
A Microfluidic Device Based on Standing Surface Acoustic Waves for Sorting and Trapping Microparticles †


 and
and 
Abstract
1. Introduction
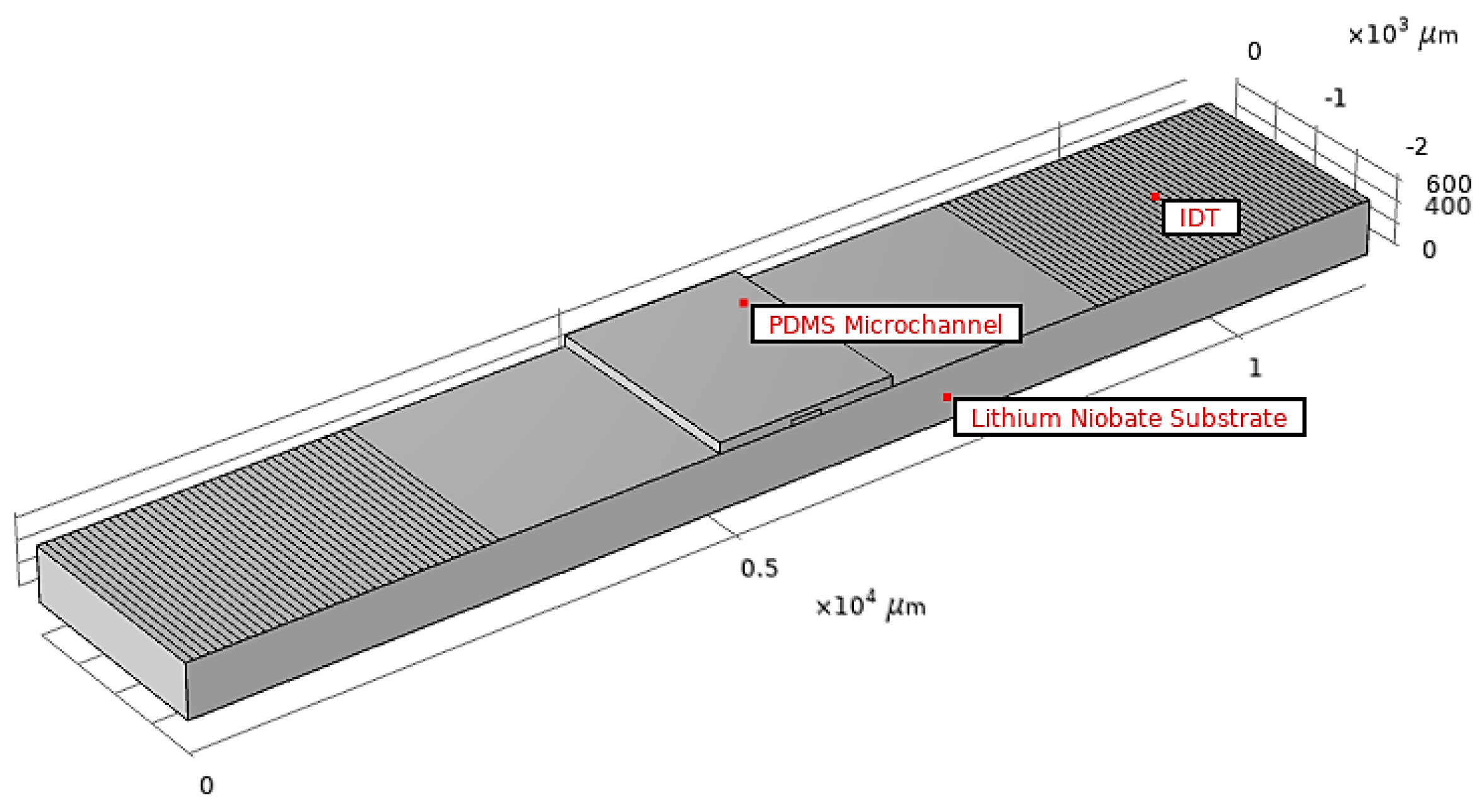
2. Numerical Model
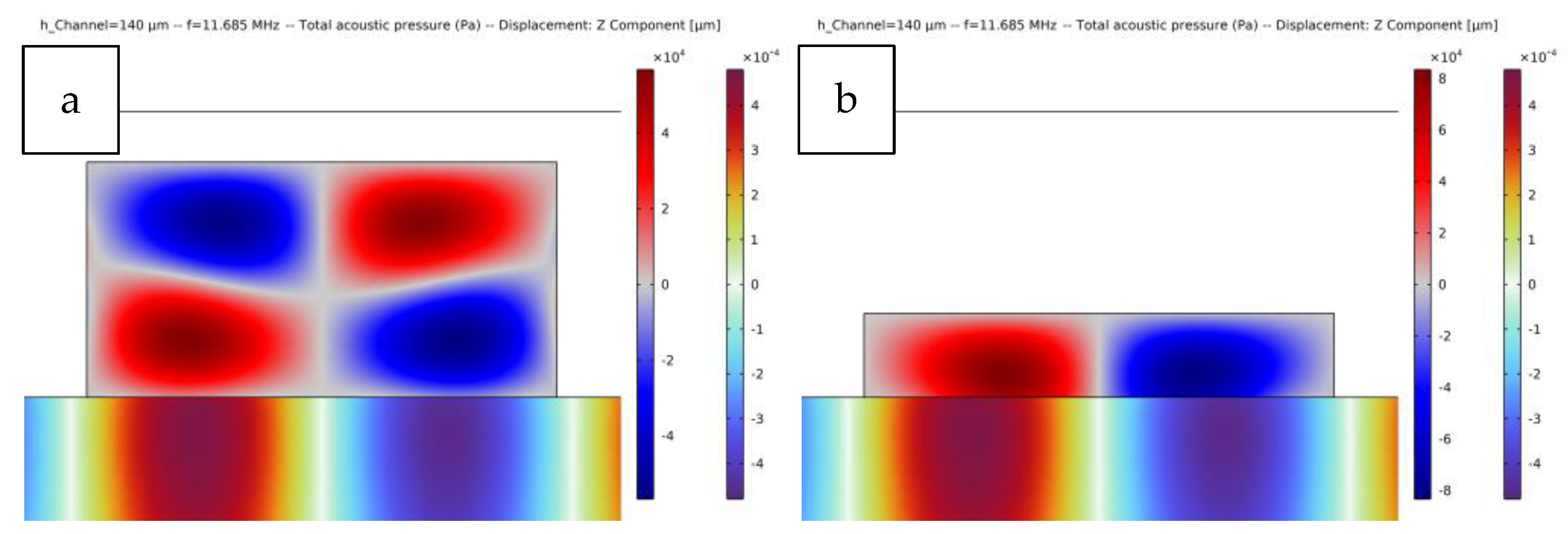
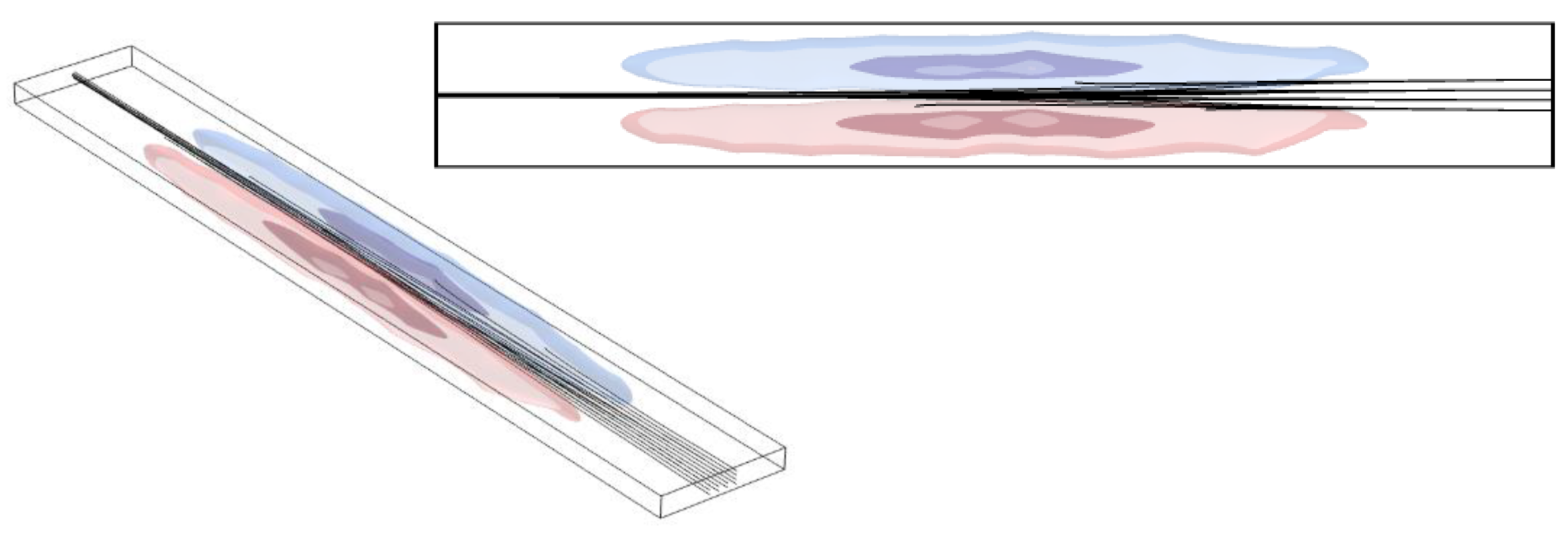
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Whitesides, G. The origins and the future of microfluidics. Nature 2006, 442, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Yilmaz, B.; Yilmaz, F. Lab-on-a-chip technology and its applications. In Omics Technology and Bio-Engineering, 1st ed.; Bahr, D., Azevedo, V., Eds.; Academic Press: Cambridge, MA, USA; Elsevier: Amsterdam, The Netherlands, 2018; Volume 1, pp. 145–153. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Shaegh, S.A.M.; Kashaninejad, N.; Phan, D.T. Design, fabrication and characterization of drug delivery system based on lab-on-a-chip technology. Adv. Drug Deliv. Rev. 2013, 65, 1403–1419. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; Onck, P.; den Toonder, J. A concise review of microfluidic particle manipulation methods. Microfluid. Nanofluid 2020, 24, 24. [Google Scholar] [CrossRef]
- Pamme, N. Continuous flow separations in microfluidic devices. Lab Chip 2007, 7, 1644–1659. [Google Scholar] [CrossRef] [PubMed]
