1. Introduction
Maritime Autonomous Surface Ships (MASSs) are defined as ships that can operate independently of interaction with humans to a certain degree. According to the International Maritime Organisation (IMO) [
1], the international shipping’s global regulatory body, such degrees of autonomy are defined as follows:
Degree 1: Ship with automated processes and decision support. The seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated and at times be unsupervised, but with seafarers on board ready to take control;
Degree 2: Remotely controlled ship with seafarers on board. The ship is controlled and operated from another location. Seafarers are available on board to take control and operate the shipboard systems if needed;
Degree 3: Remotely controlled ship without seafarers on board. The ship is controlled and operated from another location. There are no seafarers on board;
Degree 4: Fully autonomous ship. The ship’s operating system can make decisions and determine actions by itself without human intervention.
Depending on the degree of autonomy, autonomous ships can offer considerable benefits in terms of safety, efficiency, and improved operation. However, as a novel presence in the global maritime industry (Degree 3 and Degree 4 are not expected until the 2030s and 2040s), they face significant cybersecurity issues. Addressing potential vulnerabilities to cyberattacks and ensuring that robust cybersecurity measures are in place is important to prevent any unauthorised access or manipulation of the ship’s systems.
The cyberattack surface of autonomous vessels is closely related to the level of autonomy, since the attack surface may vary with the complexity of the number of systems to control and monitor the vessels. Although the cyberattack surface is not well-defined yet, it might consist of attacks aiming at intercepting and manipulating communications or on-board IoT devices, attacks on Information and Communication Technology (ICT) systems (on-board or remote), attacks on AI/ML-based systems used for autonomous operations, or even physical attacks aiming at taking control of the uncrewed vessel.
In this paper, we address the security of the digital infrastructure used for enabling autonomous shipping functionalities by considering all the components of this kind of system, that is the ship, the Remote Operations Centre (ROC), and the communication channel between the first two elements. In this perspective, we addressed the security of the system by focusing on two aspects. On one side, we proposed an approach to secure the communication channel between the Shore Control Centre and the vessel, relying on IEC 63173-2 Secure Exchange and COMmunication (SECOM) standard [
2] by implementing cryptography techniques, including a Public Key Infrastructure (PKI) and key exchange mechanisms. For autonomous vessels more than conventionally manned ships, efficient and secure ship-to-shore communication is a key aspect for safe operations. The SECOM protocol ensures end-to-end data integrity, data confidentiality, and authentication processes. On the other side, we secured the digital infrastructure on the shore, deployed in the Livorno seaport, which is responsible for hosting and running the SCC applications and data collection, storage, and processing. Therefore, a combination of the Deep Autoencoder and Hierarchical Density-Based Spatial Clustering (HD-DNCAE [
3]) ML-based algorithms was developed to provide the digital infrastructure with both anomalies and system intrusion detection capabilities, conforming with the zero-touch approach. The ICT Prototyping Framework [
4] was adopted and used as a reference architecture and framework for the development and deployment of the components of the autonomous shipping application used for the experimental validation of the proposed approach.
The first challenge was to implement the SECOM standard to secure the communication channel by adopting a microservice architecture. The use of an ICT framework with a layered structure made possible this approach, which is a novelty in the maritime landscape. Employing a microservice architecture enables the possibility to address the scalability and fault-tolerance aspects, which are crucial in the autonomous shipping context. Furthermore, it has been challenging to develop an anomaly and intrusion detection ML-based algorithm that takes into account misbehaviour coming from the on-shore infrastructure (e.g., anomalous readings from a sensor deployed in the port area or an intrusion on the land-side infrastructure). It is normal to think that systems on board the ship are not designed with cybersecurity as a consideration because of their “air-gapped by default” status [
5] and so they are more exposed to cyberattacks, but in the autonomous shipping landscape it is also fundamental to consider the cyber-resilience to attacks for the land-side infrastructure that may be devoted to the remote monitoring and control of the ship during the manoeuvres. In addition, the proposed model is very flexible, as it does not require defining the number of clusters in advance but can learn how to classify data on its own. Therefore, the contribution and novelty of this paper can be summarized in two main points:
The implementation of the SECOM standard using a microservice-based approach allowed us to ensure end-to-end data integrity, confidentiality (data encryption), non-repudiation (employing private keys), and authentication mechanisms (for data and services through JSON Web Tokens—JWT) by establishing a secure communication channel between the ship and the SCC to mitigate traditional cybersecurity vulnerabilities of the maritime communication systems (e.g., man-in-the-middle and distributed denial-of-service);
The implementation of the HD-DNCAE deep learning algorithm on top of the ICT infrastructure of the Livorno seaport allowed us to detect known and novel cyberattacks on the existing digital infrastructure without predefining the number of clusters and to provide an optimal Area Under the Curve (AUC) score leading to a better clustering of data.
The rest of this paper is organised as follows:
Section 2 addresses relevant related works;
Section 3 describes the reference architecture used for the application development as well as the application itself;
Section 4 is focused on the SECOM standard by describing how it was applied to the considered scenario;
Section 5 describes ML algorithms and how they were applied to detect anomalies and intrusions within the underlying digital infrastructure; in
Section 6 experimental setup and performance evaluation are described; finally,
Section 7 presents a discussion of the main findings of the paper and future works.
