
Combination of Post-Processing Methods to Improve High-Resolution NWP Solar Irradiance Forecasts in French Guiana †



Abstract
:1. Introduction
2. Methodology
2.1. Model Output Statistics
2.1.1. Artificial Neural Network
2.1.2. Lorenz’s MOS
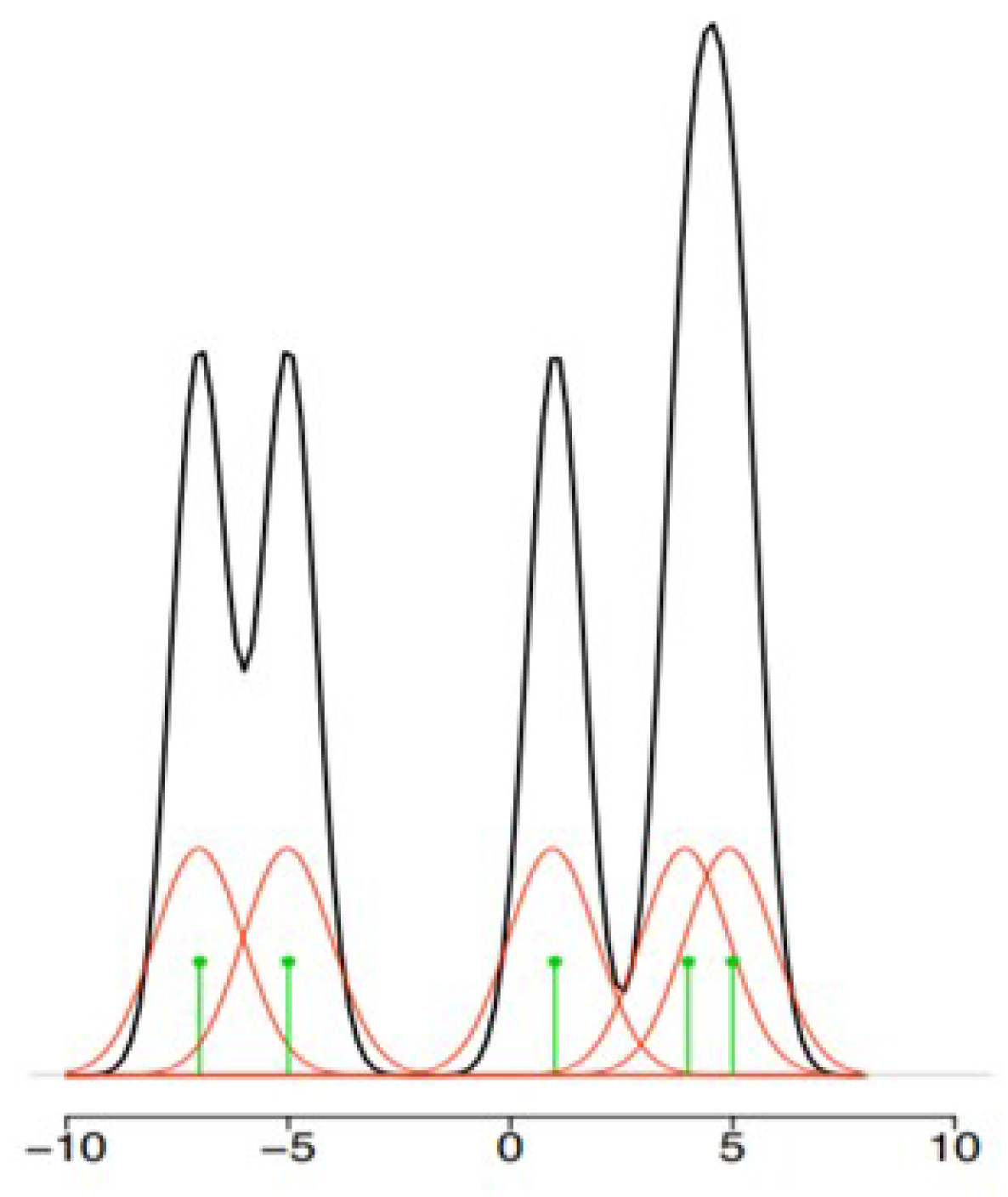
2.2. Kernel Conditional Density Estimation
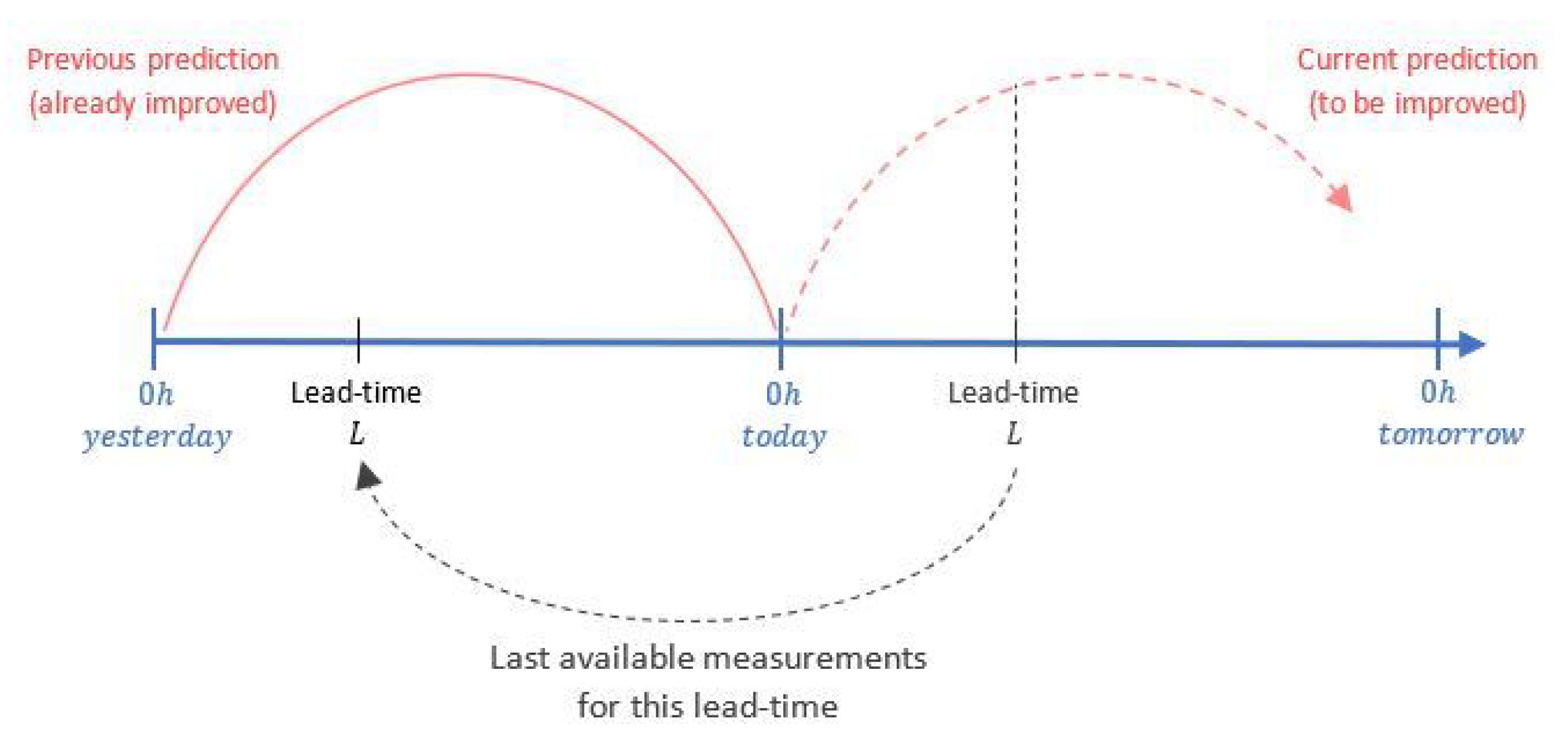
2.3. Kalman Filter
3. Data
3.1. Weather Forecasts
3.2. Observations
4. Results and Discussion
4.1. Modeling
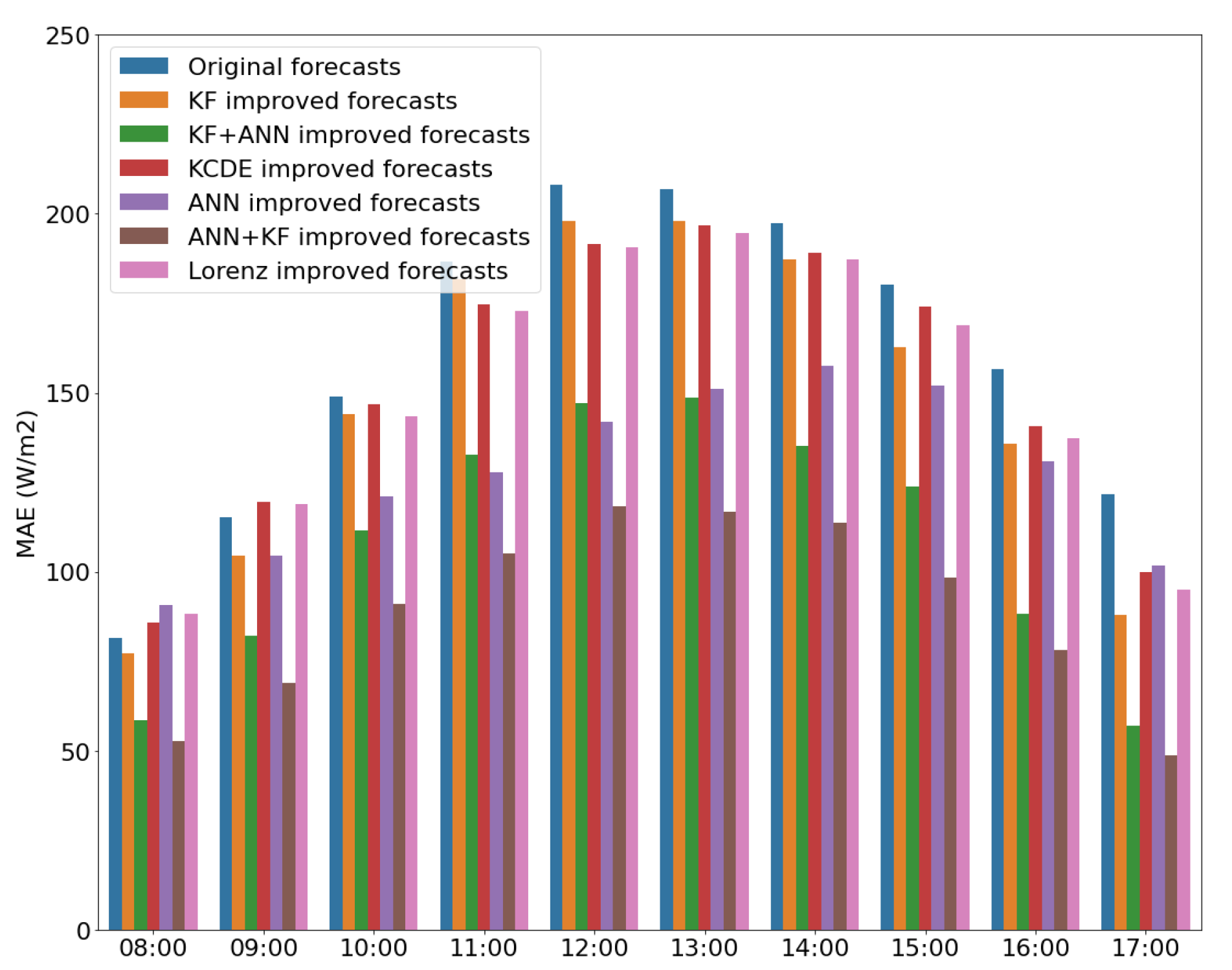
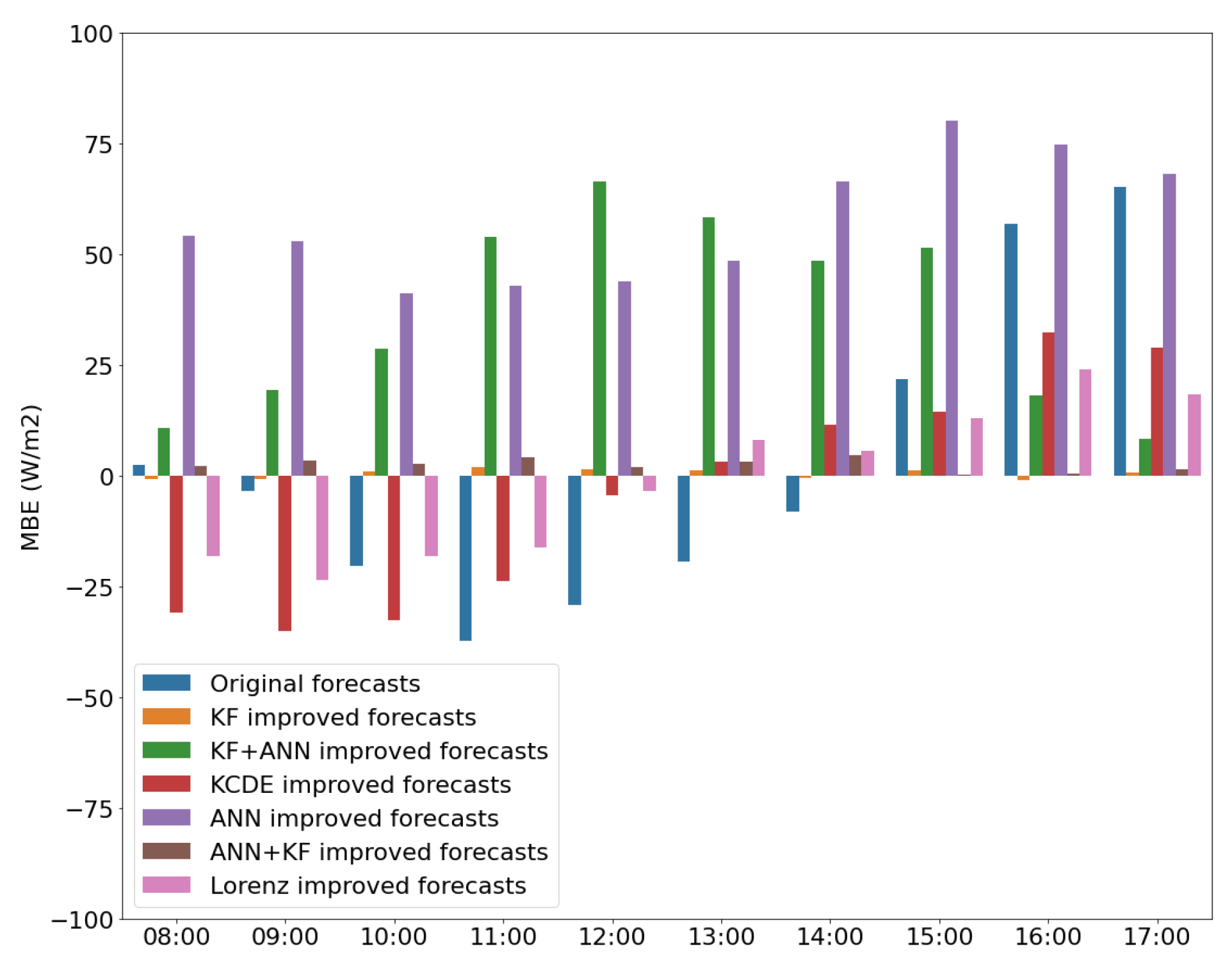
4.2. Improvements on Original Forecasts
5. Conclusions and Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, D. On post-processing day-ahead NWP forecasts using Kalman filtering. Sol. Energy 2019, 182, 179–181. [Google Scholar] [CrossRef]
- Lauret, P.; Diagne, M.; David, M. A Neural Network Post-processing Approach to Improving NWP Solar Radiation Forecasts. Energy Procedia 2014, 57, 1044–1052. [Google Scholar] [CrossRef]
- Pereira, S.; Canhoto, P.; Salgado, R.; Costa, M.J. Development of an ANN based corrective algorithm of the operational ECMWF global horizontal irradiation forecasts. Sol. Energy 2019, 185, 387–405. [Google Scholar] [CrossRef]
