
Predictive Performance of Mobile Vis–NIR Spectroscopy for Mapping Key Fertility Attributes in Tropical Soils through Local Models Using PLS and ANN


 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
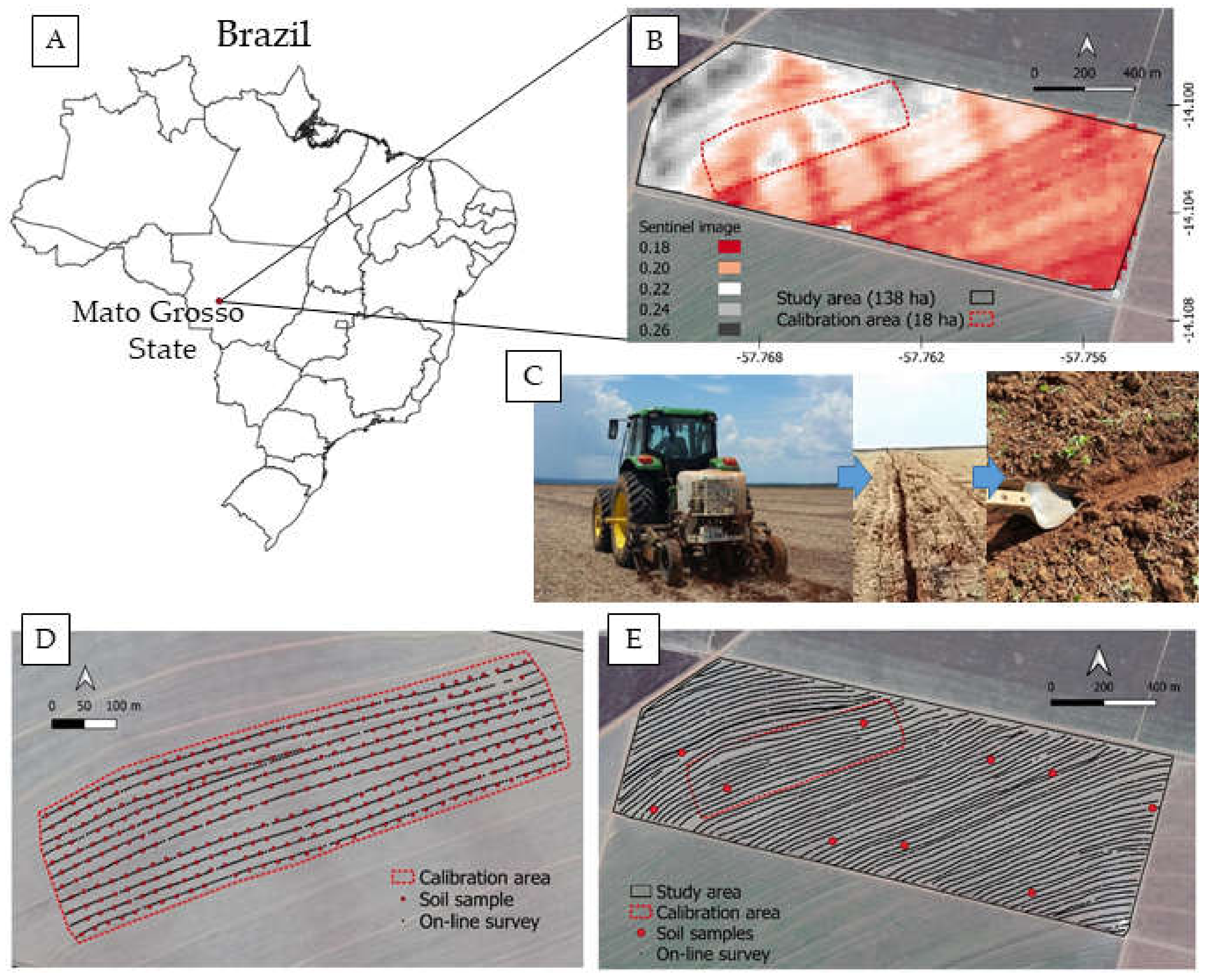
2.1. Study Area and Soil Sampling
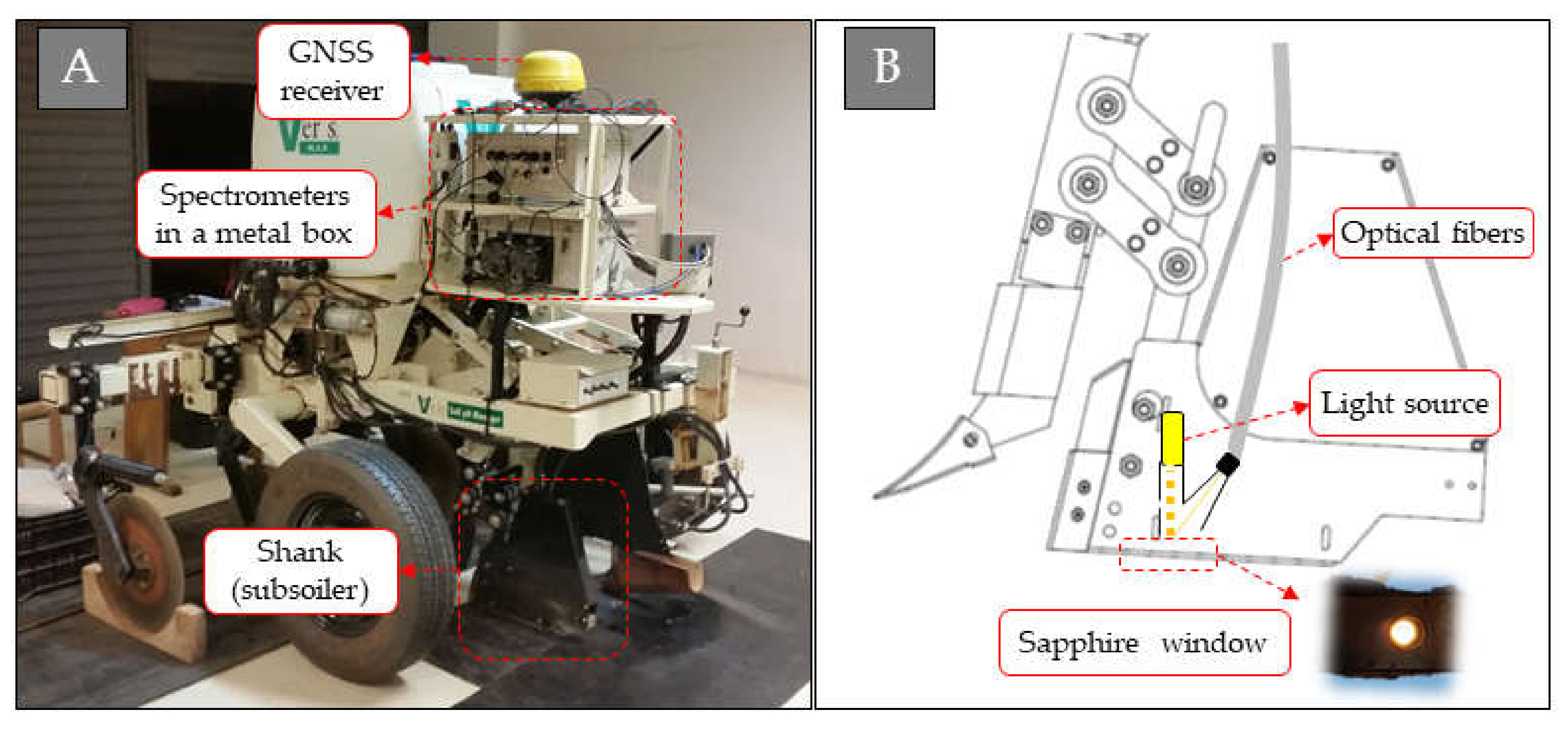
2.2. Mobile Platform and On-Line Vis–NIR Data Acquisition
2.3. Laboratory Reference Analyses
2.4. Predictive Modeling Using Spectral Data Acquisition 1
2.5. Model Test Using the Spectral Data Acquisition 2
3. Results
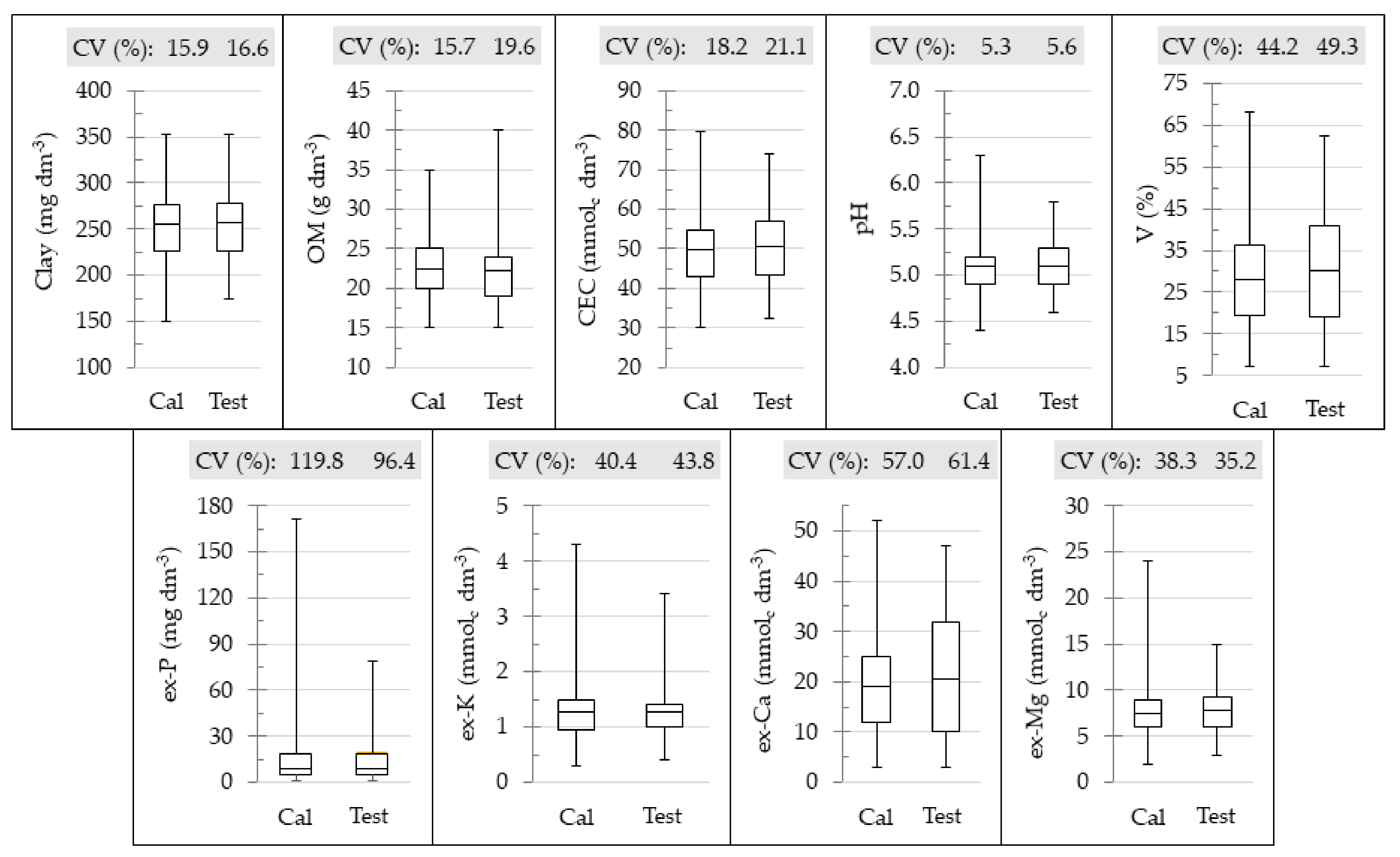
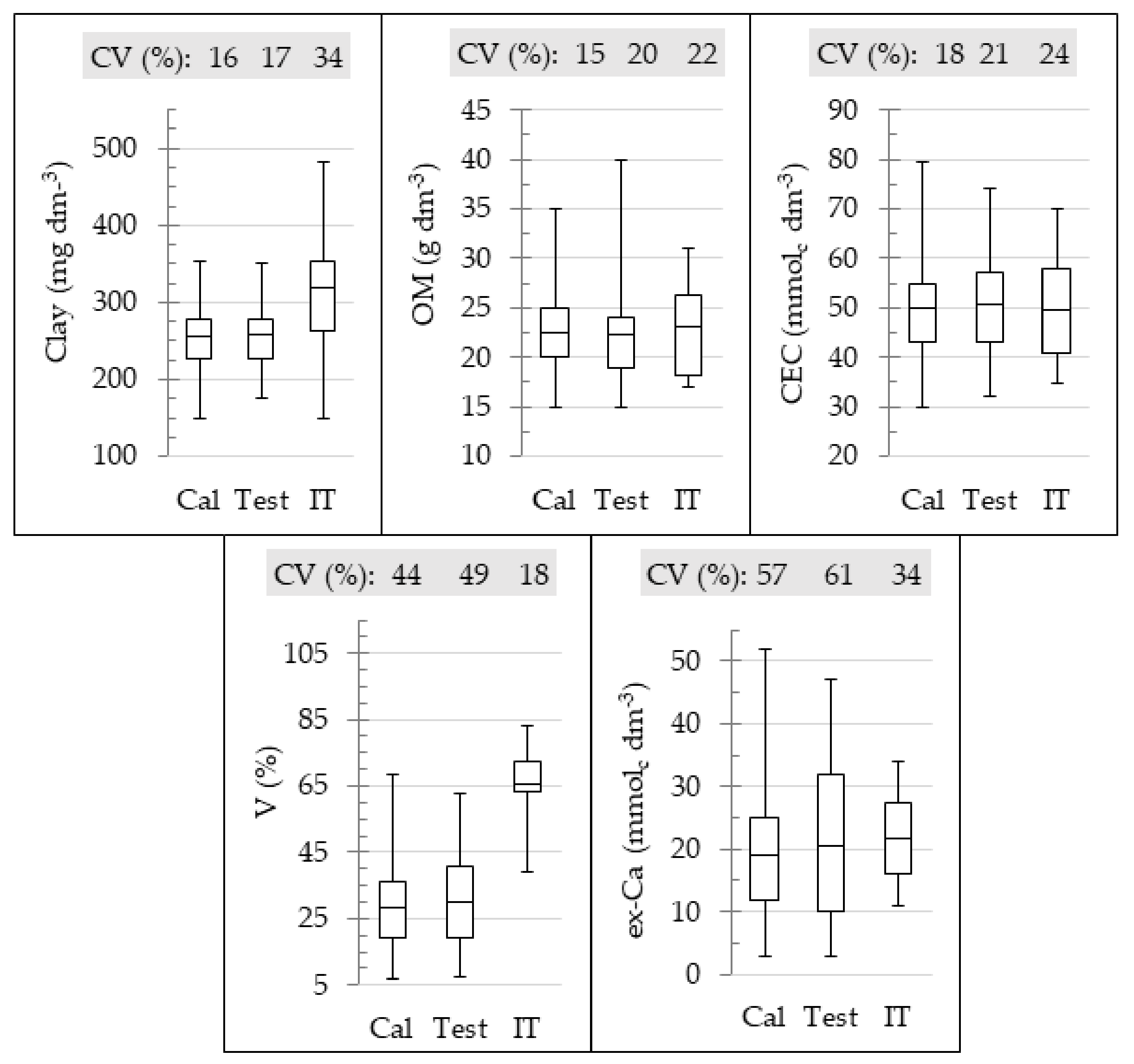
3.1. Laboratory Measured Soil Properties
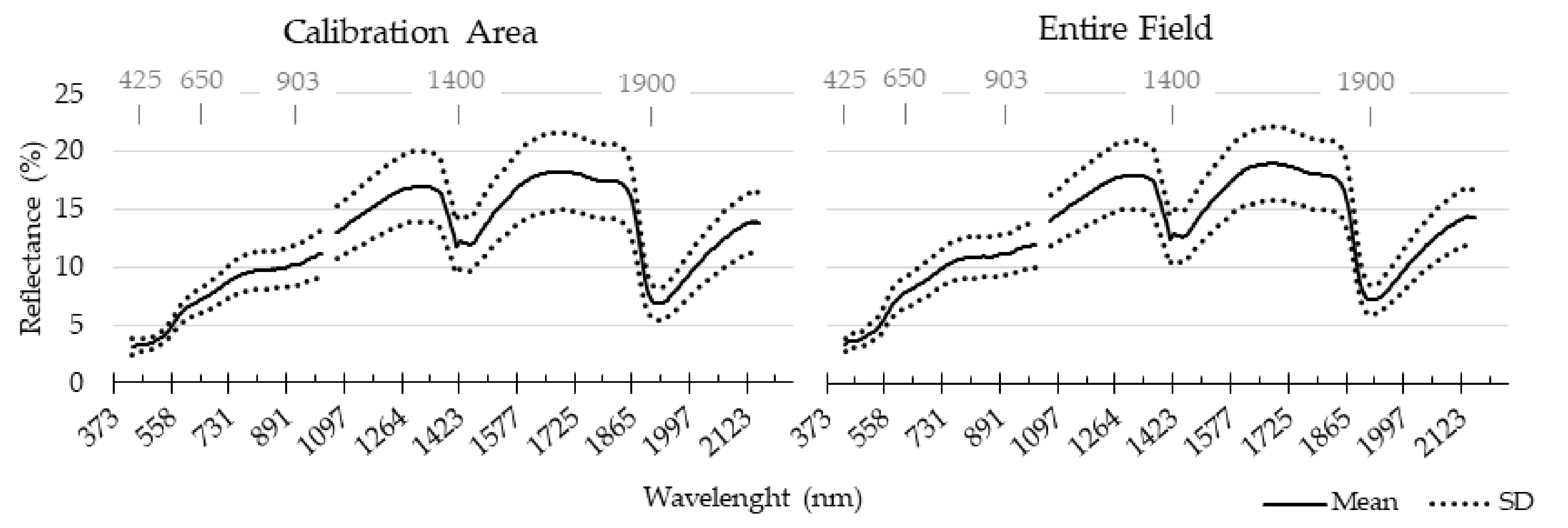
3.2. Descriptive Analysis of Vis–NIR Spectra
3.3. Predictive Performance of Mobile Vis–NIR Spectroscopy in the Calibration Area
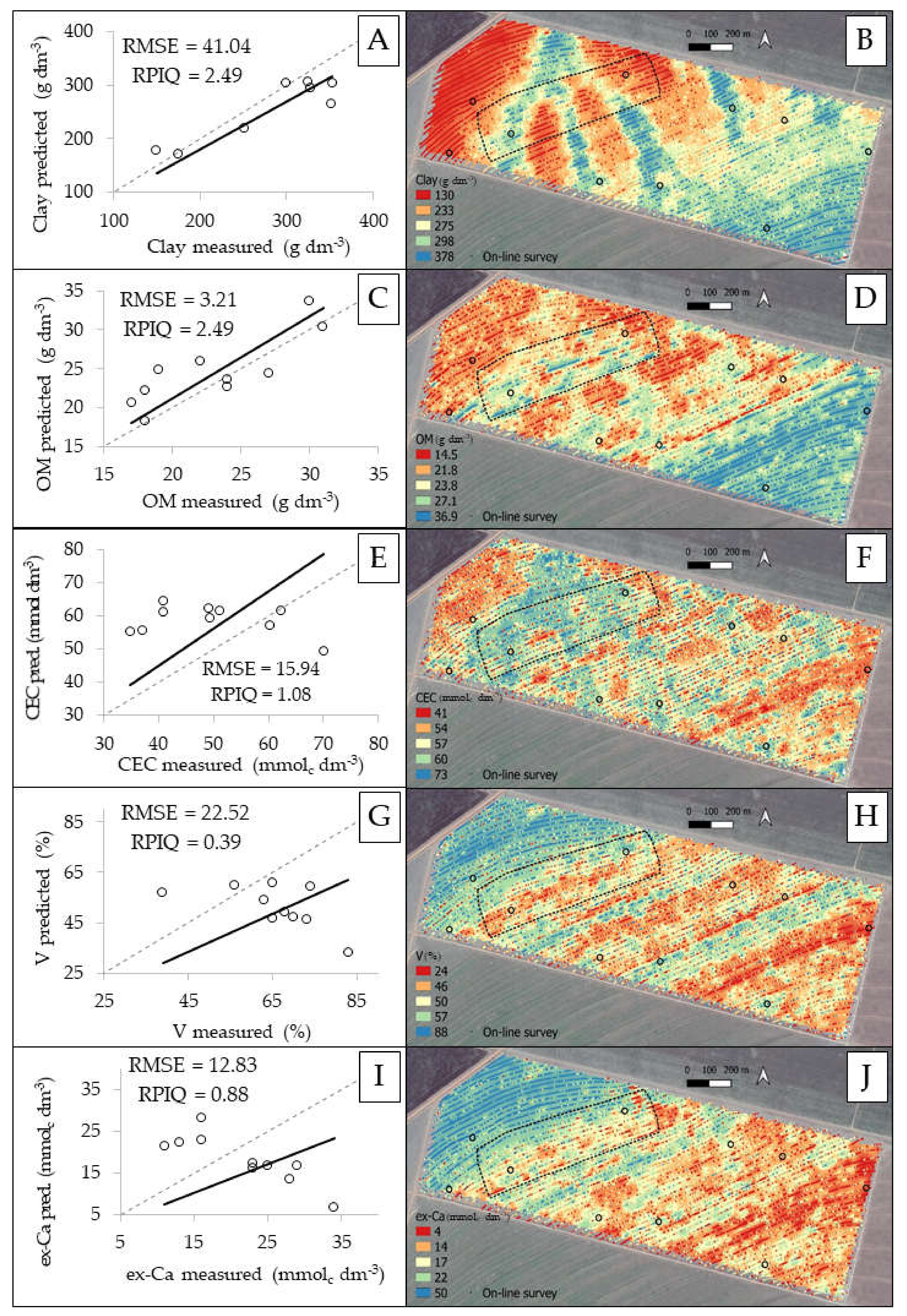
3.4. Prediction Performance of the Independent Test (Using the Spectral Data Acquisition 2)
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Clay | OM 1 | CEC 2 | V 3 | ex-Ca 4 | |
|---|---|---|---|---|---|
| R2 | 0.83 | 0.68 | 0.11 | 0.00 | 0.00 |
| RMSE | 41.04 | 3.21 | 15.94 | 22.52 | 12.83 |
| RMSE % | 14.70 | 13.97 | 32.14 | 34.33 | 58.87 |
| RPIQ 5 | 2.49 | 2.49 | 1.08 | 0.39 | 0.88 |

References
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Nawar, S.; Corstanje, R.; Halcro, G.; Mulla, D.; Mouazen, A.M. Delineation of Soil Management Zones for Variable-Rate Fertilization. Adv. Agron. 2017, 143, 175–245. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Bouma, J. Soil sensing: A new paradigm for agriculture. Agric. Syst. 2016, 148, 71–74. [Google Scholar] [CrossRef]
- Molin, J.P.; Tavares, T.R. Sensor sytems for mapping soil fertility attributes: Challenges, advances, and perspectives in Brazilian tropical soils. Engenharia Agrícola 2019, 39, 126–147. [Google Scholar] [CrossRef] [Green Version]
- FAO. World Fertilizer Trends and Outlook to 2020; Food and Agriculture Organization of the United Nations (FAO): Rome, Italy, 2017. [Google Scholar]
