
Use of Fibre-Optic Sensors for Pipe Condition and Hydraulics Measurements: A Review


Abstract
:1. Introduction
1.1. Direct Methods
1.1.1. Visual Inspection
1.1.2. Acoustic and Ultrasonic Methods
1.1.3. Electromagnetic Methods
1.1.4. Radiographic Methods
1.1.5. Thermography Methods
1.2. Indirect Methods
1.2.1. Soil Characterisation
1.2.2. Linear Polarisation Resistance (LPR) of Soil
1.2.3. Pipe to Soil Potential Survey
1.3. The Case for a New Method
2. Principles of Fibre-Optic Sensing
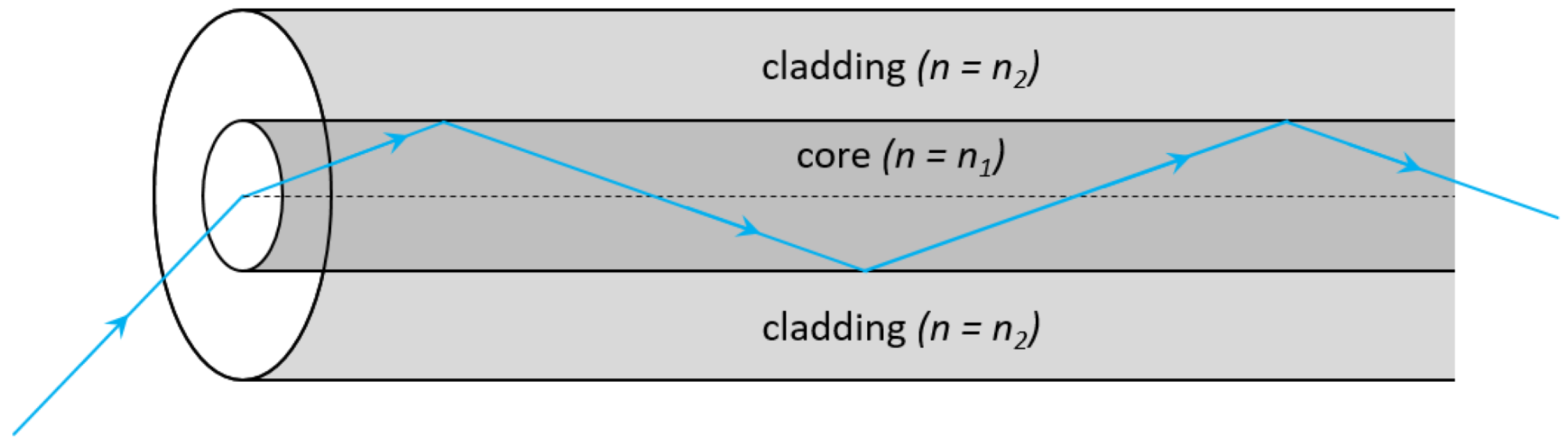
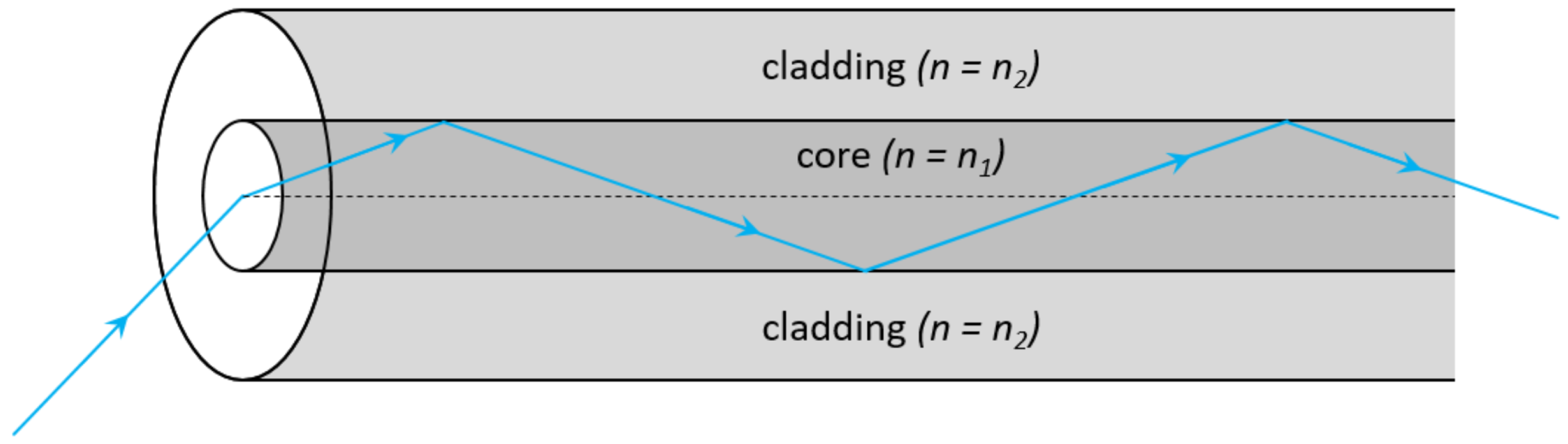
2.1. Fundamentals of Fibre Optics
2.2. Fibre-Optic Sensors
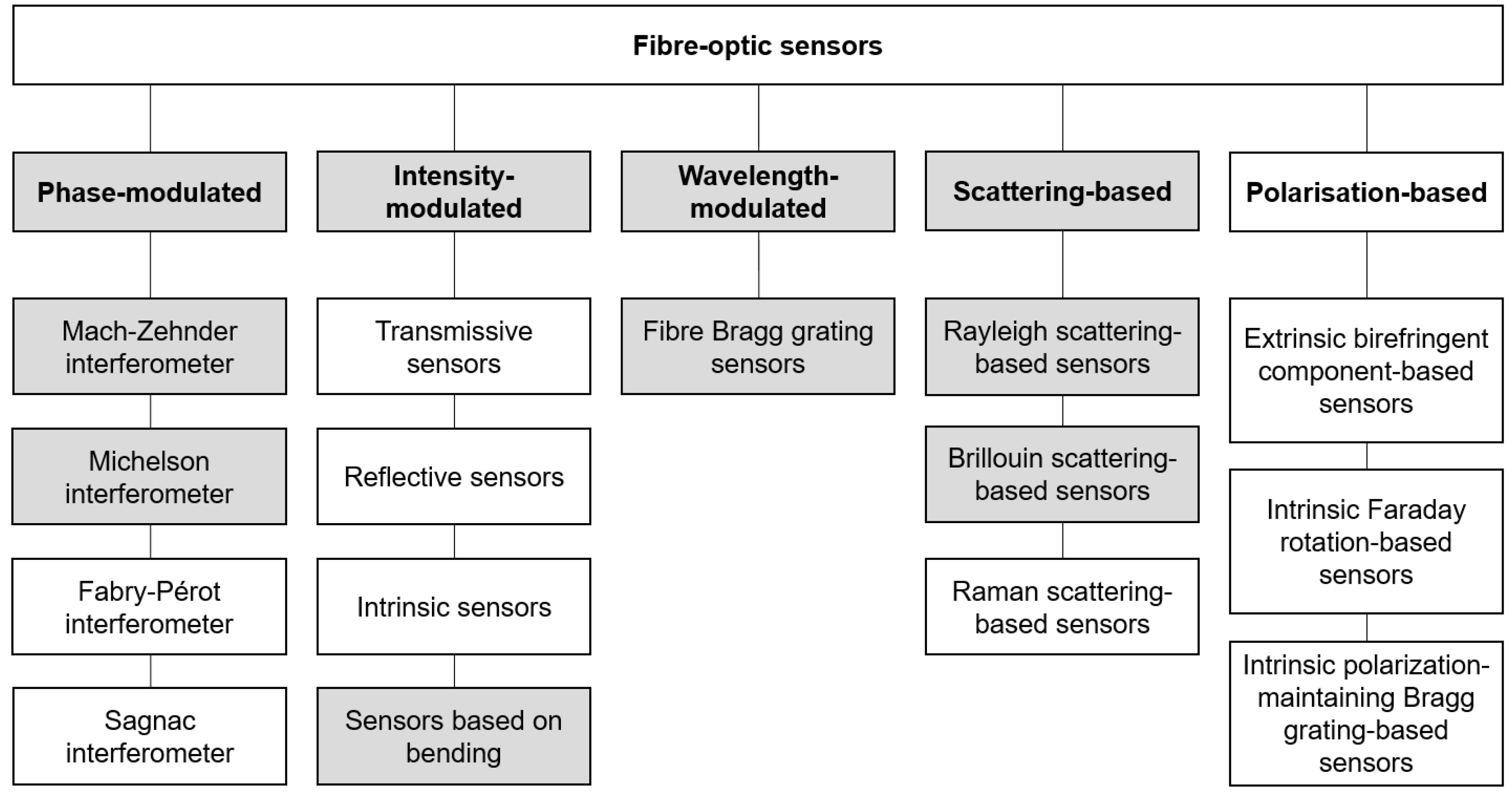
2.2.1. Types of Fibre-Optic Sensors
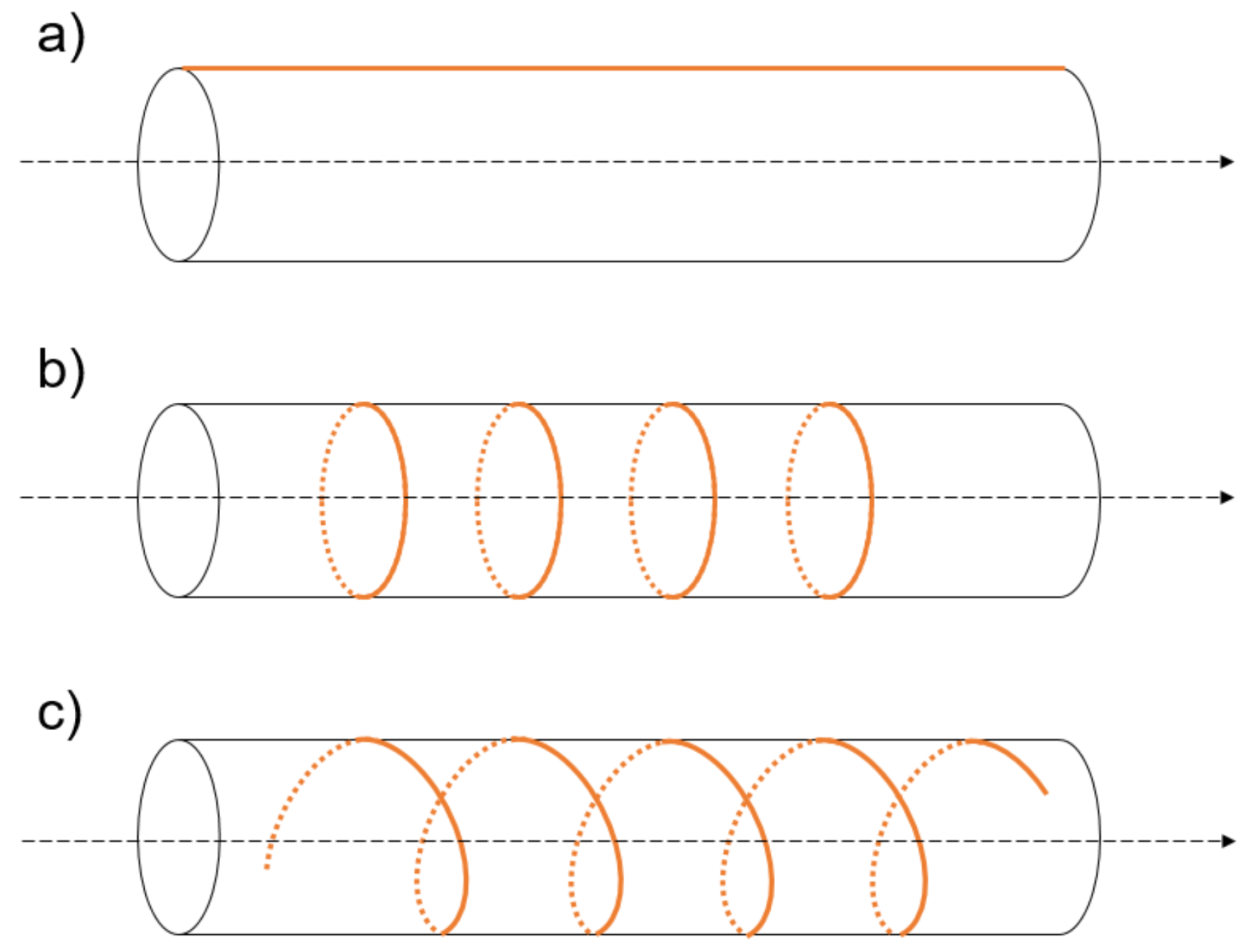
2.2.2. Geometry of Fibre-Optic Sensors
2.3. Parameters of Fibre-Optic Sensors
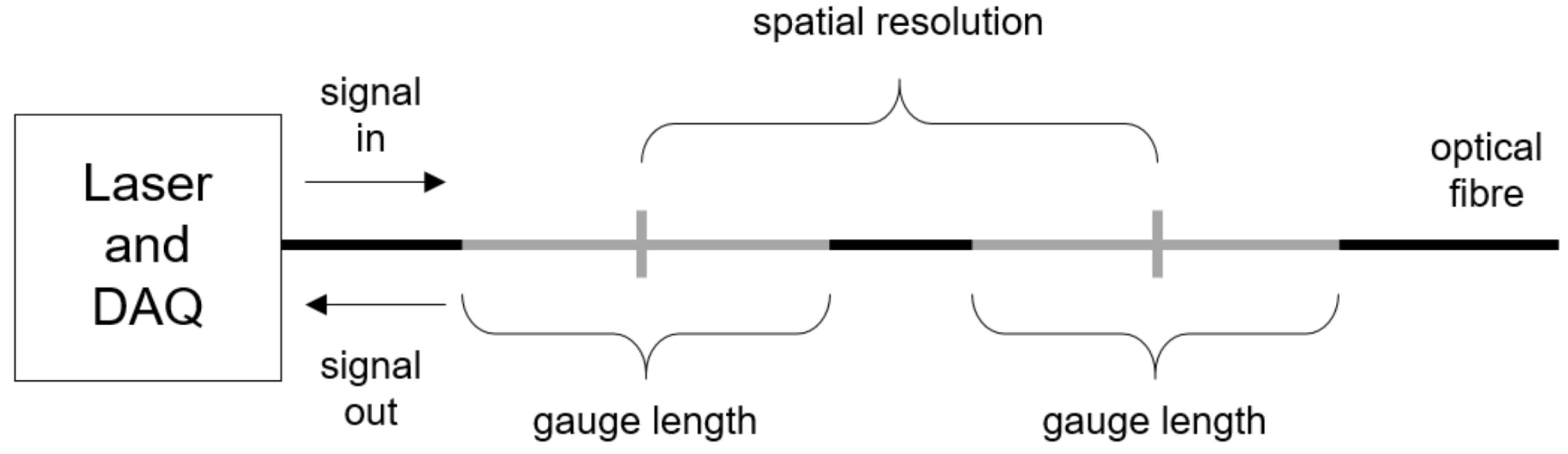
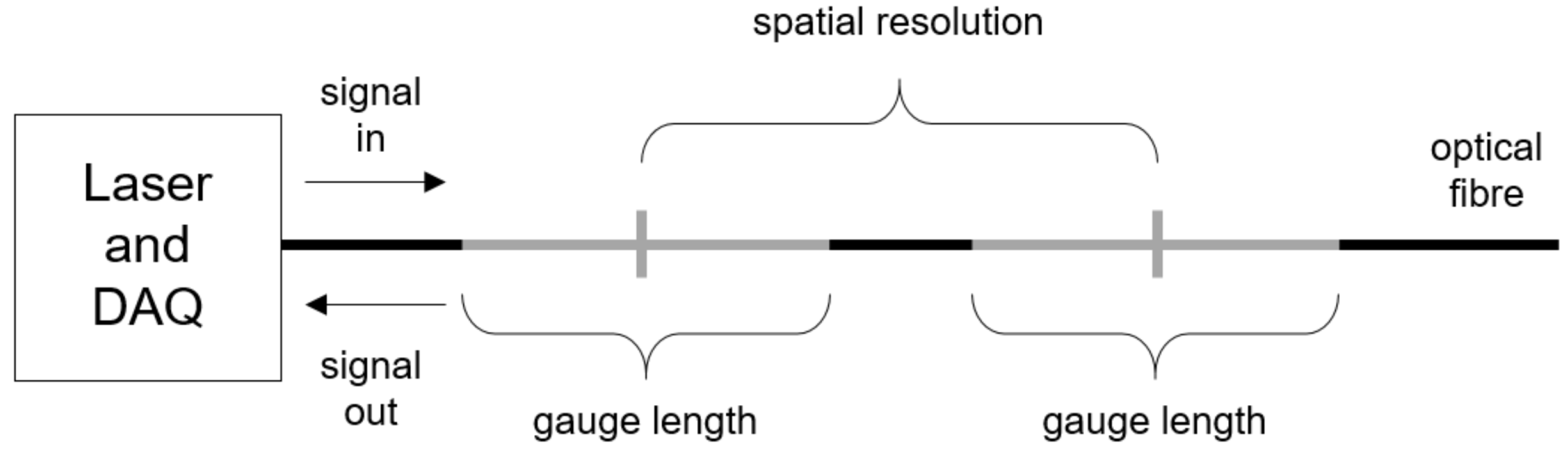
2.3.1. Spatial Resolution
2.3.2. Gauge Length
3. Hydraulic Applications
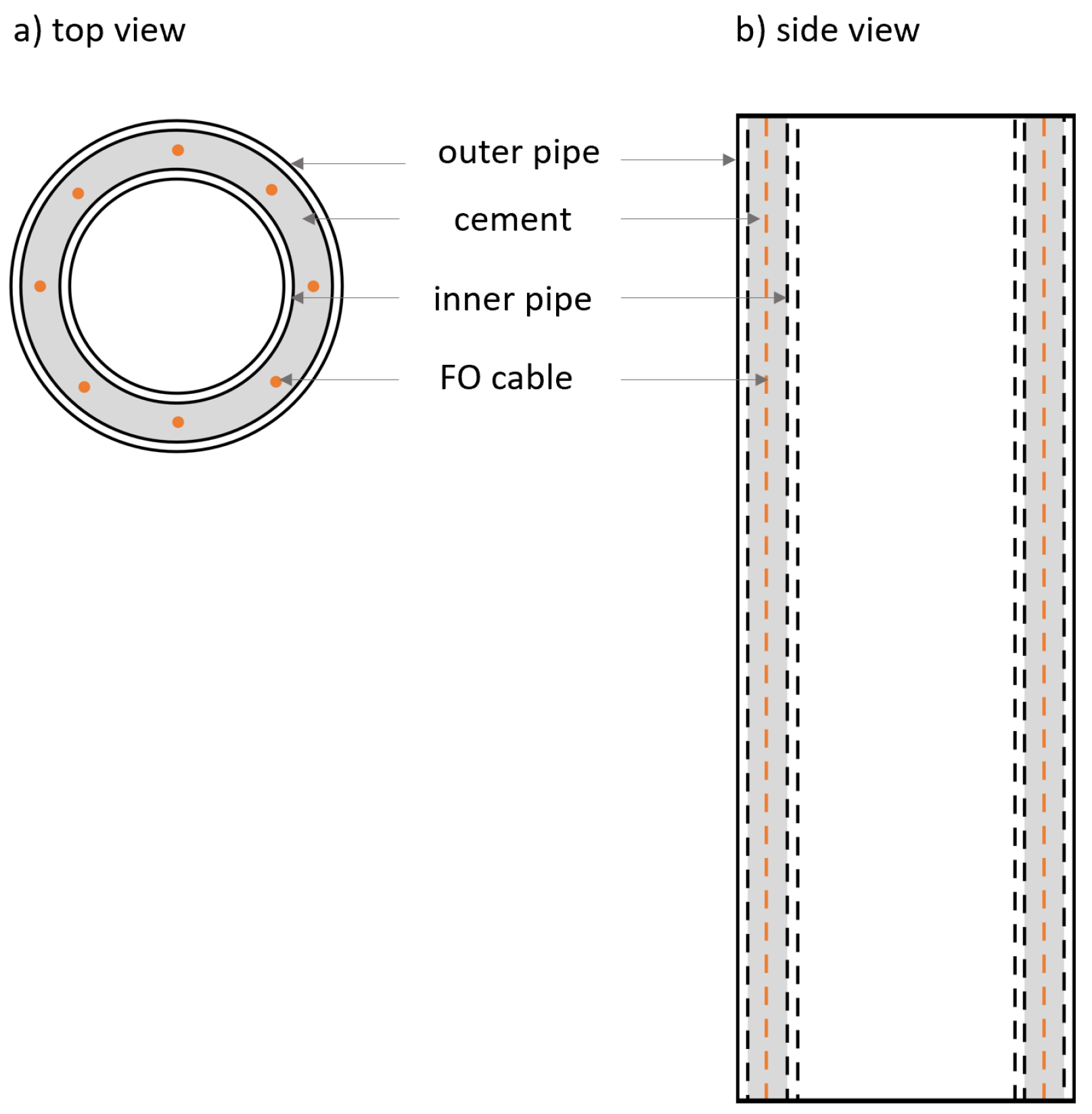
3.1. Condition Monitoring
3.2. Leak Detection
3.3. Measurement of Flow Parameters