- Lima, F.J.L.; Pereira, E.B.; Martins, F.R. Forecast of Short-term Solar Irradiation in Brazil Using Numerical Models and Statistical Post-processing. In Proceedings of the EuroSun 2014 Conference, Aix-les-Bains, France, 16–19 September 2014; International Solar Energy Society: Freiburg, Germany, 2015; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Barutcu, B.; Tanriover, S.T.; Sakarya, S.; Incecik, S.; Sayinta, F.M.; Caliskan, E.; Kahraman, A.; Aksoy, B.; Kahya, C.; Topcu, S. Improving WRF GHI Forecasts with Model Output Statistics. In Progress in Clean Energy, Volume 1; Dincer, I., Colpan, C.O., Kizilkan, O., Ezan, M.A., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 291–299. [Google Scholar] [CrossRef]
- Diagne, M.; David, M.; Boland, J.; Schmutz, N.; Lauret, P. Post-processing of solar irradiance forecasts from WRF model at Reunion Island. Sol. Energy 2014, 105, 99–108. [Google Scholar] [CrossRef]
- Pelland, S.; Galanis, G.; Kallos, G. Solar and photovoltaic forecasting through post-processing of the Global Environmental Multiscale numerical weather prediction model: Solar and photovoltaic forecasting. Prog. Photovoltaics Res. Appl. 2013, 21, 284–296. [Google Scholar] [CrossRef]
