Characterization of Hand Gestures by a Smartphone-Based Optical Fiber Force Myography Sensor †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
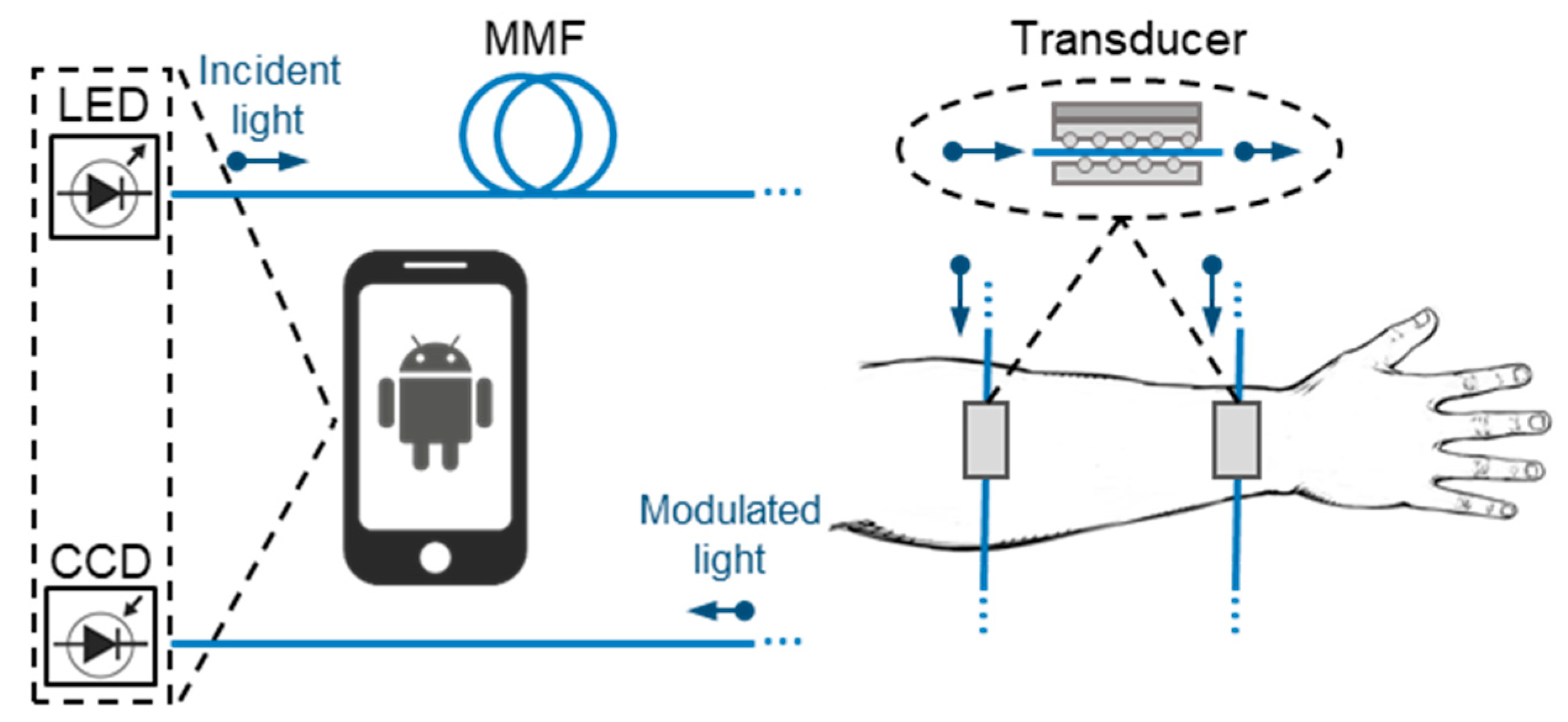
2.1. Experimental Setup
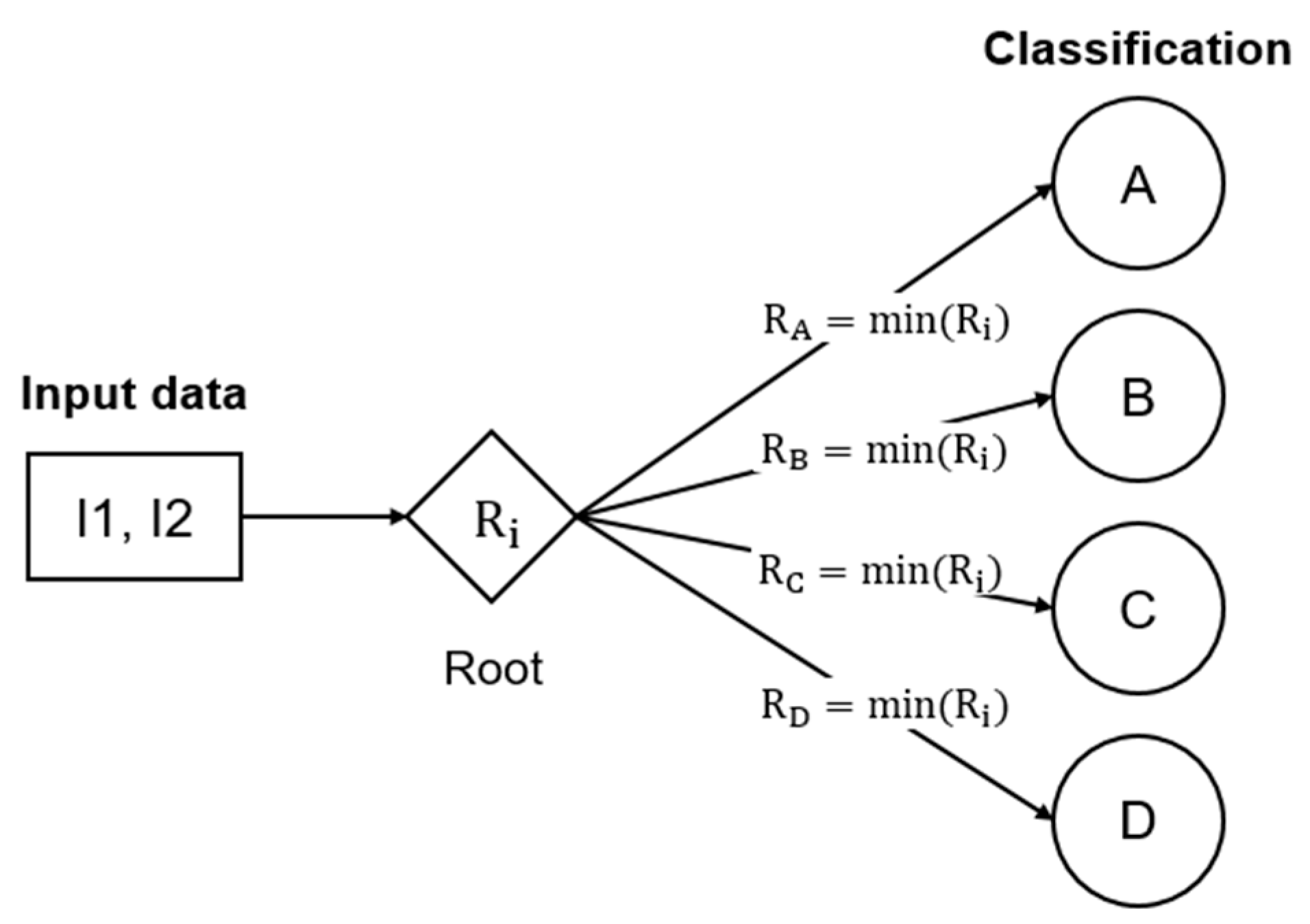
2.2. Application and Pattern Recognition
3. Results
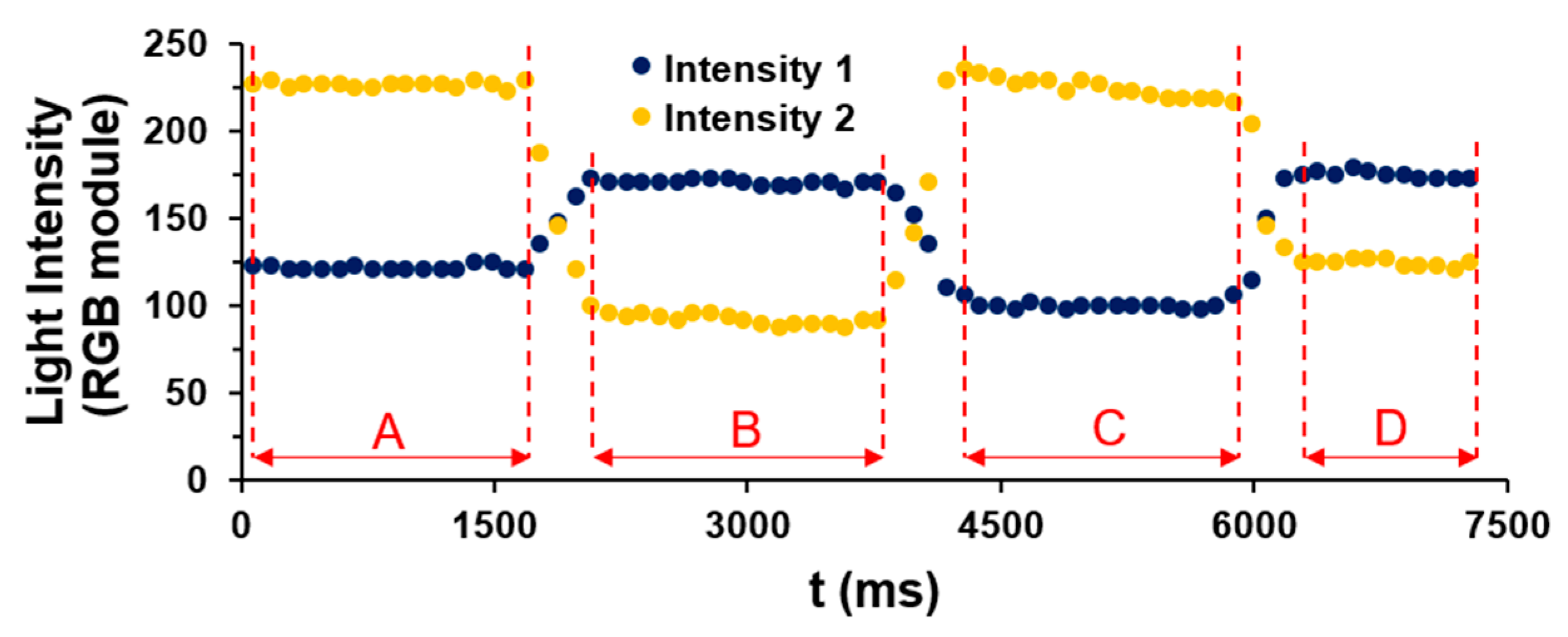
3.1. Measurement of FMG signals
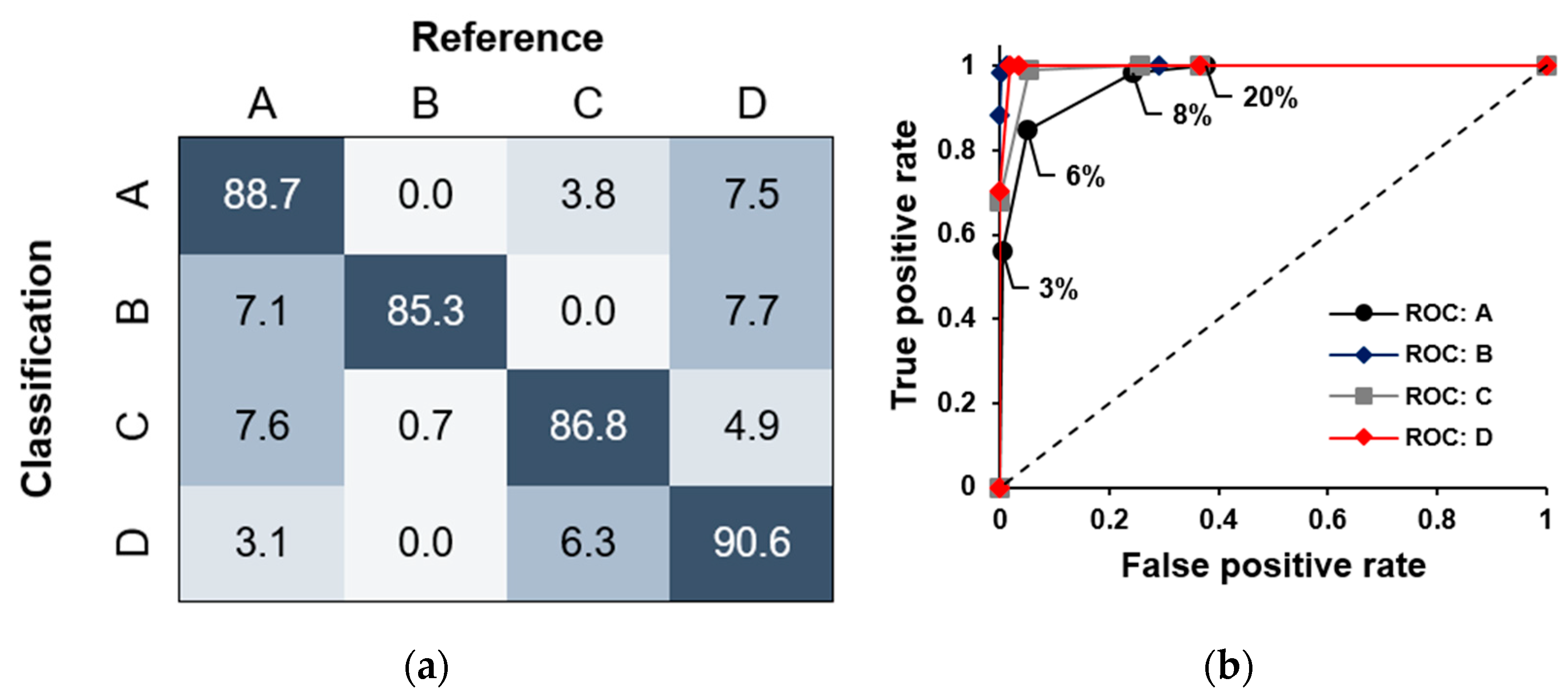
3.2. Gesture Classification
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- DiPietro, L.; Sabatini, A.M.; Dario, P. A Survey of Glove-Based Systems and Their Applications. IEEE Trans. Syst. Man, Cybern. Part C Appl. Rev. 2008, 38, 461–482. [Google Scholar] [CrossRef]
- Chowdhury, R.H.; Reaz, M.B.I.; Ali, M.A.B.M.; Bakar, A.A.A.; Chellappan, K.; Chang, T.G. Surface Electromyography Signal Processing and Classification Techniques. Sensors 2013, 13, 12431–12466. [Google Scholar] [CrossRef] [PubMed]
