
Optical Dromions for Spatiotemporal Fractional Nonlinear System in Quantum Mechanics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Definition
- If = , then = for .
- = .
- = = .
2. Painlevé Test (P-Test)
3. Implementation of Painlevé Test (P-Test)
3.1. Dominant Behaviour Calculation
3.2. Calculation for Resonances
3.3. Computation of Integration Constants and Compatibility Condition
4. Auxiliary Equation Mapping (AEM) Technique
5. Implementation of Auxiliary Equation Mapping (AEM)
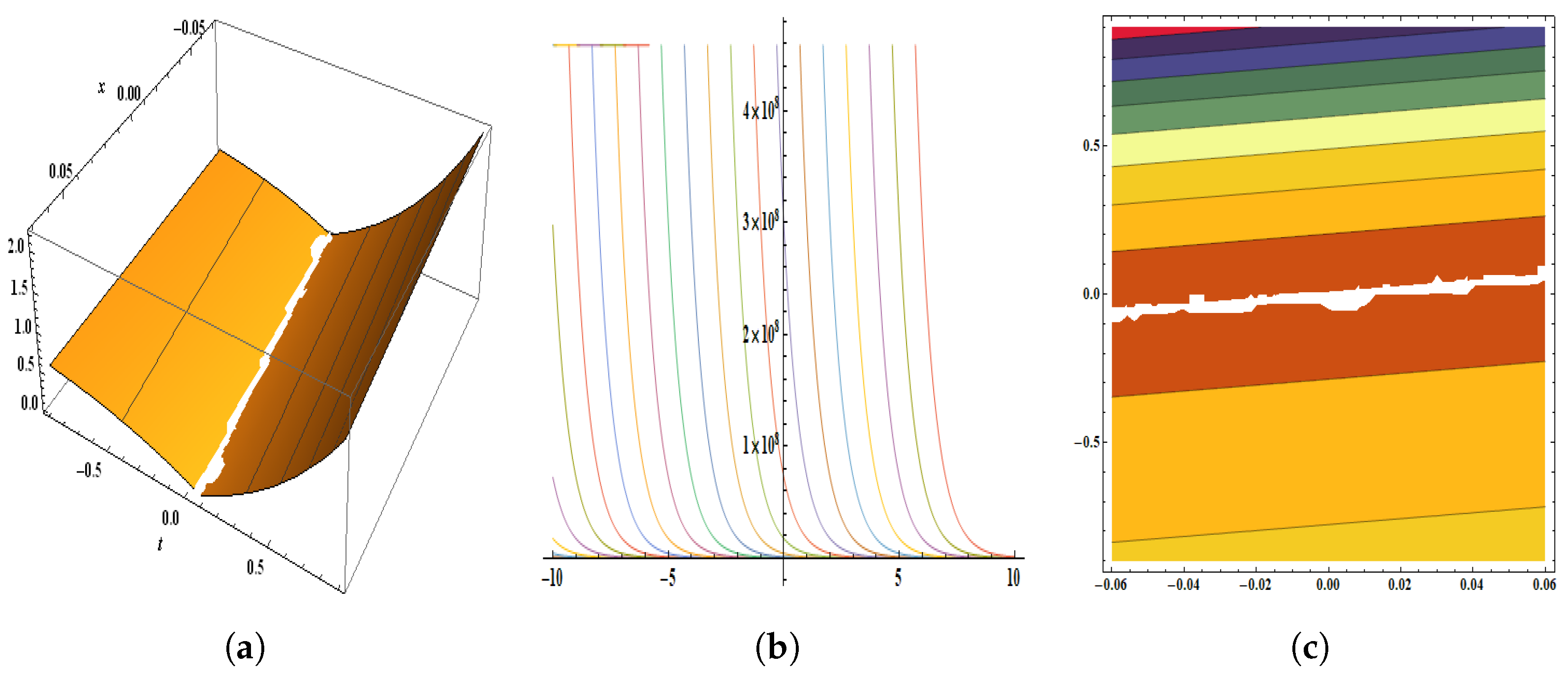
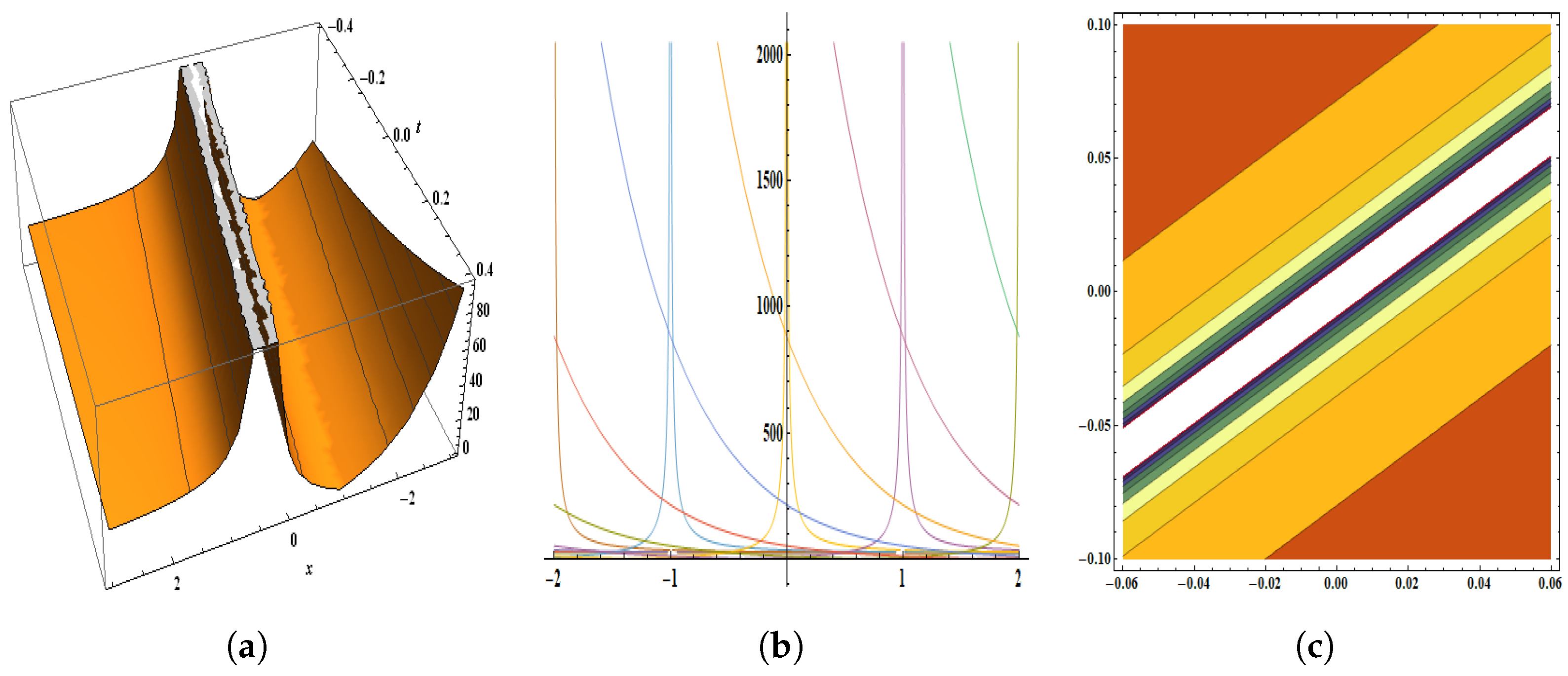
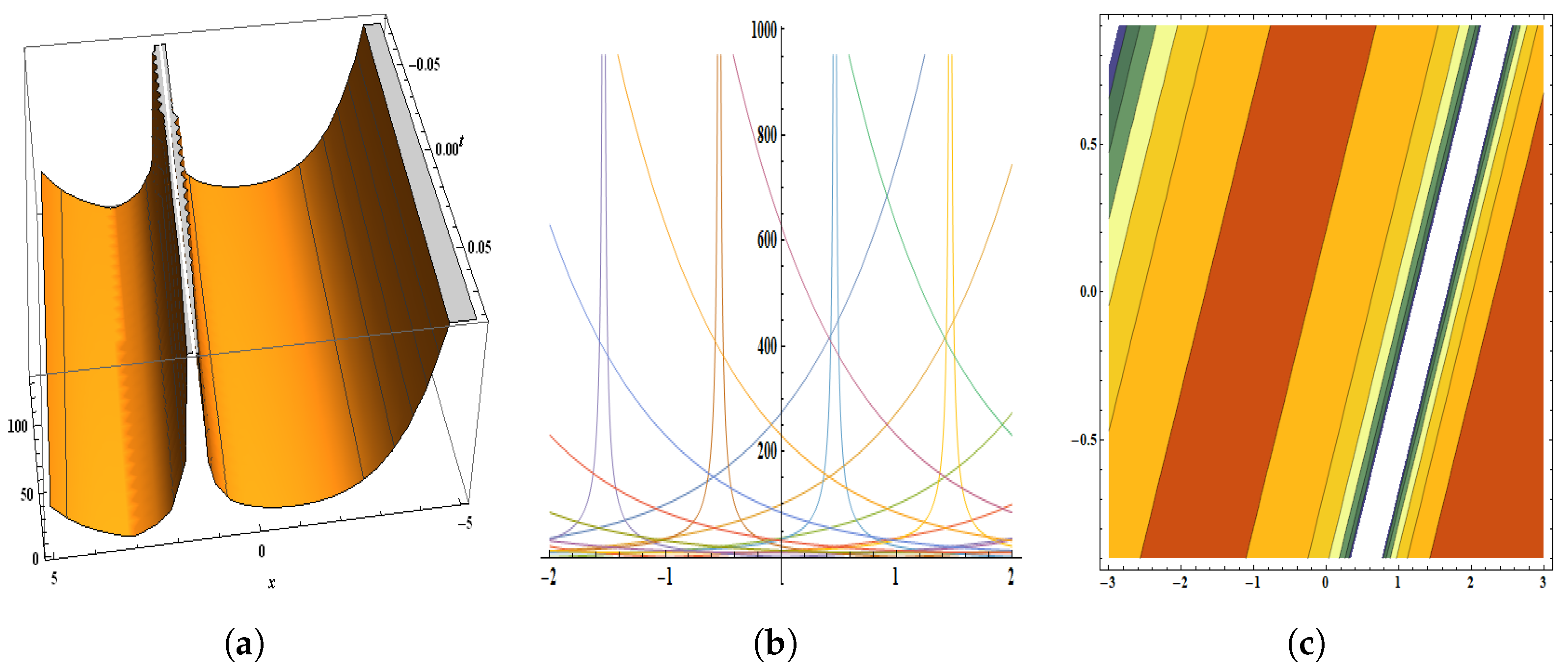
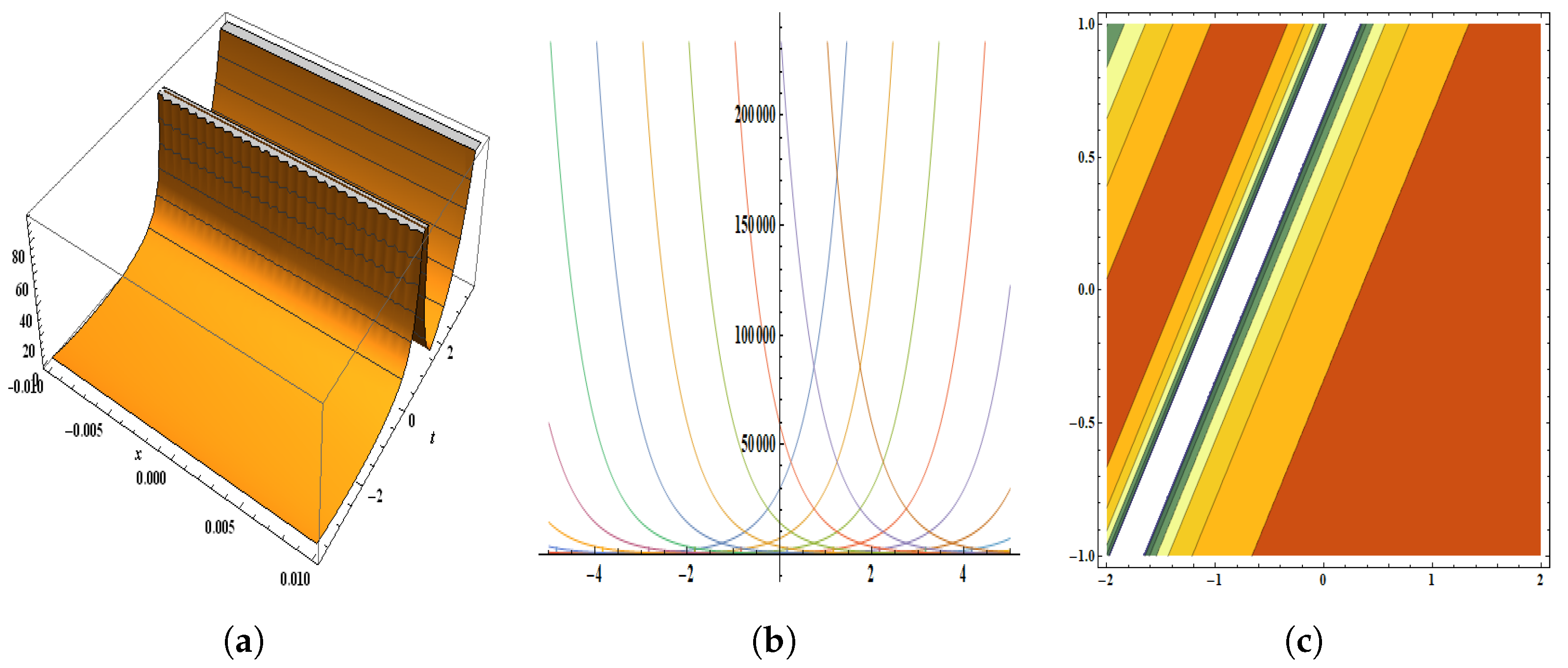
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Kumar, A.; Chauhan, H.V.S.; Ravichandran, C.; Nisar, K.S.; Baleanu, D. Existence of solutions of non-autonomous fractional differential equations with integral impulse condition. Adv. Differ. Equ. 2020, 2020, 434. [Google Scholar] [CrossRef]
- Shaikh, A.S.; Nisar, K.S. Transmission dynamics of fractional order Typhoid fever model using Caputo–Fabrizio operator. Chaos Solitons Fractals 2019, 128, 355–365. [Google Scholar] [CrossRef]
- Valliammal, N.; Ravichandran, C. Results on fractional neutral integro-differential systems with state-dependent delay in Banach spaces. Nonlinear Stud. 2018, 25, 159–171. [Google Scholar]
- Al-Smadi, M.; Arqub, O.A. Computational algorithm for solving fredholm time-fractional partial integrodifferential equations of dirichlet functions type with error estimates. Appl. Math. Comput. 2019, 342, 280–294. [Google Scholar] [CrossRef]
- Al-Smadi, M.; Freihat, A.; Khalil, H.; Momani, S.; Ali Khan, R. Numerical multistep approach for solving fractional partial differential equations. Int. J. Comput. Methods 2017, 14, 1750029. [Google Scholar] [CrossRef]
