
Textile Tactile Senor Based on Ferroelectret for Gesture Recognition †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
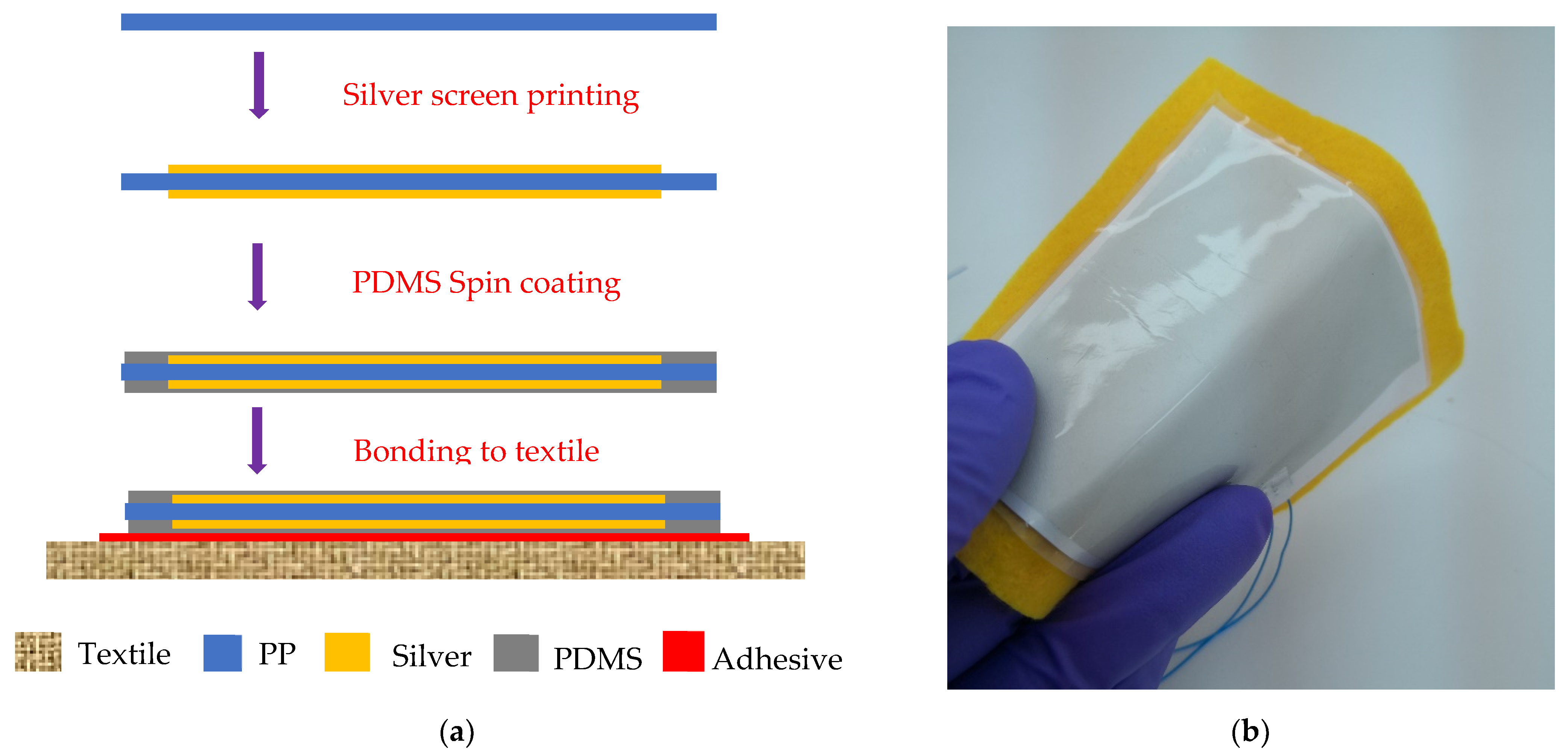
2. Sensor Fabrication
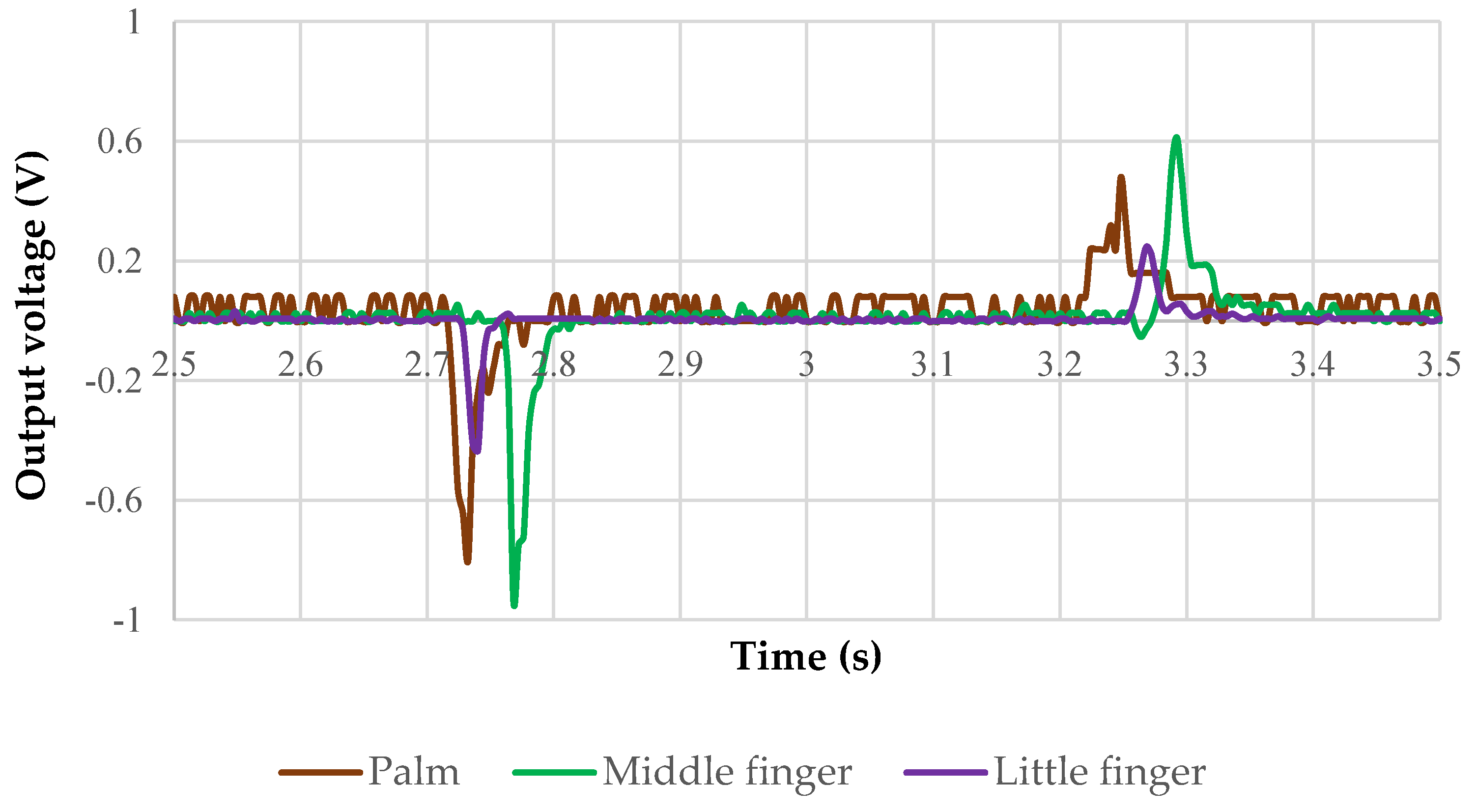
3. Experiments and Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, C.; Pathak, P.H.; Mohapatra, P. Finger-writing with Smartwatch: A Case for Finger and Hand Gesture Recognition using Smartwatch. In Proceedings of the 16th International Workshop on Mobile Computing Systems and Applications (Hotmobile’ 15), Santa Fe, NM, USA, 12–13 February 2015; pp. 9–14. [Google Scholar]
- McIntosh, J.; McNeill, C.; Fraser, M.; Kerber, F.; Lochtefeld, M.; Kruger, A. EMPress: Practical Hand Gesture Classification with Wrist-Mounted EMG and Pressure Sensing. In Proceedings of the 34th Annual Chi Conference on Human Factors in Computing Systems, Chi 2016, San Jose, CA, USA, 7–12 May 2016; pp. 2332–2342. [Google Scholar]
- Zhang, Y.; Harrison, C. Tomo: Wearable, Low-Cost, Electrical Impedance Tomography for Hand Gesture Recognition. In Proceedings of the Uist’15: Proceedings of the 28th Annual Acm Symposium on User Interface Software and Technology, Charlotte, NC, USA, 11–15 November 2015; pp. 167–173. [Google Scholar]