2. Related Works
Anomaly detection within the maritime domain has been researched through the use of Automatic Identification System (AIS) data, trajectory analysis, cloud-based frameworks, and ML-based techniques to enhance the level of security and situational awareness in the maritime environment.
Wolsing et al. (2022) [
6] made note that the methods for detecting anomalies in the AIS tracks are course deviation and unexpected port arrivals as features for showing suspicious operations and keeping the maritime domain safe. Recently, Nguyen et al. (2024) [
3] proposed an approach for network intrusion detection using deep autoencoders in a Deep Nested Clustering Autoencoder (DNCAE) model to enhance anomaly detection through the learning of a better representation of normal network data in latent space and creating tighter regions of clusters using the K-means clustering technique. Al-Khazraji et al. (2022) [
7] proposed a solution to estimate the Remaining Useful Life for aircraft engines adopting an autoencoder-based Deep Belief Network model.
Kim et al. (2021) [
8] conducted research for the detection of sensor data anomalies from maritime engines. They used ensemble learning techniques to combine various machine learning models to increase the overall accuracy and robustness of the developed anomaly detection system, especially in accurately identifying network intrusion among IT systems used in the maritime industry. Farahnakian et al. (2023) [
9] demonstrated that the K-means clustering method was able to effectively detect ships or those sets of vessels that turn off the AIS transceivers to perform illegal activities.
Other studies focused on the trajectories’ analysis instead of focusing on the AIS data to discover anomalous behaviours and intrusions. Hu et al. (2023) [
10] developed a Transfer Learning-based Trajectory Anomaly Detection strategy for IoT-empowered Maritime Transportation Systems to explore the spatial similarity between normal trajectories and train the trajectory anomaly detection model. Anneken et al. (2020) [
11] proposed a novel approach to model the uncertainty of the vessels’ movements while following a route by adopting clustering techniques based on the estimation of the probability of a deviation from the given trajectory.
On the other side, cybersecurity threats affecting the communication channel between the ship and the shore, as well as the ones affecting the land information system, must be considered. Nganga et al. (2023) [
5] researched to better understand both enabling factors and challenges impacting the effectiveness of Maritime Security Operation Centres (M-SOC), which are the ancestors of the Remote Operations Centres. Ashraf et al. (2022) [
12] and Tabish et al. (2024) [
13] conducted studies to identify the cyberthreats affecting the maritime domain in its entirety and discuss risk assessment methods and possible recommendations and countermeasures. Balduzzi and Pasta (2014) [
14] conducted a security evaluation of the AIS implementations and communication protocols specifications by identifying a set of threats related to both the software and the hardware equipment such as ship spoofing, hijacking, or availability disruption (e.g., frequency hopping, timing attacks, or slot starvation). Zhang et al. (2023) [
15] proposed a blockchain-based architecture with a reputation voting mechanism for making the consensus process able to improve anti-attack capabilities. The proposed mutual authentication scheme was validated through simulation studies, which phase out the performance benefits in terms of data integrity and confidentiality. Furthermore, Chung et al. (2018) [
16] proposed a route plan exchange scheme based on a blockchain, pointing out the need for a distributed PKI for the port community actors to guarantee a secure information exchange mechanism.
These studies demonstrate the need for appropriate security measures for protecting and securing both the autonomous ships and the land digital infrastructures they rely on for data exchange, as well as the communication channel between them.
4. The SECOM Standard
The increase in reliance on digital systems in the maritime domain has paved the way for a wide range of cyberattacks. These cyberattacks can lead to compromised operational security, potential disruptions to business operations, and data breaches. One key aspect in mitigating these concerns is the adoption of standardised procedures and protocols for secure data transmission and communication, such as the SECOM standard [
2]. IEC 63173-2 SECOM is an international standard defining a secure communication protocol between a ship and an SCC, which provides capabilities for secure data exchange with technical services that are defined by IALA [
22] and partly included in the IHO S-100 standard [
23]. The standard includes information service interfaces (APIs) for the data exchange, and information security measures using a Public Key Infrastructure (PKI), covering communication channel security and data protection aspects. The exchange of messages between the ship and the SCC relies on IP-based web services.
The SECOM components provide measures to meet the security requirements of the applications such as data authentication and integrity, service authentication and mutual TLS, data confidentiality and secure communication channels, access control, and identification through a common registry for unique identities.
Due to the complexity of maritime networks, in addition to a secure communication protocol capability between the ship and SCC, there is a need for a framework that can properly address scalability as well as fault-tolerance-related aspects. Hence, the SECOM standard is implemented relying on a microservice architecture (namely MSA-based SECOM). The MSA-based SECOM is deployed on the SCC, and it comprises different microservices, as shown in
Figure 3. Some are employed for non-functional requirements, such as the API Gateway, the discovery server, the authentication and authorisation server, the distributed tracing mechanism, and the message broker. Then, there is a suite of microservices that are required to implement the SECOM functionalities, such as the symmetric encryption and symmetric decryption, the asymmetric encryption and signature, the asymmetric decryption and signature verification, the key generator, and WebSocket. The main purpose of the SECOM standard is to enable the exchange of information that is consistent with the S-100 data model from the ship to the SCC and vice versa in such a way that the security requirements are fulfilled.