- Rincón, A.; Jorba, O.; Baldasano, J.M.; Monache, L.D. Assessment of short-term irradiance forecasting based on post-processing tools applied on WRF meteorological simulations. In Proceedings of the State-of-the-Art Workshop, COST ES 1002: WIRE: Weather Intelligence for Renewable Energies, Paris, France, 22–23 March 2011; pp. 1–9. [Google Scholar]
- Sweeney, C.P.; Lynch, P.; Nolan, P. Reducing errors of wind speed forecasts by an optimal combination of post-processing methods: Comparing and combining post-processing methods. Meteorol. Appl. 2013, 20, 32–40. [Google Scholar] [CrossRef] [Green Version]
- Rincón, A.; Jorba, O.; Frutos, M.; Alvarez, L.; Barrios, F.P.; González, J.A. Bias correction of global irradiance modelled with weather and research forecasting model over Paraguay. Sol. Energy 2018, 170, 201–211. [Google Scholar] [CrossRef]
- Louka, P.; Galanis, G.; Siebert, N.; Kariniotakis, G.; Katsafados, P.; Pytharoulis, I.; Kallos, G. Improvements in wind speed forecasts for wind power prediction purposes using Kalman filtering. J. Wind. Eng. Ind. Aerodyn. 2008, 96, 2348–2362. [Google Scholar] [CrossRef] [Green Version]
