Abstract
Strawberries, a high-value crop with growing demand, face increasing challenges from labour shortages, declining pollinator populations, and the limitations of inconsistent manual pollination. This paper presents an IoT-enabled robotic system designed to automate strawberry pollination in open-field raised-bed environments with minimal human intervention. The system consists of a mobile rover equipped with an ESP32-CAM for image capture and a robotic arm mounted on an Arduino Uno, capable of controlled X, Y, and Z positioning to perform targeted pollination. Images of strawberry beds are transmitted to a locally deployed server, which uses a lightweight detection model to identify flowers. System components communicate asynchronously via HTTP and I2C protocols, and the onboard event-driven architecture enables responsive behaviour while minimizing RAM and power usage, which is an essential requirement for low-cost, field-deployable robotics. The server also manages multi-rover scheduling through a custom priority queue designed for low-end hardware. In controlled lo0ad tests, the scheduler improved average response time by 6.9% and handled 2.4% more requests compared to the default queueing system, while maintaining stability. Preliminary field tests demonstrate successful flower identification and reliable arm positioning under real-world conditions. Although full system yield measurements are ongoing, current results validate the core design’s functional feasibility. Unlike previous systems that focus on greenhouse deployments or simpler navigation approaches, this work emphasizes modularity, affordability, and adaptability for small and medium farms, particularly in resource-constrained agricultural regions such as Sri Lanka. This study presents a promising step toward autonomous and scalable pollination systems that integrate embedded systems, robotics, and IoT for practical use in precision agriculture.
1. Introduction
In Sri Lanka, 25% of the local population depends on the agricultural sector as their primary source of income. However, compared to other South Asian countries, Sri Lanka produces a smaller quantity of crops that meet international export quality standards. To achieve such high standards, small- to medium-scale farmers must invest more resources and labor to maintain quality control from crop cultivation to food processing, while also facing challenges from an unpredictable market [1].
High-value crops such as strawberries, grown in greenhouses under intensive labor care, demand significantly greater management and attention compared to other native crops with wide spread. Although large-scale farms are increasingly adopting hydroponic cultivation techniques to enhance efficiency and yield, small- to medium-scale farmers remain constrained in their capacity to implement such advanced systems. Consequently, their production practices largely depend on plastic-covered raised-bed farming methods, which serve as a more accessible yet less technologically advanced alternative.
Many farmers devote comparatively less attention to flower pollination, despite its critical role in maximizing crop yields. Bees serve as the primary pollinators for numerous plant varieties, including strawberries. However, global warming, habitat loss, and the excessive use of pesticides have contributed to a rapid worldwide decline in bee populations. In greenhouse cultivation, where natural pollinator access is restricted, farmers are often forced to rely on alternative methods such as wind pollination or labor-intensive hand pollination to ensure adequate fruit set and yield.
This study analyzes the effects of artificial pollination without direct human intervention, focusing on its potential to enhance fruit quality through increased cross-pollination among flowers. The discussion encompasses autonomous pollination, natural bee-mediated pollination, and manual hand pollination. Furthermore, the research explores the use of an autonomous rover equipped with a robotic arm and modified sensors, evaluating its effectiveness in pollinating not only strawberry plants but also its potential applicability to other crop varieties.
2. Literature Review
2.1. Importance of Pollination in Agriculture
Pollinators play a critical role in sustaining biodiversity and agricultural productivity, with more than 87.5% of flowering plant species relying on them, and animal-mediated pollination supporting approximately 35% of global crop production [2]. These pollinators include a wide variety of species, ranging from winged insects such as bees and butterflies, to non-winged insects such as ants, as well as vertebrates including hummingbirds, bats, and even certain mammals like ruffed lemurs. Natural pollinators facilitate cross-pollination, thereby reducing the incidence of self-pollination within the same plant. This process enhances key fruit characteristics such as size, weight, and shape, all of which are essential for improving both the quality and marketability of harvests.
