
Displacement Sensing of an Active String Actuator by an Optical Fiber †

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
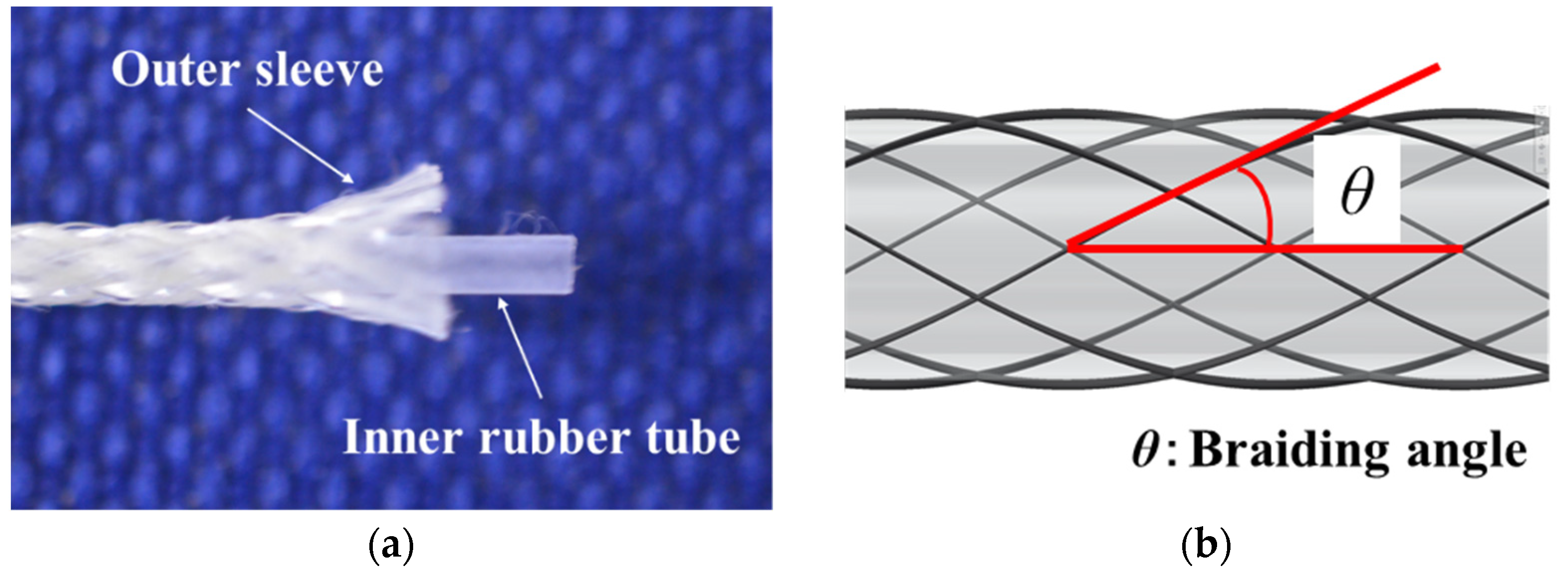
2.1. Thin Artificial Muscles
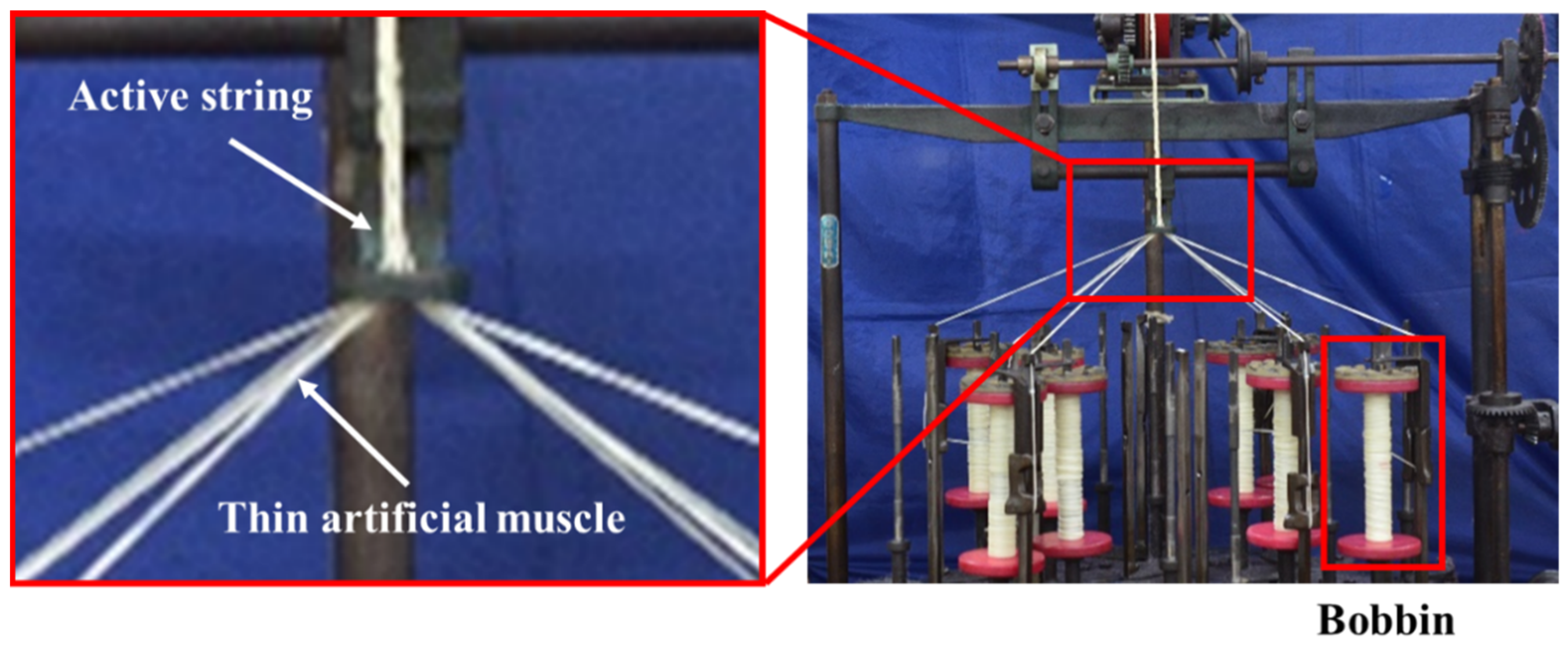
2.2. Production Method of the Active String
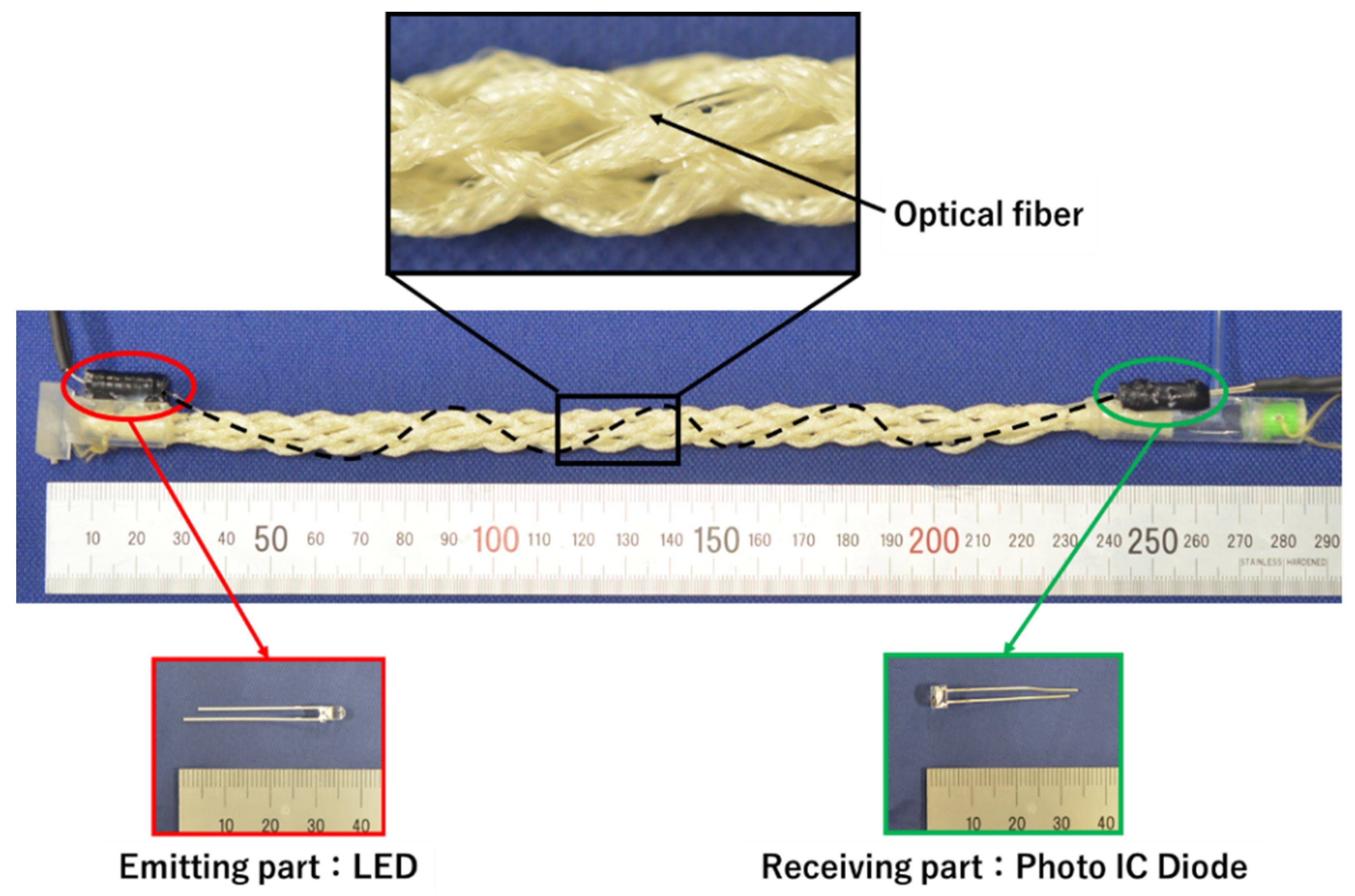
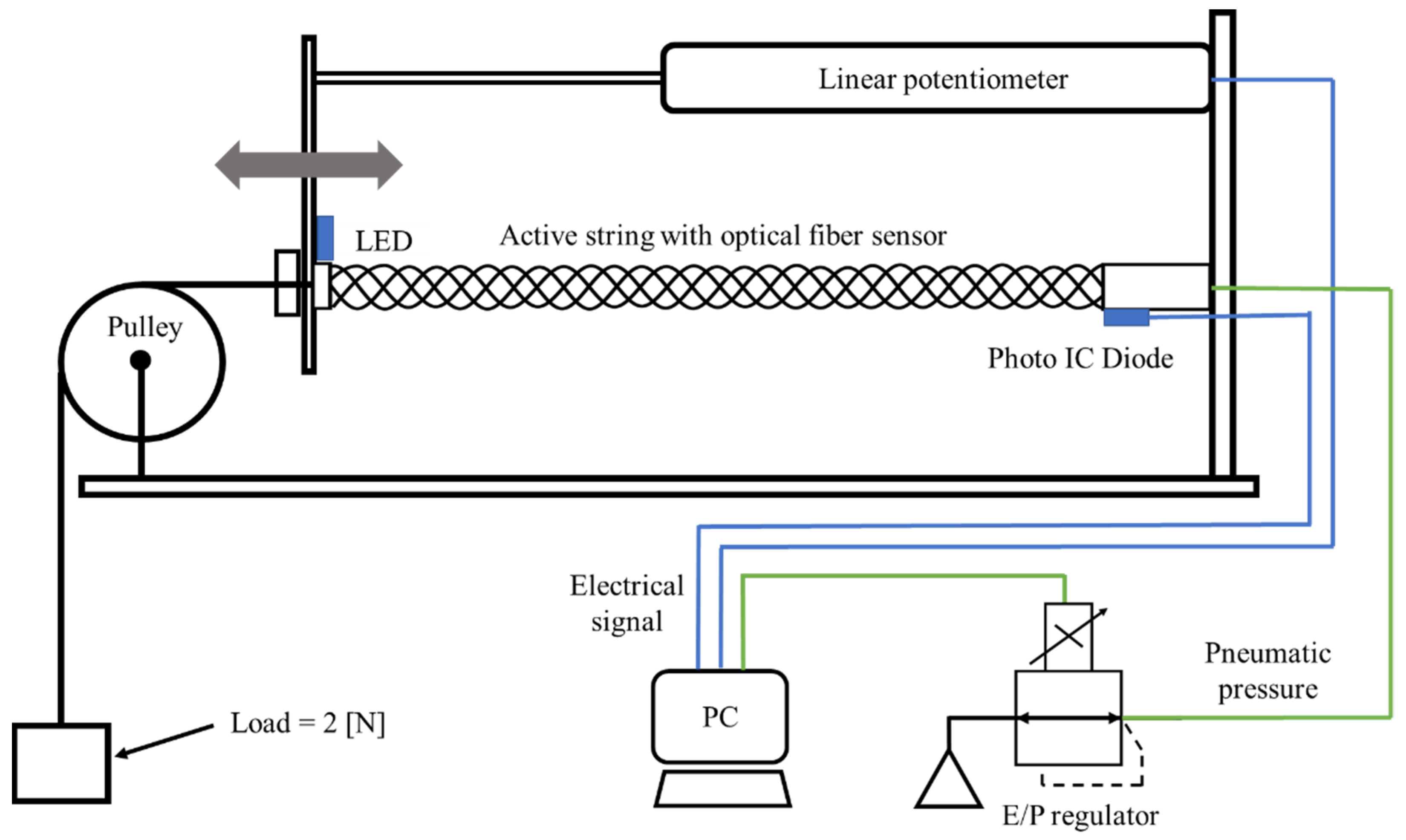
2.3. The Active String with the Optical Fiber Sensor
