



Time-Dependent Shortest Path Optimization in Urban Multimodal Transportation Networks with Integrated Timetables

Abstract
1. Introduction
2. Literature Review
2.1. Studies on Transportation Modes and Travel Path Selection
2.2. Urban Multimodal Transportation Path Optimization
2.3. Algorithms Considering a Time-Dependent Network for the Shortest Path Problem
3. Problem Description and Modeling Framework
3.1. Problem Description
| Algorithm 1: Calculation method for . |
| 1: ,; 2: while do 3: 4: 5: 6: 7: end while 8: 9: end |
3.2. Model Framework
4. Two GA-Based Algorithms
| Algorithm 2: V-GA (or F-GA). |
| Require: Parameters Pc, Pm, termination condition Nd, population size 1: Initialize the population 2: for all Nd do 3: Calculate the fitness Fit of each genetic individual in the population 4: Update the global best solution 5: Selection 6: Crossover 7: Mutation 8: end |
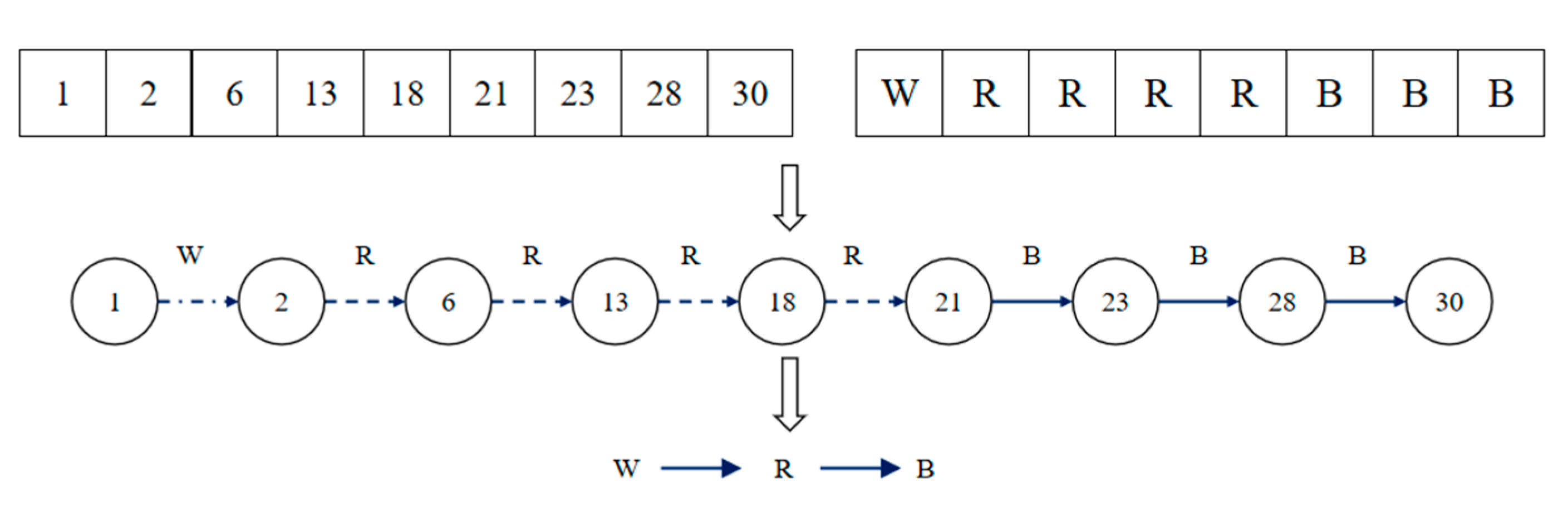
4.1. Coding and Decoding
4.2. Initial Population Generation
- (1)
- V-GA
- (2)
- F-GA
4.3. Calculating Individual Fitness Values
4.4. Selection
- (1)
- Roulette selection
- (2)
- Random traversal sampling
- (3)
- Local selection
- (4)
- Truncated selection
- (5)
- Tournament selection
4.5. Crossover
- (1)
- V-GA
| Algorithm 3: For crossover of V-GA. |
| Require: Parent solutions S1 and S2, crossover probability Pc 1: if random() <= Pc then 2: Get segments S1-1, S2-1 from S1, S2 3: Calculate the number of identical nodes n (excluding start and end points) 4: if n = 0 then 5: if min (length(S1-1), length(S2-1)) = 2 then 6: print S1 and S2 7: else then 8: Randomly choose the crossover point 9: Crossover to form O1-1, O2-1 10: if not connected at crossover points, then 11: Find connecting path 12: end if 13: end if 14: else then 15: Randomly select the identical node (excluding ends) as the crossover point 16: Crossover to form O1-1, O2-1 17: end if 18: if cycles in O1-1 or O2-1, then 19: Remove cycles 20: end if 21: Keep the original transportation mode for unchanged segments 22: Randomly select transportation mode for changed segments 23: (Optional) Further process or evaluate O1, O2 24: end if |
- (2)
- F-GA
4.6. Mutation
- (1)
- V-GA
| Algorithm 4: Mutation of V-GA. |
| Require: Parent solutions S1, mutation probability Pm
