The Stability of Systems with Command Saturation, Command Delay, and State Delay


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Equating the stability of a system with state delay and input delay (point or distributed) with the stability of a system without delay by using the Arstein transform (and its generalization in case of delay in the state);
- Obtaining the command (input) of the initial system with delay by applying the inverse transform to the equivalent system without delay, in case of input saturation;
- Obtaining theorems on the stability of mono- and multiple-input systems, theorems on instability and the estimation of the stability region for systems with state delay and input delay (point or distributed) and input saturation. The main results are synthesized in twelve new theorems;
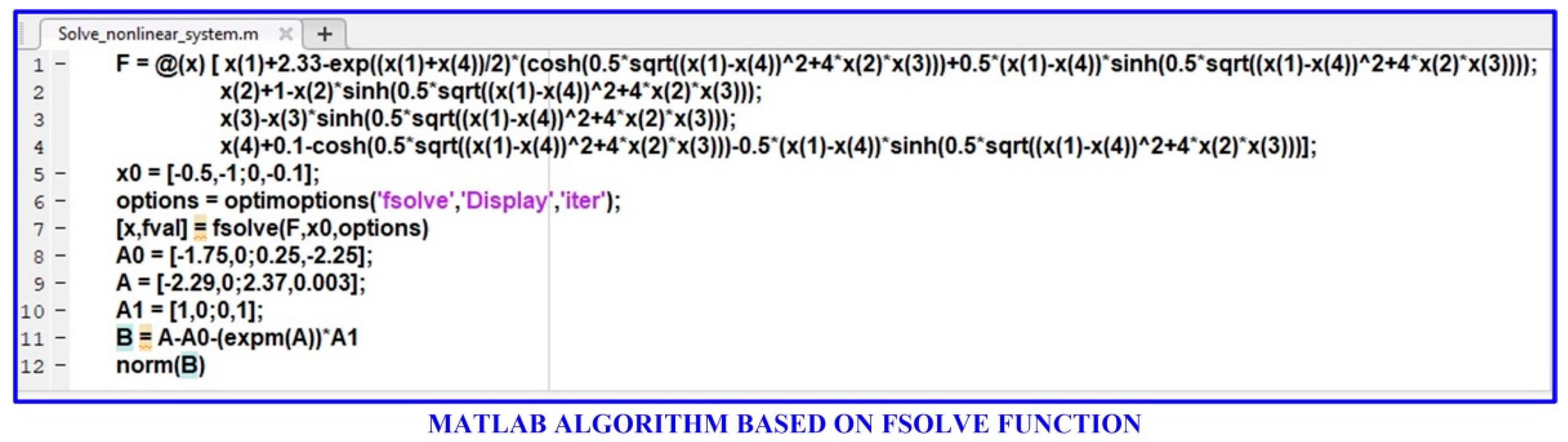
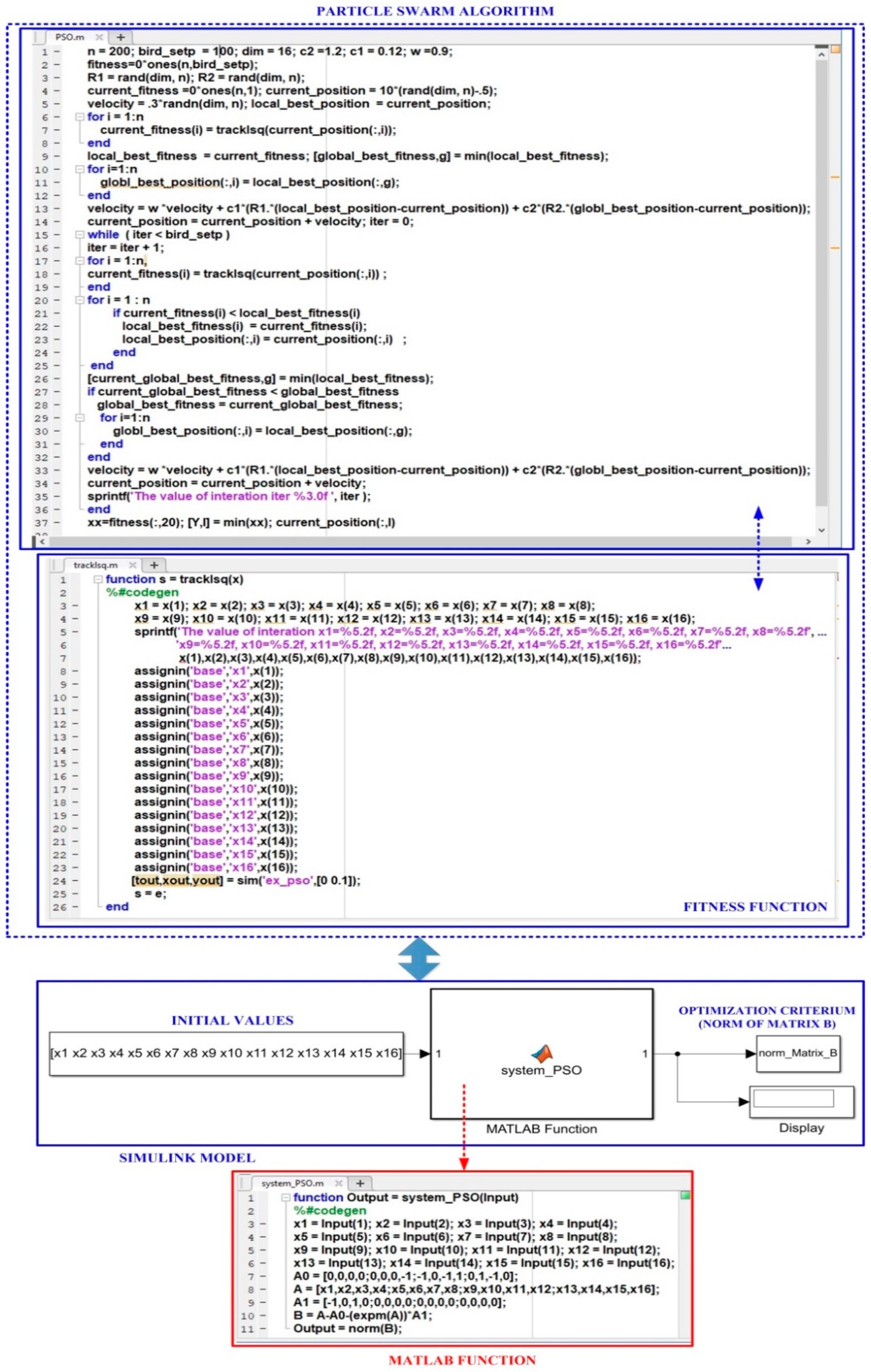
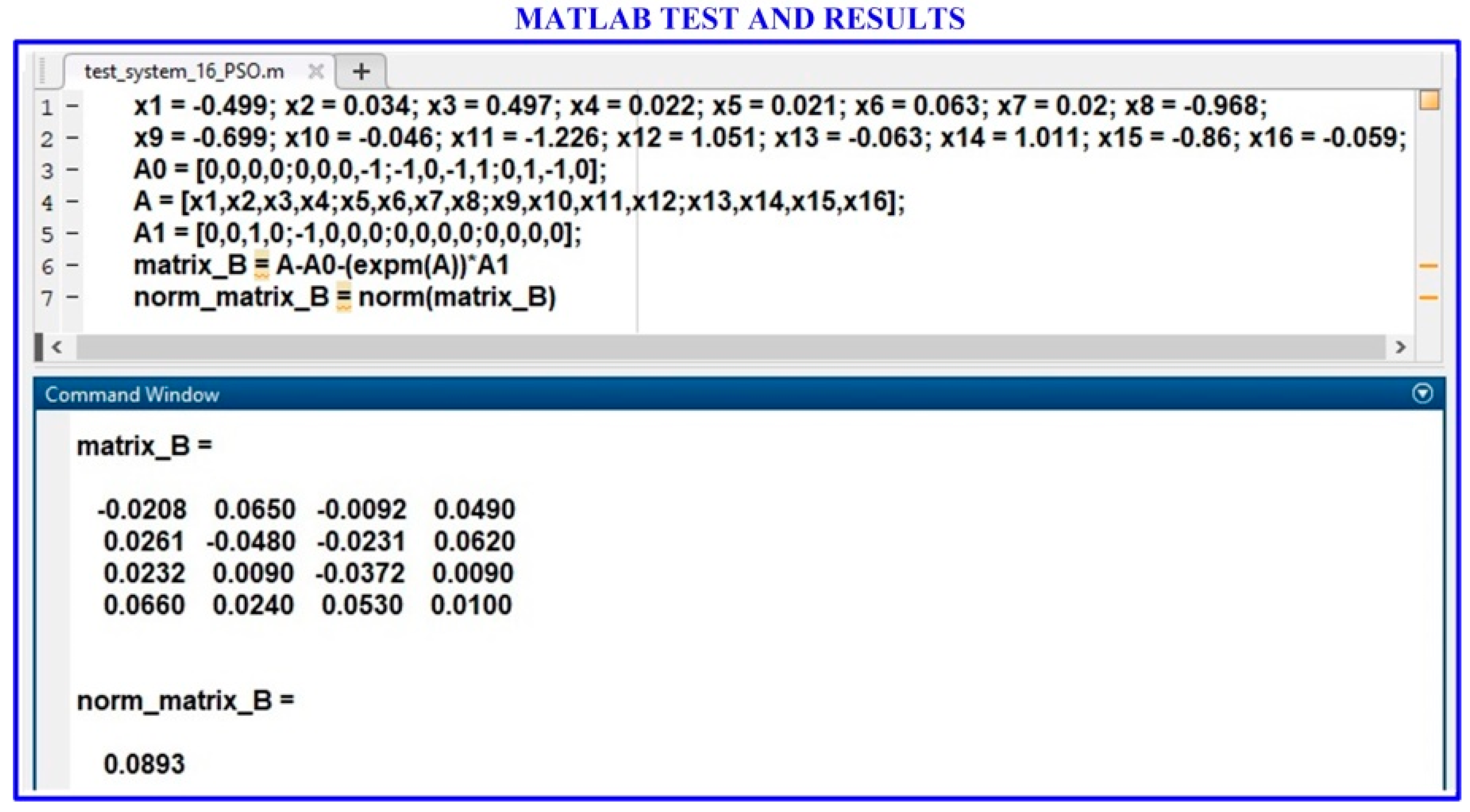
- A numerical solution to the transcendental matrix equation using the computational-intelligence PSO algorithm.
