
Studying the Influence of the Impact Gap Value on the Average Translational Speed of the Wheeled Vibration-Driven Robot †





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
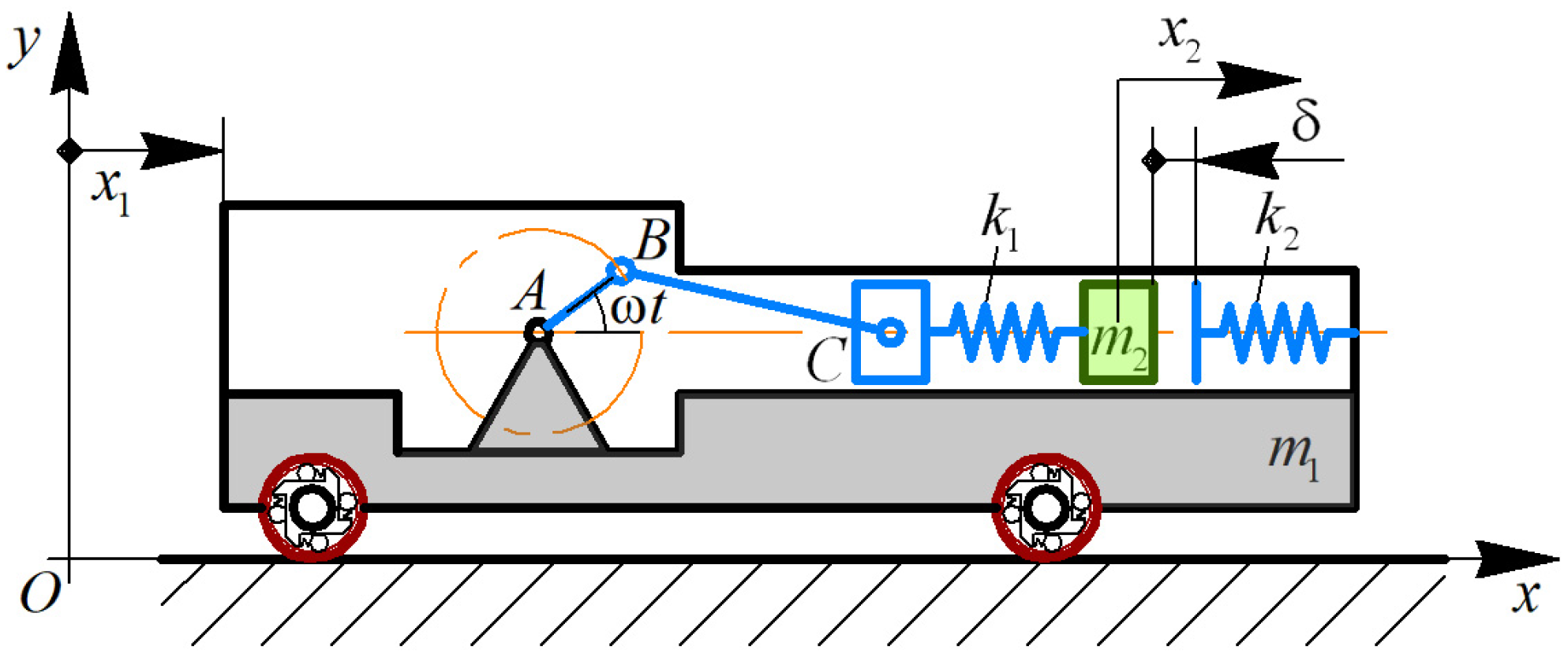
2.1. Simplified Kinematic Diagram and Mathematical Model of the Robot
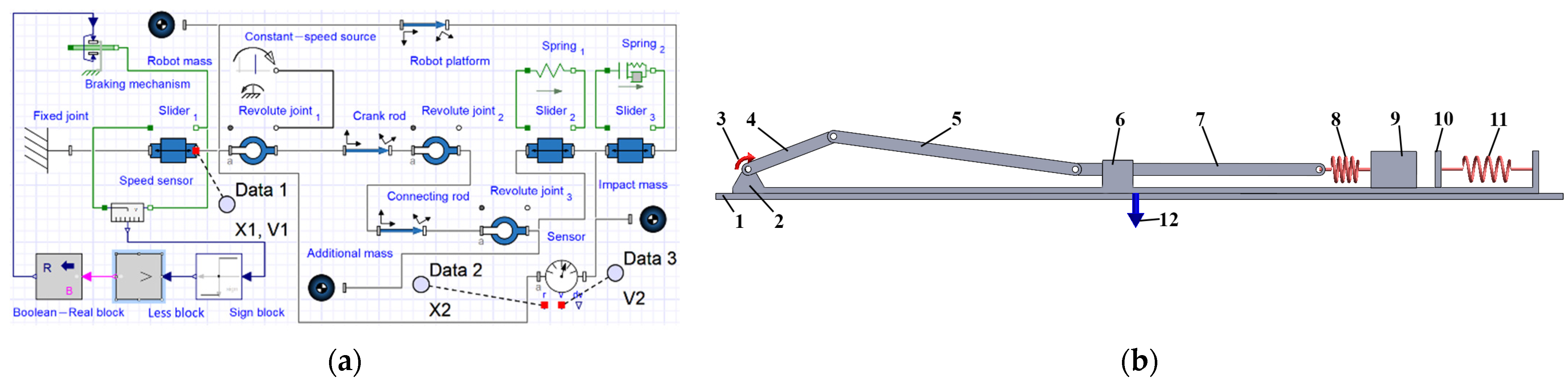
2.2. Simulation Models of the Robot’s Oscillatory System
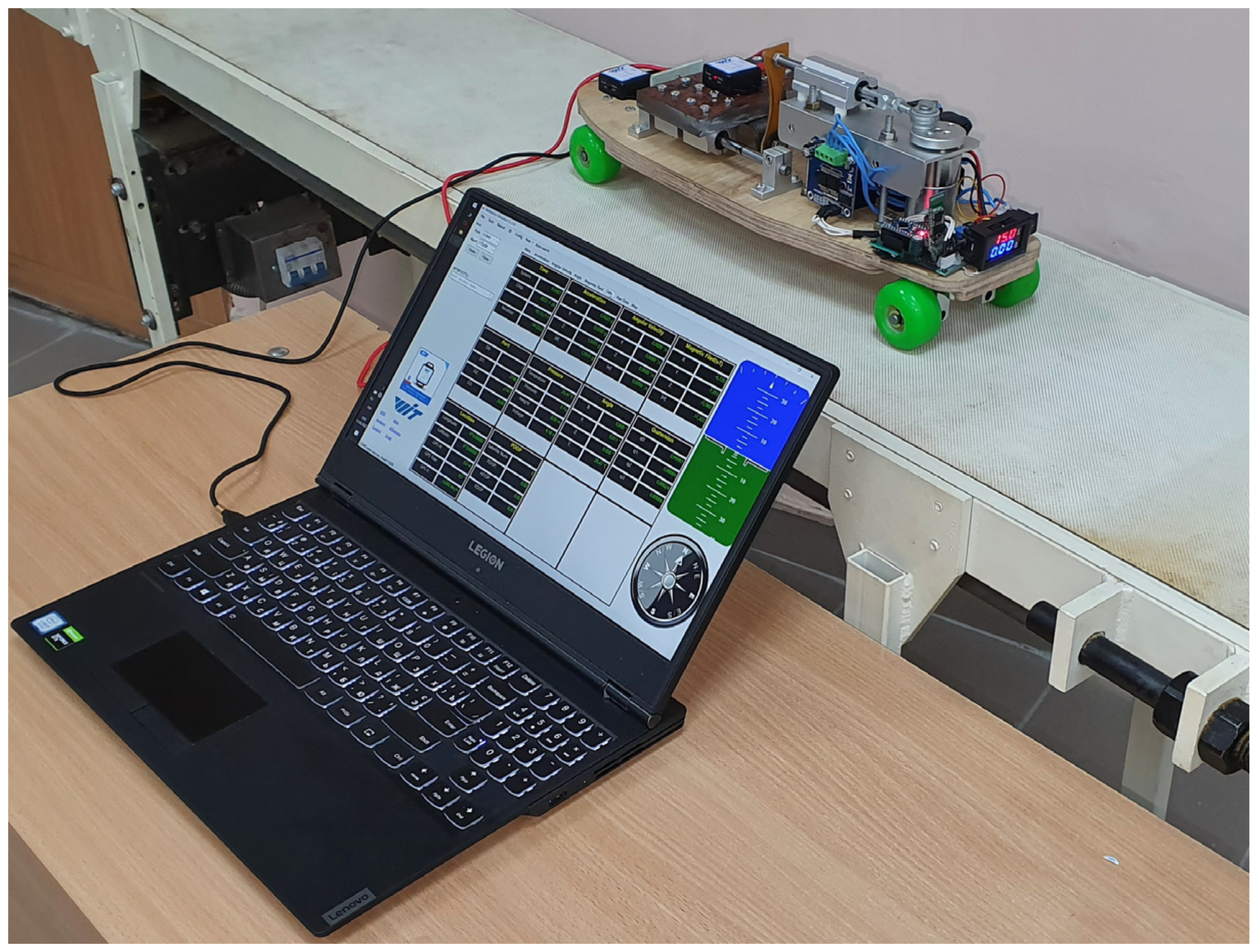
2.3. Experimental Prototype of the Wheeled Vibration-Driven Robot
3. Results and Discussion
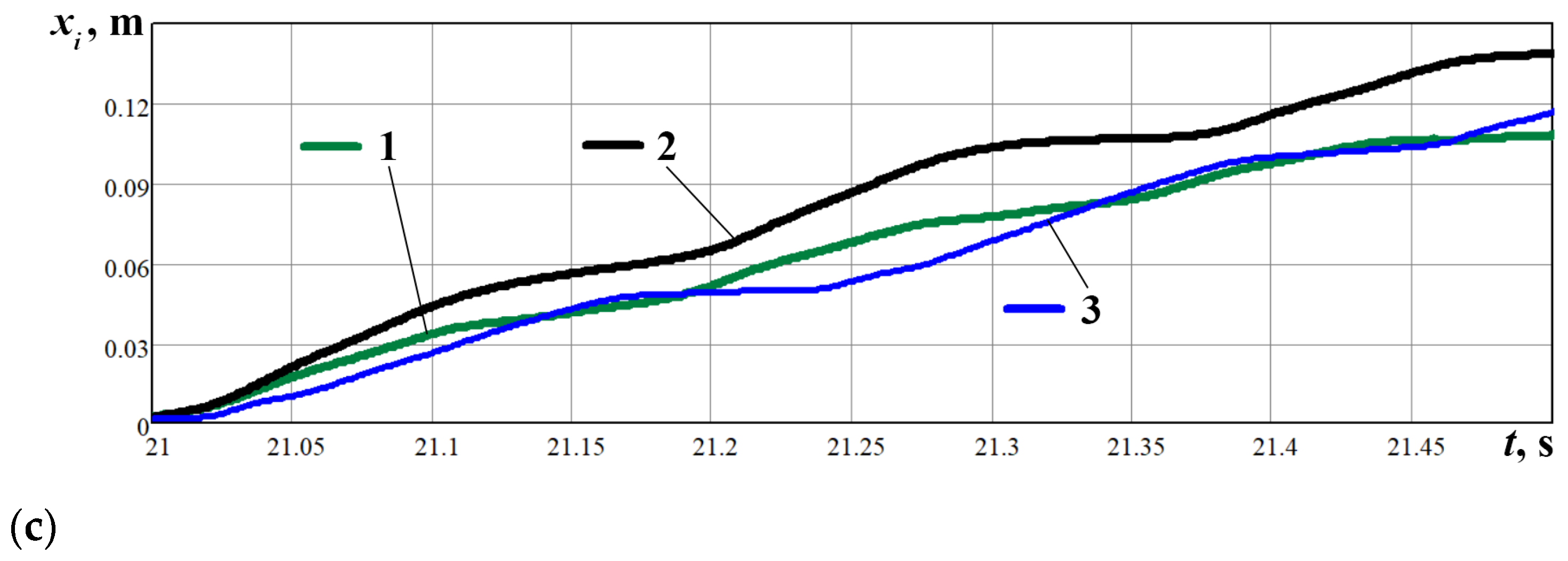
3.1. Results of Numerical Modeling and Computer Simulation