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BOCDA | Brillouin optical correlation-domain analysis |
| BOTDA | Brillouin optical time-domain analysis |
| BOTDR | Brillouin optical time-domain reflectometry |
| BP | back propagation |
| CF | carbon fibre |
| COTDR | correlation optical time-domain reflectometry |
| DAQ | data acquisition system |
| DAS | distributed acoustic sensing |
| DBS | distributed Brillouin sensing |
| DITEST | distributed temperature and strain sensor |
| DSS | distributed strain sensing |
| DTS | distributed temperature sensing |
| DVS | distributed vibration sensing |
| EPA | Environmental Protection Agency |
| FBG | fibre Bragg grating |
| FIMT | fibre in metal tube |
| FOS | fibre-optic sensor |
| HDPE | high-density polyethylene |
| LMZI | loop integrated Mach–Zehnder interferometer |
| LS-SVM | least-squares support-vector machine |
| LVDT | linear variable displacement transducer |
| NA | numerical aperture |
| OBR | optical backscatter reflectometer |
| OFDR | optical frequency-domain reflectometry |
| OTDR | optical time-domain reflectometry |
| PDT | power and data transmission |
| PE | polyethylene |
| PIG | pipeline inspection gauge |
| POTDR | polarisation optical time-domain reflectometry |
| PVC | polyvinyl chloride |
| RTCI | Real-Time Compaction Imager |
| SHM | structural health monitoring |
| SNR | signal-to-noise ratio |
| TIR | total internal reflection |
| US | United States |
| -OTDR | phase optical time-domain reflectometry |
References
- McMahon, W.; Evans, M.; Burtwell, M.; Parker, J. Minimising Street Works Disruption: The Real Costs of Street Works to the Utility Industry and Society; Technical Report UKWIR Report 05/WM/12/8; UKWIR: London, UK, 2006. [Google Scholar]
- Department for International Trade. Water and Treated Water. 2015. Available online: https://www.gov.uk/government/publications/water-and-treated-water/water-and-treated-water (accessed on 28 September 2021).
- Metje, N.; Atkins, P.; Brennan, M.; Chapman, D.; Lim, H.; Machell, J.; Muggleton, J.; Pennock, S.; Ratcliffe, J.; Redfern, M.; et al. Mapping the Underworld-State-of-the-Art Review. Tunn. Undergr. Space Technol. 2007, 22, 568–586. [Google Scholar] [CrossRef]
- Environment Agency. The State of the Environment: Water Resources; Technical Report; Environment Agency: Bristol, UK, 2018.
- US Environmental Protection Agency. Innovation and Research for Water Infrastructure for the 21st Century: Research Plan; Technical Report Report No. EPA-ORD-NRMRL-CI-08-03-02; Environment Agency: Washington, DC, USA, 2007.
- Liu, Z.; Kleiner, Y. State of the Art Review of Inspection Technologies for Condition Assessment of Water Pipes. Measurement 2013, 46, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Rizzo, P. Water and Wastewater Pipe Nondestructive Evaluation and Health Monitoring: A Review. Adv. Civ. Eng. 2010, 2010, 818597. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Safari, A.; Niu, X.; Drinkwater, B.; Horoshenkov, K.V. Acoustic and ultrasonic techniques for defect detection and condition monitoring in water and sewerage pipes: A review. Appl. Acoust. 2021, 183, 108282. [Google Scholar] [CrossRef]
- Creaform3D. Portable & Robot Mounted 3D Scanners and CMM Solutions. 2021. Available online: https://www.creaform3d.com/en (accessed on 20 September 2021).