1: extract segment S1-1 from S1 with length n 2: if random() <= Pm then 3: Choose random mutation position k in S1-1 4: Remove the kth gene from S1-1 5: Find the path between (k−1)th and (k+1)th genes using Floyd’s 6: Insert this path into S1-1 to form a new segment O1-1 7 if O1-1 is unchanged then 8: keep original transportation modes 9: else then 10: Randomly select new transportation modes 11: end if 12: end if |
- (2)
- F-GA
4.7. Elitism Strategy and Termination Condition
4.8. Algorithm Complexity Analysis
- In V-GA, crossover must handle both same-node and different-node operations. Same-node crossover has an O(k) time complexity, while different-node crossover requires O(k2). Thus, the overall crossover complexity for V-GA is O(m × k2).
- In F-GA, crossover is simpler, achieved by exchanging partial gene sequences, with a time complexity of O(m × k).
- V-GA performs node deletion and reconnection, resulting in a mutation time complexity of O(k2) per individual, or O(m × k2) for the population.
- F-GA only needs to swap two randomly selected genes, with a mutation time complexity of O(1) per individual and O(m) overall.
5. Computational Experiments
6. Conclusions
- (1)
- Model Extension: Real-world urban multimodal networks are marked by various uncertainties. Future work could systematically include factors like traffic flow fluctuations, public transportation schedule unpredictability, and dynamic changes in user travel preferences. Developing stochastic or dynamic network models would enable more realistic and in-depth study of the path optimization problem, aligning research outcomes more closely with actual travel scenarios.
- (2)
- Introduction of Soft Time Window Constraints and Delay Penalty Mechanisms: To enhance the realism and robustness of path planning, future studies could introduce soft time window constraints and delay penalties. This would facilitate a more accurate simulation of missed or delayed trips, thereby improving the adaptability and stability of the V-GA method in complex urban transportation environments and making the planning results more practical and reliable.
- (3)
- Algorithm Improvement: Building on the findings of this study, future work could explore more advanced intelligent optimization algorithms to enhance computational efficiency and optimization performance. This would improve the overall stability and effectiveness of multimodal transportation systems, providing more efficient and higher-quality solutions for real-world applications.