In industrial agriculture, monoculture farming systems are prevalent, in contrast to traditional farming practices where multiple crops are cultivated together, often in harmony with natural pollinators. Monoculture farms, however, reduce biodiversity and limit opportunities for natural pollination, thereby increasing reliance on alternative pollination methods such as wind. In certain crops, such as vanilla, natural or wind pollination is insufficient, making manual, labor-intensive hand pollination indispensable to ensure adequate fruit set and yield [3].
2.2. Decline of Natural Pollinators
In industrial agriculture, monoculture farms often depend heavily on the extensive use of pesticides, herbicides, and other agrochemicals to maintain crop health and suppress pests. While these chemicals are intended to protect crops, they inadvertently exert harmful effects on non-target organisms, including beneficial pollinators. Systemic pesticides impair the foraging behavior, navigation ability, and reproductive success of bees and other insect pollinators, ultimately contributing to colony decline. Herbicides, although primarily designed to eliminate weeds, indirectly reduce the availability of flowering plants that serve as vital food sources for pollinators [4]. Consequently, the widespread reliance on chemical inputs in monoculture farming systems not only undermines ecological balance but also exacerbates the global decline of pollinator populations, posing long-term risks to both biodiversity and agricultural sustainability.
As a result of global warming, many pollinator species are exhibiting shifts in their behavior, distribution, and habitat preferences. Rising temperatures and altered precipitation patterns disrupt flowering times and the synchrony between plants and their pollinators, leading to a decline in effective pollinators [5]. In addition, some species are forced to abandon their traditional habitats and migrate to more climatically suitable regions, often reducing their population density in previously cultivated areas. Such climate-driven changes, combined with the direct effects of human interventions such as habitat loss, further exacerbate the global decline of pollinator populations.
2.3. Existing Pollination Methods in Greenhouse Cultivation
In greenhouse cultivation, some farmers collaborate with beekeepers to introduce managed colonies and facilitate natural pollination under controlled conditions. However, this practice is often subject to various restrictions, including limited space, altered light conditions, and artificial microclimates that may not be optimal for pollinator activity. In addition, not all pollinator species are equally suitable for every type of crop, as pollination efficiency depends on species-specific behaviors, body morphology, and flower characteristics. Consequently, the selection of appropriate pollinator species becomes a critical factor in determining the success of natural pollination within greenhouse environments [6].
Labor-intensive hand pollination is widely practiced in the cultivation of certain high-economic-value crops where natural or alternative pollination methods are insufficient. This technique allows for precise pollen transfer, ensuring fruit set and quality, but requires significant human effort and time investment [7]. Although effective, the high labor costs and limited scalability of hand pollination make it less feasible for large-scale commercial farming.
2.4. Advances in Autonomous and Robotic Pollination
Drones have been the focus of numerous research initiatives as an emerging tool for artificial pollination. Their application is particularly valuable in contexts where natural pollinators are absent and traditional methods, such as hand pollination, are impractical. Drones are especially effective in simulating wind pollination by dispersing pollen over a wide area. However, some research also highlights limitations, as drone-based systems are less effective for crops that require targeted or species-specific pollination, underscoring the need for further technological advancements to improve precision and adaptability [8].
2.5. Pollination in the Sri Lankan Agricultural Context
Native and wild bee species remain indispensable for sustaining Sri Lankan agriculture, as they directly contribute to enhancing crop yields, fruit quality, and overall farm productivity. These pollinators still play a crucial role not only in traditional farming systems but also in large-scale crop cultivation, the preservation and promotion of native pollinator populations represent a vital component of long-term agricultural sustainability and food security in such a situation [9].
2.6. Comparison with State of the Art
Table 1 compares the proposed raised-bed ground rover pollination system with selected representative solutions from the recent literature and industry (references chosen to represent drone systems, dedicated greenhouse robots, and other artificial pollination approaches). The table highlights differences in target environment, pollination mechanism, and the specific novelty of our approach.

Table 1.
Comparison of the proposed system with representative state-of-the-art pollination solutions.
3. Methodology
The approach utilizes a ground-based autonomous rover, specifically designed for farms with raised beds ranging from a few inches up to one foot above the ground, allowing for traversal beneath the beds. The system integrates the rover with a sensor-equipped pollination arm, a server, databases, and a mobile application for monitoring and control.