- Hunaidi, O.; Wang, A.; Bracken, M.; Gambino, T.; Fricke, C. Acoustic Methods for Locating Leaks in Municipal Water Pipe Networks; Technical Report; National Research Council Canada: Ottawa, ON, Canada, 2004.
- SmartBall. SmartBall—Leak and Gas Pocket Detection—Pure Technologies. 2021. Available online: https://puretechltd.com/technology/smartball-leak-detection (accessed on 21 September 2021).
- Sahara. Sahara—Leak and Gas Pocket Detection—Pure Technologies. 2021. Available online: https://puretechltd.com/technology/sahara-leak-gas-pocket-detection (accessed on 21 September 2021).
- SewerBatt. Acoustic Sensing Technology (UK) Ltd.—SewerBatt™. 2021. Available online: http://acousticsensing.co.uk (accessed on 20 September 2021).
- Bosch, J.; Hugger, A.; Franz, J.; Falter, S.; Oberdörfer, Y. Phase Array Technology for Automated Pipeline Inspection. In Proceedings of the 16th World Conference on NDT (WCNDT 2004), Montreal, QC, Canada, 30 August–3 September 2004. [Google Scholar]
- Marlow, D.; Heart, S.; Burn, S.; Urquhart, A.; Gould, S.; Anderson, M.; Cook, S.; Ambrose, M.; Madin, B.; Fitzgerald, A. Condition Assessment Strategies and Protocols for Water and Wastewater Utility Assets; Technical Report; Water Environment Research Foundation: Alexandria, VA, USA, 2007. [Google Scholar]
- Agrawal, G.P. Fiber-Optic Communication Systems; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Li, H.N.; Li, D.S.; Song, G.B. Recent Applications of Fiber Optic Sensors to Health Monitoring in Civil Engineering. Eng. Struct. 2004, 26, 1647–1657. [Google Scholar] [CrossRef]
- Ferdinand, P. The Evolution of Optical Fiber Sensors Technologies During the 35 Last Years and Their Applications in Structure Health Monitoring. In Proceedings of the 7th European Workshop on Structural Health Monitoring (EWSHM), Nantes, France, 8–11 July 2014; pp. 914–929. [Google Scholar]
- Lu, P.; Lalam, N.; Badar, M.; Liu, B.; Chorpening, B.T.; Buric, M.P.; Ohodnicki, P.R. Distributed Optical Fiber Sensing: Review and Perspective. Appl. Phys. Rev. 2019, 6, 041302. [Google Scholar] [CrossRef]
- Baldwin, C.S. Brief History of Fiber Optic Sensing in the Oil Field Industry. In SPIE Sensing Technology + Applications; Du, H.H., Pickrell, G., Udd, E., Baldwin, C.S., Benterou, J.J., Wang, A., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2014; p. 909803. [Google Scholar] [CrossRef]
- Tanimola, F.; Hill, D. Distributed Fibre Optic Sensors for Pipeline Protection. J. Nat. Gas Sci. Eng. 2009, 1, 134–143. [Google Scholar] [CrossRef]
- Maiman, T.H. Stimulated Optical Radiation in Ruby. Nature 1960, 187, 493–494. [Google Scholar] [CrossRef]
- Kao, K.C. Dielectric-Fibre Surface Waveguides for Optical Frequencies. Proc. IEE 1966, 113, 1151–1158. [Google Scholar] [CrossRef] [Green Version]
- Kapron, F.P.; Keck, D.B.; Maurer, R.D. Radiation Losses in Glass Optical Waveguides. Appl. Phys. Lett. 1970, 17, 423–425. [Google Scholar] [CrossRef]
- Menadier, C.; Kissinger, C.; Adkins, H. The Fotonic Sensor. Instrum. Control. Syst. 1967, 40, 114. [Google Scholar]
- Culshaw, B.; Davies, D.E.N.; Kingsley, S.A. Acoustic Sensitivity of Optical Fiber Waveguides. Electron. Lett. 1977, 13, 760–761. [Google Scholar] [CrossRef]
- Bucaro, J.A.; Dardy, H.D.; Carome, E.F. Fiber-optic Hydrophone. J. Acoust. Soc. Am. 1977, 52, 1302–1304. [Google Scholar] [CrossRef]
- Butter, C.D.; Hocker, G.B. Fiber Optics Strain Gauge. Appl. Opt. 1978, 17, 2867–2869. [Google Scholar] [CrossRef]
- Krohn, D.A.; MacDougall, T.W.; Mendez, A. Fiber Optic Sensors: Fundamentals and Applications, 4th ed.; Society of Photo-Optical Instrumentation Engineers (SPIE): Bellingham, WA, USA, 2015. [Google Scholar]
- Hartog, A.H. Raman sensors and their applications. In Proceedings of the 22nd International Conference on Optical Fiber Sensors (OFS2012), Beijing, China, 14 October 2012. [Google Scholar] [CrossRef]
- Hartog, A.H. An Introduction to Distributed Optical Fibre Sensors; CRC Press Taylor & Francis Group: Abingdon, UK, 2017. [Google Scholar]
- Hill, K.O.; Fujii, Y.; Johnson, D.C.; Kawasaki, B.S. Photosensitivity in Optical Fiber Waveguides: Application to Reflection Filter Fabrication. Appl. Phys. Lett. 1978, 32, 647–649. [Google Scholar] [CrossRef]
- Hill, K.; Meltz, G. Fiber Bragg Grating Technology Fundamentals and Overview. J. Light. Technol. 1997, 15, 1263–1276. [Google Scholar] [CrossRef] [Green Version]
- Barnoski, M.K.; Jensen, S.M. Fiber Waveguides: A Novel Technique for Investigating Attenuation Characteristics. Appl. Opt. 1976, 15, 2112–2115. [Google Scholar] [CrossRef]
- Masoudi, A.; Newson, T.P. Contributed Review: Distributed Optical Fibre Dynamic Strain Sensing. Rev. Sci. Instrum. 2016, 87, 011501. [Google Scholar] [CrossRef] [Green Version]
- Eickhoff, W.; Ulrich, R. Optical Frequency Domain Reflectometry in Single-mode Fiber. Appl. Phys. Lett. 1981, 39, 693–695. [Google Scholar] [CrossRef]