- Lenshof, A.; Laurell, T. Continuous separation of cells and particles in microfluidic systems. Chem. Soc. Rev. 2010, 39, 1203–1217. [Google Scholar] [CrossRef] [PubMed]
- Gossett, D.R.; Weaver, W.M.; Mach, A.J.; Hur, S.C.; Tse, H.T.K.; Lee, W.; Amini, H.; Di Carlo, D. Label-free cell separation and sorting in microfluidic systems. Anal. Bioanal. Chem. 2010, 397, 3249–3267. [Google Scholar] [CrossRef] [PubMed]
- Çetin, B.; Özer, M.B.; Solmaz, M.E. Microfluidic bio-particle manipulation for biotechnology. Biochem. Eng. J. 2014, 92, 63–82. [Google Scholar] [CrossRef]
- Lenshof, A.; Magnusson, C.; Laurell, T. Acoustofluidics 8: Applications of acoustophoresis in continuous flow microsystems. Lab Chip 2012, 12, 1210. [Google Scholar] [CrossRef] [PubMed]
- Laurell, T.; Petersson, F.; Nilsson, A. Chip integrated strategies for acoustic separation and manipulation of cells and particles. Chem. Soc. Rev. 2007, 36, 492–506. [Google Scholar] [CrossRef] [PubMed]
- Ding, X.; Li, P.; Lin, S.S.; Stratton, Z.S.; Nama, N.; Guo, F.; Slotcavage, D.; Mao, X.; Shi, J.; Costanzo, F.; et al. Surface acoustic wave microfluidics. Lab Chip 2013, 13, 3626–3649. [Google Scholar] [CrossRef] [PubMed]
- Bruus, H. Acoustofluidics 7: The acoustic radiation force on small particles. Lab Chip 2012, 12, 1014. [Google Scholar] [CrossRef] [PubMed]