3.1. System Overview
The entire system, including its hardware components, has been designed with the objective of minimizing human intervention during operation while maintaining a low material cost. The primary focus of this design is to ensure affordability for farmers, particularly in contexts where purchasing power is limited. By reducing the overall cost of ownership, the system encourages adoption and reduces barriers to accessing advanced technologies. In turn, this enables farmers to enhance their profit margins through improved efficiency and reduced labor expenses.
The rover, which also performs pollination tasks, is constructed using an aluminum frame as shown in Figure 1.

Figure 1.
Rover with robotic arm on top of testing flower setup.
Aluminum was selected due to its cost-effectiveness and lightweight properties compared to alternative materials such as wood or steel. To power the rover, either rechargeable batteries or an AC power supply can be utilized, depending on the user’s preference. The power unit and controller unit are enclosed within a non-conductive plastic housing to ensure safety and protection of electronic components.
The control system is based on two types of micro-controllers. An ESP32-CAM (Espressif Systems, Shanghai, China) module is employed to serve as both the communication interface and the vision system, enabling image capture and wireless data transmission. In parallel, an Arduino Uno micro-controller (Ivrea, Italy) is used to manage the rover’s mechanical components and to process sensor data. Figure 2 presents the control panel of the system.
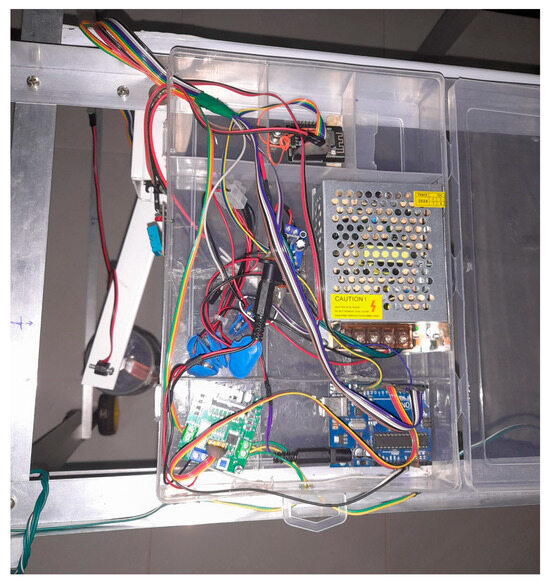
Figure 2.
Top view of the rover controller panel with micro-controllers.
Communication between the two micro-controllers is achieved through the Inter-Integrated Circuit (I2C) protocol, ensuring reliable and synchronized operation during pollination activities.
The rover’s operation and control system is designed as either a fully or partially server-dependent architecture. The ESP32-CAM module communicates with the server to facilitate rover navigation and operational tasks. The server infrastructure can be deployed locally on a user’s personal computer or remotely on cloud-based platforms, thereby enabling accessibility to a wider range of users through the internet. A Python-based FastAPI (0.115.5) framework is utilized to implement the server, which also supports the integration of a YOLOv8-based image processing model. This model processes image data transmitted from the ESP32-CAM, enabling object detection and decision-making required for autonomous pollination operations.
The data generated during the rover operations are stored in a PostgreSQL database, which serves as the central data management system. This database facilitates seamless integration with the mobile application, enabling users to control the rover in real time and to analyze the data collected during its operation. Through this architecture, users gain access to both operational control and analytical insights, thereby enhancing usability and decision-making in the pollination process.
3.2. Image Processing Model
During rover operations, the ESP32-CAM module captures data and transmits it to the server for processing. The server analyzes the incoming data to extract the spatial coordinates of the flowers in the X–Y plane and records these coordinates in the database, along with the total count of detected flowers. The processed coordinates are then transmitted back to the rover, enabling the robotic arm to accurately traverse the flower bed and perform the pollination process. An example of the flower detection output generated by the image processing server is provided in Figure 3.
