Abstract
Artificially intelligent advances such as tech gloves allow handicapped wearers to handle daily matters as normal. A wearable hand-rehabilitation system, i.e., a robotic arm, is engineered with controlled programming to control a disabled hand with features such as movement of fingers and holding items. A life-threatening disease (stroke) is caused when brain cells start to die, causing around 50–70% of patients to face paralysis and disability. People may face after-effects such as reduced use of the hand and limb or a paralyzed hand. Many methods have been introduced to overcome these issues, including therapies, but they are not so reliable when overcoming disability issues. To overcome these issues, we proposed a smart robotic hand that encounters hand disability issues. The smart robotic hand will aid the hands of disabled people by replacing their disabled hand with the smart robotic hand and by controlling the movement of the robot with the movement of the other hand. This can also be helpful for environments where it is not feasible for humans to work, such as in nuclear reactors and in bomb disposal squads. Some people have disabilities of the hand, so this smart robotic hand can also be used in that scenario. The robotic hand is mainly controlled through a flex sensor. By using Arduino, flex sensor outputs are mapped accordingly to the servo motors. The robot is controlled by a wired arrangement.
1. Introduction
In today’s era, prosthetic hands, legs and limbs are required in various scenarios as people go through many accidents and lose their body parts, or paralysis causes their body parts such as limbs, hands or legs to stop working. We propose the design of a robot that will control the movements of the hand. The design and implementation of a new mechanism for disabled people which can be used as a helping hand [1] and the design of an underactuated prosthetic hand are presented in [2]. J. Zhang et al. [3] worked on the hand-dexterous robotic’s upper limb prosthesis, specifically the mechanical and manipulation aspects. S. Mukherjee [4] proposed an application of how to control a robotic arm with the hand movement of the operator. T. Morita [5,6] developed a five-fingered robotic hand using ultrasonic motors and resilient elements, with a five-fingered robotic hand having just about an equivalent number of degrees of freedom. The authors of [7,8] proposed easing the control of the robotic arm with hand gestures by using flex bend sensors and servo motors. The authors of [9,10] proposed kinetostatic analysis of underactuated fingers. The purpose of this paper was to design a robotic hand and a simple EMG input controller with a biologically inspired parallel actuation system for prosthetic applications. The remaining parts of this paper are sectioned as follows: Section 2 discusses robot-assisted therapy, which is the background of this project; Section 3 is related to the experiment for mirror therapy and in Section 4, the conclusion is discussed.
2. System Design
The hand rehabilitation system of the system is depicted in Figure 1.
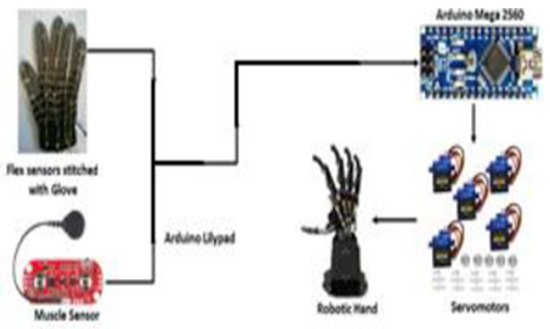
Figure 1.
Complete block diagram of the system.
- A.
- Servo Motor and its Control:
The movement of the fingers of the robotic hand based on five servo motors that have been used, one for each finger movement. All servos have been used to perform mirror and task-oriented therapy by controlling movement of the fingers of the robotic hand. The interface for servomoters with MCU is shown in Figure 2.
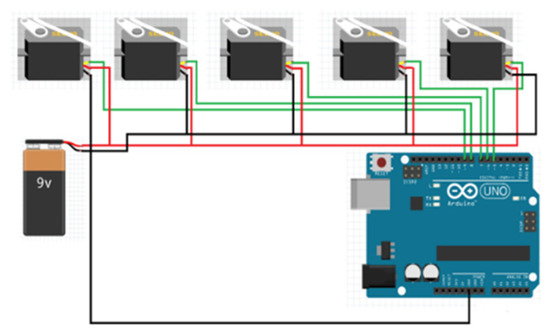
Figure 2.