- Luchko, Y.; Gorenflo, R. Scale-invariant solutions of a partial differential equation of fractional order. Fract. Calc. Appl. Anal. 1998, 1, 63–78. [Google Scholar]
- Buckwar, E.; Luchko, Y. Invariance of a partial differential equation of fractional order under the Lie group of scaling transformations. J. Math. Anal. Appl. 1998, 227, 81–97. [Google Scholar] [CrossRef]
- Xu, Y.; He, Z. The short memory principle for solving Abel differential equation of fractional order. Comput. Math. Appl. 2011, 62, 4796–4805. [Google Scholar] [CrossRef]
- Veeresha, P.; Prakasha, D.G.; Kumar, S. A fractional model for propagation of classical optical solitons by using nonsingular derivative. Math. Methods Appl. Sci. 2020. [Google Scholar] [CrossRef]
- Hasan, S.; Al-Smadi, M.; El-Ajou, A.; Momani, S.; Hadid, S.; Al-Zhour, Z. Numerical approach in the Hilbert space to solve a fuzzy Atangana-Baleanu fractional hybrid system. Chaos Solitons Fractals 2021, 143, 110506. [Google Scholar] [CrossRef]
- Valliammal, N.; Ravichandran, C.; Nisar, K.S. Solutions to fractional neutral delay differential nonlocal systems. Chaos Solitons Fractals 2020, 138, 109912. [Google Scholar] [CrossRef]
- Kumar, S.; Ghosh, S.; Lotayif, M.S.; Samet, B. A model for describing the velocity of a particle in Brownian motion by Robotnov function based fractional operator. Alex. Eng. J. 2020, 59, 1435–1449. [Google Scholar] [CrossRef]
- Bekir, A.; Güner, O.; Cevikel, A.C. Fractional complex transform and exp-function methods for fractional differential equations. In Abstract and Applied Analysis; Hindawi: London, UK, 2013. [Google Scholar]
- Yakar, C.; Çiçek, M.; Gücen, M.B. Boundedness and Lagrange stability of fractional order perturbed system related to unperturbed systems with initial time difference in Caputo’s sense. Adv. Differ. Equ. 2011, 2011, 54. [Google Scholar] [CrossRef]