- Molin, J.P. Agricultura de Precisão: Números do Mercado Brasileiro. Available online: https://www.agriculturadeprecisao.org.br/boletim-tecnico-03-agricultura-de-precisao-numeros-do-mercado-brasileiro/ (accessed on 22 December 2021).
- Nanni, M.R.; Povh, F.P.; Demattê, J.A.M.; de Oliveira, R.B.; Chicati, M.L.; Cezar, E. Optimum size in grid soil sampling for variable rate application in site-specific management. Sci. Agric. 2011, 68, 386–392. [Google Scholar] [CrossRef] [Green Version]
- Cherubin, M.R.; Santi, A.L.; Eitelwein, M.T.; Amado, T.J.C.; Simon, D.H.; Damian, J.M. Dimensão da malha amostral para caracterização da variabilidade espacial de fósforo e potássio em Latossolo Vermelho. Pesquisa Agropecuária Brasileira 2015, 50, 168–177. [Google Scholar] [CrossRef] [Green Version]
- Demattê, J.A.M.; Alves, M.R.; Gallo, B.C.; Fongaro, C.T.; E Souza, A.B.; Romero, D.J.; Sato, M.V. Hyperspectral remote sensing as an alternative to estimate soil attributes. Revista Ciência Agronômica 2015, 46, 223–232. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Adamchuk, V.I.; Sudduth, K.A.; McKenzie, N.J.; Lobsey, C. Proximal Soil Sensing: An Effective Approach for Soil Measurements in Space and Time. Adv. Agron. 2011, 113, 243–291. [Google Scholar] [CrossRef]
- Kuang, B.; Mahmood, H.S.; Quraishi, M.Z.; Hoogmoed, W.B.; Mouazen, A.M.; van Henten, E.J. Sensing Soil Properties in the Laboratory, In Situ, and On-Line. Adv. Agron. 2012, 114, 155–223. [Google Scholar] [CrossRef]
- Adamchuk, V.; Hummel, J.; Morgan, M.; Upadhyaya, S. On-the-go soil sensors for precision agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef] [Green Version]
- Cambardella, C.A.; Moorman, T.B.; Novak, J.M.; Parkin, T.B.; Karlen, D.L.; Turco, R.F.; Konopka, A.E. Field-Scale Variability of Soil Properties in Central Iowa Soils. Soil Sci. Soc. Am. J. 1994, 58, 1501–1511. [Google Scholar] [CrossRef]
- Mouazen, A.M.; Maleki, M.R.; De Baerdemaeker, J.; Ramon, H. On-line measurement of some selected soil properties using a VIS–NIR sensor. Soil Tillage Res. 2007, 93, 13–27. [Google Scholar] [CrossRef]
- Ben-Dor, E. Quantitative remote sensing of soil properties. Adv. Agron. 2002, 75, 173–243. [Google Scholar] [CrossRef]