- Maughan, S.M.; Kee, H.H.; Newson, T.P. Simultaneous Distributed Fibre Temperature and Strain Sensor Using Microwave Coherent Detection of Spontaneous Brillouin Backscatter. Meas. Sci. Technol. 2001, 12, 834–842. [Google Scholar] [CrossRef]
- Chaube, P.; Colpitts, B.G.; Jagannathan, D.; Brown, A.W. Distributed Fiber-Optic Sensor for Dynamic Strain Measurement. IEEE Sens. J. 2008, 8, 1067–1072. [Google Scholar] [CrossRef]
- Hotate, K.; Tanaka, M. Distributed Fiber Brillouin Strain Sensing with 1-cm Spatial Resolution by Correlation-Based Continuous-Wave Technique. IEEE Photonics Technol. Lett. 2002, 14, 179–181. [Google Scholar] [CrossRef]
- Dakin, J.P.; Pratt, D.J.; Bibby, G.W.; Ross, J.N. Distributed Optical Fibre Raman Temperature Sensor Using a Semiconductor Light Source and Detector. Electron. Lett. 1985, 21, 569–570. [Google Scholar] [CrossRef]
- Day, G.W.; Rose, A.H. Faraday effect sensors: The state of the art. In Fiber Optic and Laser Sensors VI; International Society for Optics and Photonics: Bellingham, WA, USA, 1989; Volume 985, pp. 138–150. [Google Scholar]
- Bao, X.; Chen, L. Recent Progress in Distributed Fiber Optic Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hartog, A.H.; Leach, A.P.; Gold, M.P. Distributed Temperature Sensing in Solid-Core Fiber. Electron. Lett. 1985, 21, 1061–1062. [Google Scholar] [CrossRef] [Green Version]
- Dean, T.; Cuny, T.; Hartog, A. Determination of the Optimum Gauge Length for Borehole Seismic Surveys Acquired Using Distributed Vibration Sensing. In Proceedings of the 77th EAGE Conference and Exhibition 2015, Madrid, Spain, 1–4 June 2015. [Google Scholar] [CrossRef]
- Dean, T.; Cuny, T.; Hartog, A.H. The Effect of Gauge Length on Axially Incident P-Waves Measured Using Fibre Optic Distributed Vibration Sensing. Geophys. Prospect. 2017, 65, 184–193. [Google Scholar] [CrossRef]
- Yasue, N.; Naruse, H.; Masuda, J.I.; Kino, H.; Nakamura, T.; Yamaura, T. Concrete Pipe Strain Measurement Using Optical Fiber Sensor. IEICE Trans. Electron. 2000, 8, 468–474. [Google Scholar]
- Sasaki, T.; Park, J.; Soga, K.; Momoki, T.; Kawaguchi, K.; Muramatsu, H.; Imasato, Y.; Balagopal, A.; Fontenot, J.; Hall, T. Distributed fibre optic strain sensing of an axially deformed well model in the laboratory. J. Nat. Gas Sci. Eng. 2019, 72, 103028. [Google Scholar] [CrossRef] [Green Version]
- Pearce, J.; Legrand, P.; Dominique, T.; Childers, B.; Rambow, F.D.; Dennis, D. Real-Time Compaction Monitoring with Fiber-Optic Distributed Strain Sensing (DSS). In Proceedings of the SPWLA 50th Annual Logging Symposium, The Woodlands, TX, USA, 21–24 June 2009. [Google Scholar]
- Earles, D.M.; Stoesz, C.W.; Amaral, A.S.; Pearce, J.G.; DeJongh, H.A.; Rambow, F.H.K. Real-Time Monitoring of Sand Control Completions. In Proceedings of the SPE Annual Technical Conference and Exhibition, Florence, Italy, 20–22 September 2010. [Google Scholar]
- Sasaki, T.; Zhang, S.; Soga, K.; Luo, L.; Freifeld, B.; Kitayama, Y.; Kawaguchi, K.; Sugiyama, H. Distributed fiber optic strain sensing of bending deformation of a well mockup in the laboratory. J. Nat. Gas Sci. Eng. 2021, 96, 104309. [Google Scholar] [CrossRef]
- Ravet, F.; Briffod, F.; Nikles, M. Extended Distance Fiber Optic Monitoring for Pipeline Leak and Ground Movement Detection. In Proceedings of the IPC2008, 7th International Pipeline Conference, Calgary, AB, Canada, 29 September–3 October 2008; p. 64521. [Google Scholar]
- Thévenaz, L.; Niklès, M.; Fellay, A.; Facchini, M.; Robert, P.A. Truly Distributed Strain and Temperature Sensing Using Embedded Optical Fibers. In Proceedings of the 5th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 1–5 March 1998; pp. 301–314. [Google Scholar] [CrossRef] [Green Version]
- Ravet, F.; Briffod, F.; Glisic, B.; Nikles, M.; Inaudi, D. Submillimeter Crack Detection with Brillouin-Based Fiber-Optic Sensors. IEEE Sens. J. 2009, 9, 1391–1396. [Google Scholar] [CrossRef]
- Inaudi, D.; Glisic, B. Development of Distributed Strain and Temperature Sensing Cables. In Proceedings of the 17th International Conference on Optical Fibre Sensors, Bruges, Belgium, 23–27 May 2005; Volume 5855. [Google Scholar] [CrossRef]
- Inaudi, D.; Glisic, B. Long-Range Pipeline Monitoring by Distributed Fiber Optic Sensing. J. Press. Vessel. Technol. 2010, 132, 011701. [Google Scholar] [CrossRef] [Green Version]
- Glisic, B.; Yao, Y. Fiber Optic Method for Health Assessment of Pipelines Subjected to Earthquake-Induced Ground Movement. Struct. Health Monit. Int. J. 2012, 11, 696–711. [Google Scholar] [CrossRef]
- Zhang, C.; Bao, X.; Ozkan, I.F.; Mohareb, M.; Ravet, F.; Du, M.; DiGiovanni, D. Prediction of the Pipe Buckling by Using Broadening Factor with Distributed Brillouin Fiber Sensors. Opt. Fiber Technol. 2008, 14, 109–113. [Google Scholar] [CrossRef]