- Craelius, W. The Bionic Man: Restoring Mobility. Sci. 2002, 295, 1018–1021. [Google Scholar] [CrossRef] [PubMed]
- Boechat, A.A.; Su, D.; Hall, D.R.; Jones, J.D. Bend loss in large core multimode optical fiber beam delivery systems. Appl. Opt. 1991, 30, 321–327. [Google Scholar] [CrossRef] [PubMed]
- Fujiwara, E.; Wu, Y.T.; Santos, M.F.M.; Schenkel, E.A.; Suzuki, C.K. Optical Fiber Specklegram Sensor for Measurement of Force Myography Signals. IEEE Sens. J. 2016, 17, 951–958. [Google Scholar] [CrossRef]
- Fujiwara, E.; Suzuki, C.K. Optical Fiber Force Myography Sensor for Identification of Hand Postures. J. Sens. 2018, 2018, 8940373. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Q.; Chen, S.; Cheng, F.; Wang, H.; Peng, W. Surface Plasmon Resonance Biosensor Based on Smart Phone Platforms. Sci. Rep. 2015, 5, 12864. [Google Scholar] [CrossRef]
- Sun, A.; Venkatesh, A.G.; Hall, D.A. A Multi-Technique Reconfigurable Electrochemical Biosensor: Enabling Personal Health Monitoring in Mobile Devices. IEEE Trans. Biomed. Circuits Syst. 2016, 10, 945–954. [Google Scholar] [CrossRef] [PubMed]
- Kong, Q.; Allen, R.M.; Kohler, M.D.; Heaton, T.H.; Bunn, J. Structural Health Monitoring of Buildings Using Smartphone Sensors. Seism. Res. Lett. 2018, 89, 594–602. [Google Scholar] [CrossRef]
- Aagaard, P.; Simonsen, E.B.; Beyer, N.; Larsson, B.; Magnusson, P.; Kjaer, M. Sokinetic muscle strength and capacity for muscular knee joint stabilization in elite sailors. Int. J. Sports Med. 1997, 18, 521–525. [Google Scholar] [CrossRef] [PubMed]