2. Systems with Saturation in Command
- 1.
- The open-loop system A is exponentially stable and diagonalizable;
- 2.
- The matrix is exponentially stable and diagonalizable;
- 3.
- The matrices A and BK commute under multiplication.
- 1.
- A and are exponentially stable;
- 2.
- is diagonalizable;
- 3.
- commutes with P, where is the diagonal form of and solve: .
- 1.
- Matrix A is unstable;
- 2.
- Matrix is exponentially stable.
3. Systems with Command Saturation, Saturation Delay, and State Delay
3.1. Systems with Point Delays
3.2. Systems with Distributed Delay
4. Main Results
4.1. Systems with Point Delays and Command Saturation
- 1.
- The matrix A is exponentially stable and diagonalizable;
- 2.
- The matrix is exponentially stable and diagonalizable;
- 3.
- The matrices A and commute under multiplication.
- 1.
- A and are exponentially stable;
- 2.
- is diagonalizable;
- 3.
- commutes with P, where is the diagonal form of , and solves: .
- 1.
- Matrix A is unstable, and all unstable eigenvalues of system (7) are contained in the spectrum of the matrix A;
- 2.
- Matrix is exponentially stable.
4.2. Systems with Distributed Delays and Command Saturation
- 1.
- The matrix A is exponentially stable and diagonalizable;
- 2.
- The matrix is exponentially stable and diagonalizable;
- 3.
- The matrices A and commute under multiplication.
- 1.
- A and are exponentially stable;
- 2.
- is diagonalizable;
- 3.
- commutes with P, where is the diagonal form of , and solves: .
- 1.
- Matrix A is unstable, and all the unstable eigenvalues of the system (27) are contained in the spectrum of the matrix A;
- 2.
- Matrix is exponentially stable.
5. Examples and Discussions
5.1. Example 1
5.2. Example 2
5.3. Example 3
5.4. Example 4
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
Appendix A
References
- Kolmanovskii, V.; Myshkis, A. Applied Theory of Functional Differential Equations; Kluwer Academic Press Publisher: Dordrecht, The Netherlands, 1992. [Google Scholar]
- Artstein, Z. Linear Systems with Delayed Controls: A reduction. IEEE Trans. Autom. Control 1982, 27, 869–879. [Google Scholar] [CrossRef]
- Aström, K.J.; Kumar, P.R. Control: A perspective. Automatica 2014, 50, 3–43. [Google Scholar] [CrossRef]
- Young, S.M.; Gyeon, P.P.; Wook, H.K. Robust Stabilization of Uncertain Input-Delayed Systems Using Reduction Method. Automatica 2001, 37, 307–312. [Google Scholar]
- Halevi, Y. Reduced-order models with delay. Int. J. Control 1996, 64, 733–744. [Google Scholar] [CrossRef]
- Phoojaruenchanachai, S.; Uahchinkul, K.; Prempraneerach, Y. Robust Stabilization of State Delayed System. EE Proc.-Control Theory Appl. 1998, 145, 87–91. [Google Scholar] [CrossRef]
- Moon, Y.S.; Park, P.; Kwon, W.H.; Lee, Y.S. Delay-Dependent Robust Stabilization of Uncertain State-Delayed Systems. Int. J. Control 2001, 74, 1447–1455. [Google Scholar] [CrossRef]
- Xie, L.; Fridman, E.; Shaked, U. Robust H∞ Control of Distributed Delay Systems with Application to Combustion Control. IEEE Trans. Autom. Control 2001, 46, 1930–1935. [Google Scholar] [CrossRef]
- Asl, F.M.; Ulsoy, A.G. Analysis of a System of Linear Delay Differential Equations. J. Dyn. Syst. Meas. Control 2003, 125, 215–223. [Google Scholar] [CrossRef]
- Ochoa, G.; Mondié, S.; Kharitonov, V.L. Time Delay Systems with Distributed Delays: Critical Values. IFAC Proc. Vol. 2009, 42, 272–277. [Google Scholar] [CrossRef]
- Chen, C.-T.; Peng, S.-T. A sliding mode control scheme for non-minimum phase non-linear uncertain input-delay chemical processes. J. Process Control 2006, 16, 37–51. [Google Scholar] [CrossRef]
- Ge, S.S.; Tee, K.P. Approximation-Based Control of Nonlinear MIMO Time-Delay Systems. Automatica 2007, 43, 31–43. [Google Scholar] [CrossRef]
- Gouaisbaut, F.; Ariba, Y. Delay Range Stability of Distributed Time Delay Systems. Syst. Control Lett. 2011, 60, 211–217. [Google Scholar] [CrossRef]