- Guldiken, R.; Jo, M.C.; Gallant, N.D.; Demirci, U.; Zhe, J. Sheathless size-based acoustic particle separation. Sensors 2012, 12, 905–922. [Google Scholar] [CrossRef] [PubMed]
- Collins, D.; Morahan, B.; Garcia-Bustos, J.; Doering, C.; Plebanski, M.; Neild, A. Two-dimensional single-cell patterning with one cell per well driven by surface acoustic waves. Nat. Commun. 2015, 6, 8686. [Google Scholar] [CrossRef] [PubMed]
- Ding, X.; Lin, S.S.; Kiraly, B.; Yue, H.; Li, S.; Chiang, I.; Shi, J.; Benkovic, S.J.; Huang, T.J. On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2012, 109, 11105–11109. [Google Scholar] [CrossRef]
- Liu, H.; Ao, Z.; Cai, B.; Shu, X.; Chen, K.; Rao, L.; Luo, C.; Wang, F.; Liu, W.; Bondesson, M.; et al. Size-amplified acoustofluidic separation of circulating tumor cells with removable microbeads. Nano Futures 2018, 2, 025004. [Google Scholar] [CrossRef]
- Guo, J.; Kang, Y.; Ai, Y. Radiation dominated acoustophoresis driven by surface acoustic waves. J. Colloid Interface Sci. 2015, 455, 203–211. [Google Scholar] [CrossRef] [PubMed]
- Gedge, M.; Hill, M. Acoustofluidics 17: Theory and applications of surface acoustic wave devices for particle manipulation. Lab Chip 2012, 12, 2998–3007. [Google Scholar] [CrossRef]
- Volpe, A.; Gaudiuso, C.; Ancona, A. Sorting of particles using inertial focusing and laminar vortex technology: A review. Micromachines 2019, 10, 594. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LiNbO3 Substrate | PDMS Channel | Water Domain | IDT Finger Electrode | |
