
A BEM Adjoint-Based Differentiable Shape Optimization of a Stealth Aircraft


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Gradient-Based Optimization
1.2. The Boundary Element Method
1.3. Electromagnetic Gradient-Based Optimization
1.4. Contributions
2. RCS, BEM, and Adjoint Formulation
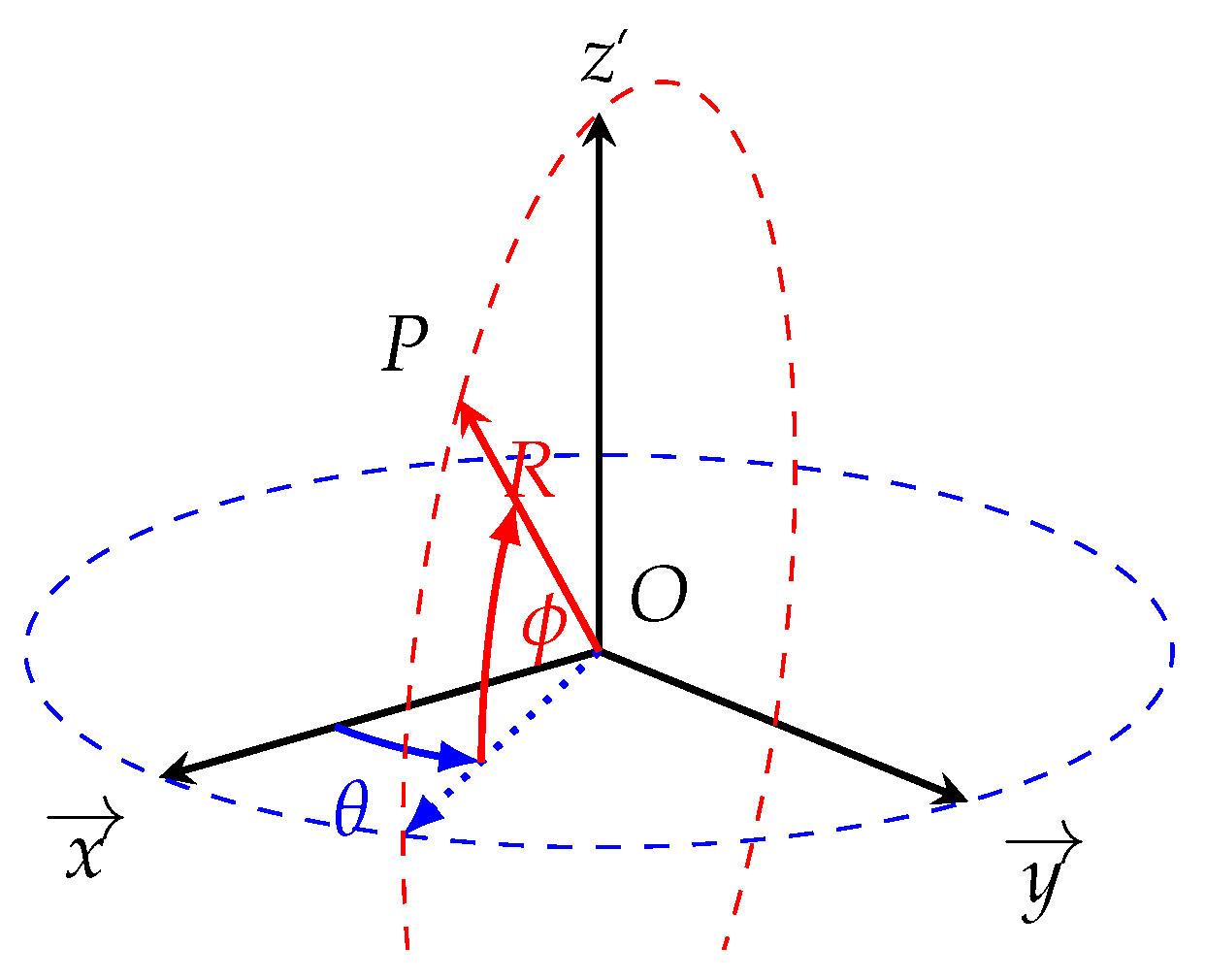
2.1. The Radar Cross-Section
2.2. Far Field
2.3. The Electric Field Integral Equation
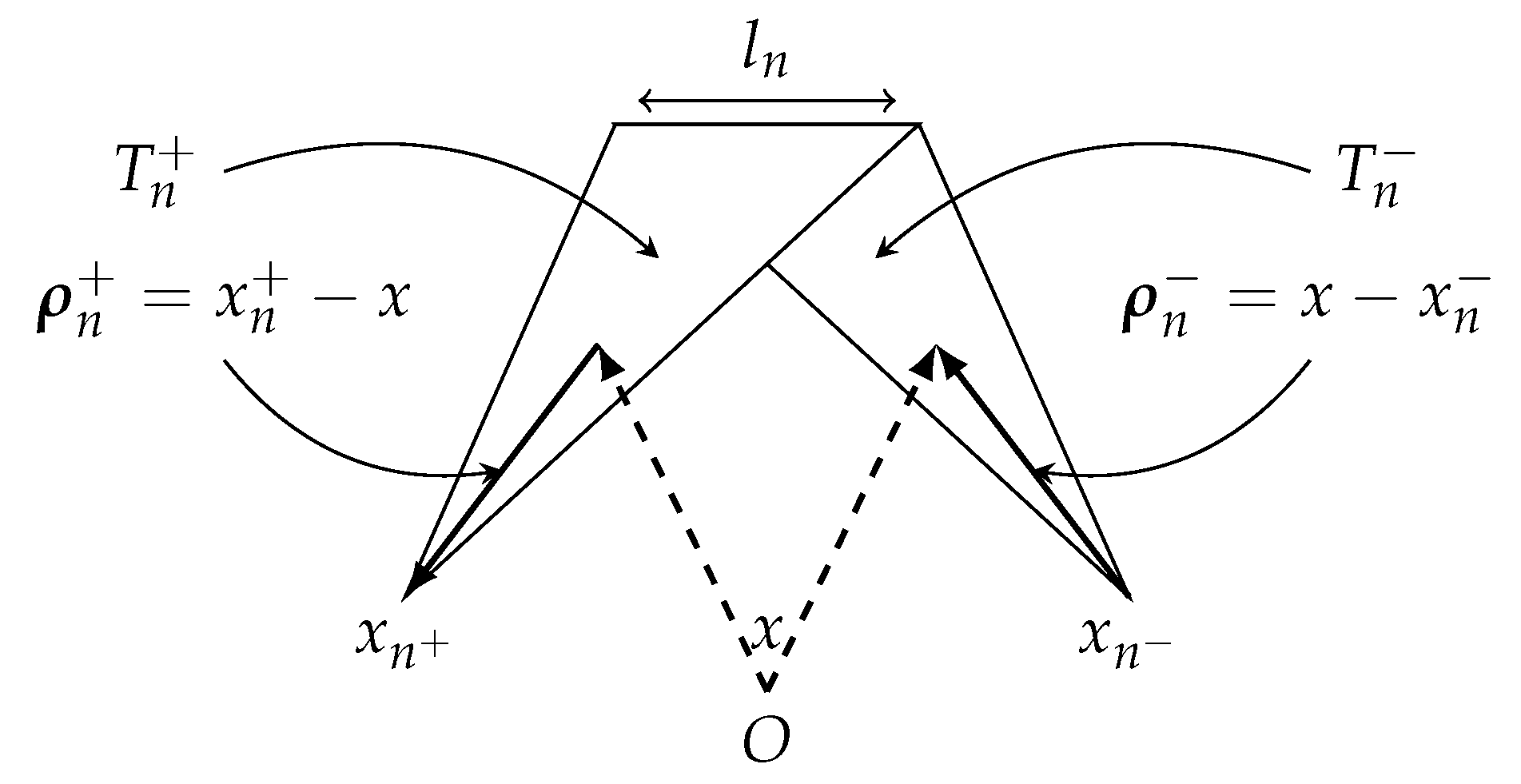
2.4. The Boundary Element Method