- Hetel, L.; Daafouz, J.; Richard, J.P.; Jungers, M. Delay-Dependent Sampled-Data Control Based on Delay Estimates. Syst. Control Lett. 2011, 60, 146–150. [Google Scholar] [CrossRef]
- Michiels, W.; Van Assche, V.; Niculescu, S.I. Stabilization of Time-Delay Systems with a Controlled Time-varying Delay and Applications. IEEE Trans. Autom. Control 2005, 50, 493–504. [Google Scholar] [CrossRef]
- Matausek, M.R.; Sekara, T.B. PID Controller Frequency-Domain Tuning for Stable, Integrating and Unstable Processes, Including Dead-Time. J. Process Control 2011, 21, 17–27. [Google Scholar] [CrossRef]
- Du, Y.Y.; Tsai, J.S.H.; Patil, H.; Shieh, L.S.; Chen, Y. Indirect Identification of Continuous-Time Delay Systems from Step Responses. Appl. Math. Model. 2011, 35, 594–611. [Google Scholar] [CrossRef]
- Liu, M.; Wang, Q.G.; Huang, B.; Hang, C.C. Improved Identification of Continuous-Time Delay Processes from Piecewise Step Tests. J. Process Control 2007, 17, 51–57. [Google Scholar] [CrossRef]
- Mukhija, P.; Kar, I.N.; Bhatt, R.K.P. Delay-distribution-dependent Robust Stability Analysis of Uncertain Lurie Systems with Time-varying Delay. Acta Autom. Sin. 2012, 38, 1100–1107. [Google Scholar] [CrossRef]
- Rasvan, V.; Popescu, D.; Danciu, D. Stability and Asymptotic Behavior of the Systems with Delay and Bounded Nonlinearity. IFAC Proc. Vol. 2009, 8, 178–182. [Google Scholar] [CrossRef]
- Kwon, W.H.; Kang, J.W.; Lee, Y.S.; Moon, Y.S. A Simple Receding Horizon Control for State Delayed Systems and its Stability Criterion. J. Process Control 2003, 13, 539–551. [Google Scholar] [CrossRef]
- Wang, Z.; Ho, D.W.C. Filtering on Nonlinear Time-Delay Stochastic Systems. Automatica 2003, 39, 101–109. [Google Scholar] [CrossRef]
- Ionete, C.; Cela, A.; Gaid, M.B.; Reama, A. Controllability and Observability of Linear Discrete-Time Systems with Network Induced Variable Delay. IFAC Proc. Vol. 2008, 17, 4216–4221. [Google Scholar] [CrossRef]
- Witrant, E.; Canudas-De-Wit, C.; Georges, D. Remote Output Stabilization Under Two Channels Time-varying Delays. IFAC Proc. Vol. 2003, 36, 135–140. [Google Scholar] [CrossRef]
- Lam, J.; Gao, H.; Wang, C. Stability Analysis for Continuous Systems with Two Additive Time-varying Delay Components. Syst. Control Lett. 2007, 56, 16–24. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, S.; Zhang, B. New Delay-Dependent Robust Stability Criteria for Uncertain Neutral Systems with Mixed Delays. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 6114–6118. [Google Scholar]
- Chen, W.H.; Zheng, W.X. Delay-Dependent Robust Stabilization for Uncertain Neutral Systems with Distributed Delays. Automatica 2007, 43, 95–104. [Google Scholar] [CrossRef]
- Mondie, S.; Lozano, R.; Mazenc, F. Semiglobal Stabilization of Continuous Systems with Bounded Delayed Inputs. IFAC Proc. Vol. 2002, 15, 83–88. [Google Scholar] [CrossRef]
- He, Y.; Chen, B.; Wu, C. Improving Transient Performance in Tracking Control for Linear Multivariable Discrete-Time Systems with Input Saturation. Syst. Control Lett. 2007, 56, 25–33. [Google Scholar] [CrossRef]
- Corradini, M.L.; Orlando, G. Linear Unstable Plants with Saturating Actuators: Robust Stabilization by a Time Varying Sliding Surface. Automatica 2007, 43, 88–94. [Google Scholar] [CrossRef]
- Tarbouriech, S.; Queinnec, I.; Turner, M.C. Anti-Windup Design with Rate and Magnitude Actuator and Sensors Saturation. In Proceedings of the European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 330–335. [Google Scholar]
- Tarbouriech, S.; Gomes, J.M. Synthesis of Controllers for Continous-Time Delay Systems with Saturating Controls via LMI’s. IEEE Trans. Autom. Control 2000, 45, 105–110. [Google Scholar] [CrossRef]
- Niculescu, I.S.; Dion, J.M.; Dugard, L. Robust Stabilization for Uncertain Time-Delay Systems Containing Saturating Actuators. IEEE Trans. Autom. Control 1996, 41, 742–746. [Google Scholar] [CrossRef]