- (4)
- Integration of Data-Driven and Artificial Intelligence Technologies: Future research could fully leverage historical travel and user behavior data, combined with artificial intelligence techniques, to learn from actual users’ travel patterns. This would enable dynamic optimization and adaptive model adjustment, supporting the creation of a smarter, more adaptable, and reliable multimodal transportation system that better meets diverse and personalized travel needs.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sifaoui, T.; Aïder, M. Beyond green borders: An innovative model for sustainable transportation in supply chains. ARIRO-Oper. Res. 2024, 58, 2185–2237. [Google Scholar] [CrossRef]
- Bellman, R. On a routing problem. Q. Appl. Math. 1958, 16, 87–90. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Witzgall, C.; Goldman, A.J. Most profitable routing before maintenance. In Proceedings of the 27th National ORSA Meeting, Boston, MA, USA, 6–7 May 1965; Volume 13, p. B-82. [Google Scholar]
- Nguyen, S.; Pallottino, S. Equilibrium traffic assignment for large scale transit networks. Eur. J. Oper. Res. 1988, 37, 176–186. [Google Scholar] [CrossRef]
- Spiess, H. On Optimal Route Choice Strategies in Transit Networks; Université de Montréal, Centre de Recherche sur les Transports: Montreal, QC, Canada, 1983; Volume 286. [Google Scholar]
- Afrasyabi, P.; Mesgari, M.S.; Khodadai, N.; Kaveh, M. CBMODPSO: Crossover based multi-objective discrete particle swarm optimization for solving multi-modal routing problem. Res. Sq. 2022. preprint. [Google Scholar]
- Lee, K.; Jiang, Y.; Ceder, A.A.; Dauwels, J.; Su, R.; Nielsen, O.A. Path-oriented synchronized transit scheduling using time-dependent data. Transp. Res. Part C Emerg. Technol. 2022, 136, 103505. [Google Scholar] [CrossRef]
- Zhu, J.X.; Luo, Q.Y.; Guan, X.Y.; Yang, J.L.; Bing, X. A traffic assignment approach for multi-modal transportation networks considering capacity constraints and route correlations. IEEE Access 2020, 8, 158862–158874. [Google Scholar] [CrossRef]
- Song, Y.; Li, D.; Cao, Q.; Yang, M.; Ren, G. The whole day path planning problem incorporating mode chains modeling in the era of mobility as a service. Transp. Res. Part C Emerg. Technol. 2021, 132, 103360. [Google Scholar] [CrossRef]