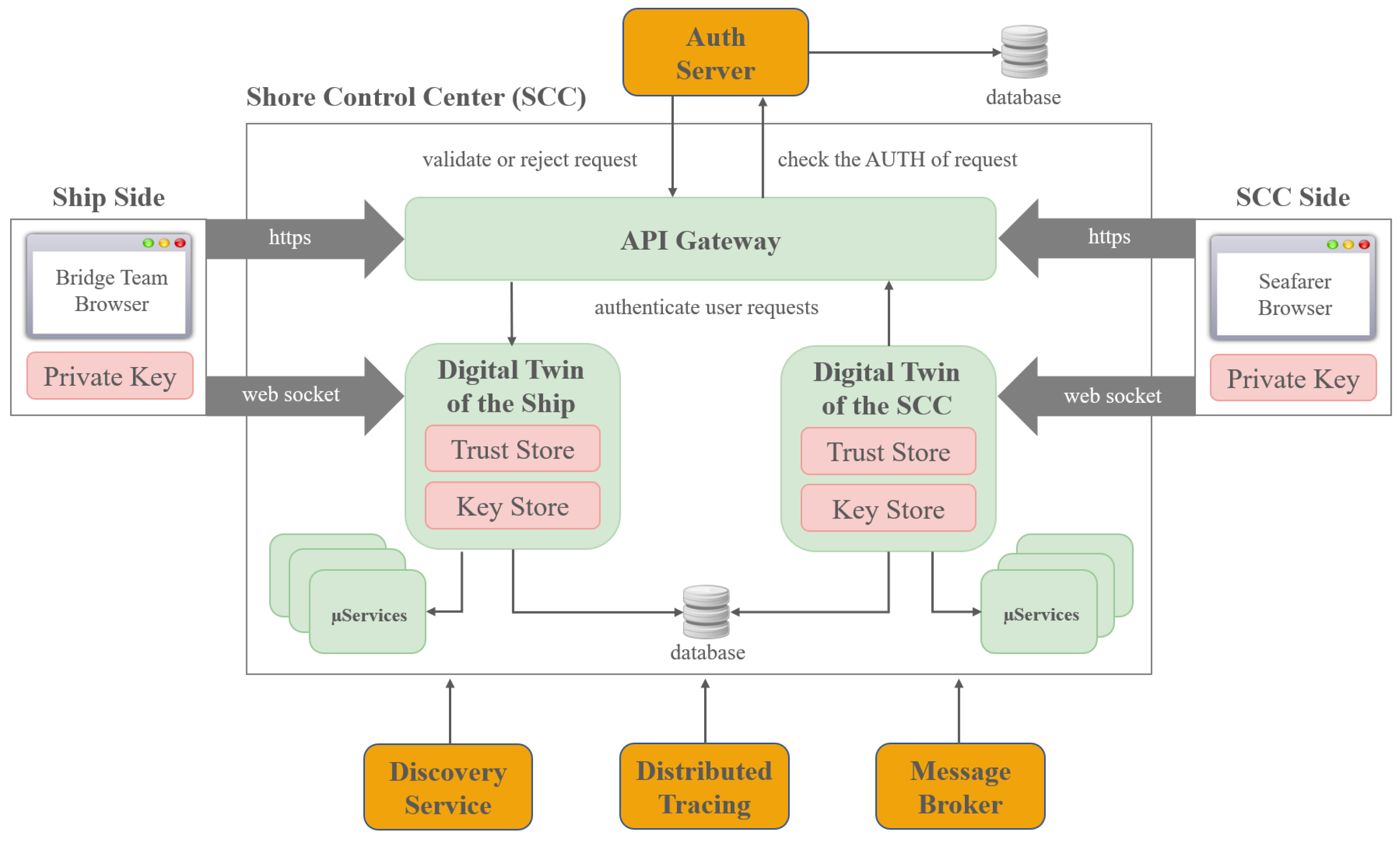
As shown in
Figure 4, the SECOM system architecture has three main blocks: the ship side, the MSA-based SECOM suite, and the SCC side. On the ship side, users are connected through a browser and can exploit the functionalities provided by the ship-side microservices. They are provided with a digital certificate and a private key to encrypt messages to be sent to the shore. The SCC operator also has his own certificate and a private key and can send encrypted messages to the ship side.
To achieve the capability of exchanging messages, the ship sends an HTTP request to the API Gateway acting as a proxy. The gateway in turn redirects the request to the authentication server that has to authorise it. If the request is approved, it is redirected to the microservice that allows the ship to establish a WebSocket connection and make a digital copy of all the services on its side. At this point, the microservice starts to interact with the other microservices to finally provide the user with a shared key, enabling end-to-end encryption between the two entities. Having the shared key, the ship sends an encrypted and authenticated message to the SCC. Assuming the SCC has undergone the authentication step and has established a WebSocket connection, the SCC can receive the messages, verify that they arrived from the ship, and decrypt them using the shared key.