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yan, Y.; Liu, Y.; Liao, M. A Comparative Study of the Vibro-Impact Capsule Systems with One-Sided and Two-Sided Constraints. Nonlinear Dyn. 2017, 89, 1063–1087. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Liu, Y.; Manfredi, L.; Prasad, S. Modelling of a Vibro-Impact Self-Propelled Capsule in the Small Intestine. Nonlinear Dyn. 2019, 96, 123–144. [Google Scholar] [CrossRef]
- Maolin, L.; Yao, Y.; Yang, L. Optimization of the Vibro-Impact Capsule System for Promoting Progression Speed. MATEC Web Conf. 2018, 148, 10002. [Google Scholar] [CrossRef][Green Version]
- Guo, B.; Liu, Y.; Prasad, S. Modelling of Capsule–Intestine Contact for a Self-Propelled Capsule Robot via Experimental and Numerical Investigation. Nonlinear Dyn. 2019, 98, 3155–3167. [Google Scholar] [CrossRef]
- Guo, B.; Ley, E.; Tian, J.; Zhang, J.; Liu, Y.; Prasad, S. Experimental and Numerical Studies of Intestinal Frictions for Propulsive Force Optimisation of a Vibro-Impact Capsule System. Nonlinear Dyn. 2020, 101, 65–83. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Nguyen, V.D.; Ho, K.T.; La, N.T. Modelling of a Vibration-Driven Module for Capsule Locomotion Systems. Int. J. Mech. Prod. Eng. Res. Dev. 2020, 10, 837–850. [Google Scholar] [CrossRef]
- Nguyen, K.-T.; La, N.-T.; Ho, K.-T.; Ngo, Q.-H.; Chu, N.-H.; Nguyen, V.-D. The Effect of Friction on the Vibro-Impact Locomotion System: Modeling and Dynamic Response. Meccanica 2021, 56, 2121–2137. [Google Scholar] [CrossRef]
- La, N.-T.; Nguyen, T.-T.; Nguyen, V.-D. A Comparative Study on the Two Vibration Driven Locomotion Systems in Various Friction Levels. Vietnam J. Mech. 2021, 43, 121–137. [Google Scholar] [CrossRef]
- Zhu, J.; Liao, M.; Zheng, Y.; Qi, S.; Li, Z.; Zeng, Z. Multi-Objective Optimisation Based on Reliability Analysis of a Self-Propelled Capsule System. Available online: https://doi.org/10.1007/s11012-022-01519-3 (accessed on 14 September 2022).
- Duong, T.-H.; Van, C.N.; Ho, K.-T.; La, N.-T.; Ngo, Q.-H.; Nguyen, K.-T.; Hoang, T.-D.; Chu, N.-H.; Nguyen, V.-D. Dynamic Response of Vibro-Impact Capsule Moving on the Inclined Track and Stochastic Slope. Available online: https://doi.org/10.1007/s11012-022-01521-9 (accessed on 14 September 2022).