- Zhang, T.; Hu, D.; Chen, H. Research on Urban Multi-Mode Public Transport Trip Path Based on Super Network Theory; CICTP: Xi’an, China, 2020; pp. 2502–2513. [Google Scholar]
- Kumar, P.; Khani, A. Schedule-based transit assignment with online bus arrival information. Transp. Res. Part C Emerg. Technol. 2023, 155, 104282. [Google Scholar] [CrossRef]
- Wang, S.; Yang, Y.; Hu, X.; Li, J.; Xu, B. Solving the K-shortest paths problem in timetable-based public transportation systems. J. Intell. Transp. Syst. 2016, 20, 413–427. [Google Scholar] [CrossRef]
- Dib, O.; Manier, M.A.; Moalic, L. Advanced modeling approach for computing multicriteria shortest paths in multimodal transportation networks. In Proceedings of the 2016 IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 20–22 August 2016; pp. 40–44. [Google Scholar]
- Dib, O.; Moalic, L.; Manier, M.A.; Caminada, A. An advanced GA–VNS combination for multicriteria route planning in public transit networks. Expert Syst. Appl. 2017, 72, 67–82. [Google Scholar] [CrossRef]
- Idri, A.; Oukarfi, M.; Boulmakoul, A.; Zeitouni, K.; Masri, A. A new time-dependent shortest path algorithm for multimodal transportation network. Procedia Comput. Sci. 2017, 109, 692–697. [Google Scholar] [CrossRef]
- Dib, O.; Manier, M.A.; Caminada, A. Memetic algorithm for computing shortest paths in multimodal transportation networks. Transp. Res. Procedia 2015, 10, 745–755. [Google Scholar] [CrossRef]
- Wang, X.; Lv, Y.; Sun, H.; Xu, G.; Qu, Y.; Wu, J. A simulation-based metro train scheduling optimization incorporating multimodal coordination and flexible routing plans. Transp. Res. Part C Emerg. Technol. 2023, 146, 103964. [Google Scholar] [CrossRef]
- Peng, Y.; Yong, P.; Luo, Y. The route problem of multimodal transportation with timetable under uncertainty: Multi-objective robust optimization model and heuristic approach. RAIRO-Oper. Res. 2021, 55, S3035–S3050. [Google Scholar] [CrossRef]
- Peng, Y.; Luo, Y.J.; Jiang, P.; Yong, P.C. The route problem of multimodal transportation with timetable: Stochastic multi-objective optimization model and data-driven simheuristic approach. Eng. Comput. 2022, 39, 587–608. [Google Scholar] [CrossRef]
- Kumar, B.A.; Gracious, R.; Gangrade, C.; Vanajakshi, L. City-level route planning with time-dependent networks. Curr. Sci. 2020, 119, 680–690. [Google Scholar] [CrossRef]