- Bashiri, T.; Vaezpour, S.M.; Nieto, J.J. Approximating solution of Fabrizio-Caputo Volterra’s model for population growth in a closed system by homotopy analysis method. J. Funct. Spaces 2018, 2018, 3152502. [Google Scholar] [CrossRef]
- Sene, N.; Abdelmalek, K. Analysis of the fractional diffusion equations described by Atangana-Baleanu-Caputo fractional derivative. Chaos Solitons Fractals 2019, 127, 158–164. [Google Scholar] [CrossRef]
- Scherer, R.; Kalla, S.L.; Tang, Y.; Huang, J. The Grünwald–Letnikov method for fractional differential equations. Comput. Math. Appl. 2011, 62, 902–917. [Google Scholar] [CrossRef]
- Aljahdaly, N.H.; Akgül, A.; Shah, R.; Mahariq, I.; Kafle, J. A Comparative Analysis of the Fractional-Order Coupled Korteweg–De Vries Equations with the Mittag–Leffler Law. J. Math. 2022, 2022, 8876149. [Google Scholar] [CrossRef]
- Javeed, S.; Baleanu, D.; Waheed, A.; Khan, M.S.; Affan, H. Analysis of homotopy perturbation method for solving fractional order differential equations. Mathematics 2019, 7, 40. [Google Scholar] [CrossRef]
- Odibat, Z.M.; Momani, S. Application of variational iteration method to nonlinear differential equations of fractional order. Int. J. Nonlinear Sci. Numer. Simul. 2006, 7, 27–34. [Google Scholar] [CrossRef]
- Agarwal, P.; Karimov, E.; Mamchuev, M.; Ruzhansky, M. On boundary-value problems for a partial differential equation with Caputo and Bessel operators. In Recent Applications of Harmonic Analysis to Function Spaces, Differential Equations, and Data Science; Springer: Berlin, Germany, 2017; pp. 707–718. [Google Scholar]
- Al-Smadi, M.; Arqub, O.A.; Momani, S. Numerical computations of coupled fractional resonant Schrödinger equations arising in quantum mechanics under conformable fractional derivative sense. Phys. Scr. 2020, 95, 075218. [Google Scholar] [CrossRef]
