Abstract
The safety impacts of cooperative platooning in mixed traffic consisting of human-driven, connected, and connected–automated vehicles were evaluated. The cooperative platooning, in the case of the mixed traffic control algorithm evaluated here, was cooperative adaptive cruise control with an unconnected vehicle (CACCu). Its safety and string stability were evaluated using a high-fidelity simulation based on real-world vehicle trajectories. An adaptive cruise control (ACC) algorithm was selected for comparison purposes. The results indicate that the cooperative platooning in mixed traffic control algorithm (CACCu) maintains string stability and operates with greater safety than the ACC.
1. Introduction
With the introduction of self-driving automated vehicles and connected vehicles, vehicles can benefit from automation and connectivity. One promising technology is cooperative platooning. Studies have shown that cooperative adaptive cruise control (CACC) can maintain a time headway of 0.6 s between vehicles [1]. Fully connected and automated vehicles can significantly improve mobility, safety, and sustainability by shortening time headway and ensuring string stability [2,3,4]. However, we do not expect that 100% fully connected automated vehicles will be available in the near future. A connected automated vehicle following another connected automated vehicle can engage in cooperative platooning using CACC. However, when it encounters a human-driven, unconnected preceding vehicle, it must fall back to adaptive cruise control (ACC), which can automatically control the vehicle’s longitudinal movement to ensure a safe distance from the preceding vehicle. Although ACC performs better than simple cruise control and is safer than a human driver, it significantly downgrades the performance of the ego vehicle compared to that of CACC. The main reason why ACC does not perform well is the lack of cooperative control between vehicles.
Researchers have explored cooperative platooning control strategies with mixed traffic of connected automated and human-driven vehicles. These include the graceful degradation of CACC (dCACC) based on a preceding vehicle’s estimated acceleration [5], connected cruise control exploring the benefits of communications with an out-of-sight preceding vehicle [6,7,8], and cooperative adaptive cruise control with unconnected vehicles (CACCu) that functions through a control strategy maximizing the string stability of the ego vehicle using the further connected preceding vehicle’s feedforward signal [9,10].
The primary purpose of this paper is to assess the safety impacts of cooperative platooning in mixed traffic, including connected automated vehicles and human-driven vehicles. The remainder of this paper is organized as follows. Section 2 describes the control algorithm selected for this study and the safety assessment measures considered. Section 3 discusses the data used for this study, and Section 4 evaluates the data and presents the key findings. Finally, Section 5 discusses the conclusions and future research.
2. Cooperative Platooning in a Mixed Traffic Control Algorithm and Safety Measures
This section discusses the algorithm for cooperative adaptive cruise control with unconnected vehicles (CACCu) previously developed by Zheng and Park [9]. Figure 1 shows a framework of the CACCu. A key innovation over ACC is the use of a feedforward signal from a further connected preceding vehicle. Unlike ACC, which implements a feedback control using information from the immediately preceding vehicle based on its sensor, CACCu acts in the same manner as CACC by taking advantage of a connected further preceding vehicle.
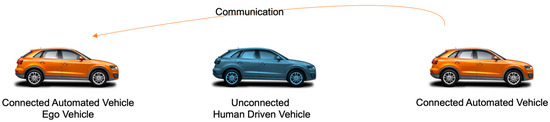
Figure 1.
Cooperative adaptive cruise control with an unconnected vehicle framework.
The authors demonstrated that the virtual preceding vehicle filter attached to the original CACC feedforward filter helped the ego vehicle to stay string-stable at a gap significantly shorter than that in ACC. Both the high-fidelity simulation and field test concluded that CACCu outperforms ACC in regard to string stability, comfort, and sustainability based on the number of speed overshoots, acceleration root mean square, and fuel consumption, respectively [10,11].