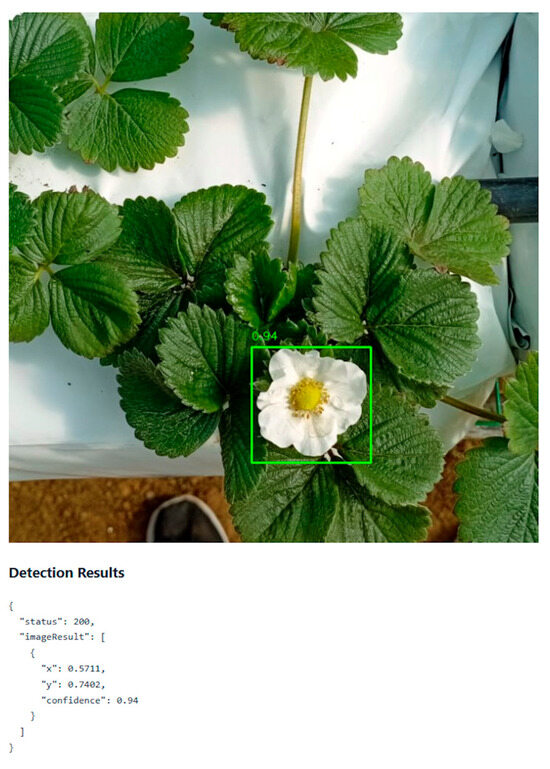
Figure 3.
Result from image processing function with coordinates.
Additionally, a priority-based scheduling algorithm was implemented on the server to manage image processing requests more efficiently. The system adjusts request priorities dynamically to balance resource usage and maintain response times. When the number of pending requests from a particular rover passes a pre-defined limit, that rover’s priority is raised. Response times for each route are monitored using an exponential moving average, and if the average goes beyond a threshold, the route’s priority is also raised. In addition, specific routes can be manually assigned higher priority when needed.
3.3. Arm Angle Calculation
The movements of the robotic arm are synchronized with the travel distance of the rover, which is determined by the server based on previously recorded operational data. This integration ensures coordinated navigation and pollination, thus improving accuracy and efficiency during field operations, as demonstrated by Figure 4.
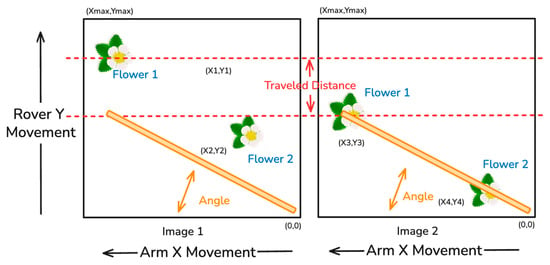
Figure 4.
Robotic arm positioning during pollination.
- Rover Y Movement, if the rover is at position Ry (in world Y-axis), and a flower is detected at image Y coordinate Yi, then the world Y-coordinate of the flower is
Yw = Ry + Yi
- If the rover moves forward between Image 1 and Image 2:
∆Ry = Ry2 − Ry1 = Y1 − Y3
- Therefore, the traveled distance is
Dtravel = |Y1 − Y3|
- Arm X Movement, the flower position in X-axis determines how much the arm should move left or right. If the arm base is at Xbase, and flower detected at image X coordinate Xi, then
Xarm = Xi − Xbase
- If Xarm > 0 the arm moves right, whereas Xarm < 0 indicates leftward motion.
- The arm must rotate to point towards the flower. Let the arm base be at (Xbase, Ybase) and the flower coordinates be (Xi, Yi). The angle is
- This angle is relative to the horizontal axis.
- Pollination on Targeted flower Position
(Xw, Yw) = (Xi, Ry + Yi)
- The arm must move to the position
Xarm = Xi − Xbase
- Iterative algorithm for each captured image, for each flower (Xi, Yi):
- Convert to world Y:
Yw = Ry + Yi
- 2.
- Compute arm displacement:
X arm = Xi − Xbase
- 3.
- Compute arm angle
- 4.
- Move rover forward:
Ry ← Ry + Dtravel
3.4. Pollination End and the Sensor Setup
The proposed flower detection system integrates three sensing modules: capacitive touch, infrared (IR) range, and color detection, into a compact, unified unit designed to differentiate strawberry flowers from surrounding leaves, fruits, and non-relevant agricultural materials.