Schematic of interfacing servo motors with MCU.
PWM causes the shafts of the servo motor to rotate at a specific torque level, which will rotate the servos’ shaft. Table 1 showcases the connections of the servo motors and PWM ports.

Table 1.
Connection of servo motors with PWM ports.
- B.
- Movement of Figures and its Control:
The designed robotic hand moves as fingers start to move in a horizontal and vertical direction due to the change in the shaft’s rotation of the servo motor. Arduino sends PWM signals to the servo motors and flex sensors; Arduino causes the shaft’s rotation in the servo motor and movement of the fingers is controlled. For each finger, opening and closing angles are defined. Table 2 describes the opening and closing angle of each finger.
Table 2.
Opening and closing angles of each finger.
- C.
- Movement via Flex Sensor:
The goal is to perform mirror therapy with flex sensors and mirror it on the robotic hand. As the flex sensors bend, the same movement is mimicked in the robotic hand depending on the angle the flex sensor is bent on. The integration of sensors on gloves are depicted in Figure 3a and a schematic diagram is shown in Figure 3b. MCU generates appropriate PWM signals for controlling servo motors and ultimately controls the robotic hand. The end-to-end connection of flex sensors with Arduino Uno are shown in Table 3.
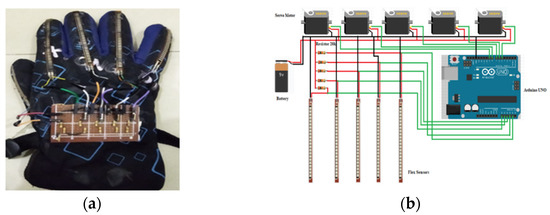
Figure 3.
(a): Flex sensors with hand glove, (b): schematic of flex sensors and servo motors.
Table 3.
Flex sensors’ connections with Arduino Uno.
3. Experiment for Mirror Therapy
Two types of experiments for mirror therapy were performed in this work. One was an offline experiment for feature extraction and for gesture recognition. The other was an online experiment assessing the real-time performance for a sensing–actuation combination of the gloves. We selected a real clinical trial and eight subjects (five male and three female), with normal hand motor function and ranging in age from 22 to 32 years, were engaged. The machine learning was implemented on Matlab 2016a, running on the PC with 64-bit Windows 10, 3.6-GHz Intel i7-7700 processor, and 16 GB of RAM.
Each servo motor resulted in the movement of a single finger. The output generated by each flex sensors resulted in the controlled movement of fingers. The degree at which the flex sensor bent caused the robotic hand to move in the same fashion. The outputs generated were given to the Arduino board, which evaluated the data and then sent the data to the servo motors where the shafts of the servo motors started to rotate according to angles received and the fingers started to move. The change in voltage generated by the bend in each flex sensor is given in Table 4. The first group contains CH, RH and FA, which refer to the movement of all the fingers together. The second group is finger flexion (FT, FI, FM and FR), focusing on single finger’s movement. The third group is thumb-to-finger tapping (FTM, FTR, FTL and FTI), which indicates coordinated hand motor function. The fourth group includes several common gestures, such as “GOOD” and “VICTOR”. Task-oriented therapy was performed to calibrate and test the working of the flex sensor. Figure 4 shows the results of different experiment in which the robotic hand and glove is open, closed, thumb and index figure closed, thumb is closed and holding the object.
Table 4.
Change in voltages caused by flex sensors movement.
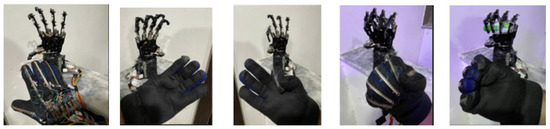
Figure 4.
Robotic hand and glove in different conditions.