- Liao, M.; Zhang, J.; Liu, Y.; Zhu, D. Speed Optimisation and Reliability Analysis of a Self-Propelled Capsule Robot Moving in an Uncertain Frictional Environment. Int. J. Mech. Sci. 2022, 221, 107156. [Google Scholar] [CrossRef]
- Verma, A.; Kaiwart, A.; Dubey, N.D.; Naseer, F.; Pradhan, S. A Review on Various Types of In-Pipe Inspection Robot. Mater. Today Proc. 2021, 50, 1425–1434. [Google Scholar] [CrossRef]
- Jang, H.; Kim, T.Y.; Lee, Y.C.; Kim, Y.S.; Kim, J.; Lee, H.Y.; Choi, H.R. A Review: Technological Trends and Development Direction of Pipeline Robot Systems. J. Intell. Robot. Syst. 2022, 105, 59. [Google Scholar] [CrossRef]
- Nayak, A.; Pradhan, S.K. Design of a New In-Pipe Inspection Robot. Procedia Eng. 2014, 97, 2081–2091. [Google Scholar] [CrossRef]
- Feng, G.; Li, W.; Li, Z.; He, Z. Development of a Wheeled and Wall-Pressing Type in-Pipe Robot for Water Pipelines Cleaning and Its Traveling Capability. Mechanika 2020, 26, 134–145. [Google Scholar] [CrossRef]
- Salvatore, M.M.; Galloro, A.; Muzzi, L.; Pullano, G.; Odry, P.; Carbone, G. Design of PEIS: A Low-Cost Pipe Inspector Robot. Robotics 2021, 10, 74. [Google Scholar] [CrossRef]
- Liu, D.; Lu, J.; Cao, Y.; Jin, X. Dynamic Characteristics of Two-Mass Impact Pipeline Robot Driven by Non-Circular Gears. Adv. Mech. Eng. 2022, 14, 1–13. [Google Scholar] [CrossRef]
- Loukanov, I.A.; Vitliemov, V.G.; Ivanov, I.V. Dynamics of a Vibration-Driven One-Way Moving Wheeled Robot. IOSR J. Mech. Civ. Eng. 2016, 13, 14–22. [Google Scholar] [CrossRef]
- Loukanov, I.A.; Vitliemov, V.G.; Ivanov, I.V. Dynamics of a Mobile Mechanical System with Vibration Propulsion (VibroBot). Int. J. Res. Eng. Sci. 2016, 4, 44–51. [Google Scholar]
- Korendiy, V.; Gursky, V.; Kachur, O.; Dmyterko, P.; Kotsiumbas, O.; Havrylchenko, O. Mathematical Model and Motion Analysis of a Wheeled Vibro-Impact Locomotion System. Vibroeng. Procedia 2022, 41, 77–83. [Google Scholar] [CrossRef]
- Korendiy, V.; Kachur, O.; Gursky, V.; Kotsiumbas, O.; Dmyterko, P.; Nikipchuk, S.; Danylo, Y. Motion Simulation and Impact Gap Verification of a Wheeled Vibration-Driven Robot for Pipelines Inspection. Vibroeng. Procedia 2022, 41, 22521. [Google Scholar] [CrossRef]
- Korendiy, V.; Kachur, O.; Gursky, V.; Gurey, V.; Pelio, R.; Kotsiumbas, O. Experimental Investigation of Kinematic Characteristics of a Wheeled Vibration-Driven Robot. Vibroeng. Procedia 2022, 43, 14–20. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korendiy, V.; Kachur, O.; Gurskyi, V.; Krot, P. Studying the Influence of the Impact Gap Value on the Average Translational Speed of the Wheeled Vibration-Driven Robot. Eng. Proc. 2022, 24, 25. https://doi.org/10.3390/IECMA2022-12897
Korendiy V, Kachur O, Gurskyi V, Krot P. Studying the Influence of the Impact Gap Value on the Average Translational Speed of the Wheeled Vibration-Driven Robot. Engineering Proceedings. 2022; 24(1):25. https://doi.org/10.3390/IECMA2022-12897
Chicago/Turabian StyleKorendiy, Vitaliy, Oleksandr Kachur, Volodymyr Gurskyi, and Pavlo Krot. 2022. "Studying the Influence of the Impact Gap Value on the Average Translational Speed of the Wheeled Vibration-Driven Robot" Engineering Proceedings 24, no. 1: 25. https://doi.org/10.3390/IECMA2022-12897
APA StyleKorendiy, V., Kachur, O., Gurskyi, V., & Krot, P. (2022). Studying the Influence of the Impact Gap Value on the Average Translational Speed of the Wheeled Vibration-Driven Robot. Engineering Proceedings, 24(1), 25. https://doi.org/10.3390/IECMA2022-12897