- Zheng, F.; Cheng, M.; Gao, W.B. Feedback Stabilization of Linear Systems with Distribuited Delays in State and Control Variables. IEEE Trans. Autom. Control 1994, 39, 1714–1717. [Google Scholar] [CrossRef]
- Zheng, F.; Frank, P.M. Finite Dimensional Variable Structure Control Design for Distributed Delay Systems. J. Process Control 2001, 74, 398–408. [Google Scholar] [CrossRef]
- Nicola, M. Systems with Saturation in Command—Applications to the Systems with Delay in Command. Ph.D. Thesis, University of Craiova, Craiova, Romania, 2004. [Google Scholar]
- Pearson, A.E.; Fiagbedzi, Y.A. An Observer for Time Lag Systems. IEEE Trans. Autom. Control 1989, 34, 775–7777. [Google Scholar] [CrossRef]
- Fiagbedzi, Y.A.; Pearson, A.E. A Multistage Reduction Technique for Feedback Stabilizing Distributed Time-Lag Systems. Automatica 1987, 23, 311–326. [Google Scholar] [CrossRef]
- Fiagbedzi, Y.A.; Pearson, A.E. Feedback stabilization of linear autonomus time lag systems. IEEE Trans. Autom. Control 1986, 31, 847–855. [Google Scholar] [CrossRef]
- Lee, W.; Hedrick, J. Some New Results on Closed-Loop in Stability in the Presence of Control Saturation. J. Process Control 1995, 62, 619–631. [Google Scholar] [CrossRef]
- Tarbouriech, S.; Burgat, C. Comments on the Paper “Some New Results on Closed-Loop Stability in the Presence of Control Saturation”. J. Process Control 1997, 68, 1203–1207. [Google Scholar]
- Barreau, M.; Tarbouriech, S.; Gouaisbaut, F. Lyapunov Stability Analysis of a Mass–spring System Subject to Friction. Syst. Control Lett. 2021, 150, 104910. [Google Scholar] [CrossRef]
- Zhou, B.; Zheng, W.X.; Duan, G.-R. An Improved Treatment of Saturation Nonlinearity with its Application to Control of Systems Subject to Nested Saturation. Automatica 2011, 47, 306–315. [Google Scholar] [CrossRef]
- Modir, A.; Tansel, I. Wave Propagation and Structural Health Monitoring Application on Parts Fabricated by Additive Manufacturing. Automation 2021, 2, 173. [Google Scholar] [CrossRef]
- Ribas Neto, A.; Fajardo, J.; da Silva, W.H.A.; Gomes, M.K.; de Castro, M.C.F.; Fujiwara, E.; Rohmer, E. Design of Tendon-Actuated Robotic Glove Integrated with Optical Fiber Force Myography Sensor. Automation 2021, 2, 187. [Google Scholar] [CrossRef]
- Coito, T.; Firme, B.; Martins, M.S.E.; Vieira, S.M.; Figueiredo, J.; Sousa, J.M.C. Intelligent Sensors for Real-Time Decision-Making. Automation 2021, 2, 62. [Google Scholar] [CrossRef]
- Pasqualotto, D.; Tinazzi, F.; Zigliotto, M. Model-Free Current Loop Autotuning for Synchronous Reluctance Motor Drives. Automation 2020, 1, 33. [Google Scholar] [CrossRef]
- Minzu, V. Optimal Control Implementation with Terminal Penalty Using Metaheuristic Algorithms. Automation 2020, 1, 48. [Google Scholar] [CrossRef]
- Zenteno-Torres, J.; Cieslak, J.; Dávila, J.; Henry, D. Sliding Mode Control with Application to Fault-Tolerant Control: Assessment and Open Problems. Automation 2021, 2, 1. [Google Scholar] [CrossRef]
- Pizetta, I.H.B.; Brandão, A.S.; Sarcinelli-Filho, M. UAV Thrust Model Identification Using Spectrogram Analysis. Automation 2021, 2, 141. [Google Scholar] [CrossRef]
- Schiffer, J.; Fridman, E.; Ortega, R.; Raisch, J. Stability of a Class of Delayed Port-Hamiltonian Systems with Application to Microgrids with Distributed Rotational and Electronic Generation. Automatica 2016, 74, 71–79. [Google Scholar] [CrossRef]
- Schiffer, J.; Fridman, E.; Ortega, R. Stability of a Class of Delayed Port-Hamiltonian Systems with Application to Droop-Controlled Microgrids. In Proceedings of the 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 6391–6396. [Google Scholar]
- Javadi, A.; Jahed-Motlagh, M.R.; Jalali, A.A. Robust H∞ Control of Stochastic Linear Systems with Input Delay by Predictor Feedback. Trans. Inst. Meas. Control 2010, 40, 2396–2407. [Google Scholar] [CrossRef]
- Tan, C.; Yang, L.; Zhang, F.; Zhang, Z.; Wong, W.S. Stabilization of Discrete Time Stochastic System with Input Delay and Control Dependent Noise. Syst. Control Lett. 2019, 123, 62–68. [Google Scholar] [CrossRef]