- He, E.; Boland, N.; Nemhauser, G.; Savelsbergh, M. Time-dependent shortest path problems with penalties and limits on waiting. Inf. J. Comput. 2021, 33, 997–1014. [Google Scholar] [CrossRef]
- Jaballah, R.; Veenstra, M.; Coelho, L.C.; Renaud, J. The time-dependent shortest path and vehicle routing problem. INFOR Inf. Syst. Oper. Res. 2021, 59, 592–622. [Google Scholar] [CrossRef]
- Gmira, M.; Gendreau, M.; Lodi, A.; Potvin, J.Y. Tabu search for the time-dependent vehicle routing problem with time windows on a road network. Eur. J. Oper. Res. 2021, 288, 129–140. [Google Scholar] [CrossRef]
- Pugliese, L.D.P.; Ferone, D.; Festa, P.; Guerriero, F. Shortest path tour problem with time windows. Eur. J. Oper. Res. 2020, 282, 334–344. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, Y.; Zhang, Y.; Baldacci, R.; Tang, J.; Luo, X.; Sun, W. Branch-cut-and-price for the time-dependent green vehicle routing problem with time windows. Inf. J. Comput. 2023, 35, 14–30. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, C.; Xu, Q. Time-dependent green location-routing problem under carbon cap-and-trade policy. Transp. Res. Rec. 2023, 2677, 1135–1150. [Google Scholar] [CrossRef]
- Chen, P.; Tong, R.; Yu, B.; Wang, Y. Reliable shortest path finding in stochastic time-dependent road network with spatial-temporal link correlations: A case study from Beijing. Expert Syst. Appl. 2020, 147, 113192. [Google Scholar] [CrossRef]
- Cui, S.; Sun, Q.; Zhang, Q. A time-dependent vehicle routing problem for instant delivery based on memetic algorithm. Comput. Intell. Neurosci. 2022, 2022, 5099008. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, W.; Guan, W.; Ran, B. Time-dependent urban customized bus routing with path flexibility. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2381–2390. [Google Scholar] [CrossRef]
- Sun, Y. Fuzzy approaches and simulation-based reliability modeling to solve a road–rail intermodal routing problem with soft delivery time windows when demand and capacity are uncertain. Int. J. Fuzzy Syst. 2020, 22, 2119–2148. [Google Scholar] [CrossRef]