- Abdul Munnaf, M.; Nawar, S.; Mouazen, A.M. Estimation of Secondary Soil Properties by Fusion of Laboratory and On-Line Measured Vis–NIR Spectra. Remote Sens. 2019, 11, 2819. [Google Scholar] [CrossRef] [Green Version]
- Demattê, J.A.M. Characterization and discrimination of soils by their reflected electromagnetic energy. Pesquisa Agropecuária Brasileira 2002, 37, 1445–1458. [Google Scholar] [CrossRef] [Green Version]
- Stenberg, B.; Viscarra Rossel, R.A.; Mouazen, A.M.; Wetterlind, J. Visible and Near Infrared Spectroscopy in Soil Science. Adv. Agron. 2010, 107, 163–215. [Google Scholar] [CrossRef] [Green Version]
- Mouazen, A.M.; Kuang, B. On-line visible and near infrared spectroscopy for in-field phosphorous management. Soil Tillage Res. 2016, 155, 471–477. [Google Scholar] [CrossRef]
- Mouazen, A.M.; Maleki, M.R.; Cockx, L.; Van Meirvenne, M.; Van Holm, L.H.J.; Merckx, R.; De Baerdemaeker, J.; Ramon, H. Optimum three-point linkage set up for improving the quality of soil spectra and the accuracy of soil phosphorus measured using an on-line visible and near infrared sensor. Soil Tillage Res. 2009, 103, 144–152. [Google Scholar] [CrossRef] [Green Version]
- Kodaira, M.; Shibusawa, S. Using a mobile real-time soil visible-near infrared sensor for high resolution soil property mapping. Geoderma 2013, 199, 64–79. [Google Scholar] [CrossRef]
- Nawar, S.; Mouazen, A.M. On-line vis-NIR spectroscopy prediction of soil organic carbon using machine learning. Soil Tillage Res. 2019, 190, 120–127. [Google Scholar] [CrossRef]
- Yang, M.; Xu, D.; Chen, S.; Li, H.; Shi, Z. Evaluation of machine learning approaches to predict soil organic matter and pH using Vis-NIR spectra. Sensors 2019, 19, 263. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Silva, S.H.G.; Ribeiro, B.T.; Guerra, M.B.B.; de Carvalho, H.W.P.; Lopes, G.; Carvalho, G.S.; Guilherme, L.R.G.; Resende, M.; Mancini, M.; Curi, N.; et al. pXRF in tropical soils: Methodology, applications, achievements and challenges. Adv. Agron. 2021, 167, 1–62. [Google Scholar] [CrossRef]