As mentioned earlier, surrogate safety measures called time-to-collision (TTC) and the spacing error are used to assess safety impacts. TTC has been widely used in safety assessment in cases when the number of actual crashes is either low or not readily available [12,13]. The spacing error (SE) is determined by the difference between the summation of “ego vehicle speed x desired time headway + jam density” and the gap distance between the ego and preceding vehicles.
3. Vehicle Trajectory Data and High-Fidelity Simulation
The human-driven vehicle trajectories used in this study are from the Next-Generation Simulation (NGSIM) program [14]. Three representative trajectory data sets were carefully selected for analysis. The NGSIM data provide information on the position, speed, and acceleration of each vehicle every 0.1 s. It should be noted that the speed and acceleration data were smoothed to minimize noise and jerks caused by derivations from the position data.
As shown in Figure 1, the scenarios in this study are composed of a series of three or more consecutive vehicles from the NGSIM data. The performance of a human-driven vehicle is evaluated using the ego vehicle (i.e., the first vehicle), while the performance of ACC and CACCu vehicles is evaluated by applying the corresponding control algorithms to the ego vehicle. It is worth noting that the CACCu control algorithm utilizes the second preceding vehicle. For more details on the CACCu and ACC algorithms, please refer to [9]. The simulation was implemented with the MATLAB program, with three sets of three consecutive vehicles.
4. Simulation Results and Key Findings
When cooperative platooning is considered, the string stability is measured based on the number of speed overshoot events. This refers to the ability of an ego vehicle to smoothly follow its preceding vehicle without exceeding its speed. As noted, a desired time headway of 1.5 s is used in this evaluation to ensure safety, even during a field operation test. However, in the NGSIM data, human drivers do not necessarily maintain this time headway.
As shown in Figure 2, ACC resulted in five speed overshoot events for the ego vehicle, while CACCu resulted in zero overshoot events. This indicates that CACCu significantly improves ride comfort by maintaining string stability.
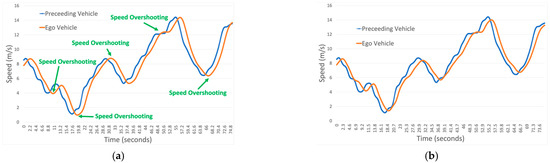
Figure 2.
String stability evaluations using speed overshoot events. (a) ACC mode. (b) CACCu mode.
In addition to the overshooting speed events, safety was assessed using the time-to-collision (TTC) and spacing errors. With the desired time headway of 1.5 s, the TTC values are always higher than a safety concern. Thus, the spacing errors are considered for safety assessment. As shown in Figure 3, the spacing error distribution under ACC has far greater variability, often being higher than 3 m. On the other hand, CACCu shows a much tighter distribution, indicating a lesser likelihood of crashes. The spacing errors from the other two trajectories show similar trends.
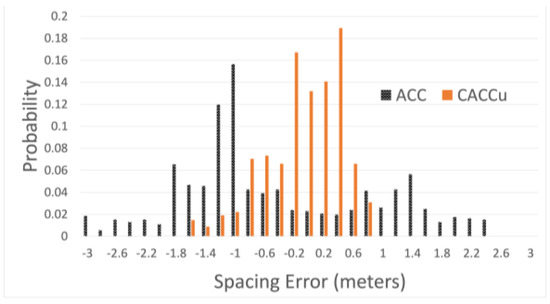
Figure 3.
Spacing error histogram of ACC and CACCu.
5. Conclusions and Future Research
In this paper, the safety impacts of cooperative platooning in mixed traffic were assessed using spacing errors by comparing the performance of CACCu with that of ACC. The maximum spacing error was 1.6 m for CACCu, while results of up to 3 m were observed for ACC. The simulation results from this paper support the notion that CACCu, or cooperative platooning in mixed traffic, offers much safer control than the ACC. The results were consistent for three randomly selected real-world trajectories from the NGSIM.