- Liao, L.; Yang, S.; Lai, Y.; Zeng, W.; Yang, F.; Jiang, M. Efficient estimation of time-dependent shortest paths based on shortcuts. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing, Copenhagen, Denmark, 10–12 October 2022; Springer International Publishing: Cham, Switzerland, 2022; pp. 18–32. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| Total travel time | |
| The passenger’s departure moment from node i. The passenger’s starting moment is given | |
| The passenger’s arrival moment at node i | |
| The moment when the passenger completes the transfer at node i | |
| Travel time spent to reach node j from node i at moment with mode m | |
| Time spent transferring from mode m to mode n at node i | |
| Waiting time or non-transfer stop time at node i | |
| Maximum number of transfers | |
| Maximum travel cost incurred | |
| Operating cost per unit time of using mode m from node i to node j | |
| Transfer cost per unit time from mode m to mode n at node i | |
| Waiting cost per unit time at node i | |
| Timetable corresponding to the use of mode m from node i to node j | |
| A function represents the departure time based on moment when the passenger arrives at the platform with the public transportation schedule µ | |
| Mode | Bus | Rail | Walk | |||
|---|---|---|---|---|---|---|
| Travel speed at different modes (km/h) | Peak time | Off-peak time | 60 | 5 | ||
| 7:30–8:30 | 12:00–13:00 | 18:00–19:00 | ||||
| 25 | 35 | |||||
| Departure interval (min) | 8 | 5 | 0 | |||
| First vehicle hour | 6:00 | 6:00 | NO | |||
| Final vehicle hour | 23:00 | 23:00 | NO | |||
| Mode | Bus Transfer Time (min) | ||
|---|---|---|---|
| Bus | Rail | Walk | |
| Bus | 2 | 2 | 0 |
| Rail | 2 | 2 | 0 |
| Walk | 0 | 0 | 0 |
| Operating Cost | Transfer Cost | Waiting Cost | |||||
|---|---|---|---|---|---|---|---|
| Mode | - | Bus | Rail | Walk | Bus | Rail | Walk |
| Bus | 1.2 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 0 |
| Rail | 1 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 0 |
| Walk | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | 0 |
| Name Pc-Pm | F-GA | V-GA | ||||||
|---|---|---|---|---|---|---|---|---|
| B | A | Time | N | B | A | Time | N | |
| 0.9-0.8 | 554.06 | 558.57 | 64.82 | 14.75 | 546.06 | 553.06 | 117.87 | 8.75 |
| 0.9-0.3 | 555.43 | 559.74 | 92.14 | 4.13 | 554.06 | 554.40 | 106.60 | 12.75 |
| 0.9-0.1 | 554.06 | 558.91 | 99.28 | 3.13 | 554.06 | 555.23 | 104.92 | 23.63 |