- Hartemink, A.E. Soil Science in Tropical and Temperate Regions—Some Differences and Similarities. Adv. Agron. 2002, 77, 269–292. [Google Scholar] [CrossRef]
- Franceschini, M.H.D.; Demattê, J.A.M.; Kooistra, L.; Bartholomeus, H.; Rizzo, R.; Fongaro, C.T.; Molin, J.P. Effects of external factors on soil reflectance measured on-the-go and assessment of potential spectral correction through orthogonalisation and standardisation procedures. Soil Tillage Res. 2018, 177, 19–36. [Google Scholar] [CrossRef]
- Reeves, J.B. Near- versus mid-infrared diffuse reflectance spectroscopy for soil analysis emphasizing carbon and laboratory versus on-site analysis: Where are we and what needs to be done? Geoderma 2010, 158, 3–14. [Google Scholar] [CrossRef]
- Nawar, S.; Buddenbaum, H.; Hill, J.; Kozak, J.; Mouazen, A.M. Estimating the soil clay content and organic matter by means of different calibration methods of vis-NIR diffuse reflectance spectroscopy. Soil Tillage Res. 2016, 155, 510–522. [Google Scholar] [CrossRef] [Green Version]
- Farifteh, J.; Van der Meer, F.; Atzberger, C.; Carranza, E.J.M. Quantitative analysis of salt-affected soil reflectance spectra: A comparison of two adaptive methods (PLSR and ANN). Remote Sens. Environ. 2007, 110, 59–78. [Google Scholar] [CrossRef]
- Vasques, G.M.; Grunwald, S.; Sickman, J.O. Comparison of multivariate methods for inferential modeling of soil carbon using visible/near-infrared spectra. Geoderma 2008, 146, 14–25. [Google Scholar] [CrossRef]
- Vohland, M.; Besold, J.; Hill, J.; Fründ, H.-C. Comparing different multivariate calibration methods for the determination of soil organic carbon pools with visible to near infrared spectroscopy. Geoderma 2011, 166, 198–205. [Google Scholar] [CrossRef]
- Nawar, S.; Mouazen, A.M. Predictive performance of mobile vis-near infrared spectroscopy for key soil properties at different geographical scales by using spiking and data mining techniques. CATENA 2017, 151, 118–129. [Google Scholar] [CrossRef] [Green Version]