- Yuan, H. Some Properties of Numerical Solutions for Semilinear Stochastic Delay Differential Equations Driven by G-Brownian Motion. Math. Probl. Eng. 2021, 2021, 1835490. [Google Scholar] [CrossRef]
- Liu, Z.; Karimi, H.R.; Yu, J. Passivity-Based Robust Sliding Mode Synthesis for uncertain Delayed Stochastic Systems via State Observer. Automatica 2020, 111, 108596. [Google Scholar] [CrossRef]
- Zhao, Z.; Ge, W. Traveling Wave Solutions for Schrödinger Equation with Distributed Delay. Appl. Math. Model. 2011, 35, 675–687. [Google Scholar] [CrossRef]
- Wang, B.; Jahanshahi, H.; Volos, C.; Bekiros, S.; Khan, M.A.; Agarwal, P.; Aly, A.A. A New RBF Neural Network-Based Fault-Tolerant Active Control for Fractional Time-Delayed Systems. Electronics 2021, 10, 1501. [Google Scholar] [CrossRef]
- Effati, S.; Ranjbar, M.; Wong, W.S. A Novel Recurrent Nonlinear Neural Network for Solving Quadratic Programming Problems. Appl. Math. Model. 2011, 35, 1688–1695. [Google Scholar] [CrossRef]
- Ensari, T.; Arik, S. Global Stability Analysis of Neural Networks with Multiple Time-varying Delays. IEEE Trans. Autom. Control 2005, 50, 1781–1785. [Google Scholar] [CrossRef]
- Benyazid, Y.; Nouri, A.S. Guaranteed Cost Sliding Mode Control For Discrete Uncertain T-S Fuzzy Systems With Time Delays. In Proceedings of the 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021; pp. 1127–1135. [Google Scholar]
- Habbi, H.; Kidouche, M.; Zelmat, M. Data-driven Fuzzy Models for Nonlinear Identification of a Complex Heat Exchanger. Appl. Math. Model. 2011, 35, 1470–1482. [Google Scholar] [CrossRef]
- Gopalakrishnan, A.; Kaisare, N.S.; Narasimhan, S. Incorporating Delayed and Infrequent Measurements in Extended Kalman Filter Based Nonlinear State Estimation. J. Process Control 2011, 21, 119–129. [Google Scholar] [CrossRef]
- Mártona, L.; Szederkényib, G.; Hangos, K.M. Distributed Control of Interconnected Chemical Reaction Networks with Delay. J. Process Control 2018, 71, 52–62. [Google Scholar] [CrossRef]
- Herrera, M.; Camacho, O.; Leiva, H.; Smith, C. An Approach of Dynamic Sliding Mode Control for Chemical Processes. J. Process Control 2020, 85, 112–120. [Google Scholar] [CrossRef]
- Baspinar, C. Disturbance Observers for Linear Closed Loop Systems. In Proceedings of the 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021; pp. 359–364. [Google Scholar]
- Shen, P.; Li, H.-X. A Multiple Periodic Disturbance Rejection Control for Process with Long Dead-time. J. Process Control 2014, 24, 1394–1401. [Google Scholar] [CrossRef]
- Pawlowski, A.; Rodríguez, C.; Guzmán, J.L.; Berenguel, M.; Dormido, S. Measurable Disturbances Compensation: Analysis and Tuning of Feedforward Techniques for Dead-Time Processes. Processes 2016, 4, 12. [Google Scholar] [CrossRef]
- Alsogkier, I.; Bohn, C. Rejection and Compensation of Periodic Disturbance in Control Systems. Int. J. Eng. Innov. Technol. (IJEIT) 2017, 4, 44–54. [Google Scholar]
- Kaneko, S.; Kanagawa, E. Indirect Periodic Disturbance Compensator using Feedforward Control for Image Noises. Soc. Imaging Sci. Technol. 2017, 143–146. [Google Scholar] [CrossRef]
- Dong, Y.; Hao, J.; Si, Y. Finite-Time Bounded Observer-Based Control for Quasi-One-Sided Lipschitz Nonlinear Systems with Time-varying Delay. J. Control Eng. Appl. Inform. 2021, 23, 3–12. [Google Scholar]
- Yang, Y.; Lin, C.; Chen, B. Nonlinear H∞ Observer Design for One-Sided Lipschitz Discrete-Time Singular Systems with Time-varying Delay. Int. J. Robust Nonlinear Control 2019, 29, 252–267. [Google Scholar] [CrossRef]
- Gasmia, N.; Boutayeba, M.; Thabetb, A.; Aoun, M. Observer-Based Stabilization of Nonlinear Discrete-Time Systems using Sliding Window of Delayed Measurements. In Stability, Control and Application of Time-Delay Systems; Butterworth-Heinemann: Oxford, UK, 2019; pp. 367–386. [Google Scholar]
