




Solving a Stochastic Multi-Objective Sequence Dependence Disassembly Sequence Planning Problem with an Innovative Bees Algorithm

Abstract
1. Introduction
2. Proposed Problem
2.1. Sequence-Dependent DSP Problem
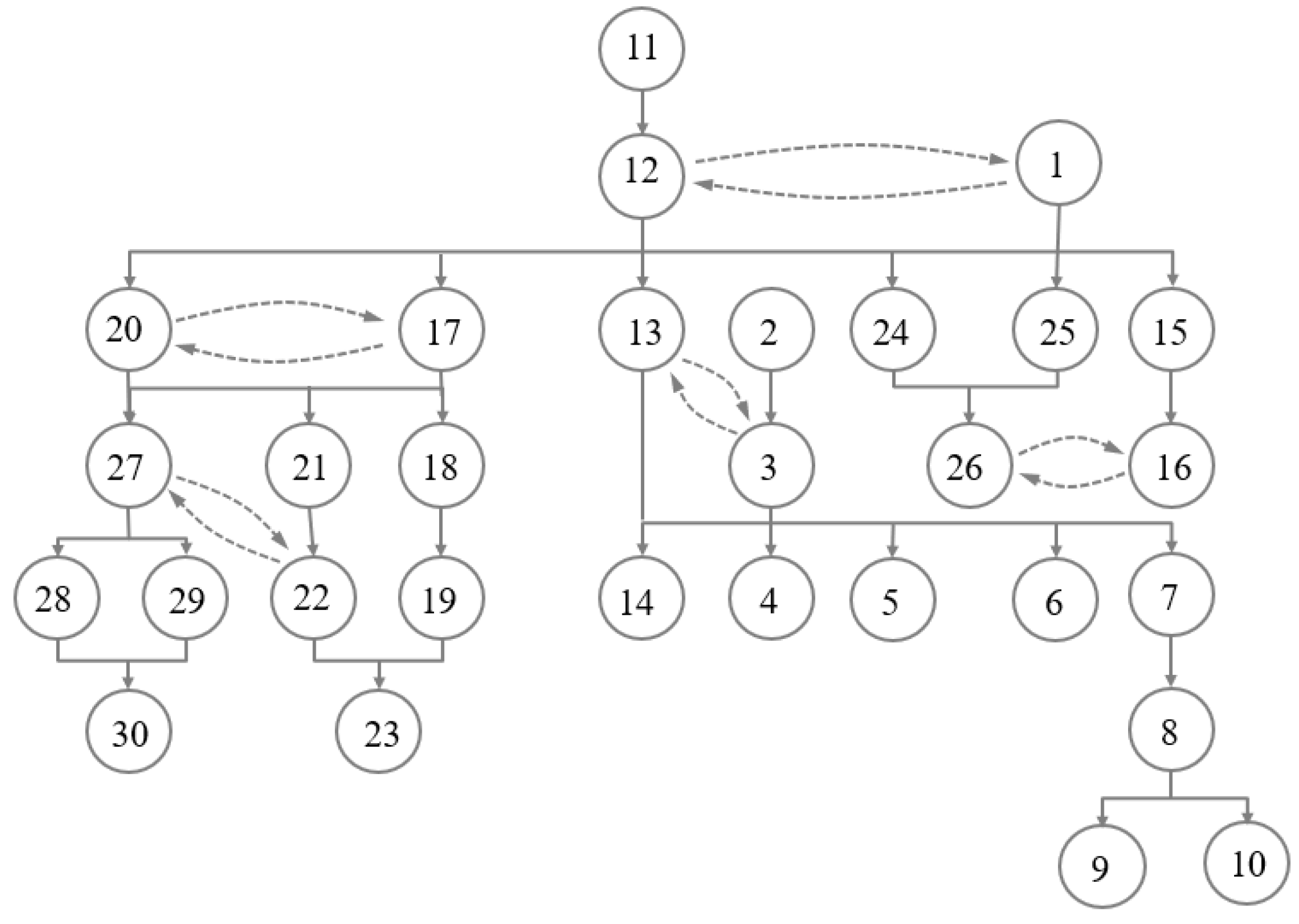
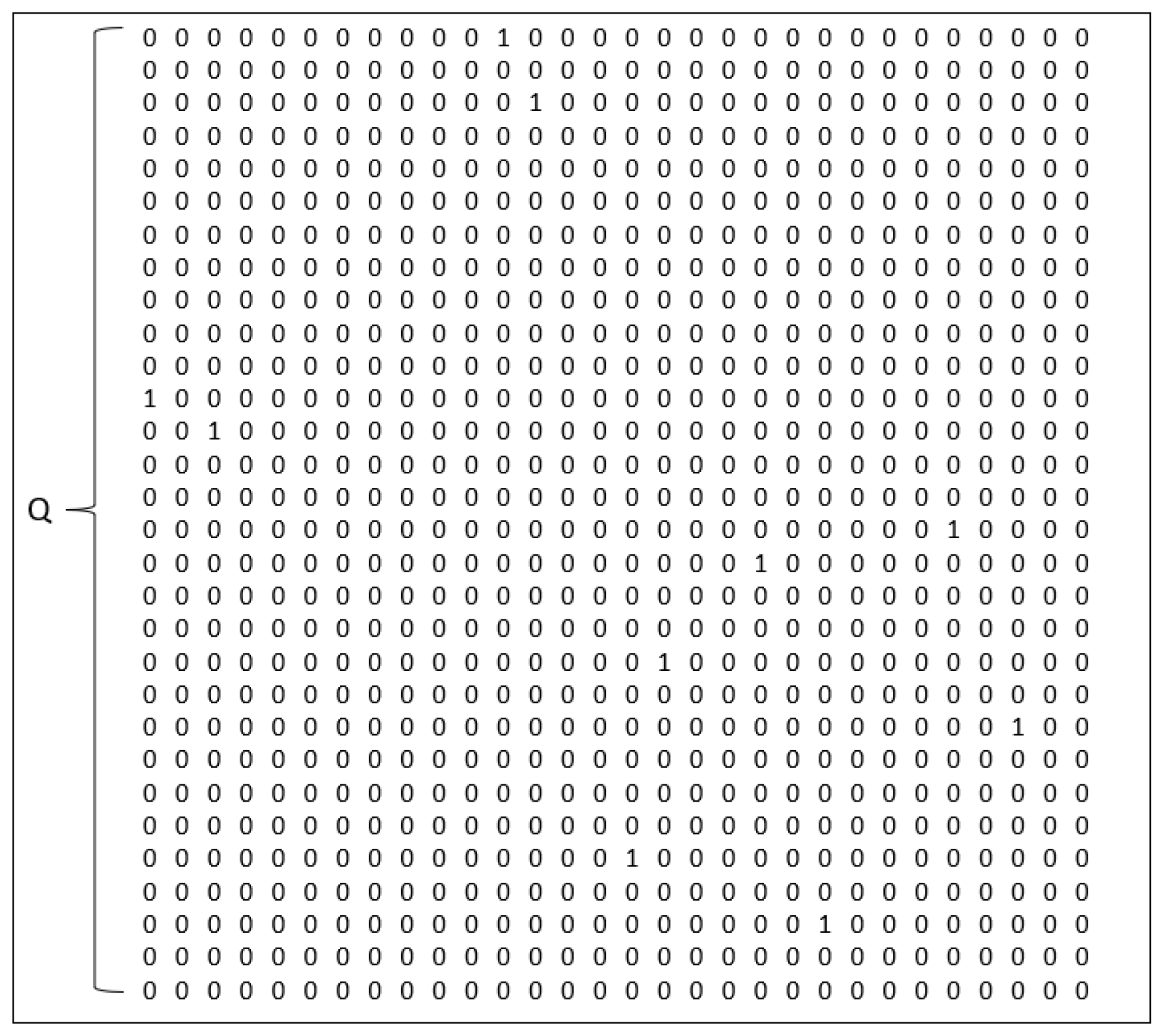
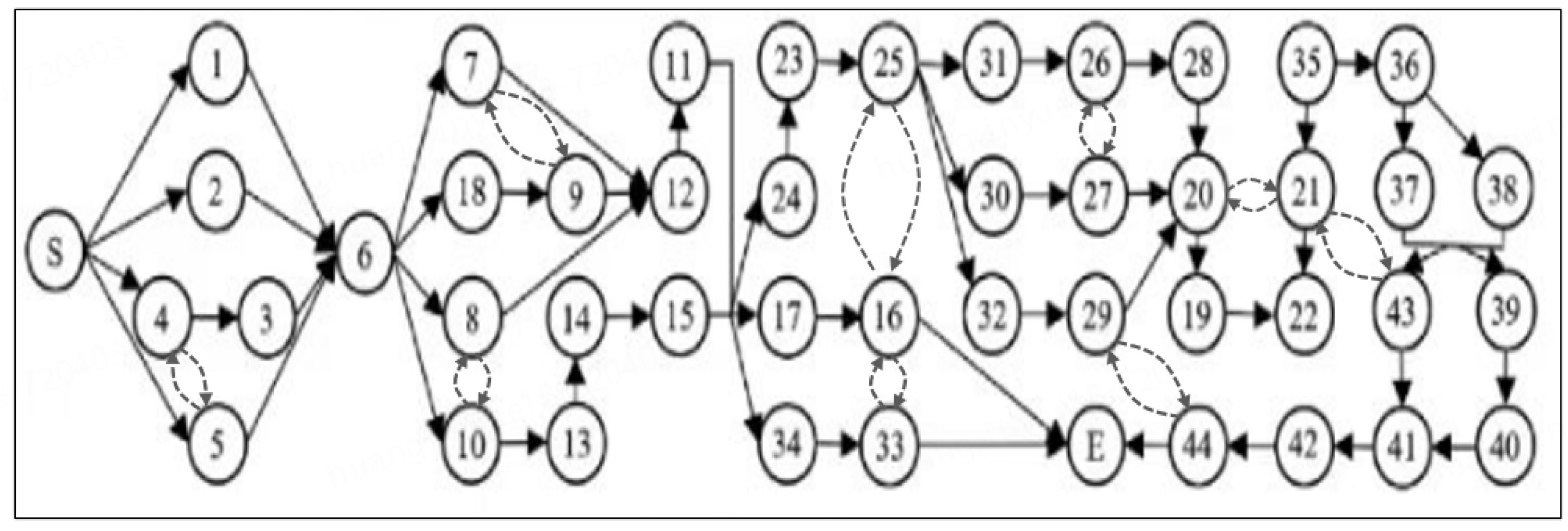
2.2. Disassembly Hybrid Graph
2.3. Proposed Model
- Disassembly time: The swift disassembly of products helps to lessen the adverse environmental effects of waste, reducing the risks of hazardous substance spills and disruptions to ecosystems. It also enables the quicker recycling of valuable materials and components.