The capacitive touch sensor (TTP223, Tontek Design Technology, Shenzhen, China) detects conductive surfaces, including moisture-rich plant structures, through variations in capacitance. An additional wire is incorporated to expand the detection area for flowers of varying sizes and to minimize interference from adjacent sensors and wiring. The sensor provides a binary output that indicates the presence or absence of a conductive object. Figure 5 shows the touch sensor of the sensor setup.

Figure 5.
Capacitive touch sensor with additional wire.
The IR range sensor (Adafruit Industries, Brooklyn, NY, USA), equipped with a variable resistor, enables adjustable detection distances from 2 to 80 cm, facilitating accurate flower proximity measurement. The sensor outputs boolean values corresponding to object detection within the set range.
The color detection module comprises a light-sensitive photo-resistor and an RGB LED (HW Industrial, Shenzhen, China). A custom algorithm sequentially activates red, green, and blue illumination, measuring reflected light intensity for each wavelength. The resulting analog values (0–1023) are used to classify surface colour characteristics.
To mitigate external light interference, the entire sensor assembly is enclosed in a black, non-reflective housing, ensuring consistent performance under varying ambient lighting conditions. The sensor system architecture is outlined in Figure 6.
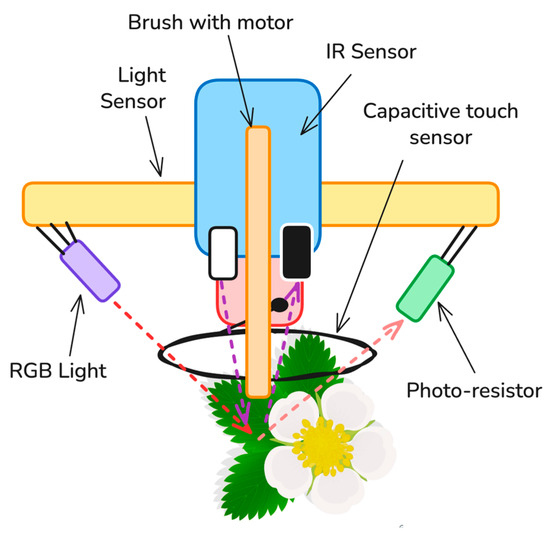
Figure 6.
Sensor module.
The colors of the flower under separate red, green, and blue illumination are shown in Figure 7a–c These conditions were used to measure the respective intensity values with the photo-resistor. When all three lights are activated simultaneously, the result is white illumination, as illustrated in Figure 7d. The sensor records values only under individual color illumination.
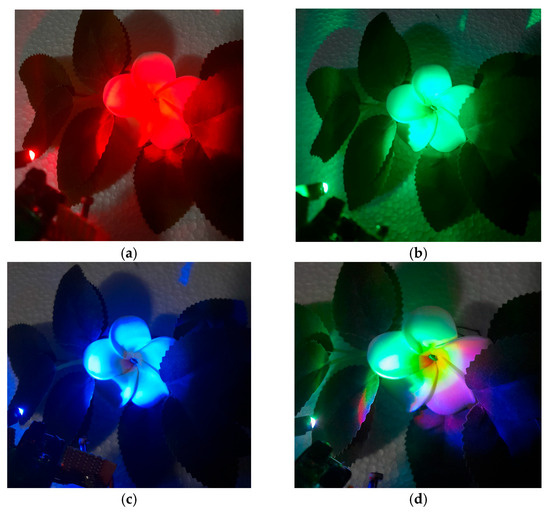
Figure 7.
Flower under different illumination conditions (a–d).
The recorded values, ranging from 0 to 1023 for each of the three colors, are compared with the predefined color range for the target flower. This comparison determines whether the sensor is positioned precisely above the intended flower for pollination.
