
Combination Process of a Pneumatic Artificial Muscle and a Fiber Optical Sensor System †

 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
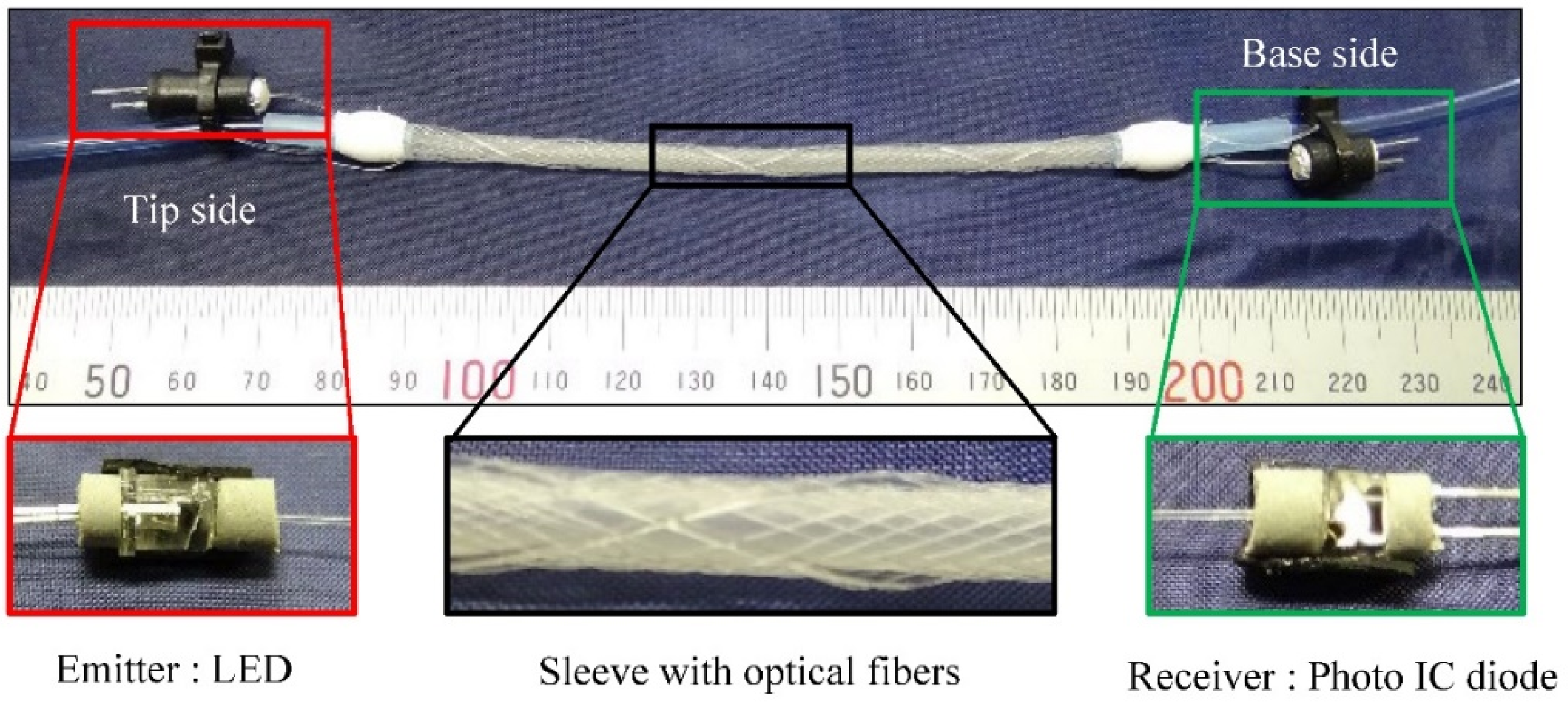
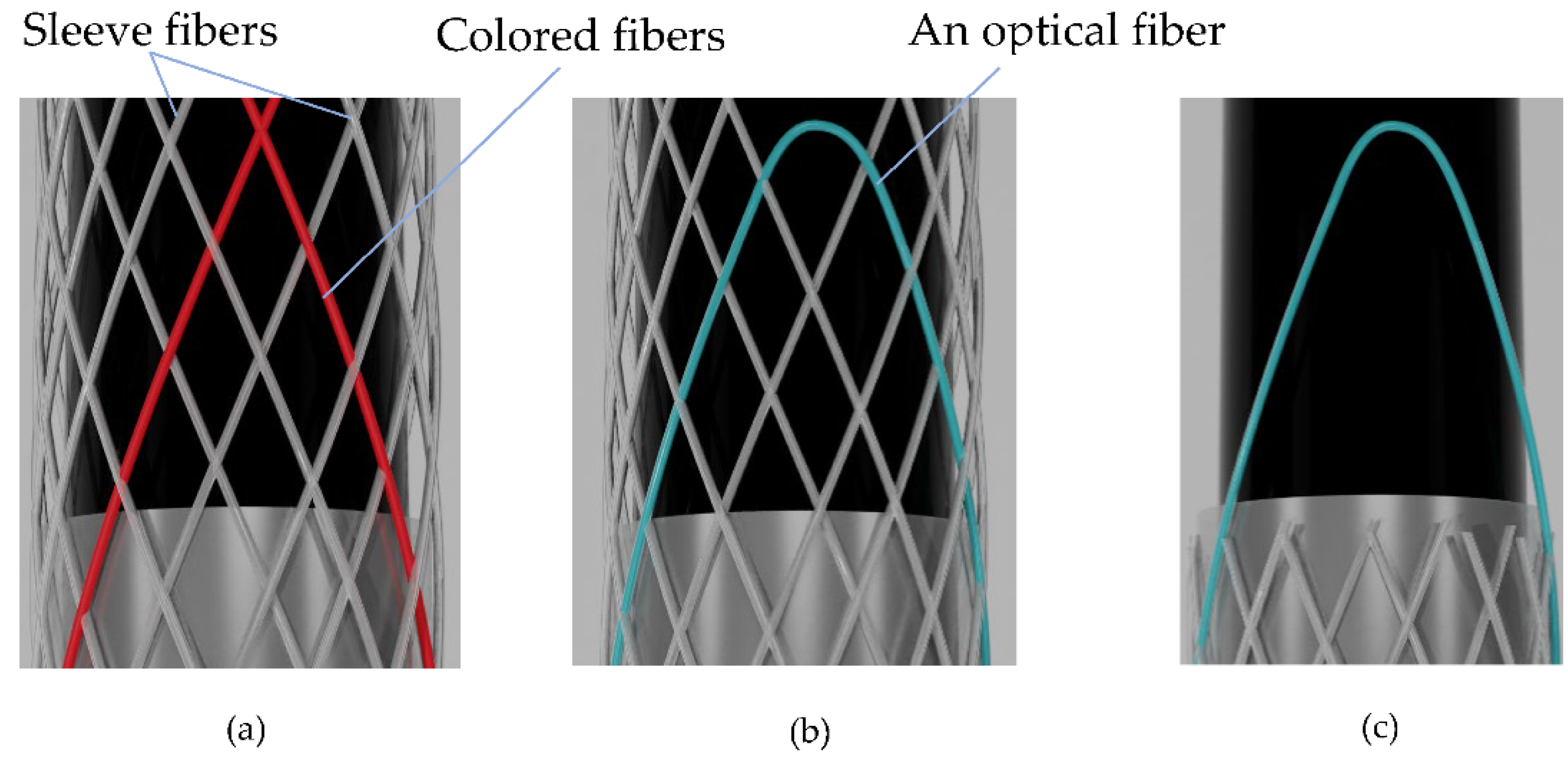
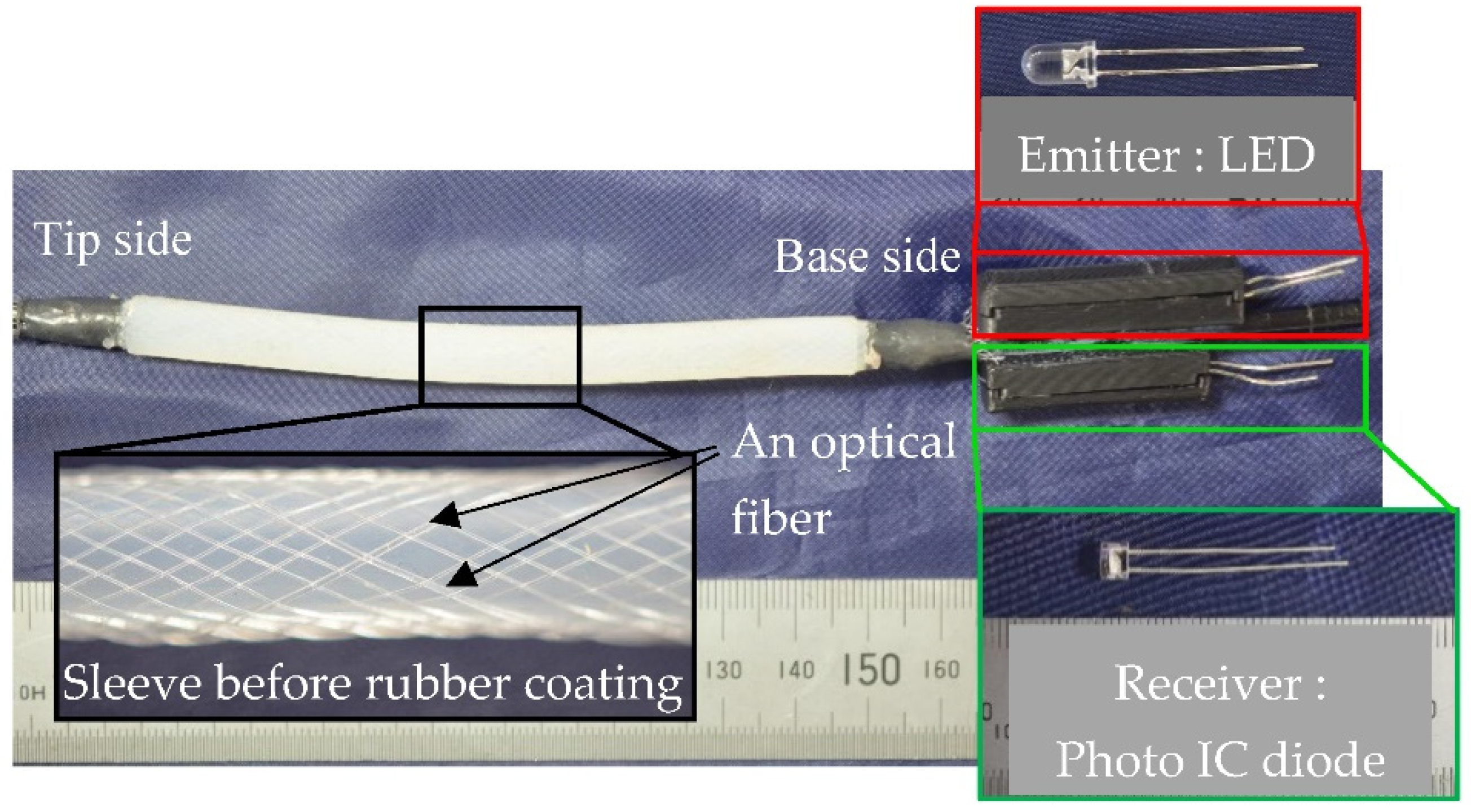
2.1. Improved Structure of the Artificial Muscle with the Optical Fiber
2.2. Production Method
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Felt, W.; Chin, K.Y.; Remy, C.D. Contraction Sensing with Smart Braid McKibben Muscles. IEEE ASME Trans. Mechatron. 2016, 3, 1201–1209. [Google Scholar] [CrossRef] [Green Version]
- Wakimoto, S.; Misumi, J.; Suzumori, K. New Concept and Fundamental Experiments of a Smart Pneumatic Artificial Muscle with a Conductive Fiber. Sens. Actuator A Phys. 2016, 250, 48–54. [Google Scholar] [CrossRef]
- Kogawa, S.; Wakimoto, S.; Kanda, T.; Omura, K.; Ando, K. Establishment of fabrication process for smart artificial muscles with the inductance sensor. J. Jpn. Fluid Power Syst. Soc. 2020, 51, 25–31. (In Japanese) [Google Scholar] [CrossRef]