- Kuang, B.; Tekin, Y.; Mouazen, A.M. Comparison between artificial neural network and partial least squares for on-line visible and near infrared spectroscopy measurement of soil organic carbon, pH and clay content. Soil Tillage Res. 2015, 146, 243–252. [Google Scholar] [CrossRef]
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; de Moraes Gonçalves, J.L.; Sparovek, G. Köppen’s climate classification map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2014, Update 2015: International Soil Classification System for Naming Soils and Creating Legends for Soil Maps; FAO: Rome, Italy, 2015; ISBN 978-92-5-108369-7. [Google Scholar]
- Demattê, J.A.; Campos, R.C.; Alves, M.C.; Fiorio, P.R.; Nanni, M.R. Visible–NIR reflectance: A new approach on soil evaluation. Geoderma 2004, 121, 95–112. [Google Scholar] [CrossRef]
- Van Raij, B.; Andrade, J.C.; Cantarela, H.; Quaggio, J.A. Análise Química Para Avaliação de Solos Tropicais; IAC: Campinas, Brazil, 2001. [Google Scholar]
- Kennard, R.W.; Stone, L.A. Computer Aided Design of Experiments. Technometrics 1969, 11, 137–148. [Google Scholar] [CrossRef]
- Kawamura, K.; Tsujimoto, Y.; Rabenarivo, M.; Asai, H.; Andriamananjara, A.; Rakotoson, T. Vis-NIR Spectroscopy and PLS Regression with Waveband Selection for Estimating the Total C and N of Paddy Soils in Madagascar. Remote Sens. 2017, 9, 1081. [Google Scholar] [CrossRef] [Green Version]
- Bellon-Maurel, V.; Fernandez-Ahumada, E.; Palagos, B.; Roger, J.-M.; McBratney, A. Critical review of chemometric indicators commonly used for assessing the quality of the prediction of soil attributes by NIR spectroscopy. TrAC Trends Anal. Chem. 2010, 29, 1073–1081. [Google Scholar] [CrossRef]
- Nawar, S.; Mouazen, A.M. Optimal sample selection for measurement of soil organic carbon using on-line vis-NIR spectroscopy. Comput. Electron. Agric. 2018, 151, 469–477. [Google Scholar] [CrossRef]
- Minasny, B.; McBratney, A.B.; Whelan, B.M. 2005. VESPER, version 1.62; Australian Centre for Precision Agriculture, McMillan Building A05; The University of Sydney: Camperdown, NSW, Australia, 2006. [Google Scholar]
- Lacerda, M.; Demattê, J.; Sato, M.; Fongaro, C.; Gallo, B.; Souza, A. Tropical Texture Determination by Proximal Sensing Using a Regional Spectral Library and Its Relationship with Soil Classification. Remote Sens. 2016, 8, 701. [Google Scholar] [CrossRef] [Green Version]