- Lv, Z.H.; Halawani, A.; Feng, S.Z.; ur Rehman, S.; Li, H.B. Touch-less interactive augmented reality game on vision-based wearable device. Pers. Ubiquitous Comput. 2015, 19, 551–567. [Google Scholar] [CrossRef]
- Zhao, R.N.; Ma, X.L.; Liu, X.H.; Li, F.M. Continuous Human Motion Recognition Using Micro-Doppler Signatures in the Scenario with Micro Motion Interference. IEEE Sens. J. 2021, 21, 5022–5034. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, G.; Yu, M.; Jiang, D.; Yun, J.; Liu, Y.; Liu, Y.; Chen, D. Gesture recognition based on surface electromyography-feature image. Concurr. Comput. Pract. Exp. 2021, 33, e6051. [Google Scholar] [CrossRef]
- Wu, Y.H.; Chen, K.; Fu, C.L. Natural Gesture Modeling and Recognition Approach Based on Joint Movements and Arm Orientations. IEEE Sens. J. 2016, 16, 7753–7761. [Google Scholar] [CrossRef]
- Esposito, D.; Andreozzi, E.; Gargiulo, G.D.; Fratini, A.; D’Addio, G.; Naik, G.R.; Bifulco, P. A Piezoresistive Array Armband with Reduced Number of Sensors for Hand Gesture Recognition. Front. Neurorobotics 2020, 13, 114. [Google Scholar] [CrossRef] [PubMed]
- Komolafe, A.; Zaghari, B.; Torah, R.; Weddell, A.S.; Khanbareh, H.; Tsikriteas, Z.M.; Vousden, M.; Wagih, M.; Jurado, U.T.; Shi, J.J.; et al. E-Textile Technology Review-From Materials to Application. IEEE Access 2021, 9, 97152–97179. [Google Scholar] [CrossRef]