- Disassembly energy consumption: Minimizing energy use is a vital step towards a circular economy. This strategy not only reduces environmental harm but also allows businesses to cut operational costs, thus enhancing economic efficiency.
| Indices: | |
| Index of disassembly tasks, | |
| Parameters: | |
| Total number of tasks in the EOL product | |
| Stochastic disassembly time for task | |
| Stochastic time to change the tool of disassembly | |
| Stochastic time to change the direction of disassembly | |
| Unit time of energy consumption of task | |
| Stochastic time to change the tool of disassembly | |
| Stochastic time to change the direction of disassembly | |
| Difficulty of disassembly task | |
| Stochastic increase in time when task is interfered with by task | |
| 1, if task must be executed before task, otherwise 0 | |
| Decision variables: | |
| 1, if task is executed before task , otherwise 0 | |
| 1, if task is interfered with by task , otherwise 0 | |
| 1, if the task requires a different tool to the previous task in the sequence, otherwise 0 | |
| 1, if the task m is in a different direction to the previous task in the sequence, otherwise 0 |
3. Proposed Solution Method
3.1. Population Initialisation
3.2. Classification of Scout Bees’ Role
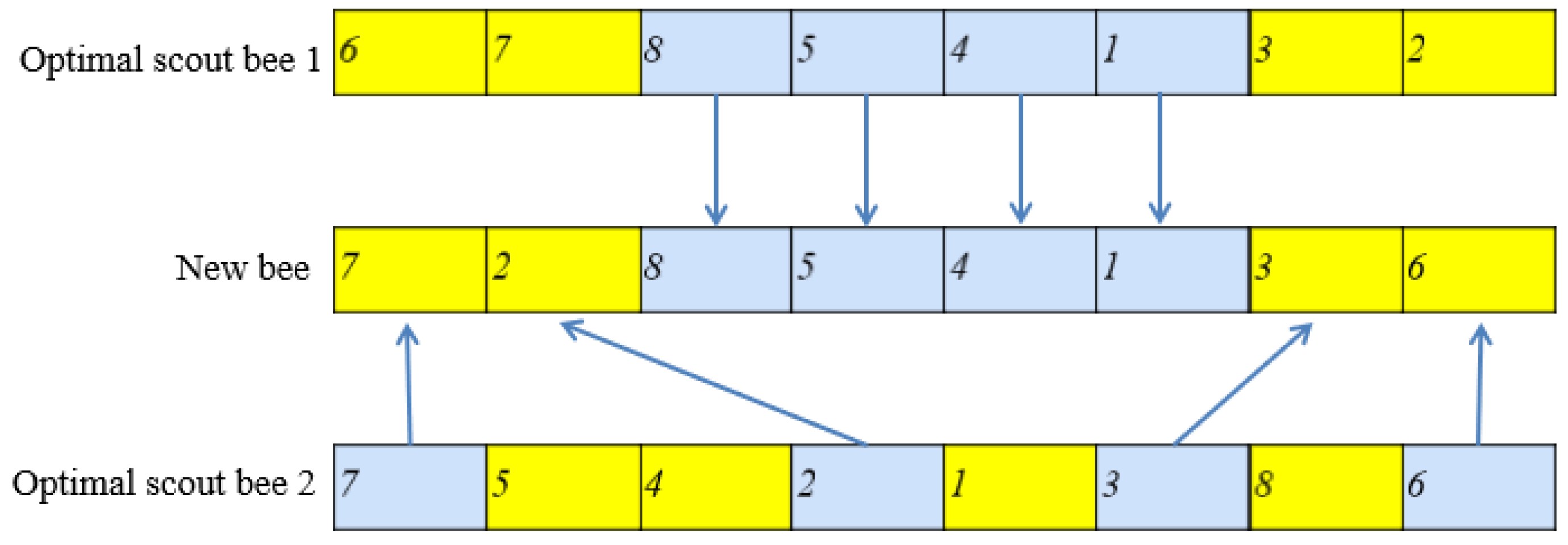
3.3. Search Phase of the Optimal Scout Bees
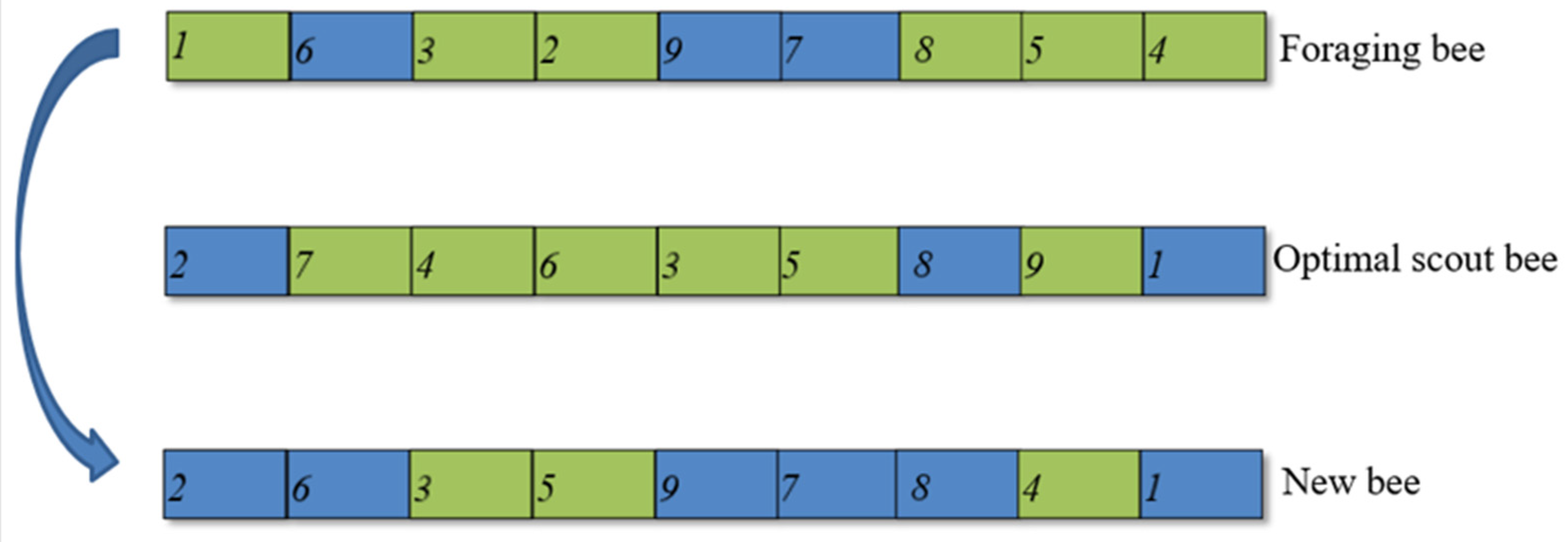
3.4. Search Phase of the Better Scout Bees
3.5. Constraint Correction Methods
3.6. Termination of the Algorithm
3.7. Algorithmic Framework
| Algorithm 1: IBA Main Loop |
| Input: Algorithm parameters, problem parameters Output: Pareto non-dominated solution set For i = 1: Produce scout bee individuals, as shown in Section 3.1 End For Form optimal scout bees, better scout bees, and random scout bees, as shown in Section 3.2 it = 0 While it < For i = 1: #Search phase of optimal scout bees # For j = 1: Select operator, as shown in Section 3.3 Search for nectar near present scout bee, as shown in Section 3.3 Update operator weights End For Save non-dominated nectar Reset operator weights End For For i = 1: # Search phase of better scout bees # For j = 1: Select operator, as shown in Section 3.3 Search for nectar near present scout bee, as shown in Section 3.4 Update operator weights End For Save non-dominated nectar Reset operator weights End For For i = 1: # Search phase of random scout bees # Randomly generate new scout bees, as shown in Section 3.1 End For Update scout bees population Save non-dominated solutions to an external archive it = it + 1 End While Obtain the non-dominated solution set of all solutions saved in the external archive Output the final non-dominated solution set |
4. Case Study
5. Comparison with Other Algorithms
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Zhou, H.; Fu, C.; Mi, M.; Zhan, C.; Pham, D.T.; Fathollahi-Fard, A.M. Application and planning of an energy-oriented stochastic disassembly line balancing problem. Environ. Sci. Pollut. Res. 2023, 1–15. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, M.; Zussman, E.; Caudill, R. Disassembly modeling, planning and application: A review. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; IEEE: Piscataway, NJ, USA, 2002; Volume 3, pp. 2197–2202. [Google Scholar]