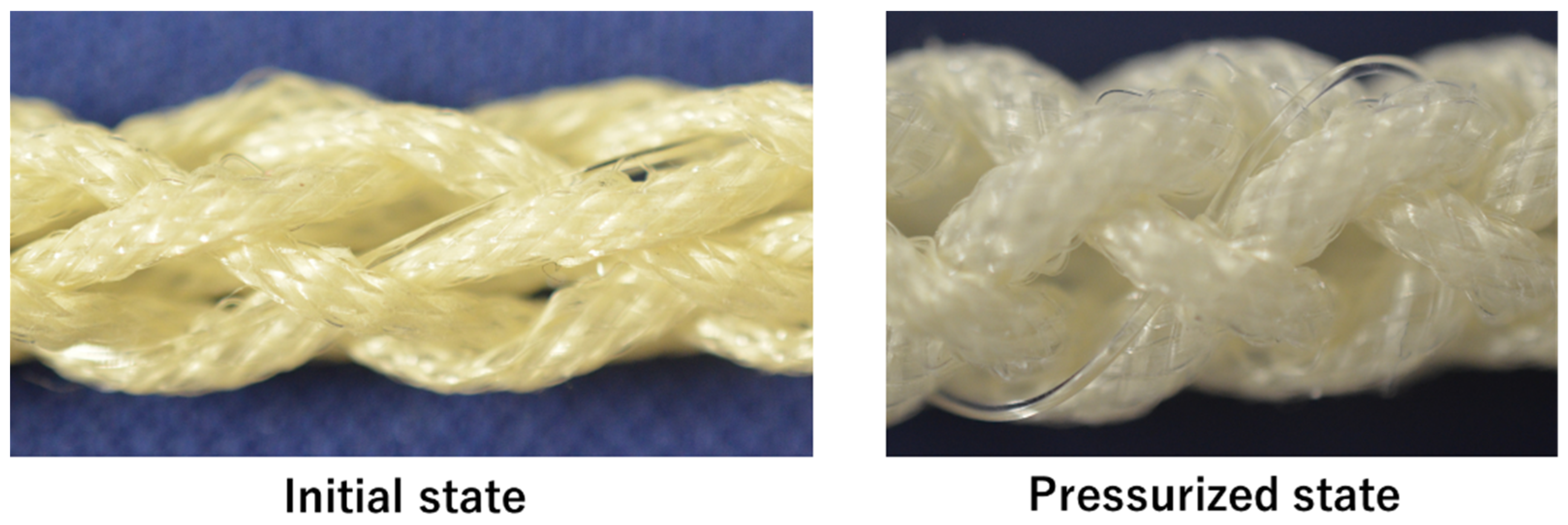
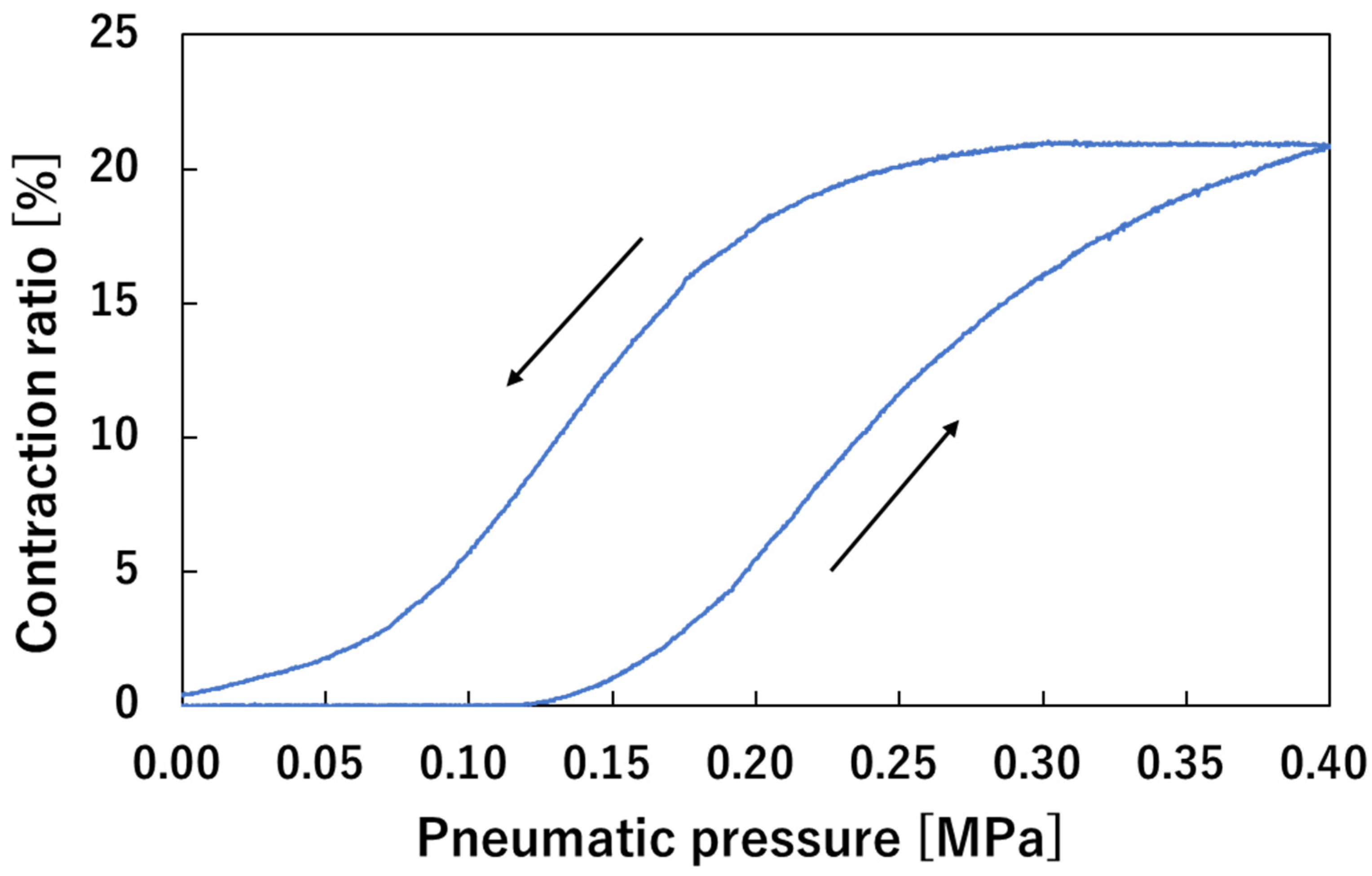
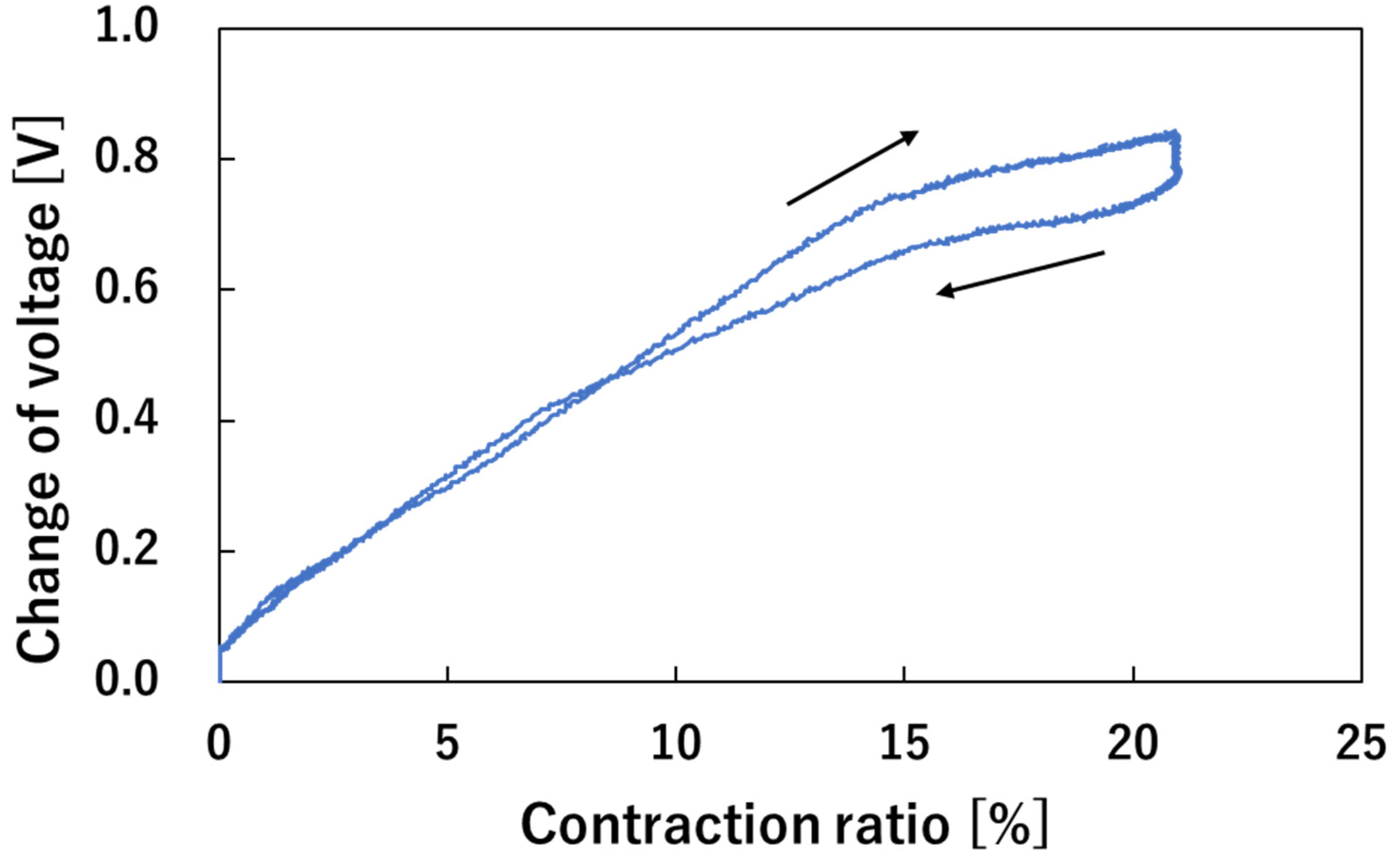
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Taniguchi, H.; Takemoto, N.; Yakami, R.; Wakimoto, S.; Oshikawa, T.; Morinaga, K.; Kanda, T. Realistic and Highly Functional Pediatric Externally Powered Prosthetic Hand Using Pneumatic Soft Actuators. J. Robot. Mechatron. 2020, 32, 1034–1043. [Google Scholar] [CrossRef]