- Zhang, Y.; Bowen, C.R.; Ghosh, S.K.; Mandal, D.; Khanbareh, H.; Arafa, M.; Wan, C.Y. Ferroelectret materials and devices for energy harvesting applications. Nano Energy 2019, 57, 118–140. [Google Scholar] [CrossRef]
- Rupitsch, S.J.; Lerch, R.; Strobel, J.; Streicher, A. Ultrasound Transducers Based on Ferroelectret Materials. IEEE Trans. Dielectr. Electr. Insul. 2011, 18, 69–80. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Wagih, M. Textile Tactile Senor Based on Ferroelectret for Gesture Recognition. Eng. Proc. 2022, 15, 8. https://doi.org/10.3390/engproc2022015008
Shi J, Wagih M. Textile Tactile Senor Based on Ferroelectret for Gesture Recognition. Engineering Proceedings. 2022; 15(1):8. https://doi.org/10.3390/engproc2022015008
Chicago/Turabian StyleShi, Junjie, and Mahmoud Wagih. 2022. "Textile Tactile Senor Based on Ferroelectret for Gesture Recognition" Engineering Proceedings 15, no. 1: 8. https://doi.org/10.3390/engproc2022015008
APA StyleShi, J., & Wagih, M. (2022). Textile Tactile Senor Based on Ferroelectret for Gesture Recognition. Engineering Proceedings, 15(1), 8. https://doi.org/10.3390/engproc2022015008