- Ren, Y.; Meng, L.; Zhang, C.; Zhao, F.; Saif, U.; Huang, A.; Mendis, G.P.; Sutherland, J.W. An efficient metaheuristic for sequence-dependent disassembly planning. J. Clean. Prod. 2020, 245, 118644. [Google Scholar] [CrossRef]
- Li, J.R.; Khoo, L.P.; Tor, S.B. A novel representation scheme for disassembly sequence planning. Int. J. Adv. Manuf. Technol. 2002, 20, 621–630. [Google Scholar] [CrossRef]
- Wang, H.; Xiang, D.; Duan, G. A genetic algorithm for product disassembly sequence planning. Neurocomputing 2008, 71, 2720–2726. [Google Scholar]
- Yin, F.; Wang, K.; Wang, X.; Li, L.; Liu, G.; Maani, T.; Sutherland, J.W. An improved disassembly hybrid graph model for selective disassembly sequence planning. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2024, 238, 1519–1530. [Google Scholar] [CrossRef]
- Wu, P.; Wang, H.; Li, B.; Fu, W.; Ren, J.; He, Q. Disassembly sequence planning and application using simplified discrete gravitational search algorithm for equipment maintenance in hydropower station. Expert Syst. Appl. 2022, 208, 118046. [Google Scholar] [CrossRef]
- Zhang, C.; Fathollahi-Fard, A.M.; Li, J.; Tian, G.; Zhang, T. Disassembly sequence planning for intelligent manufacturing using social engineering optimizer. Symmetry 2021, 13, 663. [Google Scholar] [CrossRef]
- Xing, Y.; Wu, D.; Qu, L. Parallel disassembly sequence planning using improved ant colony algorithm. Int. J. Adv. Manuf. Technol. 2021, 113, 2327–2342. [Google Scholar] [CrossRef]
- Xie, J.; Li, X.; Gao, L. Disassembly sequence planning based on a modified grey wolf optimizer. Int. J. Adv. Manuf. Technol. 2021, 116, 3731–3750. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, L. Optimizing a disassembly sequence planning with success rates of disassembly operations via a variable neighborhood search algorithm. IEEE Access 2021, 9, 157540–157549. [Google Scholar] [CrossRef]
- Yu, D.; Zhang, X.; Tian, G.; Jiang, Z.; Liu, Z.; Qiang, T.; Zhan, C. Disassembly Sequence Planning for Green Remanufacturing Using an Improved Whale Optimisation Algorithm. Processes 2022, 10, 1998. [Google Scholar] [CrossRef]
- Sun, X.; Guo, S.; Guo, J.; Du, B.; Tang, H. An improved multi-objective evolutionary algorithm for multiple-target asynchronous parallel selective disassembly sequence planning. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2023, 237, 1553–1569. [Google Scholar] [CrossRef]
- Fu, W.; Liu, X.; Chu, F.; Li, B.; Gu, J. A disassembly sequence planning method with improved discrete grey wolf optimizer for equipment maintenance in hydropower station. J. Supercomput. 2023, 79, 4351–4382. [Google Scholar] [CrossRef]
- Kim, H.W.; Lee, D.H. An optimal algorithm for selective disassembly sequencing with sequence-dependent set-ups in parallel disassembly environment. Int. J. Prod. Res. 2017, 55, 7317–7333. [Google Scholar] [CrossRef]
- Ma, Y.S.; Jun, H.B.; Kim, H.W.; Lee, D.H. Disassembly process planning algorithms for end-of-life product recovery and environmentally conscious disposal. Int. J. Prod. Res. 2011, 49, 7007–7027. [Google Scholar] [CrossRef]