2.5. The Adjoint Formulation
2.5.1. Continuous Formulation
2.5.2. Discrete Formulation
2.6. Computation of the Gradient
2.7. In Practice
3. Optimization Methodology
3.1. The CAD Modeler
3.2. Computational Electromagnetism Solver
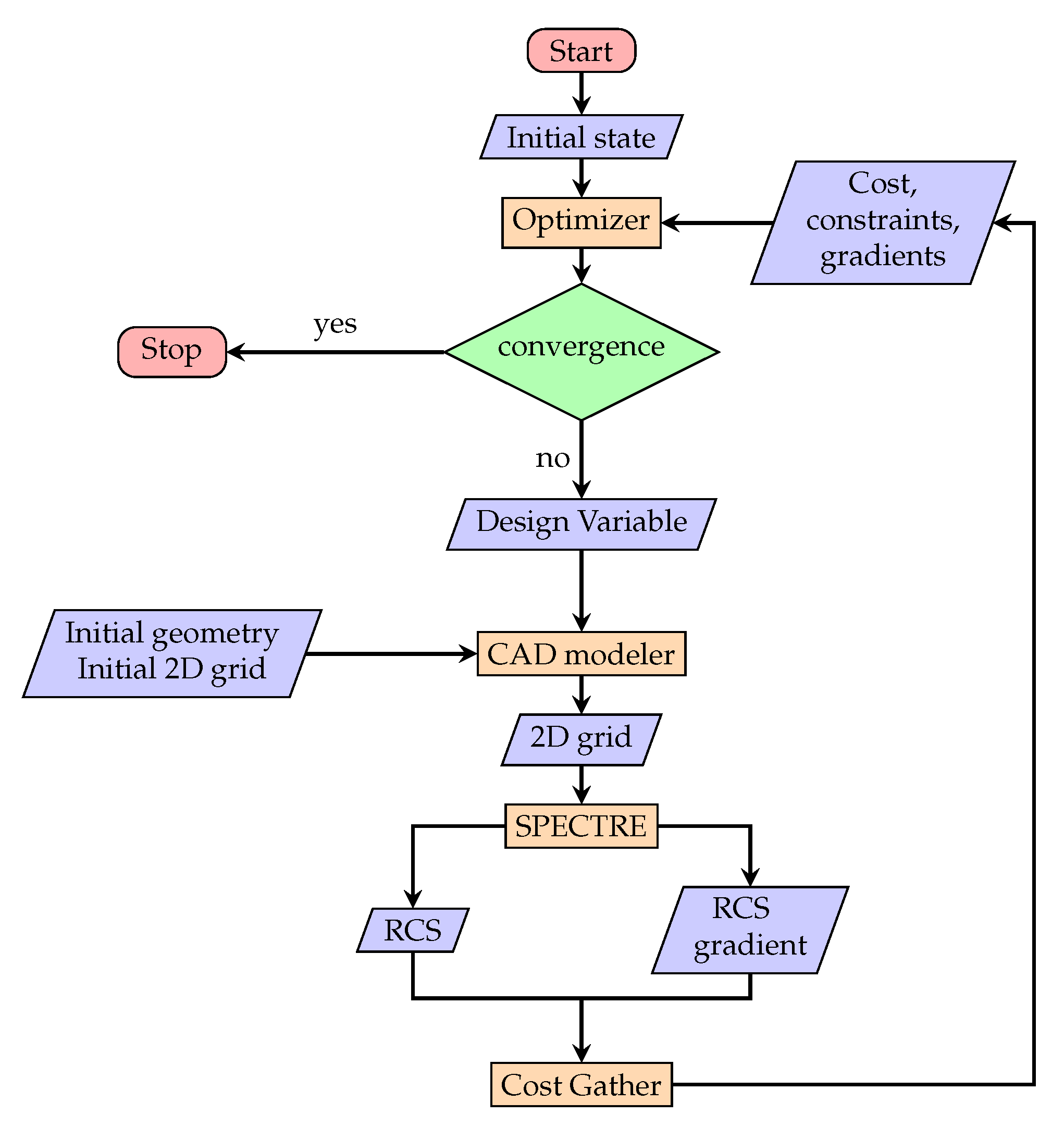