Figure 8 displays the final module fitted with a pollination brush. A small vibration motor (Vybronics, Wenzhou, China), similar to the haptic feedback motors used in mobile phones, is attached to the brush to mimic the behavior of a bee when placed on a flower. The imbalance in the motor’s internal weight generates vibrations, with the intensity varying according to the applied voltage. During operation, pollen from one flower coats the tip of the brush. When the brush is moved to another flower, the collected pollen is deposited onto the second flower while simultaneously collecting its pollen onto the brush.
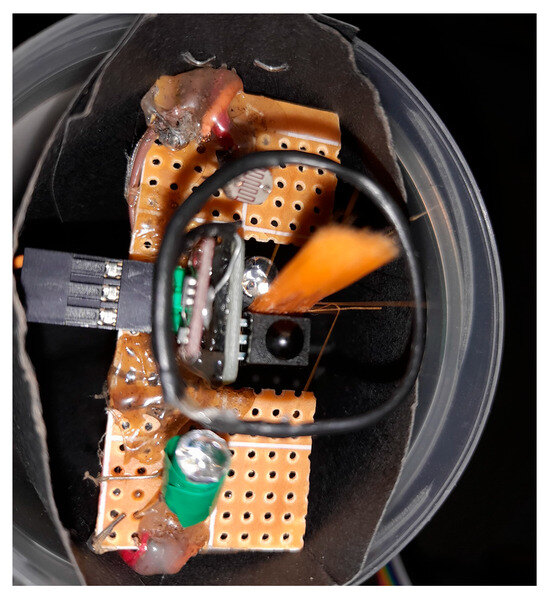
Figure 8.
Sensor module with brush.
3.5. Sensor Design Considerations
The utilization of a custom-designed sensor is motivated by the need to avoid reliance on camera modules and their associated complex algorithms for flower detection. This sensor provides critical data, including flower presence (liveness), relative distance, and color characteristics. Leveraging these parameters, a streamlined, purpose-built algorithm allows precise commands to the pollination brush, enabling efficient and autonomous pollen collection.
The detectable distance of the IR sensor corresponds to the distance to the tip of the brush used for pollination. This distance can be calibrated using the variable resistor that comes with the sensor. The maximum distance to the brush is also configured in this manner. The capacitive sensor is positioned 0.25 cm above the tip of the brush, allowing the brush to reach the center of the flower while detecting the petals. Subsequently, the RGB lights illuminate sequentially, and their intensity values are measured via the photo-resistor. These values are then compared with the predefined ranges assigned for each type of flower by the algorithm embedded in the micro-controller.
4. Result
4.1. Sensor Module Performance
The effectiveness of pollen collection is also influenced by the type of brush employed, as different flower varieties require distinct brush characteristics for optimal performance. Similarly, the accuracy of the flower detection sensor is dependent on flower size; since the infrared (IR) sensor requires a relatively large surface area for reliable detection, it may produce false positives in cases involving smaller flowers. In addition, the capacitive touch sensor is susceptible to false signals on surfaces where residual electronic charges are present.
Table 2 presents the average values obtained from the color sensor module, calculated over 12 repeated measurements. Each value was derived by computing the summation of the RGB components and dividing the result by three. The data indicate that darker surfaces yield comparatively lower values, whereas lighter surfaces produce substantially higher values. The readings are also influenced by the surface texture of the material, with all tested samples having a matte finish. Among these measurements, the leaf and flower values represent the primary test scenario. By distinguishing the difference between leaf and flower values, the sensor is able to determine whether the pollination process should be initiated.
Table 2.
Average color sensor readings (0–1023) for different coloured surfaces.
4.2. Model Detection Performance
The flower detection model achieved a mean average precision (mAP) of 0.88 at an IoU threshold of 0.5, with a true positive rate of 88%. These results indicate that the model can reliably identify flowers in field conditions while making sure that missed detections remain limited. Occasional errors were observed when flowers had low contrast against the background, but overall performance was sufficient for integration into the scheduling and resource allocation system. The customized priority queue achieved a 6.9% improvement in average response time (402.58 ms vs. 374.86 ms) in load tests and handled 2.4% more requests (3720 vs. 3632) while maintaining identical stability over an out-of-the-box priority queue.