| 0.8-0.8 | 555.43 | 558.09 | 67.48 | 9.25 | 546.06 | 552.06 | 120.33 | 10.25 |
| 0.8-0.4 | 554.06 | 556.26 | 86.58 | 5.13 | 546.06 | 553.06 | 108.50 | 6.88 |
| 0.8-0.2 | 554.06 | 558.74 | 90.77 | 3.63 | 546.06 | 552.06 | 103.80 | 25.25 |
| 0.7-0.9 | 555.43 | 559.74 | 61.58 | 13.13 | 546.06 | 553.06 | 126.57 | 8.25 |
| 0.7-0.7 | 555.43 | 557.91 | 71.10 | 5.38 | 546.06 | 550.06 | 116.91 | 13.75 |
| 0.7-0.3 | 555.43 | 559.57 | 90.69 | 3.50 | 546.06 | 552.06 | 105.55 | 19.00 |
| 0.7-0.1 | 555.43 | 558.74 | 100.69 | 6.50 | 554.06 | 554.23 | 103.67 | 18.00 |
| 0.6-0.5 | 554.06 | 555.91 | 80.81 | 3.88 | 546.06 | 553.06 | 114.98 | 11.13 |
| 0.6-0.4 | 555.43 | 557.91 | 82.77 | 4.38 | 546.06 | 550.06 | 110.34 | 17.88 |
| 0.6-0.1 | 555.43 | 561.40 | 99.96 | 3.13 | 554.06 | 555.06 | 102.24 | 21.75 |
| 0.5-0.6 | 554.06 | 557.74 | 30.42 | 8.38 | 546.06 | 553.23 | 114.93 | 9.38 |
| 0.5-0.1 | 554.06 | 557.09 | 98.82 | 7.88 | 546.06 | 555.74 | 108.29 | 9.75 |
| 0.4-0.9 | 554.06 | 556.57 | 60.55 | 13.13 | 554.06 | 554.23 | 126.09 | 6.75 |
| 0.4-0.4 | 554.06 | 559.40 | 84.24 | 9.00 | 554.06 | 554.06 | 110.87 | 10.63 |
| 0.3-0.6 | 554.06 | 562.23 | 75.97 | 13.38 | 546.06 | 553.23 | 115.25 | 7.63 |
| 0.3-0.3 | 554.06 | 556.74 | 92.99 | 4.50 | 546.06 | 553.57 | 106.16 | 13.25 |
| 0.2-0.7 | 554.06 | 557.85 | 72.24 | 6.50 | 546.06 | 553.06 | 117.45 | 9.25 |
| 0.2-0.2 | 555.43 | 557.26 | 95.05 | 3.75 | 546.06 | 553.40 | 108.52 | 24.38 |
| 0.1-0.9 | 554.06 | 561.57 | 61.29 | 9.75 | 554.06 | 556.06 | 122.05 | 6.63 |
| 0.1-0.6 | 555.43 | 559.91 | 76.12 | 8.00 | 546.06 | 553.06 | 113.33 | 6.88 |
| 0.1-0.2 | 554.06 | 556.74 | 91.65 | 12.13 | 554.06 | 554.23 | 106.74 | 12.50 |
| Population | ||||||||
|---|---|---|---|---|---|---|---|---|
| 10 | 20 | 40 | 60 | 80 | 100 | |||
| Pc = 0.7 Pm = 0.7 | F-GA | A | 568.0571 | 559.4 | 558.7429 | 557.9143 | 562.5714 | 555.7429 |
| Time | 11.46738 | 22.62325 | 45.95263 | 71.10338 | 94.20925 | 116.1336 | ||
| V-GA | A | 558.3786 | 558.3357 | 553.0571 | 550.0571 | 553.1643 | 554.0571 | |
| Time | 22.57088 | 39.468 | 78.75225 | 116.9114 | 154.208 | 192.656 | ||
| Pc = 0.6 Pm = 0.4 | F-GA | A | 570.0571 | 560.5857 | 557.2571 | 557.9143 | 557.9143 | 555.9143 |
| Time | 15.31663 | 28.9755 | 59.51288 | 82.77225 | 117.9396 | 147.6763 | ||