- Feynman, R.P.; Hibbs, A.R.; Styer, D.F. Quantum Mechanics and Path Integrals; Courier Corporation: North Chelmsford, MA, USA, 2010. [Google Scholar]
- Laskin, N. Fractional Schrödinger equation. Phys. Rev. E 2012, 66, 056108. [Google Scholar] [CrossRef]
- Laskin, N. Fractional quantum mechanics and Lévy path integrals. Phys. Lett. A 2000, 268, 298–305. [Google Scholar] [CrossRef]
- Naber, M. Time fractional Schrödinger equation. J. Math. Phys. 2004, 45, 3339–3352. [Google Scholar] [CrossRef]
- Muslih, S.I.; Agrawal, O.P.; Baleanu, D. A Fractional Schrödinger Equation and Its Solution. Int. J. Theor. Phys. 2010, 49, 1746–1752. [Google Scholar] [CrossRef]
- Messiah, A. Quantum Mechanics; Courier Corporation: North Chelmsford, MA, USA, 2014. [Google Scholar]
- Guo, B.; Han, Y.; Xin, J. Existence of the global smooth solution to the period boundary value problem of fractional nonlinear Schrödinger equation. Appl. Math. Comput. 2008, 204, 468–477. [Google Scholar] [CrossRef]
- Jumarie, G. An approach to differential geometry of fractional order via modified Riemann-Liouville derivative. Acta Math. Sin. Engl. Ser. 2019, 28, 1741–1768. [Google Scholar] [CrossRef]
- Jumarie, G. Table of some basic fractional calculus formulae derived from a modified Riemann–Liouville derivative for non-differentiable functions. Appl. Math. Lett. 2009, 22, 378–385. [Google Scholar] [CrossRef]
- Iomin, A. Fractional-time Schrödinger equation: Fractional dynamics on a comb. Chaos Solitons Fractals 2011, 44, 348–352. [Google Scholar] [CrossRef]
- Tofighi, A. Probability structure of time fractional Schrödinger equation. Acta Phys. Pol.-Ser. A Gen. Phys. 2009, 116, 114. [Google Scholar] [CrossRef]
- Alabedalhadi, M. Exact travelling wave solutions for nonlinear system of spatiotemporal fractional quantum mechanics equations. Alex. Eng. J. 2022, 61, 1033–1044. [Google Scholar] [CrossRef]