- Bellinaso, H.; Demattê, J.A.M.; Romeiro, S.A. Soil spectral library and its use in soil classification. Revista Brasileira de Ciência do Solo 2010, 34, 861–870. [Google Scholar] [CrossRef] [Green Version]
- Ulusoy, Y.; Tekin, Y.; Tümsavaş, Z.; Mouazen, A.M. Prediction of soil cation exchange capacity using visible and near infrared spectroscopy. Biosyst. Eng. 2016, 152, 79–93. [Google Scholar] [CrossRef]
- Tavares, T.R.; Molin, J.P.; Javadi, S.H.; de Carvalho, H.W.P.; Mouazen, A.M. Combined use of vis-nir and xrf sensors for tropical soil fertility analysis: Assessing different data fusion approaches. Sensors 2021, 21, 148. [Google Scholar] [CrossRef] [PubMed]
- Tavares, T.R.; Molin, J.P.; Nunes, L.C.; Wei, M.C.F.; Krug, F.J.; de Carvalho, H.W.P.; Mouazen, A.M. Multi-Sensor Approach for Tropical Soil Fertility Analysis: Comparison of Individual and Combined Performance of VNIR, XRF, and LIBS Spectroscopies. Agronomy 2021, 11, 1028. [Google Scholar] [CrossRef]
- Mitchell, J.B.O. Machine learning methods in chemoinformatics. WIREs Comput. Mol. Sci. 2014, 4, 468–481. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Viscarra Rossel, R.A.; Behrens, T. Using data mining to model and interpret soil diffuse reflectance spectra. Geoderma 2010, 158, 46–54. [Google Scholar] [CrossRef]
- Panchuk, V.; Yaroshenko, I.; Legin, A.; Semenov, V.; Kirsanov, D. Application of chemometric methods to XRF-data—A tutorial review. Anal. Chim. Acta 2018, 1040, 19–32. [Google Scholar] [CrossRef]
- McBride, M.B. Estimating soil chemical properties by diffuse reflectance spectroscopy: Promise versus reality. Eur. J. Soil Sci. 2021, 73, e13192. [Google Scholar] [CrossRef]
- Kerry, R.; Escolà, A. Conclusions: Future Directions in Sensing for Precision Agriculture. In Sensing Approaches for Precision Agriculture; Kerry, R., Escolà, A., Eds.; Springer: Cham, Switzerland, 2021; pp. 399–407. ISBN 978-3-030-78431-7. [Google Scholar]