Future research should consider the performance of field operation tests. It is recommended that additional simulations be performed using a vehicle-dynamics-based model, such as Carla or Carla-ROS. The latter would allow for the extension of a control algorithm to connected automated vehicles utilizing ROS.
Author Contributions
Conceptualization, B.B.P. and I.Y.; methodology and analysis, B.B.P.; writing—review and editing, B.B.P., I.Y., H.L. and J.P.; funding acquisition, B.B.P. and I.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Science Foundation under Grant No. CMMI-2009342 and the Korea Agency for Infrastructure Technology Advancement (KAIA) grant funded by the Ministry of Land, Infrastructure, and Transport (grant No. 22AMDP-C161752-02).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data used in this paper are from the NGSIM program.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Milanés, V.; Shladover, S.E.; Spring, J. Cooperative Adaptive Cruise Control in Real Traffic Situations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 296–305. [Google Scholar] [CrossRef]
- Liu, H.; Kan, X.; Shladover, S.E.; Lu, X.Y.; Ferlis, R.E. Modeling impacts of Cooperative Adaptive Cruise Control on mixed traffic flow in multi-lane freeway facilities. Transp. Res. Part C Emerg. Technol. 2018, 95, 261–279. [Google Scholar] [CrossRef]
- Lioris, J.; Pedarsani, R.; Tascikaraoglu, F.Y.; Varaiya, P. Platoons of connected vehicles can double throughput in urban roads. Transp. Res. Part C Emerg. Technol. 2017, 77, 292–305. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Ploeg, J.; Semsar-Kazerooni, E.; Lijster, G.; van de Wouw, N.; Nijmeijer, H. Graceful degradation of cooperative adaptive cruise control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 488–497. [Google Scholar] [CrossRef]
- Orosz, G. Connected cruise control: Modelling, delay effects, and nonlinear behaviour. Veh. Syst. Dyn. 2016, 54, 1147–1176. [Google Scholar] [CrossRef]
- Ge, J.I.; Orosz, G. Data-driven parameter estimation for optimal connected cruise control. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control, CDC 2017, Melbourne, VIC, Australia, 12–15 December 2017; Volume 2018, pp. 3739–3744. [Google Scholar]
- Ge, J.I.; Orosz, G. Connected cruise control among human-driven vehicles: Experiment-based parameter estimation and optimal control design. Transp. Res. Part C Emerg. Technol. 2018, 95, 445–459. [Google Scholar] [CrossRef]
- Chen, Z.; Park, B.B. Cooperative Adaptive Cruise Control with Unconnected Vehicle in the Loop. IEEE Trans. Intell. Transp. Syst. 2020, 23, 4176–4186. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S.; Chen, Z.; Park, B.B.; Shim, D.H. Design and field evaluation of cooperative adaptive cruise control with unconnected vehicle in the loop. Transp. Res. Part C Emerg. Technol. 2021, 132, 103364. [Google Scholar] [CrossRef]
- Cui, L.; Chen, Z.; Wang, A.; Hu, J.; Park, B.B. Development of a Robust Cooperative Adaptive Cruise Control with Dynamic Topology. IEEE Trans. Intell. Transp. Syst. 2021, 23, 4279–4290. [Google Scholar] [CrossRef]
- So, J.; Dedes, G.; Park, B.B.; Alamdary, S.H.; Grejner-Brzezinsk, D. Development and evaluation of an enhanced surrogate safety assessment framework. Transp. Res. Part C Emerg. Technol. 2015, 50, 51–67. [Google Scholar] [CrossRef]
- Park, B.; Chen, Y.; Hourdos, J. Opportunities for preventing rear-end crashes: Findings from the analysis of actual freeway crash data. J. Transp. Saf. Secur. 2011, 3, 95–107. [Google Scholar] [CrossRef]
- Alexiadis, V.; Colyar, J.; Halkias, J.; Hranac, R.; McHale, G. The next generation simulation program. ITE J. (Inst. Transp. Eng.) 2004, 74, 22–26. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).