- Guo, X.; Zhou, M.; Liu, S.; Qi, L. Lexicographic multiobjective scatter search for the optimization of sequence-dependent selective disassembly subject to multiresource constraints. IEEE Trans. Cybern. 2019, 50, 3307–3317. [Google Scholar] [CrossRef] [PubMed]
- Xia, X.; Liu, W.; Zhang, Z.; Wang, L. Partial disassembly line balancing problem analysis based on sequence-dependent stochastic mixed-flow. J. Comput. Inf. Sci. Eng. 2020, 20, 061005. [Google Scholar] [CrossRef]
- Hartono, N.; Ramírez, F.J.; Pham, D.T. Optimisation of Product Recovery Options in End-of-Life Product Disassembly by Robots. Automation 2023, 4, 359–377. [Google Scholar] [CrossRef]
- Yang, S.; Zhuo, X.; Ning, W.; Xia, X.; Huang, Y. Integrated Risk-Aware Smart Dis-assembly Planning for Scrap Electric Vehicle Batteries. Energies 2024, 17, 2946. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, C.; Zhang, M.; Lu, Y.; Jia, Y.; Xu, Y. An ontology and rule-based method for human–robot collaborative disassembly planning in smart remanufacturing. Robot. Comput.-Integr. Manuf. 2024, 89, 102766. [Google Scholar] [CrossRef]
- Chen, Z.; Cheng, H.; Liu, Y.; Aljuaid, M. An improved artificial bee colony algorithm for the multi-objective cooperative disassembly sequence optimization problem considering carbon emissions and profit. Eng. Optim. 2024, 1–22. [Google Scholar] [CrossRef]
- Liu, J.; Xu, Z.; Xiong, H.; Lin, Q.; Xu, W.; Zhou, Z. Digital twin-driven robotic dis-assembly sequence dynamic planning under uncertain missing condition. IEEE Trans. Ind. Inform. 2023, 19, 11846–11855. [Google Scholar] [CrossRef]
- Zhang, X.; Fu, A.; Zhan, C.; Pham, D.T.; Zhao, Q.; Qiang, T.; Aljuaid, M.; Fu, C. Selective disassembly sequence planning under uncertainty using trapezoidal fuzzy numbers: A novel hybrid metaheuristic algorithm. Eng. Appl. Artif. Intell. 2024, 128, 107459. [Google Scholar] [CrossRef]
- Wang, K.; Guo, J.; Du, B.; Li, Y.; Tang, H.; Li, X.; Gao, L. A novel MILP model and an improved genetic algorithm for disassembly line balancing and sequence planning with partial destructive mode. Comput. Ind. Eng. 2023, 186, 109704. [Google Scholar] [CrossRef]
- Hartono, N.; Ramírez, F.J.; Pham, D.T. A multiobjective decision-making approach for modelling and planning economically and environmentally sustainable robotic disassembly for remanufacturing. Comput. Ind. Eng. 2023, 184, 109535. [Google Scholar] [CrossRef]
- Liu, J.; Zhan, C.; Liu, Z.; Zheng, S.; Wang, H.; Meng, Z.; Xu, R. Equipment disassembly and maintenance in an uncertain environment based on a peafowl optimization algorithm. Processes 2023, 11, 2462. [Google Scholar] [CrossRef]
- Gulivindala, A.K.; Bahubalendruni, M.R.; P, M.B.; Eswaran, M. Mechanical dis-assembly sequence planning for end-of-life products to maximize recyclability. Sādhanā 2023, 48, 109. [Google Scholar] [CrossRef]
- Zhan, C.; Zhang, X.; Tian, G.; Pham, D.T.; Ivanov, M.; Aleksandrov, A.; Fu, C.; Zhang, J.; Wu, Z. Environment-oriented disassembly planning for end-of-life vehicle batteries based on an improved northern goshawk optimisation algorithm. Environ. Sci. Pollut. Res. 2023, 30, 47956–47971. [Google Scholar] [CrossRef] [PubMed]