- Lorenz, E.; Hurka, J.; Heinemann, D.; Beyer, H.G. Irradiance Forecasting for the Power Prediction of Grid-Connected Photovoltaic Systems. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2009, 2, 2–10. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter. Proc. Siggraph Course 2006, 8, 16. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resolution | ANN | Lorenz | KCDE | Kalman Filter |
|---|---|---|---|---|
| 10-min | Wind speed (x) Wind speed (y) Cloud-coverage Temperature Humidity | Cloud-coverage Sun zenith angle Pressure Temperature Wind speed (x) | Cloud-coverage Sun zenith angle Pressure | Cloud-coverage |
| Hourly | Wind speed (x) Wind speed (y) Cloud-coverage Temperature Humidity Sun zenith angle | Cloud-coverage Sun zenith angle Pressure Temperature Wind speed (x) | Cloud-coverage Sun zenith angle | Cloud-coverage |
| Method | MAE | RMSE | MBE |
|---|---|---|---|
| 22 | 12 | −95 | |
| 7 | 10 | 48 | |
| KF | 8 | 7 | 95 |
| KCDE | 6 | 9 | 27 |
| KF + | 32 | 17 | −31 |
| + KF | 45 | 41 | 91 |
| Method | MAE | RMSE | MBE |
|---|---|---|---|