4. Conclusions
This work was designed to help handicapped, disabled or paralyzed patients who are not able to do their work on their own and live a life totally dependent on other people. The arrangement of Arduino made it possible to interface the circuitry and to control the robotic hand easily. This makes the robot able to work efficiently and in a highly calibrated and accurate manner. Different objects of different shape, size and weight can be held by the robotic hand. Disable people can find benefits from this robotic hand so they are able to perform their daily tasks and live a normal life at their full potential just with the help of a robotic hand. Thus, this will make the disabled person independent and the need for someone to help that person in his/her tasks will be reduced just by a single robotic hand.
Author Contributions
Conceptualization, M.K.S., W.A. and W.S.; methodology, M.K.S. and U.S.; software, N.A.K.; validation, M.K.S., W.A., S.M.K. and N.A.K.; formal analysis, M.K.S., W.A., W.S., U.S., S.M.K. and N.A.K.; investigation, M.K.S. and W.A.; resources, M.K.S.; writing—original draft preparation, M.K.S., W.A. and W.S.; writing—review and editing, M.K.S., W.A. and U.S.; visualization, W.S.; supervision, W.A.; project administration, M.K.S. and W.A.; funding acquisition, M.K.S. and W.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
All the data used in this work is already cited.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yang, H.; Wei, G.; Ren, L. Design and Development of Linkage-Tendon Hybrid Driven Anthropomorphic Robitc Hand. In Intelligent Robotics and Applications, Proceedings of the 12th International Conference on Intelligent Robotics and Applications, Shenyang, China, 8–11 August 2019; Springer: Cham, Switzerland, 2019; pp. 117–128. [Google Scholar]
- Teng, Z.; Xu, G.; Liang, R.; Li, M.; Zhang, S.; Chen, J.; Han, C. Design of an Underactuated Prosthetic Hand with Flexible Multi-Joint Fingers and EEG-Based Control. In Proceedings of the IEEE International Conference on Cyborg and Bionic Systems (CBS), Shenzhen, China, 25–27 October 2018; pp. 647–651. [Google Scholar]
- Zhang, J.; Xu, C.; Fang, Z.; Sun, X.; Chen, W. Design of an Underactuated Body Fixture for a 7-DOF Cable-Driven Upper Limb Exoskeleton. In Proceedings of the 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020; pp. 1538–1543. [Google Scholar]
- Neha, E.; Suhaib, M.; Mukherjee, S. Grasp Force Analysis of Four-finger Tendon Actuated Robotic Hand. In Proceedings of the Advances in Robotics, Chennai, India, 2–6 July 2019; pp. 1–5. [Google Scholar]
- Tanoue, Y.; Morita, T. Miniature Ultrasonic Linear Motor Capable of Applying Opposing Preload. In Proceedings of the ACTUATOR 2018; 16th International Conference on New Actuators, Bremen, Germany, 25–27 June 2018; pp. 1–4. [Google Scholar]
- Liang, C.; Wang, Y.; Yao, T.; Zhu, B. A shape memory alloy–actuated soft crawling robot based on adaptive differential friction and enhanced antagonistic configuration. J. Intell. Mater. Syst. Struct. 2020, 31, 1920–1934. [Google Scholar] [CrossRef]
- O’toole, K.T.; McGrath, M.M. Mechanical design and theoretical analysis of a four fingered prosthetic hand incorporating embedded SMA bundle actuators. Eng. Technol. 2017, 25, 142–149. [Google Scholar]
- Chen, T.; Haas-Heger, M.; Ciocarlie, M. Underactuated Hand Design Using Mechanically Realizable Manifolds. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 7392–7398. [Google Scholar]
- Salvietti, G.; Hussain, I.; Malvezzi, M.; Prattichizzo, D. Design of the Passive Joints of Underactuated Modular Soft Hands for Fingertip Trajectory Tracking. IEEE Robot. Autom. Lett. 2017, 2, 2008–2015. [Google Scholar] [CrossRef] [Green Version]
- Birouas, F.-I.; Tarca, R.-C. Development and testing of a mixed feedback control system for robotic hand exoskeleton. In Proceedings of the 2019 15th International Conference on Engineering of Modern Electric Systems (EMES), Oradea, Romania, 13–14 June 2019; pp. 17–20. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).