3.3. Optimization Process and Algorithm
4. Validation
4.1. Validation of the BEM Solver
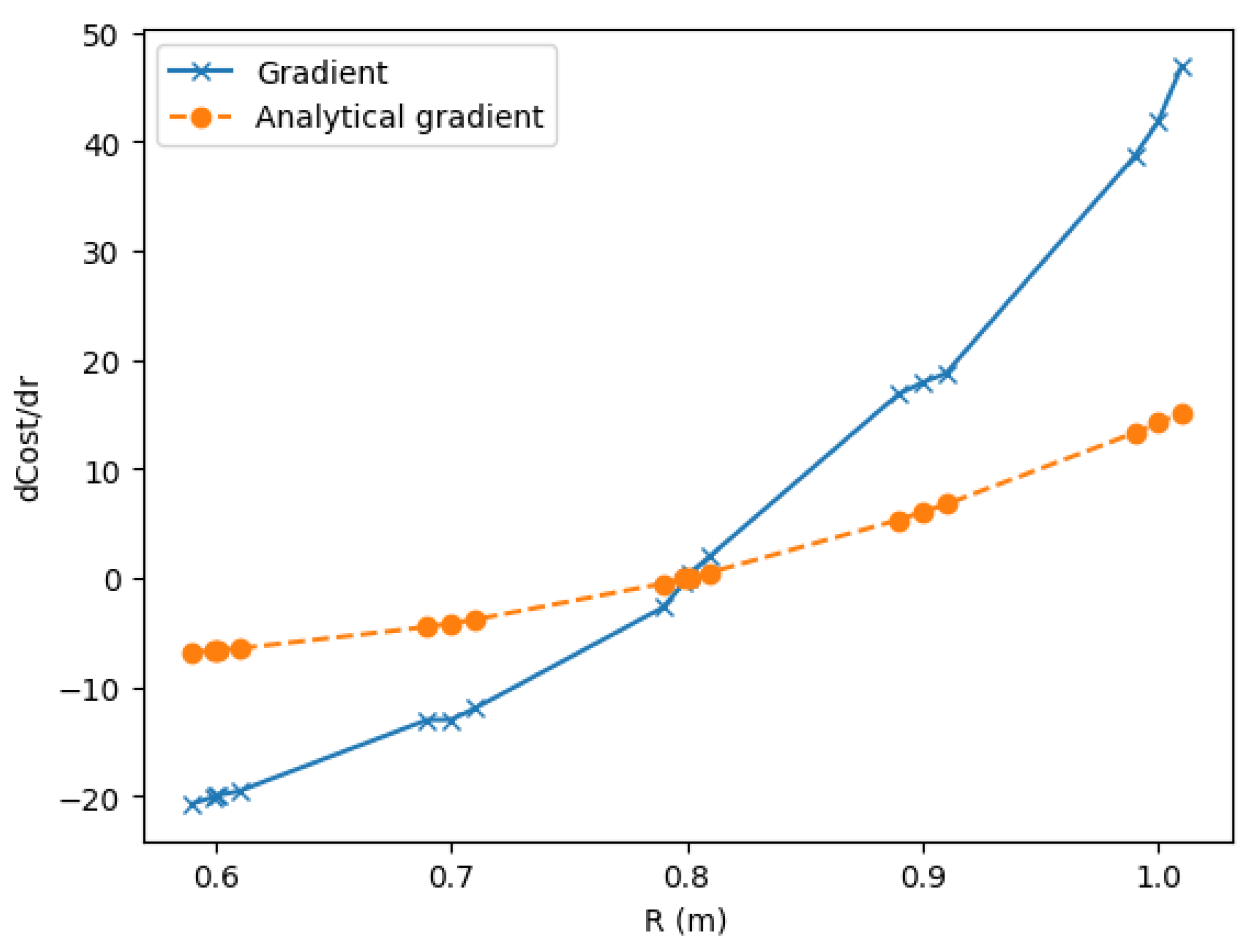
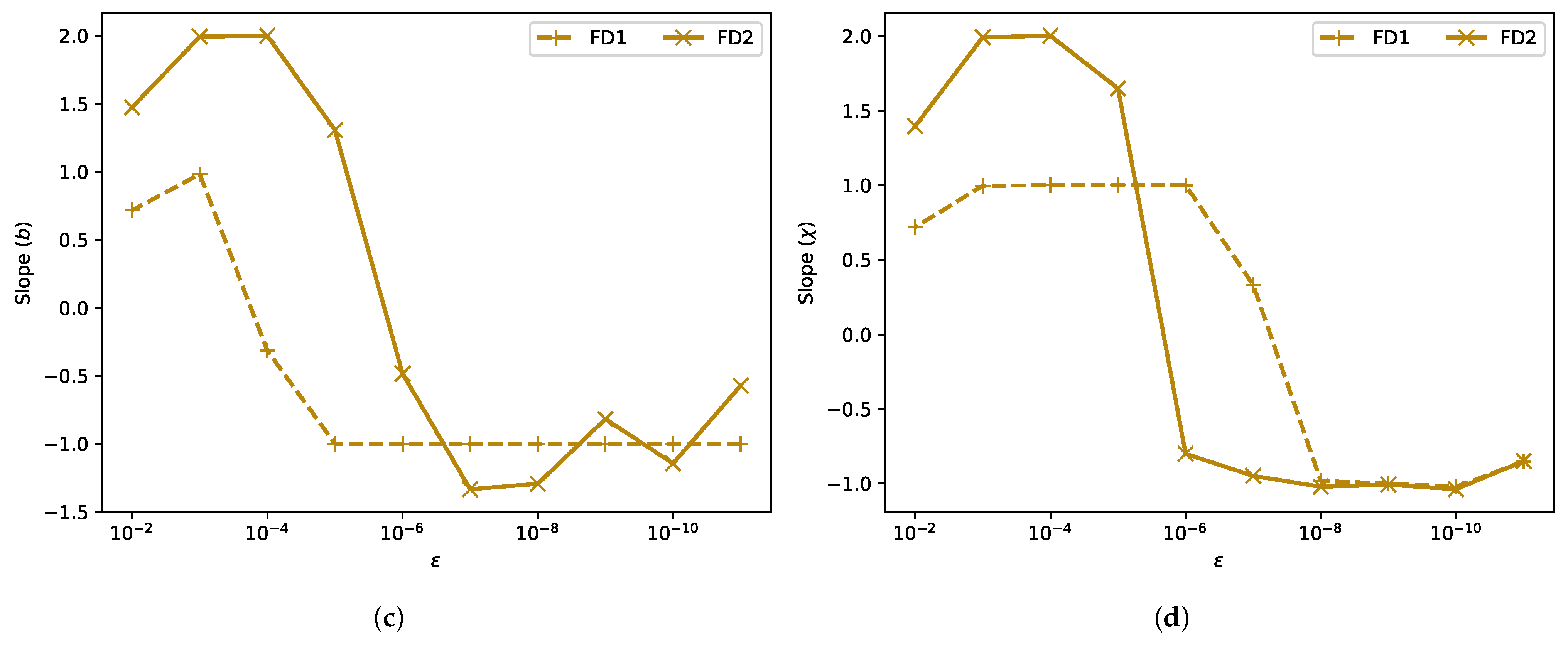
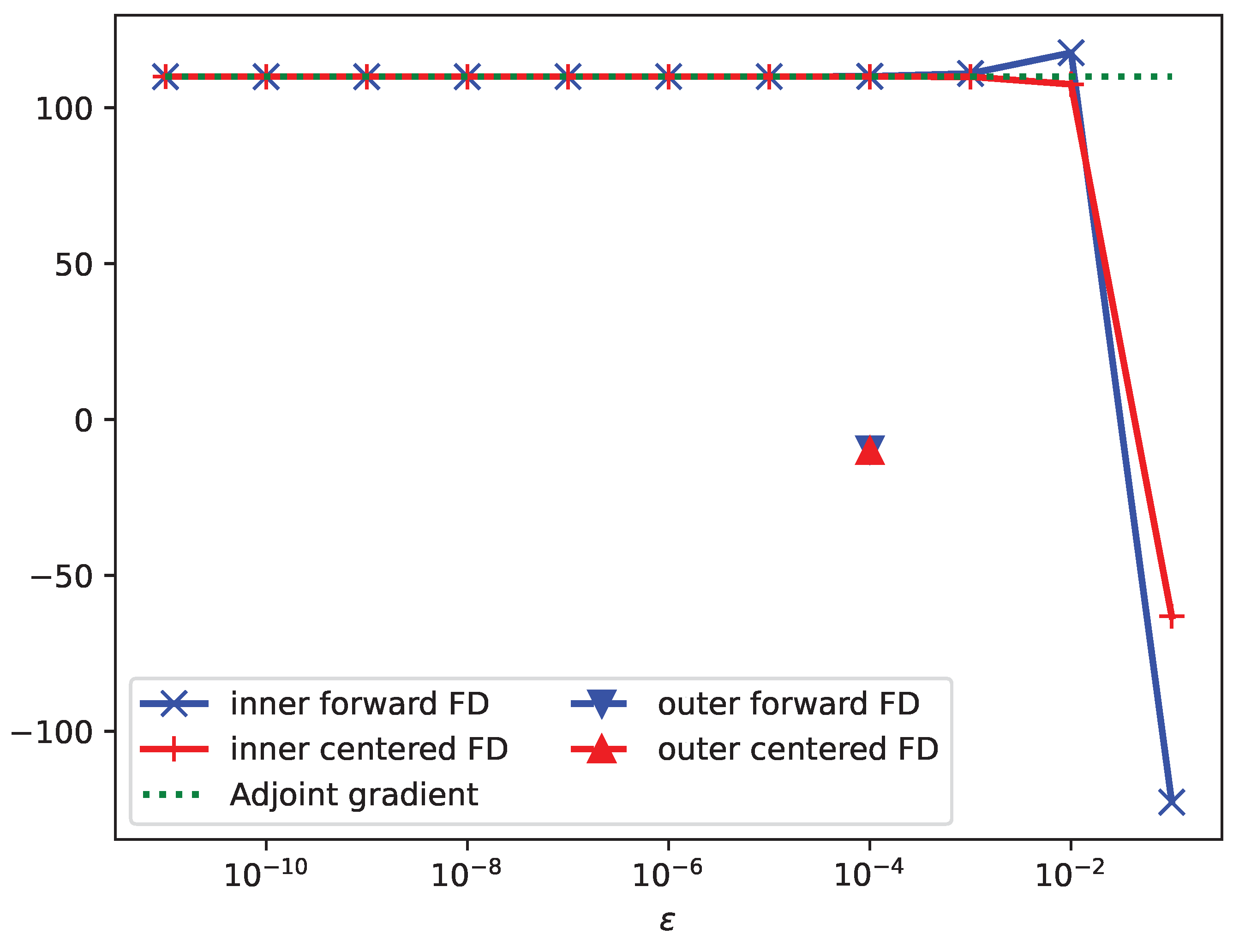
4.2. Validation of the Adjoint Gradients