- Hulstman, M.V. The Painlevé analysis and exact travelling wave solutions to nonlinear partial differential equations. Math. Comput. Model. 1993, 18, 151–156. [Google Scholar] [CrossRef]
- Iqbal, M.; Zhang, Y. Painlevé analysis for (2 + 1)-dimensional non-linear Schrödinger equation. Appl. Math. 2017, 8, 1539–1545. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Ramani, A.; Segur, H.A. Connection between nonlinear evolution equations and ordinary differential equation of P-type. J. Math. Phys. 1980, 21, 715–721. [Google Scholar] [CrossRef]
- Weiss, J.; Tabor, M.; Carnevale, G. The Painlevé property for partial differential equations. J. Math. Phys. 1983, 24, 522–526. [Google Scholar] [CrossRef]
- Ramani, A.; Grammaticos, B.; Bountis, T. The Painlevé property and singularity analysis of integrable and non-integrable systems. Phys. Rep. 1989, 180, 159–245. [Google Scholar] [CrossRef]
- Baldwin, D.E. Symbolic Algorithms and Software for the Painlevé Test and Recursion Operator for Nonlinear Partial Diffrential Equations. Ph.D. Thesis, Colorado School of Mines, Golden, CO, USA, 2004. [Google Scholar]
- Abdou, M.A. A generlaized auxiliary equation method and its applications. Nonlinear Dyn. 2008, 52, 95–102. [Google Scholar] [CrossRef]
- Seadawy, A.R.; Cheemaa, N. Application of extended modified auxiliary equation mapping method for high order dispersive extended nonlinear Schrödinger equation in nonlinear optics. Mod. Phys. Lett. B 2019, 33, 1950203. [Google Scholar] [CrossRef]
- Wu, G.Z.; Yu, L.J.; Wang, Y.Y. Fractional optical solitons of the space-time fractional nonlinear Schrödinger equation. Optik 2020, 207, 164405. [Google Scholar] [CrossRef]
- Rezazadeh, H.; Odabasi, M.; Tariq, K.U.; Abazari, R.; Baskonus, H.M. On the conformable nonlinear Schrödinger equation with second order spatiotemporal and group velocity dispersion coefficients. Chin. J. Phys. 2021, 72, 403–414. [Google Scholar] [CrossRef]