- Roger, J.-M.; Chauchard, F.; Bellon-Maurel, V. EPO–PLS external parameter orthogonalisation of PLS application to temperature-independent measurement of sugar content of intact fruits. Chemom. Intell. Lab. Syst. 2003, 66, 191–204. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Dean, T.; Kowalski, B.R. Additive Background Correction in Multivariate Instrument Standardization. Anal. Chem. 1995, 67, 2379–2385. [Google Scholar] [CrossRef]





| Clay | OM 1 | CEC 2 | pH | V 3 | ex-Ca 4 | ex-Mg 4 | ex-K 4 | ex-P 4 | |
|---|---|---|---|---|---|---|---|---|---|
| Spatial Statistics: | |||||||||
| Nugget effect | 173.10 | 6.65 | 33.00 | 0.01 | 30.00 | 20.00 | 2.80 | 0.10 | PNE 7 |
| Sill | 2050.20 | 17.09 | 89.50 | 0.07 | 296.90 | 127.30 | 8.10 | 0.30 | PNE 7 |
| Range 5 | 176 | 113 | 100 | 35 | 55 | 56 | 47 | 42 | PNE 7 |
| SDD 6 * | 8.40 | 38.90 | 36.90 | 14.30 | 10.10 | 15.70 | 34.80 | 32.30 | - |
| Correlation Matrix: | |||||||||
| Clay | 1.00 | ||||||||
| OM | 0.27 | 1.00 | |||||||
| CEC | 0.35 | 0.30 | 1.00 | ||||||
| pH | −0.01 | 0.10 | 0.18 | 1.00 | |||||
| V | 0.08 | −0.17 | 0.56 | 0.50 | 1.00 | ||||
| ex-Ca | 0.01 | 0.13 | 0.17 | −0.14 | −0.08 | 1.00 | |||
| ex-Mg | 0.20 | 0.14 | 0.19 | −0.08 | −0.06 | 0.37 | 1.00 | ||
| ex-K | 0.16 | −0.08 | 0.80 | 0.31 | 0.90 | 0.01 | −0.06 | 1.00 | |
| ex-P | 0.17 | 0.22 | 0.43 | 0.69 | 0.52 | 0.04 | −0.11 | 0.08 | 1.00 |
| Clay | OM 1 | CEC 2 | pH | V 3 | ex-Ca 4 | ex-Mg 4 | ex-K 4 | ex-P 4 | |
|---|---|---|---|---|---|---|---|---|---|
| ANN Calibration (n = 295): | |||||||||
| R2 | 0.89 | 0.66 | 0.69 | 0.32 | 0.82 | 0.76 | 0.48 | 0.50 | 0.29 |
| RMSE | 13.15 | 1.78 | 4.15 | 0.23 | 7.11 | 5.51 | 2.07 | 0.39 | 14.46 |
| RMSE % | 6.48 | 11.12 | 8.36 | 12.22 | 9.61 | 11.24 | 9.41 | 11.40 | 8.71 |
| RPIQ | 3.9 | 2.8 | 2.9 | 1.3 | 3.9 | 2.9 | 1.4 | 1.3 | 0.6 |
| ANN Test (n = 52): | |||||||||
| R2 | 0.77 | 0.57 | 0.55 | 0.10 | 0.65 | 0.69 | 0.23 | 0.14 | 0.12 |
| RMSE | 19.89 | 2.32 | 7.24 | 0.24 | 10.27 | 7.14 | 2.92 | 0.55 | 18.11 |
| RMSE % | 9.80 | 14.53 | 14.60 | 12.84 | 13.88 | 14.57 | 13.25 | 16.21 | 10.91 |
| RPIQ | 2.6 | 2.2 | 1.7 | 1.2 | 2.7 | 2.2 | 1.0 | 0.9 | 0.4 |
| PLS Calibration (n = 295): | |||||||||