|---|---|---|---|---|
| Width | 11,340 µm | 1650 µm | 280 µm | 70 µm |
| Thickness | 500 µm | 100 µm | 50 µm | 85 nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mezzanzanica, G.; Agazzi, L.; Siena, M.; Français, O.; Mariani, S. A Microfluidic Device Based on Standing Surface Acoustic Waves for Sorting and Trapping Microparticles. Eng. Proc. 2022, 27, 28. https://doi.org/10.3390/ecsa-9-13362
Mezzanzanica G, Agazzi L, Siena M, Français O, Mariani S. A Microfluidic Device Based on Standing Surface Acoustic Waves for Sorting and Trapping Microparticles. Engineering Proceedings. 2022; 27(1):28. https://doi.org/10.3390/ecsa-9-13362
Chicago/Turabian StyleMezzanzanica, Gianluca, Luigi Agazzi, Martina Siena, Olivier Français, and Stefano Mariani. 2022. "A Microfluidic Device Based on Standing Surface Acoustic Waves for Sorting and Trapping Microparticles" Engineering Proceedings 27, no. 1: 28. https://doi.org/10.3390/ecsa-9-13362
APA StyleMezzanzanica, G., Agazzi, L., Siena, M., Français, O., & Mariani, S. (2022). A Microfluidic Device Based on Standing Surface Acoustic Waves for Sorting and Trapping Microparticles. Engineering Proceedings, 27(1), 28. https://doi.org/10.3390/ecsa-9-13362