- Ahmed, S.; Huang, B.; Shah, S.L. Parameter and Delay Estimation of Continuous-time Models Using a Linear Filter. J. Process Control 2006, 16, 323–331. [Google Scholar] [CrossRef]
- Xingjian, F.; Xinyao, G. Fault Estimation and Robust Fault-tolerant Control for Singular Markov Switching Systems with Mixed Time-Delays and UAV Applications. J. Control Eng. Appl. Inform. 2021, 23, 53–66. [Google Scholar]
- Choo, Y. An Elementary Proof of the Jury Test for Real Polynomials. Automatica 2011, 47, 249–252. [Google Scholar] [CrossRef]
- Zhu, Y.; Kritic, M.; Su, H. PDE Output Feedback Control of LTI Systems with Uncertain Multi-Input Delays, Plant Parameters and ODE State. Syst. Control Lett. 2019, 123, 1–7. [Google Scholar] [CrossRef]
- Garcia, P.; Albertos, P. Dead-time-compensator for Unstable MIMO Systems with Multiple Time Delays. J. Process Control 2010, 20, 877–884. [Google Scholar] [CrossRef]
- Jevtovica, B.T.; Matausek, M. R PID Controller Design of TITO System Based on Ideal Decoupler. J. Process Control 2010, 20, 869–876. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, C.; Zheng, B. Analysis of Bifurcation in a System of n Coupled Oscillators with Delays. Appl. Math. Model. 2011, 35, 903–914. [Google Scholar] [CrossRef]
- Zheng, M.; Yang, S.; Li, L. F Stabilisation of Dynamic Positioning Ships Based on Sampled-data Control. J. Control Eng. Appl. Inform. 2021, 23, 22–31. [Google Scholar]
- Stojic, D. Modified Single-Phase Adaptive Transfer Delay Based Phase-Locked Loop with DC Offset Compensation. J. Control Eng. Appl. Inform. 2021, 23, 23–31. [Google Scholar]
- Li, B.; Rui, X.; Tian, W.; Cui, G. Neural-Network-Predictor-Based Control for an Uncertain Multiple Launch Rocket System with Actuator Delay. Mech. Syst. Signal Process. 2020, 141, 106489. [Google Scholar] [CrossRef]
- Wu, W.; Luo, J.-J. Nonlinear Feedback Control of a Preheater-Integrated Molten Carbonate Fuel Cell System. J. Process Control 2010, 20, 860–868. [Google Scholar] [CrossRef]
- Amer, Y.A.; EL-Sayed, A.T. On Controlling the Nonlinear Vibrations of a Rectangular Thin Plate with Time Delay Feedback. J. Control Eng. Appl. Inform. 2021, 23, 40–52. [Google Scholar]
- Mazenc, F.; Malisoff, M. Stabilization of a Chemostat Model with Haldane Growth Functions and a Delay in the Measurements. Automatica 2010, 46, 1428–1436. [Google Scholar] [CrossRef]
- Reis, T.; Willems, J.C.; Wong, W.S. A Balancing Approach to the Realization of Systems with Internal Passivity and Reciprocity. Syst. Control Lett. 2019, 60, 69–74. [Google Scholar] [CrossRef]
- Tufa, L.D.; Ramasamy, M.; Shuhaimi, M. Improved Method for Development of Parsimonious Orthonormal Basis Filter Models. J. Process Control 2011, 21, 35–45. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, D. H∞ Fault Detection for Networked Control Systems with Random Delay via Delta Operator. In Proceedings of the 11th Asian Control Conference (ASCC), Gold Coast, Australia, 17–20 December 2017; pp. 1807–1812. [Google Scholar]
- Polyakov, A.; Poznyak, A.; Richard, J. Robust Output Stabilization of Time-Varying Input Delay Systems Using Attractive Ellipsoid Method. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 934–939. [Google Scholar]
- Prodic, A.; Maksimovic, D. Design of a Digital PID Regulator Based on Look-Up Tables for Control of High-Frequency DC-DC Converters. In Proceedings of the IEEE Workshop on Computers in Power Electronics, Mayaguez, PR, USA, 3–4 June 2002; pp. 18–22. [Google Scholar]
- Khalil, A.; Elkawafi, S.; Elgaiyar, A.I.; Wang, J. Delay-Dependent Stability of DC Microgrid with Time-Varying Delay. In Proceedings of the 22nd International Conference on Automation and Computing (ICAC), Colchester, UK, 7–8 September 2016; pp. 360–365. [Google Scholar]
- Elkawafi, S.; Khalil, A.; Elgaiyar, A.I.; Wang, J. Delay-Dependent Stability of LFC in Microgrid with Varying Time Delays. In Proceedings of the 22nd International Conference on Automation and Computing (ICAC), Colchester, UK, 7–8 September 2016; pp. 354–359. [Google Scholar]