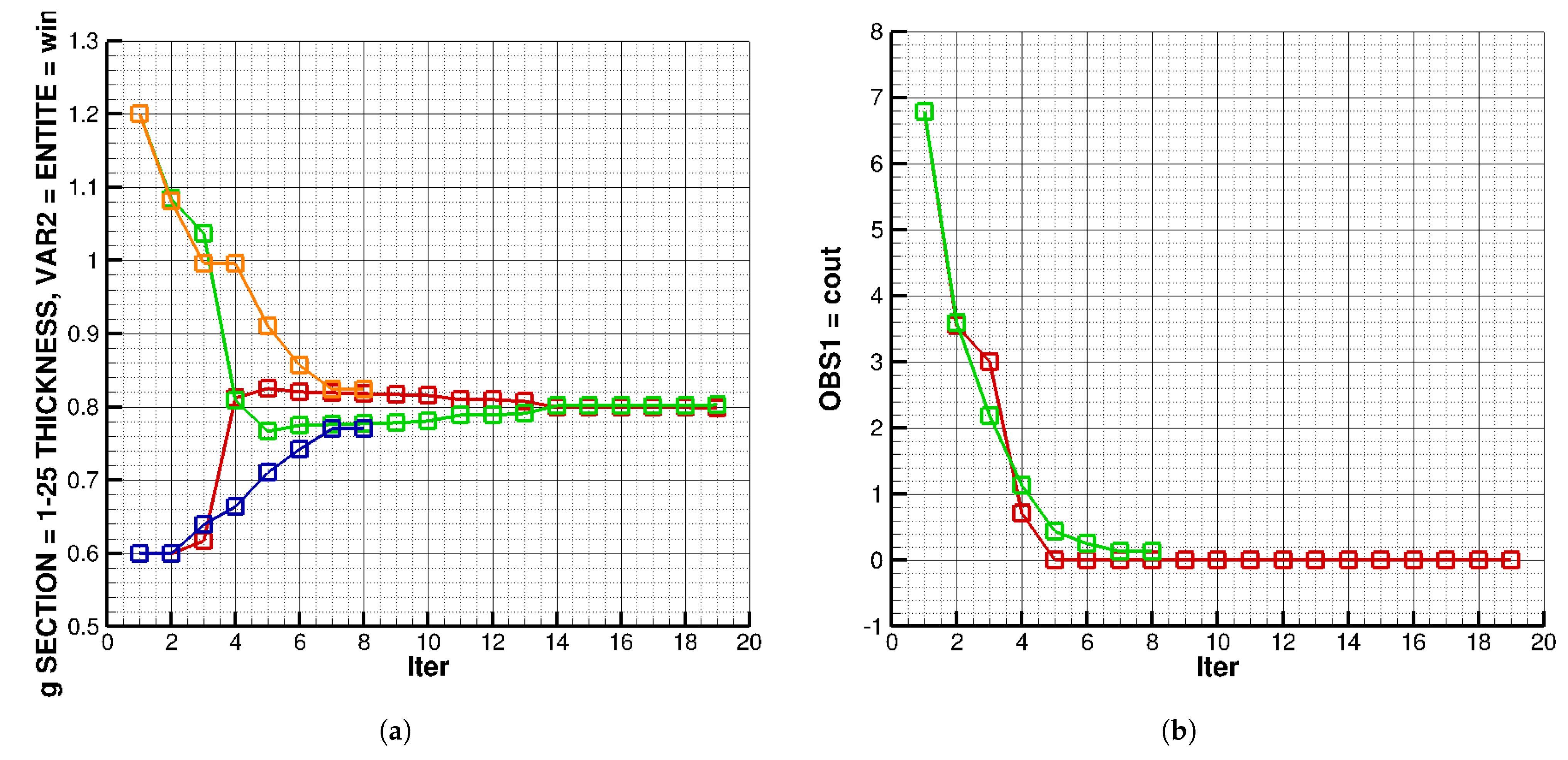
4.3. Ellipsoid Optimization (Two Variables)
5. Aircraft Shape Optimization
5.1. Case Presentation
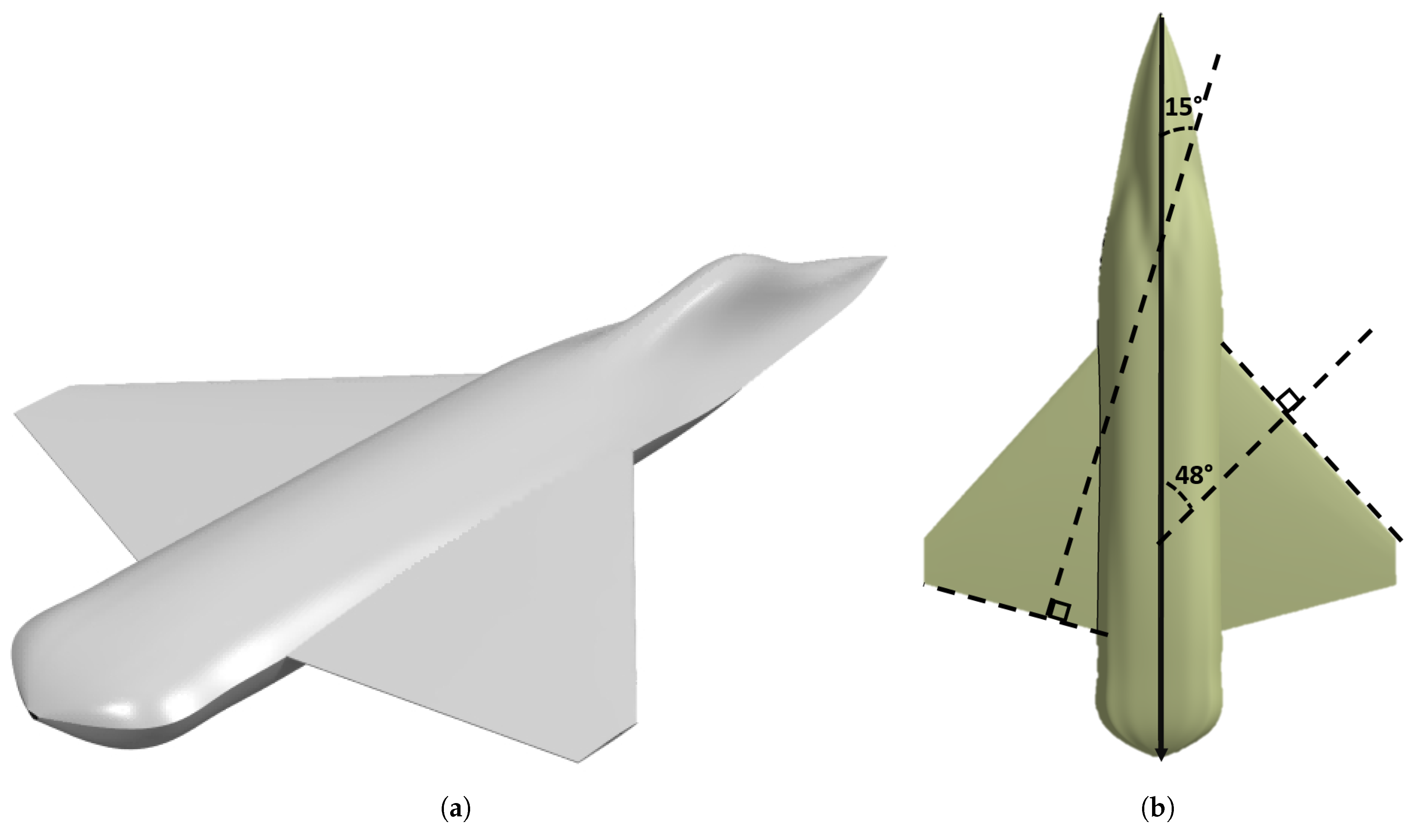
5.1.1. Baseline Description
5.1.2. Stealth Analysis of the Baseline
5.2. Optimization Parameters
- The leading edge sweep angle of sections S2 and S4;
- The chord of sections S2, S4, and S6;
- The distance between sections S2 and S6;
- The twist angle of sections S2, S3, S5, and S6,
- The leading edge camber of sections S3, S5, and S6.