- Liao, H.Y.; Chen, Y.; Hu, B.; Behdad, S. Optimization-based disassembly sequence planning under uncertainty for human–robot collaboration. J. Mech. Des. 2023, 145, 022001. [Google Scholar] [CrossRef]
- Qiu, L.; Dong, L.; Wang, Z.; Zhang, S.; Xu, P. Asynchronous parallel disassembly sequence planning method of complex products using discrete multi-objective optimization. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2022, 236, 1466–1482. [Google Scholar] [CrossRef]
- Liu, J. Research on the Equilibrium Problem of Sequentially Dependent Disassembly Line; University of Electronic Science and Technology: Chengdu, China, 2018. [Google Scholar]
- Yin, T.; Zhang, Z.; Jiang, J. A Pareto-discrete hummingbird algorithm for partial sequence-dependent disassembly line balancing problem considering tool requirements. J. Manuf. Syst. 2021, 60, 406–428. [Google Scholar] [CrossRef]
- Pham, D.T.; Ghanbarzadeh, A.; Koç, E.; Otri, S.; Rahim, S.; Zaidi, M. The bees algorithm—A novel tool for complex optimisation problems. In Intelligent Production Machines and Systems; Elsevier Science Ltd.: Amsterdam, The Netherlands, 2006; pp. 454–459. [Google Scholar]
- Hartono, N.; Ramírez, F.J.; Pham, D.T. Optimisation of robotic disassembly plans using the Bees Algorithm. Robot. Comput.-Integr. Manuf. 2022, 78, 102411. [Google Scholar] [CrossRef]
- Mojtahedi, M.; Fathollahi-Fard, A.M.; Tavakkoli-Moghaddam, R.; Newton, S. Sustainable vehicle routing problem for coordinated solid waste management. J. Ind. Inf. Integr. 2021, 23, 100220. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Shan, F.; Wu, Z.; Li, J. Research on the balance problem of lithium battery disassembly line based on improved particle swarm algorithm. Intern. Combust. Engines Accessories 2022, 23, 4–6. [Google Scholar]
- Xu, Z.; Han, Y. Two sided disassembly line balancing problem with rest time of works: A constraint programming model and an improved NSGA II algorithm. Expert Syst. Appl. 2024, 239, 122323. [Google Scholar] [CrossRef]
- Ji, J.; Wang, Y. Selective disassembly sequence optimization based on the improved immune algorithm. Robot. Intell. Autom. 2023, 43, 96–108. [Google Scholar] [CrossRef]
- Fan, Y.; Zhan, C.; Aljuaid, M. Multi-Objective Disassembly Sequence Planning in Uncertain Industrial Settings: An Enhanced Water Wave Optimization Algorithm. Processes 2023, 11, 3057. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, H. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L. Multiobjective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef]
- Fu, Y.; Zhang, Z.; Liang, P.; Tian, G.; Zhang, C. Integrated remanufacturing scheduling of disassembly, reprocessing and reassembly considering energy efficiency and stochasticity through group teaching optimization and simulation approaches. Eng. Optim. 2024, 1–22. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Recent Publications | Number of Objectives | Type of Decision Criteria | Consideration of Uncertainty | Consideration of Sequential Dependencies | ||||
|---|---|---|---|---|---|---|---|---|
