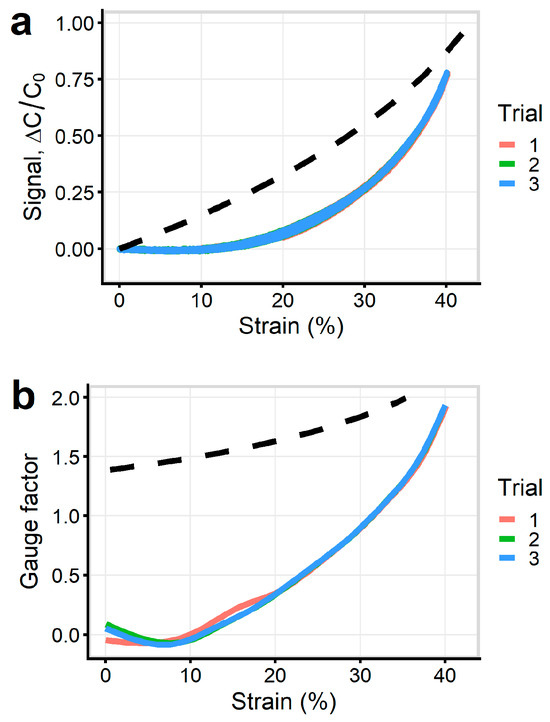
Figure 2.
(a) Sensor response versus strain across three trials with the same sample compared with the model prediction (black dashed curve); (b) sensitivity (GF) versus strain compared with the model prediction (black dashed curve).
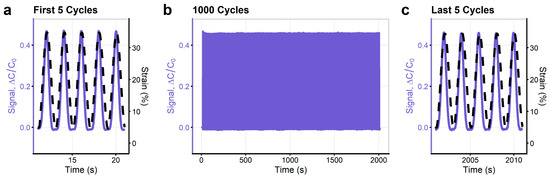
Figure 3.
(a) Sensor response versus strain for first 5 of 1000 cycles; (b) sensor response across 1000 sinusoidal cycles; (c) sensor response versus strain for last 5 of 1000 cycles.
4. Discussion
As the sensor is strained, the distance between the IEFs decreases and the EAF diameters decreases as they extend. Depending on the initial parameters, the IEF coils may decrease in diameter faster than the total EAF diameter, causing an increase in diameter for the yarn as a whole and thus the auxetic behaviour. For the initial parameters studied here, auxetic behaviour was neither observed nor predicted using the model for low strains. However, it is the nonlinear narrowing of the IEF coils that still produces GF > 1, which in this case is for strains above 30%.
The difference between the predicted and measured response was quite large, particularly at low strain values. We suspect that this is partially attributable to slack in the conductive thread wrapping. The elastic fibres are modelled with nearly exact geometry (despite being locally rigid) and the conductive thread is modelled with a circular cross-section. The main assumptions of the model are as follows: (i) the fibres are locally stiff, meaning that we neglect the force and any resulting indentation between them; (ii) the IEF initial condition in the grooves is defined through point contact with both EAFs in the cross-section, and their subsequent narrowing occurs irrespective of the EAFs; (iii) the IEFs have a circular cross-section. Assumption (ii) is sufficient for reasonable helical pitches. Assumption (iii) allows us to use the formula for the capacitance of parallel wires as an approximation. The deviation of the IEFs from a circular cross-section should be negligible in the capacitance calculation because the distance between the IEF fibres dominates.
5. Conclusions
The four-ply HAY structure has several advantages for capacitive strain sensing. The auxetic behaviour and nonlinear narrowing allows for the GF > 1. The conductive elements may be non-elastic, thereby simplifying construction and increasing conductivity. The yarn is manufactured using a conventional spinning process that is easily scalable and is extremely suitable for textile integration. We found the response of the sensor to be highly repeatable. Further research directions include repeatability testing using multiple samples, with a possibility of increasing the maximum strain range (likely requiring a tighter helix) and exploring the relationship between the fabrication parameters and the response.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/engproc2023052024/s1, The Maple code for the four-ply helical auxetic capacitive sensor geometrical model is available in our repository as follows: https://gitlab.ethz.ch/BMHT/materials/4-hay-model.
Author Contributions
Conceptualization, T.J.C., C.M. and B.C.H.; methodology, T.J.C., B.C.H. and C.M.; software, B.C.H.; validation, B.C.H.; formal analysis, B.C.H.; investigation, B.C.H., T.J.C. and C.M.; resources, C.M.; data curation, B.C.H.; writing—original draft preparation, B.C.H.; writing—review and editing, B.C.H., T.J.C. and C.M.; visualization, B.C.H.; supervision, T.J.C. and C.M.; project administration, C.M.; funding acquisition, C.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data and scripts required to reproduce the figures in this study are openly available in our repository as follows: https://gitlab.ethz.ch/BMHT/publications/4-ply-helical-auxetic-capacitive-sensors (accessed on 25 October 2023). The geometric model implemented as a Maple script (Maplesoft, Waterloo, ON, Canada) is also available through the ETH Zürich Data Archive at https://doi.org/10.5905/ethz-1007-737.
Conflicts of Interest
Authors T.J.C and C.M. are also inventors on a patent covering the technology from reference [6].
References
- Shintake, J.; Piskarev, E.; Jeong, S.H.; Floreano, D. Ultrastretchable Strain Sensors Using Carbon Black-Filled Elastomer Composites and Comparison of Capacitive Versus Resistive Sensors. Adv. Mater. Technol. 2018, 3, 1700284. [Google Scholar] [CrossRef]
- Hannigan, B.C.; Cuthbert, T.J.; Geng, W.; Menon, C. Understanding the Impact of Machine Learning Models on the Performance of Different Flexible Strain Sensor Modalities. Front. Mater. 2021, 8, 639823. [Google Scholar] [CrossRef]
- Nur, R.; Matsuhisa, N.; Jiang, Z.; Nayeem, M.O.G.; Yokota, T.; Someya, T. A Highly Sensitive Capacitive-Type Strain Sensor Using Wrinkled Ultrathin Gold Films. Nano Lett. 2018, 18, 5610–5617. [Google Scholar] [CrossRef]
- Shintake, J.; Nagai, T.; Ogishima, K. Sensitivity Improvement of Highly Stretchable Capacitive Strain Sensors by Hierarchical Auxetic Structures. Front. Robot. AI 2019, 6, 127. [Google Scholar] [CrossRef] [PubMed]
- Zeiser, R.; Fellner, T.; Wilde, J. Capacitive Strain Gauges on Flexible Polymer Substrates for Wireless, Intelligent Systems. J. Sensors Sens. Syst. 2014, 3, 77–86. [Google Scholar] [CrossRef]
- Cuthbert, T.J.; Hannigan, B.C.; Shokurov, A.; Menon, C. HACS: Helical Auxetic Yarn Capacitive Strain Sensors That Go Beyond the Theoretical Sensitivity Limit. Adv. Mater. 2023, 35, 2209321. [Google Scholar] [CrossRef] [PubMed]
- Ng, W.S.; Hu, H. Woven Fabrics Made of Auxetic Plied Yarns. Polymers 2018, 10, 226. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).