5. Conclusions
The analysis of average values obtained from the color sensor module demonstrates its ability to distinguish between different surface colors under controlled conditions. The results confirm that darker surfaces consistently yield lower sensor values, while lighter surfaces produce higher values, with measurements further influenced by the matte surface texture of the tested materials. Most importantly, the distinct difference between leaf and flower values provides a reliable basis for decision-making in the pollination process. This distinction enables the system to accurately identify target flowers, thereby supporting the automation of pollination in agricultural applications.
Author Contributions
Conceptualization, R.T.K.; methodology, R.T.K., C.W., M.A.M.A. and C.S.W.A.; software, R.T.K., M.A.M.A. and C.S.W.A.; validation, C.W. and M.A.M.A.; formal analysis, C.W.; investigation, C.S.W.A.; resources, R.T.K.; data curation, C.S.W.A.; writing—original draft preparation, C.W.; writing—review and editing, C.W.; visualization, R.T.K., M.A.M.A. and C.S.W.A.; supervision, K.D., B.N.S. and R.E.W.; project administration, R.T.K.; funding acquisition, R.T.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data supporting the findings of this study are not publicly available due to the ongoing development of the project but may be available from the corresponding author upon reasonable request.
Acknowledgments
The authors express their sincere gratitude to Sen Horti Strawberry Farm for granting access to their facilities and supporting the field testing of the pollination system.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Agriculture Data Bulletin—February 2025. Central Bank of Sri Lanka. 10 May 2025. Available online: https://www.cbsl.gov.lk/sites/default/files/cbslweb_documents/statistics/agriculture_data_bulletin_2025_february_e.pdf (accessed on 21 May 2025).
- Katumo, D.M.; Liang, H.; Ochola, A.C.; Lv, M.; Wang, Q.-F.; Yang, C.-F. Pollinator diversity benefits natural and agricultural ecosystems, environmental health, and human welfare. Plant Divers. 2022, 44, 429–435. [Google Scholar] [CrossRef] [PubMed]
- Van Dyk, S.; McGlasson, W.B.; Williams, M.; Spooner-Hart, R.; Holford, P. Vanilla planifolia: Artificial and insect pollination, floral guides and volatiles. Plants 2024, 13, 2977. [Google Scholar] [CrossRef] [PubMed]
- Cohen, H.; Smith, G.P.; Sardiñas, H.; Zorn, J.F.; McFrederick, Q.S.; Woodard, S.H.; Ponisio, L.C. Mass-flowering monoculture attracts bees, amplifying parasite prevalence. Proc. R. Soc. B Biol. Sci. 2021, 288, 20211369. [Google Scholar] [CrossRef] [PubMed]
- Rahimi, E.; Jung, C. Global Trends in Climate Suitability of Bees: Ups and Downs in a Warming World. Insects 2024, 15, 127. [Google Scholar] [CrossRef] [PubMed]
- Nader, E.A.; Kleftodimos, G.; Kyrgiakos, L.S.; Kleisiari, C.; Gallai, N.; Darwich, S.; Berchoux, T.; Vlontzos, G.; Belhouchette, H. Linking Beekeepers’ and Farmers’ Preferences towards Pollination Services in Greek Kiwi Systems. Animals 2023, 13, 806. [Google Scholar] [CrossRef] [PubMed]
- Wurz, A.; Grass, I.; Tscharntke, T. Hand pollination of global crops—A systematic review. Basic Appl. Ecol. 2021, 56, 299–321. [Google Scholar] [CrossRef]
- Miyoshi, K.; Hiraguri, T.; Shimizu, H.; Hattori, K.; Kimura, T.; Okubo, S.; Endo, K.; Shimada, T.; Shibasaki, A.; Takemura, Y. Development of Pear Pollination System Using Autonomous Drones. Agriengineering 2025, 7, 68. [Google Scholar] [CrossRef]
- Gunatilleke, M. Flower Visiting Fauna of Sri Lanka: An Inventory of Pollinators. 2020. Available online: http://envmin.nsf.gov.lk/bitstream/handle/1/555/ENV_0097.pdf?sequence=2&isAllowed=y (accessed on 21 May 2025).








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).