| Single | Multiple | Economic | Environmental | Yes | No | Yes | No | |
| Yang et al. (2024) [20] | √ | √ | √ | √ | √ | |||
| Hu et al. (2024) [21] | √ | √ | √ | √ | ||||
| Chen et al. (2024) [22] | √ | √ | √ | √ | √ | |||
| Liu et al. (2023) [23] | √ | √ | √ | √ | √ | |||
| Zhang et al. (2024) [24] | √ | √ | √ | √ | √ | |||
| Wang et al. (2023) [25] | √ | √ | √ | √ | √ | |||
| Hartono et al. (2023) [26] | √ | √ | √ | √ | √ | |||
| Liu et al. (2023) [27] | √ | √ | √ | √ | ||||
| Gulivindala et al. (2023) [28] | √ | √ | √ | √ | ||||
| Zhan et al. (2023) [29] | √ | √ | √ | √ | ||||
| Liao et al. (2023) [30] | √ | √ | √ | √ | ||||
| Qiu et al. (2022) [31] | √ | √ | √ | √ | ||||
| This work | √ | √ | √ | √ | √ | |||
| Order | Name | Tool | Direction | Disassembly Time |
|---|---|---|---|---|
| 1 | Fastening screws around the cover | wrench | +Z | U (175, 182) |
| 2 | Fastening screws in the center of the cover | wrench | +Z | U (54, 56) |
| 3 | Repair switch | wrench | +Z | U (43, 44) |
| 4 | Maintenance switch fastening screws | Screwdriver | +Z | U (28, 32) |
| 5 | Connecting plate fastening screws | Screwdriver | +Z | U (42, 47) |
| 6 | Box cover | wrench | +Z | U (20, 25) |
| 7 | Copper Cable Ties | wrench | +Z | U (58, 61) |
| 8 | Pipe Ties | Plier | +Y | U (42, 47) |
| 9 | Wire Harness Tie | Plier | +Y | U (40, 43) |
| 10 | Copper Tape | Plier | +Y | U (16, 19) |
| 11 | Wiring Harness | Plier | +Y | U (8, 10) |
| 12 | Wire Harness Plugs | Plier | +Y | U (32, 35) |
| 13 | Copper Protection Shell | Plier | +Y | U (18, 22) |
| 14 | Copper fastening screws | Plier | +Y | U (21, 25) |
| 15 | Copper busbar | Hand | -Y | U (10, 13) |
| 16 | Battery Management System | Hand | -Y | U (22, 24) |
| 17 | Battery Management System fastening screws | Plier | -Y | U (21, 24) |
| 18 | Charging equipment cover | Plier | -Z | U (14, 16) |
| 19 | Charging equipment bottom | Plier | -Z | U (4, 6) |
| 20 | Screws for the bottom of the charging unit | wrench | +Z | U (16, 50) |
| 21 | Charging equipment base plate | wrench | -Y | U (34, 37) |
| 22 | Charging equipment base plate fastening screws | wrench | -Y | U (23, 25) |
| 23 | Shims | Plier | -Y | U (15, 19) |
| 24 | Gasket fastening screws | Plier | -Y | U (45, 50) |
| 25 | Current Sensing Wire fastening screws | Screwdriver | -X | U (27, 30) |
| 26 | Relay Plugs | Screwdriver | -X | U (15, 20) |
| 27 | Current Sensor | Screwdriver | -X | U (30, 35) |
| 28 | Relay | Screwdriver | +X | U (40, 45) |
| 29 | Fuses | Screwdriver | +X | U (25, 30) |
| 30 | Current Sensor Fastening Screws | Hand | +X | U (8, 12) |
| 31 | Relay Fastening Screws | Hand | +Y | U (17, 20) |
| 32 | Fuse fastening screws | Hand | +Y | U (8, 15) |
| 33 | Adapter plate | Screwdriver | +Z | U (8, 10) |
| 34 | Splice plate fastening screws | wrench | +Z | U (18, 25) |
| 35 | Module fastening screws | Plier | +Z | U (17, 19) |
| 36 | Module Fastener | Plier | +Z | U (3, 7) |
| 37 | Module 1 | Plier | -Z | U (2, 5) |
| 38 | Module 2 | wrench | -Z | U (14, 17) |
| 39 | Coolant Tube Snap | wrench | -Y | U (15, 20) |
| 40 | Coolant Plastic Tube | wrench | -Y | U (4, 6) |
| 41 | Condensate tube fastening screws | wrench | -Y | U (12, 25) |