- Rasvan, V.; Danciu, D.; Popescu, D. Time Delay and Wave Propagation in Controlling Systems of Conservation Laws. In Proceedings of the 21st International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19–21 October 2017; pp. 419–423. [Google Scholar]
- Baleanu, D.; Ranjbar, A.; Sadatir, S.J.; Delavari, H.; Abdeljawad, T.; Gejji, V. Lyapunov-Krasovksi Stability Theorem for Fractional Systems with Delay. Rom. J. Phys. 2011, 56, 636–643. [Google Scholar]
- Wu, M.; He, Y.; She, J.-H. Stability Analysis and Robust Control of Time-Delay Systems; Science Press: Beijing, China, 2010; pp. 41–330. [Google Scholar]
- Abdollah, A.; Mehdi, F. Stabilizing controller design for nonlinear fractional order systems with time varying delays. J. Syst. Eng. Electron. 2021, 32, 681–689. [Google Scholar] [CrossRef]
- Shen, T.; Petersen, I.R. An Ultimate State Bound for a Class of Linear Systems with Delay. Automatica 2018, 87, 447–449. [Google Scholar] [CrossRef]
- Gyurkovics, E.; Takács, T. Comparison of Some Bounding Inequalities Applied in Stability Analysis of Time-Delay Systems. Syst. Control Lett. 2019, 123, 40–46. [Google Scholar] [CrossRef]
- Ko, K.S.; Lee, W.I.; Park, P.; Sung, D.K. Delays-Dependent Region Partitioning Approach for Stability Criterion of Linear Systems with Multiple Time-varying Delays. Automatica 2018, 87, 389–394. [Google Scholar] [CrossRef]
- Wu, H. Adaptive stabilizing state feedback controllers of uncertain dynamical systems with multiple time delays. IEEE Trans. Autom. Control 2000, 45, 1697–1701. [Google Scholar] [CrossRef]
- Liang, Z.; Liu, Q. Design of Stabilizing Controllers of Upper Triangular Nonlinear Time-Delay Systems. Syst. Control Lett. 2015, 75, 1–7. [Google Scholar] [CrossRef]
- Kamalapurkar, R.; Fischer, N.; Obuz, S.; Dixon, W.E. Time-varying Input and State Delay Compensation for Uncertain Nonlinear Systems. IEEE Trans. Autom. Control 2016, 61, 834–839. [Google Scholar] [CrossRef]
- Shen, T.; Wang, X.; Yuan, Z. Stability Analysis for a Class of Digital Filters with Single Saturation Nonlinearity. Automatica 2010, 46, 2112–2115. [Google Scholar] [CrossRef]
- Kleptsyna, M.L.; Le Breton, A.; Viot, M. Risk Sensitive and LEG Filtering Problems are Not Equivalent. Syst. Control Lett. 2010, 59, 484–490. [Google Scholar] [CrossRef]
- Gao, H.; Meng, X.; Chen, T. A Parameter-Dependent Approach to Robust H∞ Filtering for Time-Delay Systems. IEEE Trans. Autom. Control 2008, 53, 2420–2425. [Google Scholar] [CrossRef]
- Lu, L.; Albertos, P.; García, P. Stability Analysis of Linear Systems with Time-varying State and Measurement Delays. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 4692–4697. [Google Scholar]
- Al-Mohy, A.H.; Higham, N.J. A New Scaling and Squaring Algorithm for the Matrix Exponential. SIAM J. Matrix Anal. Appl. 2009, 31, 970–989. [Google Scholar] [CrossRef]
- Matlab/Simulink User Guide. Available online: https://www.mathworks.com/help/pdf_doc/simulink/sl_using.pdf (accessed on 11 January 2021).
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms, 2nd ed.; Luniver Press: Beckington, UK, 2010. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nicola, M. The Stability of Systems with Command Saturation, Command Delay, and State Delay. Automation 2022, 3, 47-83. https://doi.org/10.3390/automation3010003
Nicola M. The Stability of Systems with Command Saturation, Command Delay, and State Delay. Automation. 2022; 3(1):47-83. https://doi.org/10.3390/automation3010003
Chicago/Turabian StyleNicola, Marcel. 2022. "The Stability of Systems with Command Saturation, Command Delay, and State Delay" Automation 3, no. 1: 47-83. https://doi.org/10.3390/automation3010003
APA StyleNicola, M. (2022). The Stability of Systems with Command Saturation, Command Delay, and State Delay. Automation, 3(1), 47-83. https://doi.org/10.3390/automation3010003