7. Conclusions and Future Work
In this paper, we addressed the security challenges related to the maritime domain by implementing the SECOM standard for securing the communication channel between the ship and the Shore Control Centre and by testing the machine learning algorithms for anomaly detection on the ICT reference stack of the Port of Livorno.
The proposed implementation of the SECOM standard uses a secure and scalable microservice architecture and provides data and service authentication, confidentiality, integrity, identification, and non-repudiation. Confidentiality was achieved as the shared key was only known to the parties involved in the encryption step (ship and SCC). This property is guaranteed since each public key is signed by the sender and encrypted with the receiver’s certificate. Hence, it will be difficult for the parties not involved in the communication to intercept the shared key, unless they have the private key of both sides. In addition, messages cannot be repudiated, as we can verify that the message encrypted and sent over the channel came from the entity that holds the same shared key as the receiver. Data integrity and authentication were also guaranteed as the message is encrypted using AES with GCM mode and so has a tag attached to it that can be generated only by the key pair holders. On top of this, the implementation of a mutual authentication procedure for the authentication among the microservices provides service authentication property. Moreover, the scalability and robustness of our system addresses security challenges faced in the communication relying on the IHO S-100 [
23] compliant messages. Scalability and robustness enable improved fault tolerance and better performance and efficiency for services in case of high traffic loads and multiple requests. Finally, the identification was achieved as each service consumer needs to be authenticated with the pre-registered credentials using only valid access and JWT tokens. Hence, the implementation of the SECOM standard based on a microservice architecture addresses the security challenges existing in the maritime sector and traditional monolithic applications. On one side, our implementation provides a mutual authentication procedure to guarantee service authentication among microservices. On the other side, it provides the capability to generate and share keys among the parties (e.g., ship and the SCC) so that the information travelling through untrusted public networks can be exchanged securely.
The future direction of the proposed implementation of the SECOM standard involves orchestrating microservices using advanced tools like Kubernetes. This approach aims to improve system resilience, fault tolerance, and scalability, especially under heavy network traffic or system failure conditions. Additionally, integrating a centralised log-tracing system and automated configuration management is recommended. These enhancements will streamline monitoring, facilitate quicker troubleshooting, and simplify environment variable management, making the system more reliable and easier to maintain.