| 42 | Condensate tube | Screwdriver | -Y | U (14, 17) |
| 43 | Thermal Conductive Silicone | Screwdriver | -Y | U (20, 25) |
| 44 | Bottom | Screwdriver | -Y | U (4, 8) |
| Parameters | Value |
|---|---|
| 200 | |
| 50 | |
| 8 | |
| 5 | |
| 6 | |
| 5 |
| Order | Non-Dominated Solutions | ||
|---|---|---|---|
| 1 | [5,35,36,38,2,37,39,43,1,40,21,41,42,4,3,6,10,44,8,18,9,7,12,13,14,11,15,17,24,23,16,34,33,25,31,32,29,30,26,28,27,20,19,22] | 1575.78 | 1893.11 |
| 2 | [5,35,2,36,38,37,39,43,1,40,21,41,42,4,44,3,6,8,10,18,9,7,12,13,14,11,15,17,24,23,16,34,33,25,31,32,29,30,26,28,27,20,19,22] | 1548.95 | 1934.45 |
| 3 | [5,35,2,36,38,37,21,43,1,4,3,6,18,9,10,8,39,7,12,13,11,14,40,15,34,17,41,16,24,23,25,30,33,32,31,42,29,44,26,28,27,20,19,22] | 1639.06 | 1684.36 |
| 4 | [5,35,2,36,38,37,39,43,1,40,21,41,42,4,3,6,10,44,8,18,9,7,12,13,14,11,15,17,16,24,23,34,33,25,31,32,29,30,26,28,27,20,19,22] | 1530.31 | 1947.11 |
| 5 | [5,35,2,4,3,36,38,1,6,10,21,7,37,43,39,40,13,41,8,18,9,14,12,11,15,34,33,17,24,23,16,42,25,31,44,32,29,30,26,28,27,20,19,22] | 1621.75 | 1778.63 |
| 6 | [5,35,2,36,38,37,39,43,1,40,21,41,42,4,3,6,8,44,10,18,9,7,12,13,14,11,15,17,24,23,16,34,33,25,31,32,29,30,26,28,27,20,19,22] | 1573.78 | 1906.38 |
| 7 | [5,35,2,36,38,37,39,43,1,40,21,41,42,4,3,6,10,44,8,18,9,7,12,13,14,11,15,17,24,23,34,16,33,25,31,32,29,30,26,28,27,20,19,22] | 1548.99 | 1923.55 |
| 8 | [5,35,2,36,38,37,39,1,43,40,21,41,42,4,3,6,10,44,8,18,9,7,12,13,14,11,15,17,24,23,34,16,33,25,31,32,29,30,26,28,27,20,19,22] | 1512.80 | 1991.95 |
| 9 | [5,35,2,36,38,1,37,43,4,21,39,40,3,6,10,18,7,41,8,42,9,12,11,13,14,15,44,17,24,23,16,34,33,25,31,32,29,30,27,26,28,20,19,22] | 1528.48 | 1970.61 |
| 10 | [5,35,2,36,38,4,37,43,1,3,21,6,10,13,18,8,7,14,9,39,40,12,15,41,11,42,24,17,16,23,25,34,33,31,30,32,29,27,26,28,44,20,19,22] | 1720.40 | 1574.99 |
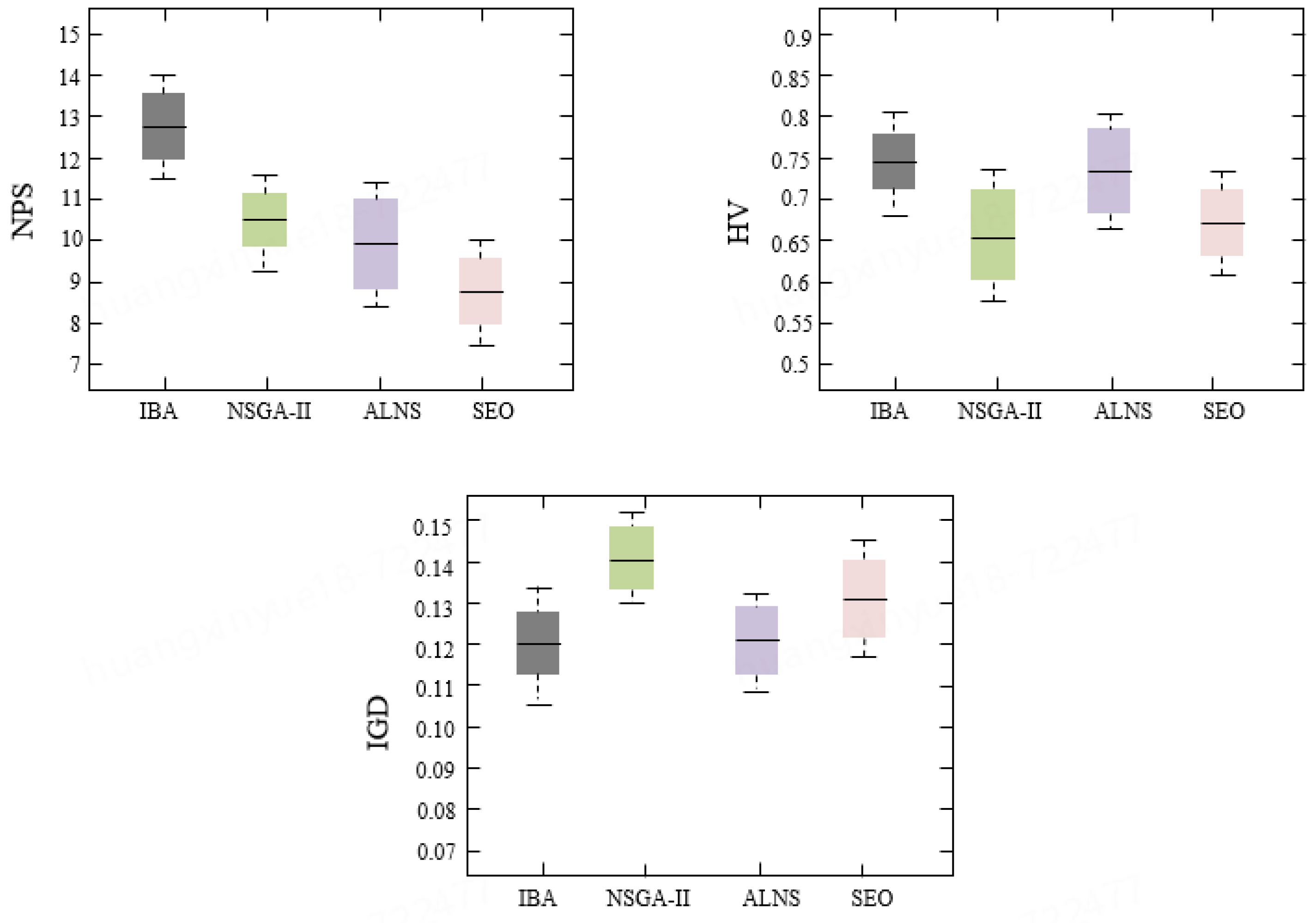
| Algorithm | NPS | HV | IGD |
|---|---|---|---|
| IBA | 12.62 | 0.74 | 0.12 |
| NSGA-II | 10.54 | 0.65 | 0.14 |
| IA | 9.87 | 0.73 | 0.12 |
| EWWO | 8.78 | 0.66 | 0.13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Zhang, X.; Gao, Y.; Zhan, C. Solving a Stochastic Multi-Objective Sequence Dependence Disassembly Sequence Planning Problem with an Innovative Bees Algorithm. Automation 2024, 5, 432-449. https://doi.org/10.3390/automation5030025
Huang X, Zhang X, Gao Y, Zhan C. Solving a Stochastic Multi-Objective Sequence Dependence Disassembly Sequence Planning Problem with an Innovative Bees Algorithm. Automation. 2024; 5(3):432-449. https://doi.org/10.3390/automation5030025
Chicago/Turabian StyleHuang, Xinyue, Xuesong Zhang, Yanlong Gao, and Changshu Zhan. 2024. "Solving a Stochastic Multi-Objective Sequence Dependence Disassembly Sequence Planning Problem with an Innovative Bees Algorithm" Automation 5, no. 3: 432-449. https://doi.org/10.3390/automation5030025
APA StyleHuang, X., Zhang, X., Gao, Y., & Zhan, C. (2024). Solving a Stochastic Multi-Objective Sequence Dependence Disassembly Sequence Planning Problem with an Innovative Bees Algorithm. Automation, 5(3), 432-449. https://doi.org/10.3390/automation5030025