| 37 | 36 | −49 | |
| 9 | 10 | 43 | |
| KF | 13 | 11 | 94 |
| KCDE | 11 | 12 | 21 |
| KF + | 54 | 50 | −7 |
| + KF | 13 | 11 | 95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alvarenga, R.; Herbaux, H.; Linguet, L. Combination of Post-Processing Methods to Improve High-Resolution NWP Solar Irradiance Forecasts in French Guiana. Eng. Proc. 2022, 18, 27. https://doi.org/10.3390/engproc2022018027
Alvarenga R, Herbaux H, Linguet L. Combination of Post-Processing Methods to Improve High-Resolution NWP Solar Irradiance Forecasts in French Guiana. Engineering Proceedings. 2022; 18(1):27. https://doi.org/10.3390/engproc2022018027
Chicago/Turabian StyleAlvarenga, Rafael, Hubert Herbaux, and Laurent Linguet. 2022. "Combination of Post-Processing Methods to Improve High-Resolution NWP Solar Irradiance Forecasts in French Guiana" Engineering Proceedings 18, no. 1: 27. https://doi.org/10.3390/engproc2022018027
APA StyleAlvarenga, R., Herbaux, H., & Linguet, L. (2022). Combination of Post-Processing Methods to Improve High-Resolution NWP Solar Irradiance Forecasts in French Guiana. Engineering Proceedings, 18(1), 27. https://doi.org/10.3390/engproc2022018027