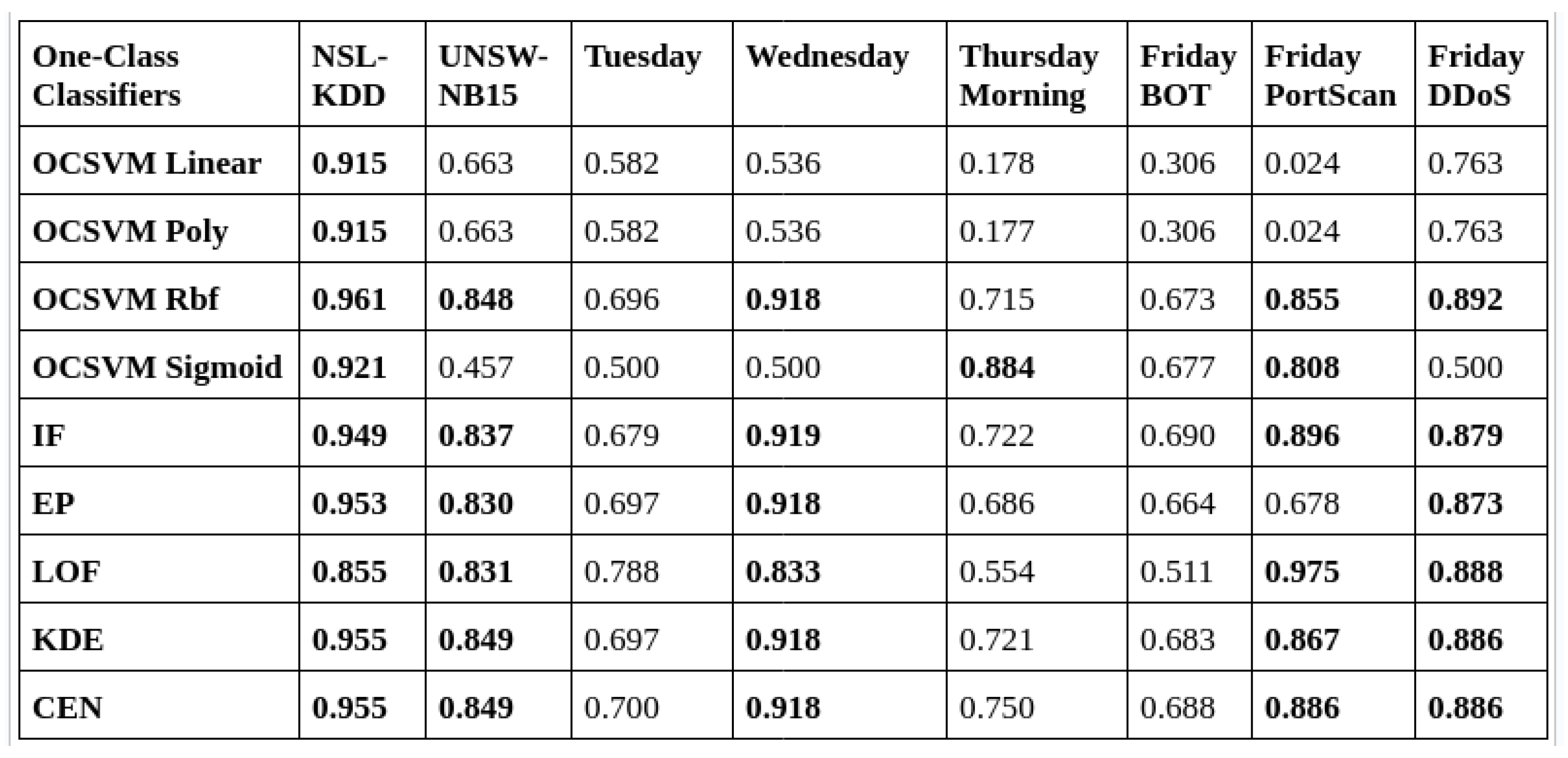
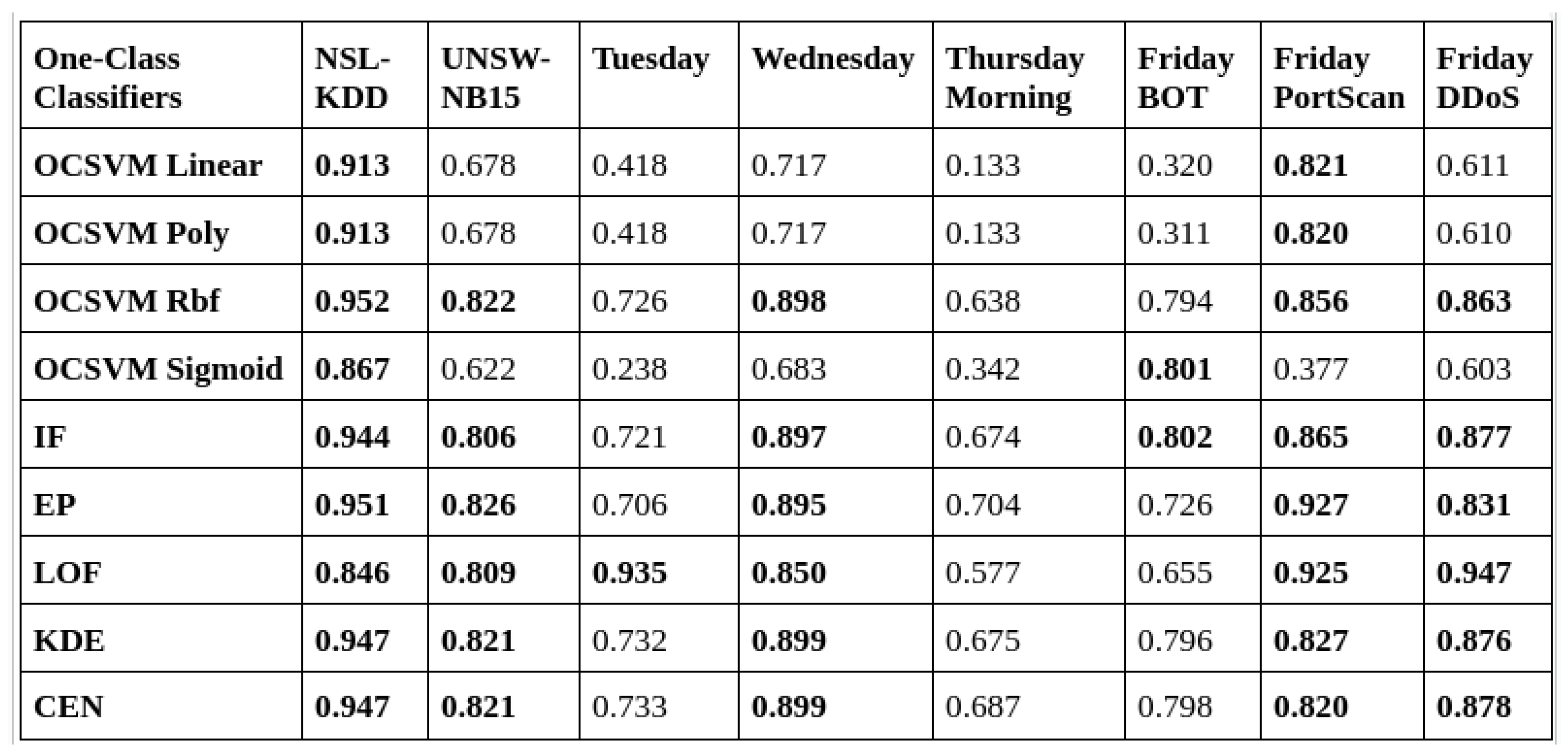
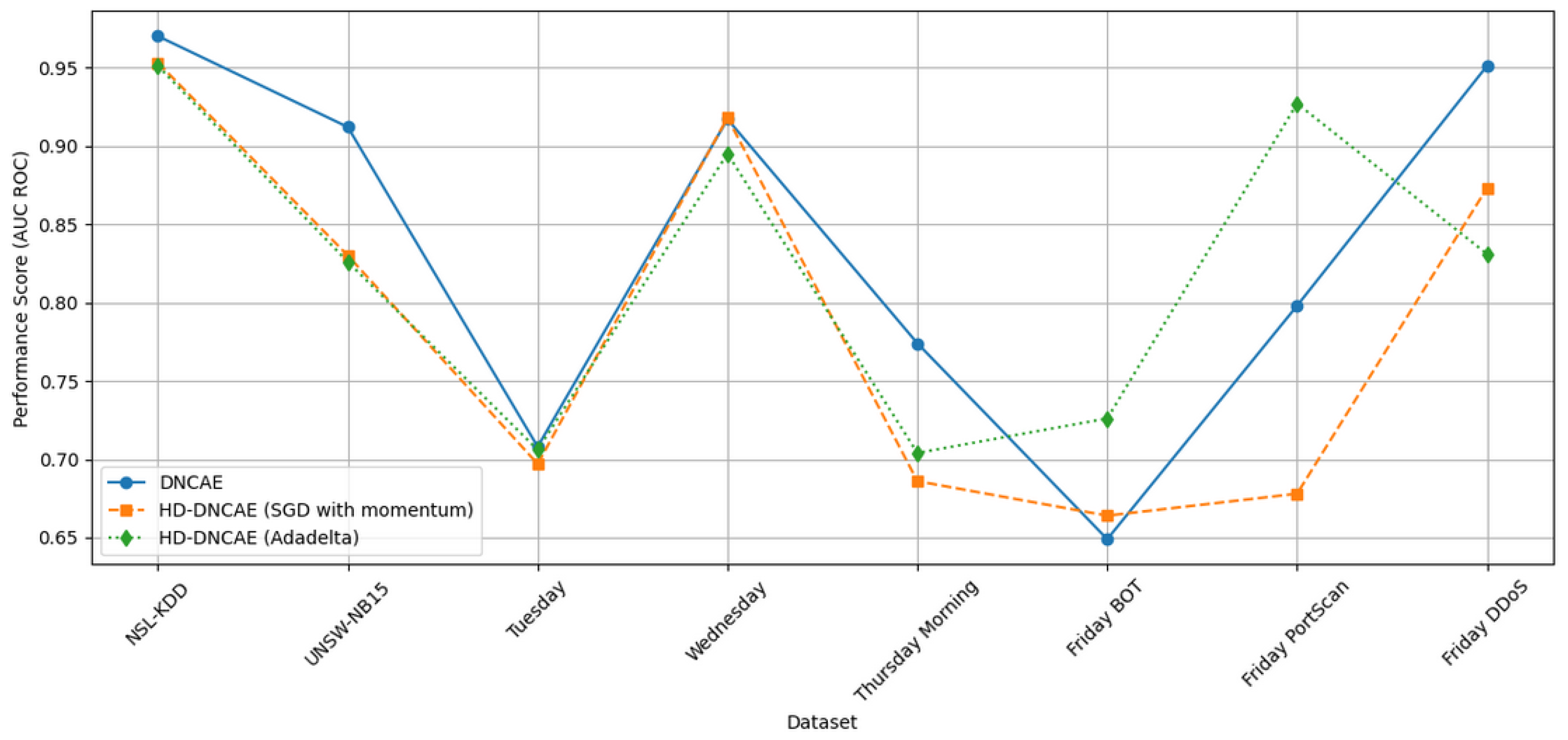
Furthermore, this paper introduced HD-DNCAE, an enhancement to the DNCAE model, implemented with SGD momentum and Adadelta optimisers. We repeated the experiments across multiple datasets to demonstrate HD-DNCAE’s performance in anomaly detection tasks. On the NSL-KDD dataset [
40], HD-DNCAE (SGD momentum) with KDE and CEN classifiers achieved an AUC of 0.955, as with DNCAE’s performance. For the UNSW-NB15 dataset [
41], HD-DNCAE (SGD momentum) with LOF reached 0.831 AUC, outperforming DNCAE’s 0.542. Moreover, HD-DNCAE showed improvements in several CIC-IDS [
42] scenarios:
Tuesday: HD-DNCAE (Adadelta) with LOF achieved an AUC of 0.935 against 0.476 with DNCAE.
Wednesday: HD-DNCAE (Adadelta) with OCSVM (linear and poly) maintained an AUC of 0.717, while DNCAE obtained 0.398.
Thursday Morning: HD-DNCAE (SGD momentum) with OCSVM Sigmoid attained an AUC of 0.884, matching DNCAE’s performance.
Friday BOT: HD-DNCAE (Adadelta) with IF reached AUC of 0.802 against 0.712 DNCAE.
Friday PortScan: HD-DNCAE (SGD momentum) with LOF outperformed with an AUC of 0.975 against DNCAE with 0.467.
Friday DDoS: HD-DNCAE (Adadelta) with LOF achieved an AUC of 0.947 outperforming DNCAE of 0.461.