5.3. Cost and Constraints
5.3.1. Criterion
Average over the Observation Window
Peak Directions
5.3.2. Constraints
5.4. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Electric field | |
| Magnetic field | |
| Density of electric current | |
| Potential associated to | |
| Density of electric charges | |
| Magnetic permeability of vacuum | |
| Absolute dielectric permittivity of vacuum | |
| Impedance of free space: | |
| Linear RCS () | |
| Decibel RCS | |
| Incident direction | |
| Observation direction | |
| j | |
| k | Wave number: |
References
- Knott, E.F.; Schaeffer, J.F.; Tulley, M.T. Radar Cross Section; SciTech Publishing: New York, NY, USA, 2004. [Google Scholar]
- Thoulon, C.; Roge, G.; Pironneau, O. Gradient-Based Aero-Stealth Optimization of a Simplified Aircraft. Fluids 2024, 9, 174. [Google Scholar] [CrossRef]
- Parr, J.; Holden, C.M.; Forrester, A.I.; Keane, A.J. Review of Efficient Surrogate Infill Sampling Criteria with Constraint Handling. 2010. Available online: https://eprints.soton.ac.uk/336169/ (accessed on 28 April 2025).
- Lyu, Z.; Xu, Z.; Martins, J. Benchmarking optimization algorithms for wing aerodynamic design optimization. In Proceedings of the 8th International Conference on Computational Fluid Dynamics, Chengdu, China, 14–18 July 2014; Volume 11, p. 585. [Google Scholar]
- Martin, L. Conception Aérodynamique Robuste. Ph.D. Thesis, Université de Toulouse, Université Toulouse III-Paul Sabatier, Toulouse, France, 2010. [Google Scholar]
- Hascoët, L.; Pascual, V. The Tapenade Automatic Differentiation tool: Principles, Model, and Specification. ACM Trans. Math. Softw. 2013, 39, 1–43. [Google Scholar] [CrossRef]
- Davidson, D.B. Computational Electromagnetics for RF and Microwave Engineering. In Chapter 1: An Overview of Computational Electromagnetics; Cambridge University Press: Cambridge, UK, 2010; pp. 1–10. [Google Scholar]
- Bardos, C.; Roge, G. Maîtrise du champ rétrodiffusé par une méthode de contrôle optimal. In Proceedings of the Séminaire de l’École Normale Supérieure, Paris, France, 20 January 1995. [Google Scholar]
- Lions, J.L.; Lelong, P. Contrôle Optimal de Systèmes Gouvernés par des Équations aux Dérivées Partielles. 1968. Available online: https://cir.nii.ac.jp/crid/1130000795441759872 (accessed on 28 April 2025).