- Kogawa, S.; Wakimoto, S.; Kanda, T.; Omura, K. Composite Structure of McKibben Artificial Muscle and Optical Fiber Sensor. In Proceedings of the International Workshop on Piezoelectric Materials and Applications in Actuators 2019 & ENHANCE Workshop, Lyon, France, 4 October 2019. [Google Scholar]
- Wakimoto, S.; Kogawa, S.; Kanda, T.; Matsuda, H.; Nagaoka, K. Design of Pneumatic Smart Artificial Muscle Considering Characteristics of Optical Fiber Sensor. In Proceedings of the Robotics and Mechatronics Conference, Kanazawa, Japan, 28 May 2020. (In Japanese). [Google Scholar] [CrossRef]
- Legrand, J.; Loenders, B.; Vos, A.; Schoevaerdts, L.; Poorten Vander, E. Integrated Capacitance Sensing for Miniature Artificial Muscle Actuators. IEEE Sens. J. 2020, 3, 1363–1372. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoshimoto, Y.; Wakimoto, S.; Tian, W.; Inoue, K.; Yamaguchi, D.; Kanda, T. Combination Process of a Pneumatic Artificial Muscle and a Fiber Optical Sensor System. Eng. Proc. 2022, 27, 86. https://doi.org/10.3390/ecsa-9-13290
Yoshimoto Y, Wakimoto S, Tian W, Inoue K, Yamaguchi D, Kanda T. Combination Process of a Pneumatic Artificial Muscle and a Fiber Optical Sensor System. Engineering Proceedings. 2022; 27(1):86. https://doi.org/10.3390/ecsa-9-13290
Chicago/Turabian StyleYoshimoto, Yorifumi, Shuichi Wakimoto, Weihang Tian, Keima Inoue, Daisuke Yamaguchi, and Takefumi Kanda. 2022. "Combination Process of a Pneumatic Artificial Muscle and a Fiber Optical Sensor System" Engineering Proceedings 27, no. 1: 86. https://doi.org/10.3390/ecsa-9-13290
APA StyleYoshimoto, Y., Wakimoto, S., Tian, W., Inoue, K., Yamaguchi, D., & Kanda, T. (2022). Combination Process of a Pneumatic Artificial Muscle and a Fiber Optical Sensor System. Engineering Proceedings, 27(1), 86. https://doi.org/10.3390/ecsa-9-13290