- Takada, M.; Wakimoto, S.; Oshikawa, T.; Ueda, T.; Kanda, T. Active Cloth Fabricated by a Flat String Machine and its Application to a Safe Wheelchair System, Journal of Robotics and Mechatronics. J. Robot. Mechatron. 2020, 32, 1010–1018. [Google Scholar] [CrossRef]
- Li, W.; Nabae, H.; Endo, G.; Suzumori, K. New Soft Robot Hand Configuration with Combined Biotensegrity and Thin Artificial Muscle. IEEE Robot. Autom. Lett. 2020, 3, 4345–4351. [Google Scholar] [CrossRef]
- Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Design of Thin McKibben Muscle and Multifilament Structure. Sens. Actuators A Phys. 2017, 261, 66–74. [Google Scholar] [CrossRef]
- Koizumi, S.; Kurumaya, S.; Nabae, H.; Endo, G.; Suzumori, K. Braiding Thin McKibben Muscles to Enhance Their Contracting Abilities. IEEE Robot. Autom. Lett. 2018, 3, 3240–3246. [Google Scholar] [CrossRef]
- Tian, W.; Wakimoto, S.; Kanda, T.; Yamaguchi, D. Fabrication of “Active String” using Thin Artificial Muscles by String Production Process. In Proceedings of the Mechanical Engineering Congress (MECJ-21), Online, Japan, 5–8 September 2021; p. S117-05. (In Japanese). [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, W.; Wakimoto, S.; Nagaoka, K.; Yoshimoto, Y.; Kanda, T.; Yamaguchi, D. Displacement Sensing of an Active String Actuator by an Optical Fiber. Eng. Proc. 2021, 10, 35. https://doi.org/10.3390/ecsa-8-11310
Tian W, Wakimoto S, Nagaoka K, Yoshimoto Y, Kanda T, Yamaguchi D. Displacement Sensing of an Active String Actuator by an Optical Fiber. Engineering Proceedings. 2021; 10(1):35. https://doi.org/10.3390/ecsa-8-11310
Chicago/Turabian StyleTian, Weihang, Shuichi Wakimoto, Kazuya Nagaoka, Yorifumi Yoshimoto, Takefumi Kanda, and Daisuke Yamaguchi. 2021. "Displacement Sensing of an Active String Actuator by an Optical Fiber" Engineering Proceedings 10, no. 1: 35. https://doi.org/10.3390/ecsa-8-11310
APA StyleTian, W., Wakimoto, S., Nagaoka, K., Yoshimoto, Y., Kanda, T., & Yamaguchi, D. (2021). Displacement Sensing of an Active String Actuator by an Optical Fiber. Engineering Proceedings, 10(1), 35. https://doi.org/10.3390/ecsa-8-11310