- Paoli, J. Contrôle Optimal du Champ Rétrodiffusé et Optimisation Sous Contraintes. PhD. Thesis, Cachan, Ecole Normale Supérieure, Gif-sur-Yvette, France, 2001. [Google Scholar]
- Roge, G. Quelques applications de la Théorie du Contrôle de Jacques-Louis Lions chez Dassault Aviation. In Proceedings of the Journée Calcul Scientifique et Applications Technologiques, Paris, France, 27 November 2003. [Google Scholar]
- Georgieva, N.K.; Glavic, S.; Bakr, M.H.; Bandler, J.W. Feasible adjoint sensitivity technique for EM design optimization. IEEE Trans. Microw. Theory Tech. 2002, 50, 2751–2758. [Google Scholar] [CrossRef]
- Nikolova, N.K.; Safian, R.; Soliman, E.A.; Bakr, M.H.; Bandler, J.W. Accelerated gradient based optimization using adjoint sensitivities. IEEE Trans. Antennas Propag. 2004, 52, 2147–2157. [Google Scholar] [CrossRef]
- Wang, L.; Anderson, W.K. Adjoint-based shape optimization for electromagnetic problems using discontinuous Galerkin methods. AIAA J. 2011, 49, 1302–1305. [Google Scholar] [CrossRef]
- Zhou, L.; Huang, J.; Gao, Z. Radar Cross Section Gradient Calculation Based on Adjoint Equation of Method of Moment. In Proceedings of the 2018 Asia-Pacific International Symposium on Aerospace Technology (APISAT 2018), Chengdu, China, 16–18 October 2018; Zhang, X., Ed.; Springer: Singapore, 2019; pp. 1427–1445. [Google Scholar]
- Cheng, S.; Wang, F.; Wu, G.; Zhang, C. A semi-analytical and boundary-type meshless method with adjoint variable formulation for acoustic design sensitivity analysis. Appl. Math. Lett. 2022, 131, 108068. [Google Scholar] [CrossRef]
- Lan, L.; Zhou, Z.; Liu, H.; Wei, X.; Wang, F. An ACA-BM-SBM for 2D acoustic sensitivity analysis. AIMS Math. 2024, 9, 1939–1958. [Google Scholar] [CrossRef]
- Liu, H.; Wang, F.; Cheng, S.; Qiu, L.; Gong, Y. Shape optimization of sound barriers using an isogeometric meshless method. Phys. Fluids 2024, 36, 027116. [Google Scholar] [CrossRef]
- Chen, W. Singular boundary method: A novel, simple, meshfree, boundary collocation numerical method. Chin. J. Solid Mech. 2009, 30, 592–599. [Google Scholar]
- Wei, X.; Sun, L. Singular boundary method for 3D time-harmonic electromagnetic scattering problems. Appl. Math. Model. 2019, 76, 617–631. [Google Scholar] [CrossRef]
- Bendali, A. Equations Intégrales en Électromagnétisme. Cours BEM INSA Toulouse. 2013. Available online: https://www.math.univ-toulouse.fr/~abendali/polyelec1314.pdf (accessed on 28 April 2025).
- Stratton, J.A.; Chu, L. Diffraction theory of electromagnetic waves. Phys. Rev. 1939, 56, 99. [Google Scholar] [CrossRef]
- Rao, S.; Wilton, D.; Glisson, A. Electromagnetic scattering by surfaces of arbitrary shape. IEEE Trans. Antennas Propag. 1982, 30, 409–418. [Google Scholar] [CrossRef]
- Kleinveld, S.; Rogé, G.; Daumas, L.; Dinh, Q. Differentiated parametric CAD used within the context of automatic aerodynamic design optimization. In Proceedings of the 12th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Victoria, BC, Canada, 10–12 September 2008; p. 5952. [Google Scholar]
- Shannon, C. Communication in the Presence of Noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Poggio, A.J.; Miller, E.K. Integral Equation Solutions of Three-Dimensional Scattering Problems; MB Associate: San Ramon, CA, USA, 1970; Chapter 4; pp. 195–264. [Google Scholar]
- Carayol, Q. Développement et Analyse D’une Méthode Multipôle Multiniveau pour L’électromagnétisme. Ph.D. Thesis, Université Paris 6, Paris, France, 2002. Available online: https://theses.fr/2002PA066485 (accessed on 28 April 2025).
- Young, R.C. Application of a Floating Point Systems AP190L Array Processor to Finite Element Analysis; General Atomics: San Diego, CA, USA, 1982. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Large-Scale Unconstrained Optimization; Springer: Boston, MA, USA, 2006; pp. 164–192. [Google Scholar]
- Jenn, D. Radar and Laser Cross Section Engineering; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2005. [Google Scholar]
- Jakobus, U.; Landstorfer, F.M. Improved PO-MM hybrid formulation for scattering from three-dimensional perfectly conducting bodies of arbitrary shape. IEEE Trans. Antennas Propag. 2002, 43, 162–169. [Google Scholar] [CrossRef]
- Jakobus, U.; Landstorfer, F.M. Improvement of the PO-MoM hybrid method by accounting for effects of perfectly conducting wedges. IEEE Trans. Antennas Propag. 2002, 43, 1123–1129. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thoulon, C.; Roge, G.; Pironneau, O. A BEM Adjoint-Based Differentiable Shape Optimization of a Stealth Aircraft. Eng 2025, 6, 147. https://doi.org/10.3390/eng6070147
Thoulon C, Roge G, Pironneau O. A BEM Adjoint-Based Differentiable Shape Optimization of a Stealth Aircraft. Eng. 2025; 6(7):147. https://doi.org/10.3390/eng6070147
Chicago/Turabian StyleThoulon, Charles, Gilbert Roge, and Olivier Pironneau. 2025. "A BEM Adjoint-Based Differentiable Shape Optimization of a Stealth Aircraft" Eng 6, no. 7: 147. https://doi.org/10.3390/eng6070147
APA StyleThoulon, C., Roge, G., & Pironneau, O. (2025). A BEM Adjoint-Based Differentiable Shape Optimization of a Stealth Aircraft. Eng, 6(7), 147. https://doi.org/10.3390/eng6070147