| R2 | 0.76 | 0.48 | 0.41 | 0.01 | 0.59 | 0.69 | 0.06 | 0.04 | 0.01 |
| RMSE | 20.06 | 2.53 | 6.98 | 0.27 | 10.37 | 6.11 | 2.79 | 0.51 | 20.47 |
| RMSE % | 9.88 | 12.67 | 14.07 | 14.26 | 14.01 | 12.47 | 12.69 | 12.73 | 12.33 |
| RPIQ | 2.5 | 2.0 | 1.7 | 1.1 | 2.6 | 2.1 | 1.1 | 1.1 | 0.4 |
| n VL | 9 | 8 | 9 | 1 | 11 | 14 | 3 | 1 | 1 |
| PLS Test (n = 52): | |||||||||
| R2 | 0.75 | 0.29 | 0.52 | 0.00 | 0.49 | 0.67 | 0.08 | 0.01 | 0.03 |
| RMSE | 21.64 | 3.65 | 7.42 | 0.28 | 12.71 | 7.23 | 2.60 | 0.55 | 15.84 |
| RMSE % | 10.66 | 18.24 | 14.96 | 14.84 | 17.18 | 14.76 | 11.83 | 13.87 | 9.54 |
| RPIQ | 2.4 | 1.4 | 1.6 | 1.1 | 2.1 | 1.8 | 1.2 | 1.0 | 0.6 |
| n VL 5 | 9 | 8 | 9 | 1 | 11 | 14 | 3 | 1 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eitelwein, M.T.; Tavares, T.R.; Molin, J.P.; Trevisan, R.G.; de Sousa, R.V.; Demattê, J.A.M. Predictive Performance of Mobile Vis–NIR Spectroscopy for Mapping Key Fertility Attributes in Tropical Soils through Local Models Using PLS and ANN. Automation 2022, 3, 116-131. https://doi.org/10.3390/automation3010006
Eitelwein MT, Tavares TR, Molin JP, Trevisan RG, de Sousa RV, Demattê JAM. Predictive Performance of Mobile Vis–NIR Spectroscopy for Mapping Key Fertility Attributes in Tropical Soils through Local Models Using PLS and ANN. Automation. 2022; 3(1):116-131. https://doi.org/10.3390/automation3010006
Chicago/Turabian StyleEitelwein, Mateus Tonini, Tiago Rodrigues Tavares, José Paulo Molin, Rodrigo Gonçalves Trevisan, Rafael Vieira de Sousa, and José Alexandre Melo Demattê. 2022. "Predictive Performance of Mobile Vis–NIR Spectroscopy for Mapping Key Fertility Attributes in Tropical Soils through Local Models Using PLS and ANN" Automation 3, no. 1: 116-131. https://doi.org/10.3390/automation3010006
APA StyleEitelwein, M. T., Tavares, T. R., Molin, J. P., Trevisan, R. G., de Sousa, R. V., & Demattê, J. A. M. (2022). Predictive Performance of Mobile Vis–NIR Spectroscopy for Mapping Key Fertility Attributes in Tropical Soils through Local Models Using PLS and ANN. Automation, 3(1), 116-131. https://doi.org/10.3390/automation3010006