These results demonstrate HD-DNCAE’s capability in detecting diverse anomalies, with notable improvements in specific scenarios, particularly when using the Adadelta optimiser. The performance across multiple datasets and classifiers establishes HD-DNCAE as a viable alternative in anomaly detection for cybersecurity applications, offering comparable or improved results in most cases.
In the future, rigorous testing of both DNCAE and HD-DNCAE is expected to be conducted by simulating real-world attacks on the ICT stack of the seaport of Livorno. This activity will help us to determine how robust these algorithms are to never-before-seen attack scenarios, and, by undergoing this, we will be able to update the collected network dataset from the ICT stack to include not only normal data but other categories of attack.
Author Contributions
Conceptualization, M.T., A.T. and P.P.; methodology, A.T., M.T., M.H. and K.G.G.; software, M.H., K.G.G. and M.T.; validation, M.H., K.G.G. and M.T.; formal analysis, A.T., M.T. and P.P.; investigation, M.T., A.T., M.H. and K.G.G.; resources, M.T., M.H. and K.G.G.; data curation, A.T. and M.T.; writing—original draft preparation, M.T., A.T., M.H. and K.G.G.; writing—review and editing, M.T., A.T., M.H., K.G.G. and P.P.; visualization, A.T., M.T., M.H. and K.G.G.; supervision, P.P.; project administration, P.P.; funding acquisition, P.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- MSC.1/Circ. 1638—Outcome of the Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships—Mass. 2021. Available online: https://wwwcdn.imo.org/localresources/en/MediaCentre/HotTopics/PublishingImages/Pages/Autonomous-shipping/MSC.1-Circ.1638%20-%20Outcome%20Of%20The%20Regulatory%20Scoping%20ExerciseFor%20The%20Use%20Of%20Maritime%20Autonomous%20Surface%20Ships...%20(Secretariat).pdf (accessed on 20 June 2024).
- IEC 63173-2:2022: Maritime Navigation and Radiocommunication Equipment and Systems—Data Interfaces—Part 2: Secure Communication between Ship and Shore (SECOM). Available online: https://webstore.iec.ch/en/publication/64543 (accessed on 20 June 2024).
- Nguyen, V.Q.; Ngo, T.L.; Nguyen, L.M.; Nguyen, V.H.; Shone, N. Deep Nested Clustering Auto-Encoder for Anomaly-Based Network Intrusion Detection. In Proceedings of the 2023 RIVF International Conference on Computing and Communication Technologies (RIVF), Hanoi, Vietnam, 23–25 December 2023; pp. 289–294. [Google Scholar] [CrossRef]
- Barasti, D.; Troscia, M.; Lattuca, D.; Tardo, A.; Barsanti, I.; Pagano, P. An ICT Prototyping Framework for the “Port of the Future”. Sensors 2022, 22, 246. [Google Scholar] [CrossRef] [PubMed]
- Nganga, A.; Nganya, G.; Lützhöft, M.; Mallam, S.; Scanlan, J. Bridging the Gap: Enhancing Maritime Vessel Cyber Resilience through Security Operation Centers. Sensors 2023, 24, 146. [Google Scholar] [CrossRef] [PubMed]
- Wolsing, K.; Roepert, L.; Bauer, J.; Wehrle, K. Anomaly Detection in Maritime AIS Tracks: A Review of Recent Approaches. J. Mar. Sci. Eng. 2022, 10, 112. [Google Scholar] [CrossRef]
- Al-Khazraji, H.; Nasser, A.R.; Hasan, A.M.; Al Mhdawi, A.K.; Al-Raweshidy, H.; Humaidi, A.J. Aircraft Engines Remaining Useful Life Prediction Based on A Hybrid Model of Autoencoder and Deep Belief Network. IEEE Access 2022, 10, 82156–82163. [Google Scholar] [CrossRef]
- Kim, D.; Antariksa, G.; Handayani, M.P.; Lee, S.; Lee, J. Explainable Anomaly Detection Framework for Maritime Main Engine Sensor Data. Sensors 2021, 21, 5200. [Google Scholar] [CrossRef] [PubMed]
- Farahnakian, F.; Nicolas, F.; Nevalainen, P.; Sheikh, J.; Heikkonen, J.; Raduly Baka, C. A Comprehensive Study of Clustering-Based Techniques for Detecting Abnormal Vessel Behavior. Remote Sens. 2023, 15, 1477. [Google Scholar] [CrossRef]
- Hu, J.; Kaur, K.; Lin, H.; Wang, X.; Hassan, M.M.; Razzak, I. Intelligent Anomaly Detection of Trajectories for IoT Empowered Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2382–2391. [Google Scholar] [CrossRef]
- Anneken, M.; Jousselme, A.L.; Robert, S.; Beyerer, J. Synthetic Trajectory Extraction for Maritime Anomaly Detection. In Proceedings of the 2018 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 12–14 December 2018; pp. 1048–1053. [Google Scholar] [CrossRef]
- Ashraf, I.; Park, Y.; Hur, S.; Kim, S.W.; Alroobaea, R.; Zikria, Y.B. A Survey on Cyber Security Threats in IoT-Enabled Maritime Industry. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2677–2690. [Google Scholar] [CrossRef]
- Tabish, N.; Chaur-Luh, T. Maritime Autonomous Surface Ships: A Review of Cybersecurity Challenges, Countermeasures, and Future Perspectives. IEEE Access 2024, 12, 17114–17136. [Google Scholar] [CrossRef]
- Balduzzi, M.; Pasta, A.; Wilhoit, K. A security evaluation of AIS automated identification system. In Proceedings of the 30th Annual Computer Security Applications Conference (ACSAC ’14), New Orleans, LA, USA, 8–12 December 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 436–445. Available online: https://documents.trendmicro.com/assets/white_papers/wp-a-security-evaluation-of-ais.pdf (accessed on 20 June 2024).