- Liang, X.; Khaliq, A.Q.M.; Bhatt, H.; Furati, K.M. The locally extrapolated exponential splitting scheme for multi-dimensional nonlinear space-fractional Schrödinger equations. Numer. Algorithms 2017, 76, 939–958. [Google Scholar] [CrossRef]
- Abdel-Salam, E.A.B.; Yousif, E.A. Solution of nonlinear space-time fractional differential equations using the fractional Riccati expansion method. Math. Probl. Eng. 2013, 2013, 846283. [Google Scholar] [CrossRef]
- Li, M.; Gu, X.M.; Huang, C.; Fei, M.; Zhang, G. A fast linearized conservative finite element method for the strongly coupled nonlinear fractional Schrödinger equations. J. Comput. Phys. 2018, 358, 256–282. [Google Scholar] [CrossRef]
- Guo, B.; Huang, D. Existence and stability of standing waves for nonlinear fractional Schrödinger equations. J. Math. Phys. 2012, 53, 083702. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khoso, I.A.; Katbar, N.M.; Akram, U. Optical Dromions for Spatiotemporal Fractional Nonlinear System in Quantum Mechanics. Quantum Rep. 2023, 5, 546-564. https://doi.org/10.3390/quantum5030036
Khoso IA, Katbar NM, Akram U. Optical Dromions for Spatiotemporal Fractional Nonlinear System in Quantum Mechanics. Quantum Reports. 2023; 5(3):546-564. https://doi.org/10.3390/quantum5030036
Chicago/Turabian StyleKhoso, Ihsan A., Nek Muhammad Katbar, and Urooj Akram. 2023. "Optical Dromions for Spatiotemporal Fractional Nonlinear System in Quantum Mechanics" Quantum Reports 5, no. 3: 546-564. https://doi.org/10.3390/quantum5030036
APA StyleKhoso, I. A., Katbar, N. M., & Akram, U. (2023). Optical Dromions for Spatiotemporal Fractional Nonlinear System in Quantum Mechanics. Quantum Reports, 5(3), 546-564. https://doi.org/10.3390/quantum5030036