- Hayes, K.W.; Falconer, J. Differential muscle strength decline in osteoarthritis of the knee. A developing hypothesis. Arthritis Rheum. 1992, 5, 24–28. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.T.; Gomes, M.K.; Da Silva, W.H.; Lazari, P.M.; Fujiwara, E. Integrated Optical Fiber Force Myography Sensor as Pervasive Predictor of Hand Postures. Biomed. Eng. Comput. Biol. 2020, 11. [Google Scholar] [CrossRef] [PubMed]
- Safavian, S.; Landgrebe, D. A survey of decision tree classifier methodology. IEEE Trans. Syst. Man, Cybern. 1991, 21, 660–674. [Google Scholar] [CrossRef]
- Brown, S.; Vranesic, Z. Fundamentals of Digital Logic with Verilog Design, 2nd ed.; Mc Graw Hill:: New York, NY, USA,, 2003; pp. 447–463. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodrigues, M.S.; Lazari, P.M.; Soares, M.C.P.; Fujiwara, E. Characterization of Hand Gestures by a Smartphone-Based Optical Fiber Force Myography Sensor. Eng. Proc. 2020, 2, 46. https://doi.org/10.3390/ecsa-7-08178
Rodrigues MS, Lazari PM, Soares MCP, Fujiwara E. Characterization of Hand Gestures by a Smartphone-Based Optical Fiber Force Myography Sensor. Engineering Proceedings. 2020; 2(1):46. https://doi.org/10.3390/ecsa-7-08178
Chicago/Turabian StyleRodrigues, Matheus S., Pedro M. Lazari, Marco C. P. Soares, and Eric Fujiwara. 2020. "Characterization of Hand Gestures by a Smartphone-Based Optical Fiber Force Myography Sensor" Engineering Proceedings 2, no. 1: 46. https://doi.org/10.3390/ecsa-7-08178
APA StyleRodrigues, M. S., Lazari, P. M., Soares, M. C. P., & Fujiwara, E. (2020). Characterization of Hand Gestures by a Smartphone-Based Optical Fiber Force Myography Sensor. Engineering Proceedings, 2(1), 46. https://doi.org/10.3390/ecsa-7-08178