- Zhang, P.; Wang, Y.; Singh Aujla, G.; Jindal, A.; Al Otaibi, Y. A Blockchain-Based Authentication Scheme and Secure Architecture for IoT-Enabled Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2322–2331. Available online: https://ieeexplore.ieee.org/document/9745459 (accessed on 20 June 2024). [CrossRef]
- Chung, D.; Sook Jeon, H. Route Plan Exchange Scheme Based on Block Chain. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 697–699. Available online: https://ieeexplore.ieee.org/document/8436761 (accessed on 20 June 2024).
- MSC 85/26/Add.1, Annex 20—Strategy for the Development and Implementation of e-Navigation. 2020. Available online: https://wwwcdn.imo.org/localresources/en/OurWork/Safety/Documents/enavigation/MSC%2085%20-%20annex%2020%20-%20Strategy%20for%20the%20development%20and%20implementation%20of%20e-nav.pdf (accessed on 20 June 2024).
- Pagano, P.; Antonelli, S.; Tardo, A. C-Ports: A proposal for a comprehensive standardization and implementation plan of digital services offered by the “Port of the Future”. Comput. Ind. 2022, 134, 103556. [Google Scholar] [CrossRef]
- JLab Website. Available online: https://jlab-ports.cnit.it/ (accessed on 20 June 2024).
- 5G-Assisted Maritime Autonomous Surface Ship—5G MASS. Available online: https://jlab-ports.cnit.it/5g-mass/ (accessed on 20 June 2024).
- The NMEA Standard. Available online: https://www.nmea.org/ (accessed on 20 June 2024).
- IALA. Available online: https://www.iala-aism.org/about-iala/ (accessed on 20 June 2024).
- S-100 Products. Available online: https://iho.int/en/standards-and-specifications (accessed on 20 June 2024).
- HDBSCAN Algorithm in Scikit-Learn. Available online: https://scikit-learn.org/stable/modules/generated/sklearn.cluster.HDBSCAN.html (accessed on 20 June 2024).
- Spring Boot. Available online: https://spring.io/projects/spring-boot (accessed on 20 June 2024).
- Spring Cloud Gateway. Available online: https://spring.io/projects/spring-cloud-gateway (accessed on 20 June 2024).
- Open Source Identity and Access Management—Keycloak. Available online: https://www.keycloak.org/ (accessed on 20 June 2024).
- Service Registration and Discovery—Netflix Eureka Service Registry. Available online: https://spring.io/guides/gs/service-registration-and-discovery (accessed on 20 June 2024).
- Open Source Distributed Event Streaming Platform—Apache Kafka. Available online: https://kafka.apache.org (accessed on 20 June 2024).
- Distributed Tracing System—Zipkin. Available online: https://zipkin.io/ (accessed on 20 June 2024).
- Maven Plugin for Building Container Images—JIB. Available online: https://mvnrepository.com/artifact/com.google.cloud.tools/jib-maven-plugin (accessed on 20 June 2024).
- JAVA Library—Lombok. Available online: https://projectlombok.org/ (accessed on 20 June 2024).
- Cryptography and SSL-TLS Toolkit—OpenSSL. Available online: https://www.openssl.org/ (accessed on 20 June 2024).
- Jupiter Notebook. Available online: https://jupyter.org/ (accessed on 20 June 2024).
- PyTorch. Available online: https://pytorch.org/ (accessed on 20 June 2024).
- NumPy. Available online: https://numpy.org/ (accessed on 20 June 2024).
- Pandas. Available online: https://pandas.pydata.org/ (accessed on 20 June 2024).
- Matplotlib. Available online: https://matplotlib.org/ (accessed on 20 June 2024).
- Seaborn. Available online: https://seaborn.pydata.org/ (accessed on 20 June 2024).
- NSL-KDD Datasets. Available online: https://github.com/Mamcose/NSL-KDD-Network-Intrusion-Detection (accessed on 20 June 2024).
- UNSW-NB15 Datasets. Available online: https://research.unsw.edu.au/projects/unsw-nb15-dataset (accessed on 20 June 2024).
- CIC-IDS2017 Datasets. Available online: https://github.com/mahendradata/cicids2017-ml (accessed on 20 June 2024).
- Mobius OneM2M Standard Platform. Available online: https://github.com/IoTKETI/Mobius (accessed on 20 June 2024).
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}