- Lim, K.; Wong, L.; Chiu, W.K.; Kodikara, J. Distributed Fiber Optic Sensors for Monitoring Pressure and Stiffness Changes in Out-of-Round Pipes: Distributed Fiber Optic Sensors for Out-of-Round Pipes. Struct. Control. Health Monit. 2016, 23, 303–314. [Google Scholar] [CrossRef]
- Simpson, B.; Hoult, N.A.; Moore, I.D. Distributed Sensing of Circumferential Strain Using Fiber Optics during Full-Scale Buried Pipe Experiments. J. Pipeline Syst. Eng. Pract. 2015, 6, 04015002. [Google Scholar] [CrossRef]
- Jiang, T.; Ren, L.; Jia, Z.G.; Li, D.S.; Li, H.N. Pipeline Internal Corrosion Monitoring Based on Distributed Strain Measurement Technique. Struct. Control. Health Monit. 2017, 24, e2016. [Google Scholar] [CrossRef]
- Wong, L.; Rathnayaka, S.; Chiu, W.; Kodikara, J. Fatigue Damage Monitoring of a Cast Iron Pipeline Using Distributed Optical Fibre Sensors. Procedia Eng. 2017, 188, 293–300. [Google Scholar] [CrossRef]
- Roberts, D. Subsea Pipeline Monitoring Using Fibre Optic Strain Sensors. In Volume 4: Materials Technology; Ocean Engineering; ASMEDC: San Diego, CA, USA, 2007; pp. 133–140. [Google Scholar] [CrossRef]
- Razali, N.; Abu Bakar, M.; Tamchek, N.; Yaacob, M.; Latif, A.; Zakaria, K.; Mahdi, M. Fiber Bragg Grating for Pressure Monitoring of Full Composite Lightweight Epoxy Sleeve Strengthening System for Submarine Pipeline. J. Nat. Gas Sci. Eng. 2015, 26, 135–141. [Google Scholar] [CrossRef]
- Ren, L.; Jia, Z.G.; Li, H.N.; Song, G. Design and Experimental Study on FBG Hoop-Strain Sensor in Pipeline Monitoring. Opt. Fiber Technol. 2014, 20, 15–23. [Google Scholar] [CrossRef]
- Shi, H.; Gong, J.; Cook, P.R.; Arkwright, J.W.; Png, G.M.; Lambert, M.F.; Zecchin, A.C.; Simpson, A.R. Wave Separation and Pipeline Condition Assessment Using In-Pipe Fibre Optic Pressure Sensors. J. Hydroinform. 2019, 21, 371–379. [Google Scholar] [CrossRef] [Green Version]
- Stajanca, P.; Chruscicki, S.; Homann, T.; Seifert, S.; Schmidt, D.; Habib, A. Detection of Leak-Induced Pipeline Vibrations Using Fiber—Optic Distributed Acoustic Sensing. Sensors 2018, 18, 2841. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wong, L.; Deo, R.; Rathnayaka, S.; Shannon, B.; Zhang, C.; Chiu, W.; Kodikara, J.; Widyastuti, H. Leak Detection in Water Pipes Using Submersible Optical Optic-Based Pressure Sensor. Sensors 2018, 18, 4192. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gong, J.; Png, G.M.; Arkwright, J.W.; Papageorgiou, A.W.; Cook, P.R.; Lambert, M.F.; Simpson, A.R.; Zecchin, A.C. In-Pipe Fibre Optic Pressure Sensor Array for Hydraulic Transient Measurement with Application to Leak Detection. Measurement 2018, 126, 309–317. [Google Scholar] [CrossRef]
- Hou, Q.; Jiao, W.; Ren, L.; Cao, H.; Song, G. Experimental Study of Leakage Detection of Natural Gas Pipeline Using FBG Based Strain Sensor and Least Square Support Vector Machine. J. Loss Prev. Process. Ind. 2014, 32, 144–151. [Google Scholar] [CrossRef]
- Jia, Z.; Ren, L.; Li, H.; Sun, W. Pipeline Leak Localization Based on FBG Hoop Strain Sensors Combined with BP Neural Network. Appl. Sci. 2018, 8, 146. [Google Scholar] [CrossRef] [Green Version]
- Ong, K.S.; Png, W.H.; Lin, H.S.; Pua, C.H.; Rahman, F.A. Acoustic Vibration Sensor Based on Macro-Bend Coated Fiber for Pipeline Leakage Detection. In Proceedings of the 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 167–171. [Google Scholar] [CrossRef]
- Png, W.H.; Lin, H.S.; Pua, C.H.; Rahman, F.A. Pipeline Monitoring and Leak Detection Using Loop Integrated Mach Zehnder Interferometer Optical Fiber Sensor. Opt. Fiber Technol. 2018, 46, 221–225. [Google Scholar] [CrossRef]
- Takashima, S.; Asanuma, H.; Niitsuma, H. A Water Flowmeter Using Dual Fiber Bragg Grating Sensors and Cross-Correlation Technique. Sens. Actuators A Phys. 2004, 116, 66–74. [Google Scholar] [CrossRef]
- Ünalmis, Ö.H. Sound Speed in Downhole Flow Measurement. J. Acoust. Soc. Am. 2016, 140, 430–441. [Google Scholar] [CrossRef]
- Arkwright, J.W.; Underhill, I.D.; Maunder, S.A.; Jafari, A.; Cartwright, N.; Lemckert, C. Fiber Optic Pressure Sensing Arrays for Monitoring Horizontal and Vertical Pressures Generated by Traveling Water Waves. IEEE Sens. J. 2014, 14, 2739–2742. [Google Scholar] [CrossRef]
- Zhao, Q.; Zheng, H.K.; Lv, R.Q.; Gu, Y.F.; Zhao, Y.; Yang, Y. Novel Integrated Optical Fiber Sensor for Temperature, Pressure and Flow Measurement. Sens. Actuators A Phys. 2018, 280, 68–75. [Google Scholar] [CrossRef]
- Huang, J.; Pham, D.T.; Ji, C.; Wang, Z.; Zhou, Z. Multi-Parameter Dynamical Measuring System Using Fibre Bragg Grating Sensors for Industrial Hydraulic Piping. Measurement 2019, 134, 226–235. [Google Scholar] [CrossRef]
- Rosolem, J.B.; Dini, D.C.; Penze, R.S.; Floridia, C.; Leonardi, A.A.; Loichate, M.D.; Durelli, A.S. Fiber Optic Bending Sensor for Water Level Monitoring: Development and Field Test: A Review. IEEE Sens. J. 2013, 13, 4113–4120. [Google Scholar] [CrossRef]
