
Ambulatory Monitoring Using Knitted 3D Helical Coils †


Abstract
:1. Introduction
2. Materials and Methods
3. Results and Discussion
4. Electronic Readout
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Simpson, L.A.; Menon, C.; Hodgson, A.J.; Ben Mortenson, W.; Eng, J.J. Clinicians’ perceptions of a potential wearable device for capturing upper limb activity post-stroke: A qualitative focus group study. J. Neuroeng. Rehabil. 2021, 18, 135. [Google Scholar] [CrossRef]
- Zhou, H.; Stone, T.; Hu, H.; Harris, N. Use of multiple wearable inertial sensors in upper limb motion tracking. Med. Eng. Phys. 2008, 30, 123–133. [Google Scholar] [CrossRef]
- Isaia, C.; McMaster, S.A.; McNally, D. Study of Performance of Knitted Conductive Sleeves as Wearable Textile Strain Sensors for Joint Motion Tracking. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 4555–4558. [Google Scholar]
- Bonroy, B.; Meijer, K.; Dunias, P.; Cuppens, K.; Gransier, R.; Vanrumste, B. Ambulatory monitoring of physical activity based on knee flexion/extension measured by inductive sensor technology. Int. Sch. Res. Not. 2013, 2013, 908452. [Google Scholar] [CrossRef]
- Fobelets, K.; Thielemans, K.; Mathivanan, A.; Papavassiliou, C. Characterization of knitted coils for e-textiles. IEEE Sens. J. 2019, 19, 7835–7840. [Google Scholar] [CrossRef]
- Li, M.; Torah, R.; Nunes-Matos, H.; Wei, Y.; Beeby, S.; Tudor, J.; Yang, K. Integration and Testing of a Three-Axis Accelerometer in a Woven E-Textile Sleeve for Wearable Movement Monitoring. Sensors 2020, 20, 5033. [Google Scholar] [CrossRef]
- Fobelets, K.; Sareen, K.S.; Thielemans, K. Magnetic coupling with 3D knitted helical coils. Sens. Actuators A Phys. 2021, 332, 113213. [Google Scholar] [CrossRef]
- Kiener, K.; Anand, A.; Fobelets, W.; Fobelets, K. Low Power Respiration Monitoring using Wearable 3D knitted Helical Coils. IEEE Sens. J. 2022, 22, 1374–1381. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
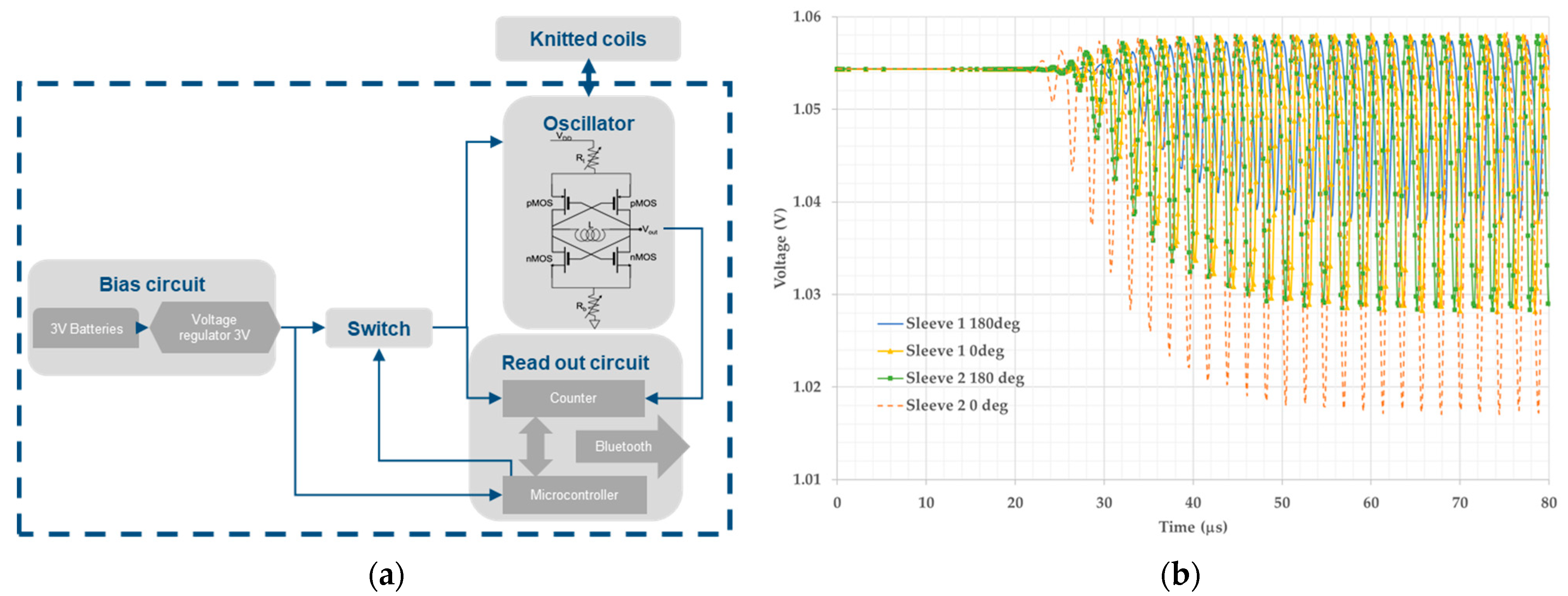
| Angle (°) | L (μH) | R (Ω) | fosc (kHz) | |A| (mV) | τ (μs) | |
|---|---|---|---|---|---|---|
| Sleeve 1 | 180 | 188 | 107 | 744.5 | 20 | 70 |
| Sleeve 1 | ~0 | 292 | 107 | 599.8 | 30 | 58 |
| Sleeve 2 | 180 | 338 | 124 | 558.0 | 30 | 50 |
| Sleeve 2 | ~0 | 505 | 124 | 457.6 | 41 | 49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fobelets, K.; Panteli, C. Ambulatory Monitoring Using Knitted 3D Helical Coils. Eng. Proc. 2022, 15, 6. https://doi.org/10.3390/engproc2022015006
Fobelets K, Panteli C. Ambulatory Monitoring Using Knitted 3D Helical Coils. Engineering Proceedings. 2022; 15(1):6. https://doi.org/10.3390/engproc2022015006
Chicago/Turabian StyleFobelets, Kristel, and Christoforos Panteli. 2022. "Ambulatory Monitoring Using Knitted 3D Helical Coils" Engineering Proceedings 15, no. 1: 6. https://doi.org/10.3390/engproc2022015006
APA StyleFobelets, K., & Panteli, C. (2022). Ambulatory Monitoring Using Knitted 3D Helical Coils. Engineering Proceedings, 15(1), 6. https://doi.org/10.3390/engproc2022015006