| V-GA | A | 559.2714 | 551.5714 | 553.2286 | 550.0571 | 554.0571 | 554.0571 | |
| Time | 19.34338 | 38.4445 | 72.09388 | 110.3396 | 142.5933 | 180.8901 | ||
| Pc = 0.3 Pm = 0.4 | F-GA | A | 570.0571 | 555.2571 | 559.7429 | 555.2571 | 557.9143 | 557.7429 |
| Time | 14.79075 | 29.47525 | 60.0655 | 84.97813 | 120.4121 | 148.24 | ||
| V-GA | A | 562.0571 | 557.5714 | 555.5714 | 553.4000 | 555.0571 | 553.0571 | |
| Time | 19.06763 | 38.40013 | 75.0770 | 107.176 | 148.2523 | 182.4553 | ||
| Pc = 0.6 Pm = 0.5 | F-GA | A | 570.0571 | 558.9143 | 557.0857 | 555.9143 | 558.5714 | 559.5071 |
| Time | 14.74613 | 26.57588 | 54.47025 | 80.80975 | 108.73 | 135.8535 | ||
| V-GA | A | 561.2286 | 553.5714 | 554.5714 | 553.0571 | 553.0571 | 554.2286 | |
| Time | 20.50638 | 38.90213 | 77.49388 | 114.9799 | 149.0383 | 184.968 | ||
| Metric | F-GA Mean | V-GA Mean | t-Value | p-Value | Significance (p < 0.05) |
|---|---|---|---|---|---|
| Best fitness value (B) | 554.6308 | 548.7267 | 7.315 | <0.001 | yes |
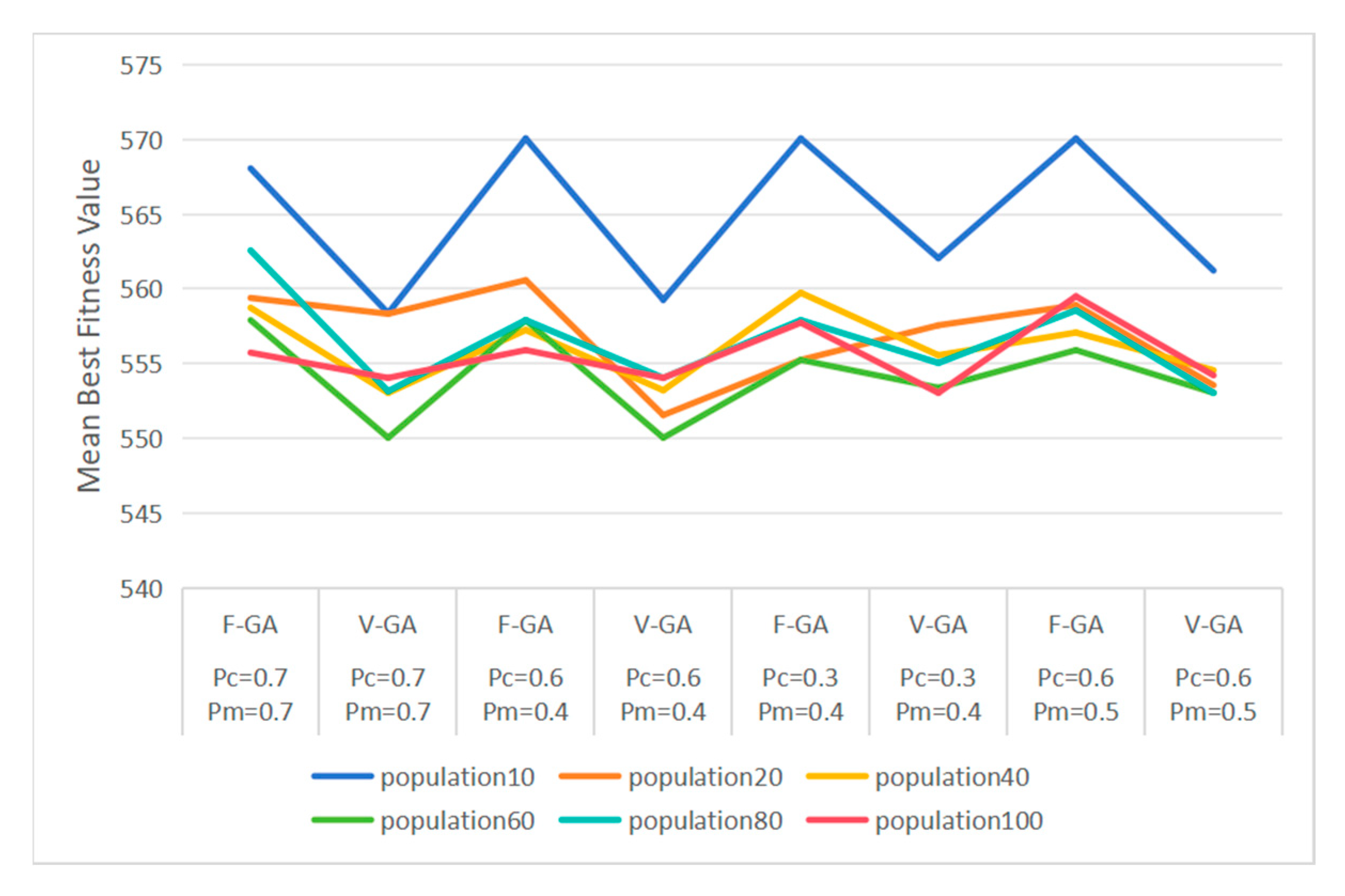
| Mean best fitness value (A) | 558.5246 | 553.3887 | 12.57 | <0.001 | yes |
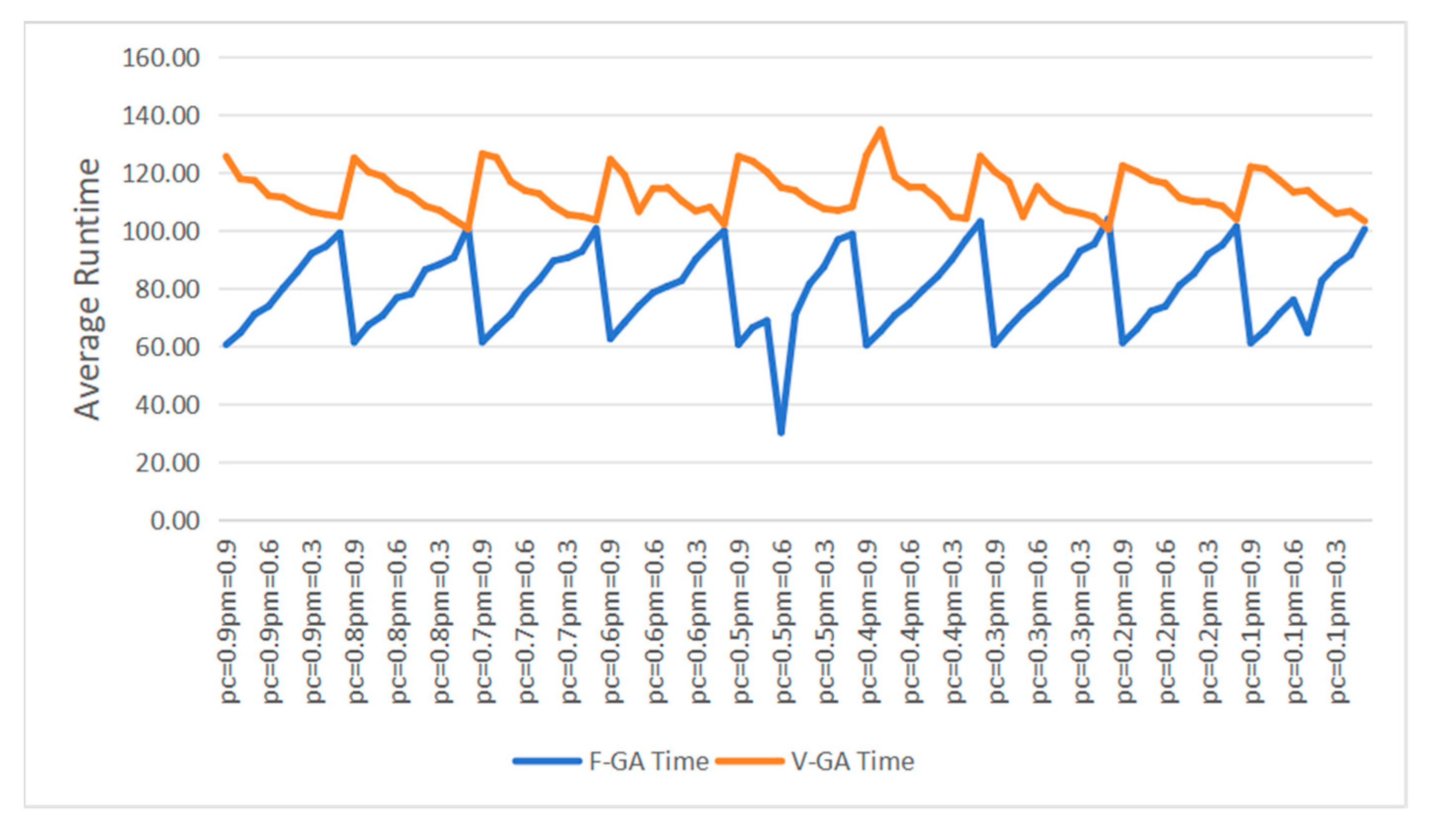
| Average runtime (time) | 80.3338 | 112.165 | −6.785 | <0.001 | yes |
| Mean number of iterations (N) | 7.3467 | 13.0958 | −3.133 | 0.005 | yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Y.; Ma, A.; Yu, D.Z.; Zhao, T.; Xiang, C. Time-Dependent Shortest Path Optimization in Urban Multimodal Transportation Networks with Integrated Timetables. Vehicles 2025, 7, 43. https://doi.org/10.3390/vehicles7020043
Peng Y, Ma A, Yu DZ, Zhao T, Xiang C. Time-Dependent Shortest Path Optimization in Urban Multimodal Transportation Networks with Integrated Timetables. Vehicles. 2025; 7(2):43. https://doi.org/10.3390/vehicles7020043
Chicago/Turabian StylePeng, Yong, Aizhen Ma, Dennis Z. Yu, Ting Zhao, and Chester Xiang. 2025. "Time-Dependent Shortest Path Optimization in Urban Multimodal Transportation Networks with Integrated Timetables" Vehicles 7, no. 2: 43. https://doi.org/10.3390/vehicles7020043
APA StylePeng, Y., Ma, A., Yu, D. Z., Zhao, T., & Xiang, C. (2025). Time-Dependent Shortest Path Optimization in Urban Multimodal Transportation Networks with Integrated Timetables. Vehicles, 7(2), 43. https://doi.org/10.3390/vehicles7020043