- Schenato, L.; Aneesh, R.; Palmieri, L.; Galtarossa, A.; Pasuto, A. Fiber Optic Sensor for Hydrostatic Pressure and Temperature Measurement in Riverbanks Monitoring. Opt. Laser Technol. 2016, 82, 57–62. [Google Scholar] [CrossRef]
- Schenato, L.; Pasuto, A.; Galtarossa, A.; Palmieri, L. An Optical Fiber Distributed Pressure Sensing Cable With Pa-Sensitivity and Enhanced Spatial Resolution. IEEE Sens. J. 2020, 20, 5900–5908. [Google Scholar] [CrossRef]
- Schenato, L.; Rong, Q.; Shao, Z.; Quiao, X.; Pasuto, A.; Galtarossa, A.; Palmieri, L. Highly Sensitive FBG Pressure Sensor Based on a 3D-Printed Transducer. J. Light. Technol. 2019, 37, 4784–4790. [Google Scholar] [CrossRef]
- Vahabi, N.; Willman, E.; Baghsiahi, H.; Selviah, D.R. Fluid Flow Velocity Measurement in Active Wells Using Fiber Optic Distributed Acoustic Sensors. IEEE Sens. J. 2020, 20, 11499–11507. [Google Scholar] [CrossRef]
- Peng, W.; Pickrell, G.R.; Huang, Z.; Xu, J.; Kim, D.W.; Qi, B.; Wang, A. Self-Compensating Fiber Optic Flow Sensor System and Its Field Applications. Appl. Opt. 2004, 43, 1752–1760. [Google Scholar] [CrossRef] [Green Version]
- Hu, R.P.; Huang, X.G. A Simple Fiber-Optic Flowmeter Based on Bending Loss. IEEE Sens. J. 2009, 9, 1952–1955. [Google Scholar] [CrossRef]
- Barrias, A.; Casas, J.; Villalba, S. A Review of Distributed Optical Fiber Sensors for Civil Engineering Applications. Sensors 2016, 16, 748. [Google Scholar] [CrossRef] [Green Version]
- Majumder, M.; Gangopadhyay, T.K.; Chakraborty, A.K.; Dasgupta, K.; Bhattacharya, D. Fibre Bragg Gratings in Structural Health Monitoring—Present Status and Applications. Sens. Actuators A Phys. 2008, 147, 150–164. [Google Scholar] [CrossRef]
- Morey, W.W.; Dunphy, J.R.; Meltz, G. Multiplexing fiber Bragg grating sensors. In Proceedings of the SPIE, Distributed and Multiplexed Fiber Optic Sensors, Boston, MA, USA, 8 September 1992. [Google Scholar] [CrossRef]
- Kreuzer, M. Strain Measurement with Fibre Bragg Grating Sensors; Technical Report; HBM: Waalwijk, The Netherlands, 2006. [Google Scholar]
- Margulis, W.; Lindberg, R.; Laurell, F.; Hedin, G. Intracavity interrogation of an array of fiber Bragg gratings. Opt. Express 2021, 29, 111–118. [Google Scholar] [CrossRef] [PubMed]
- Kersey, A.D.; Davis, M.A.; Patrick, H.J.; LeBlanc, M.; Koo, K.P.; Askins, C.G.; Putnam, M.A.; Friebele, E.J. Fiber Grating Sensors. J. Light. Technol. 1997, 15, 1442–1463. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | Method | Geometry | Retrofitting | Type of Environment | Validation |
|---|---|---|---|---|---|
| Condition monitoring (16) | Rayleigh OFDR (3) | Axial (9) | Easy (1) | Pressurised (10) | Lab (13) |
| BOTDR (3) | Hoop (4) | Moderate (1) | Non-pressurised (6) | Field (3) | |
| BOTDA (6) | Helical (2) | Difficult (14) | |||
| FBG (4) | Other (1) | ||||
| Leak detection (7) | Rayleigh OTDR (1) | Axial (1) | Easy (2) | Pressurised (7) | Lab (6) |
| Rayleigh OFDR (1) | Hoop (4) | Moderate (0) | Non-pressurised (0) | Field (1) | |
| FBG (3) | Helical (1) | Difficult (5) | |||
| Bend loss (1) | Other (1) | ||||
| Interferometry (1) | |||||
| Measurement of flow | Rayleigh OTDR (2) | Axial (3) | Easy (3) | Pressurised (7) | Lab (11) |
| parameters (12) | Rayleigh OFDR (2) | Helical (1) | Moderate (1) | Non-pressurised (5) | Field (2) |
| FBG (6) | Other (8) | Difficult (7) | Simulation (1) | ||
| Bend loss (1) | N/A (1) | ||||
| Interferometry (1) | |||||
| Total (35) | Rayleigh OTDR (3) | Axial (13) | Easy (6) | Pressurised (24) | Lab (30) |
| Rayleigh OFDR (6) | Hoop (8) | Moderate (2) | Non-pressurised (11) | Field (5) | |
| BOTDR (3) | Helical (4) | Difficult (26) | Simulation (2) | ||
| BOTDA (6) | Other (10) | N/A (1) | |||
| FBG (13) | |||||
| Bend loss (2) | |||||
| Interferometry (2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prisutova, J.; Krynkin, A.; Tait, S.; Horoshenkov, K. Use of Fibre-Optic Sensors for Pipe Condition and Hydraulics Measurements: A Review. CivilEng 2022, 3, 85-113. https://doi.org/10.3390/civileng3010006
Prisutova J, Krynkin A, Tait S, Horoshenkov K. Use of Fibre-Optic Sensors for Pipe Condition and Hydraulics Measurements: A Review. CivilEng. 2022; 3(1):85-113. https://doi.org/10.3390/civileng3010006
Chicago/Turabian StylePrisutova, Jevgenija, Anton Krynkin, Simon Tait, and Kirill Horoshenkov. 2022. "Use of Fibre-Optic Sensors for Pipe Condition and Hydraulics Measurements: A Review" CivilEng 3, no. 1: 85-113. https://doi.org/10.3390/civileng3010006
APA StylePrisutova, J., Krynkin, A., Tait, S., & Horoshenkov, K. (2022). Use of Fibre-Optic Sensors for Pipe Condition and Hydraulics Measurements: A Review. CivilEng, 3(1), 85-113. https://doi.org/10.3390/civileng3010006