
Adaptive Curve Passing Control in Autonomous Vehicles with Integrated Dynamics and Camera-Based Radius Estimation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Estimation of Curve Radius
2.1. Perceiving Lane Lines
2.2. Fusion Radius
2.3. Filtering Techniques
2.3.1. Mean Filtering
2.3.2. Variable Parameter First-Order Low-Pass Filtering
2.3.3. Variable Parameter First-Order Low-Pass Filtering Based on Error Ratio
2.3.4. Variable Parameter First-Order Low-Pass Filtering Based on Radius Change Characteristics
3. Curve Cruise Control with Integrated Speed Regulation
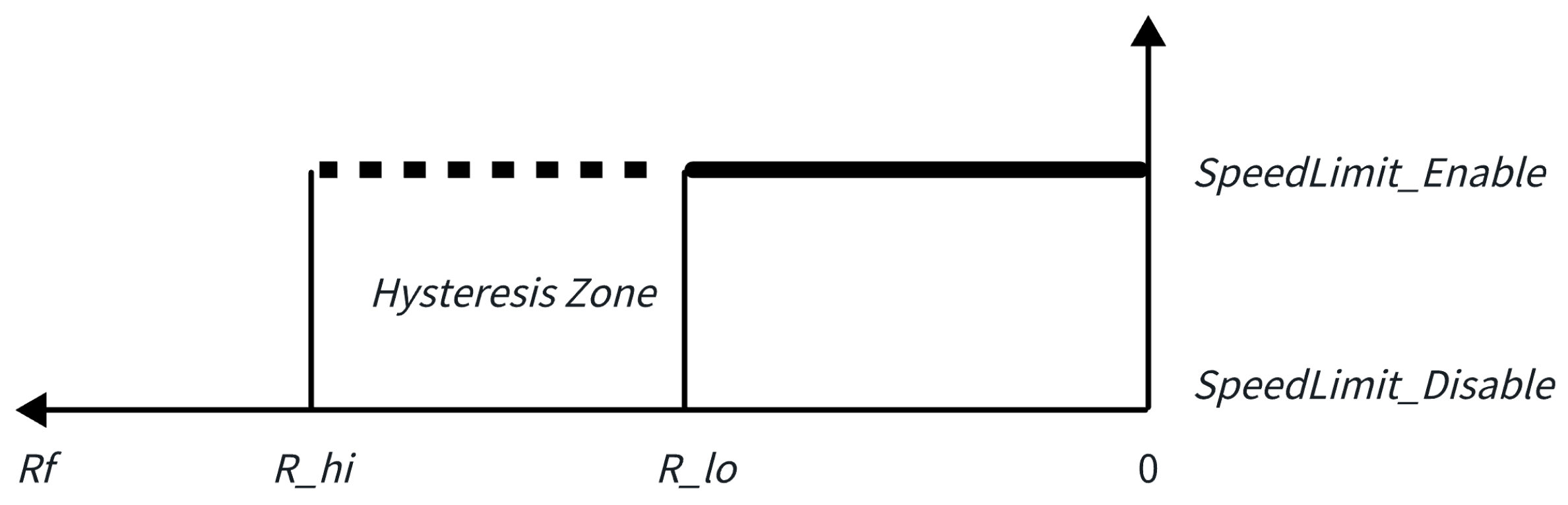
3.1. Speed Limit Hysteresis Zones
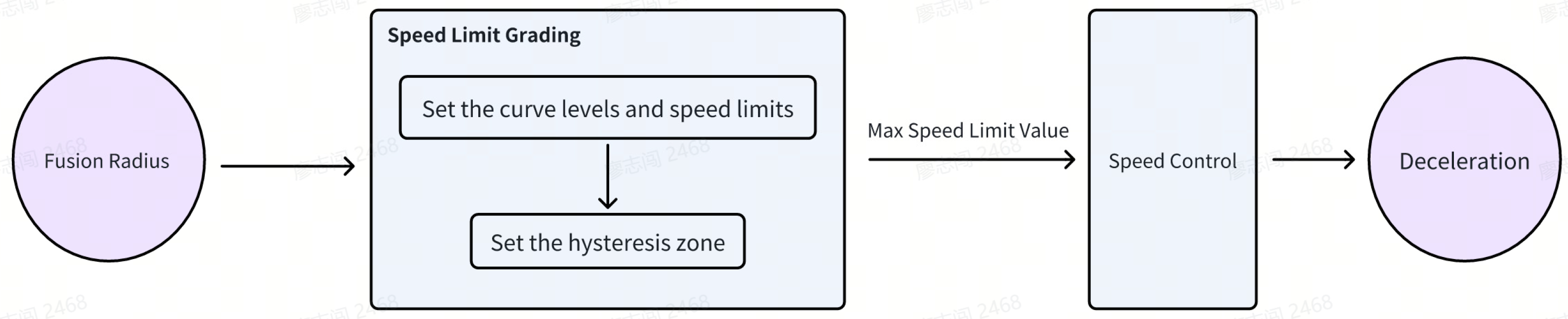
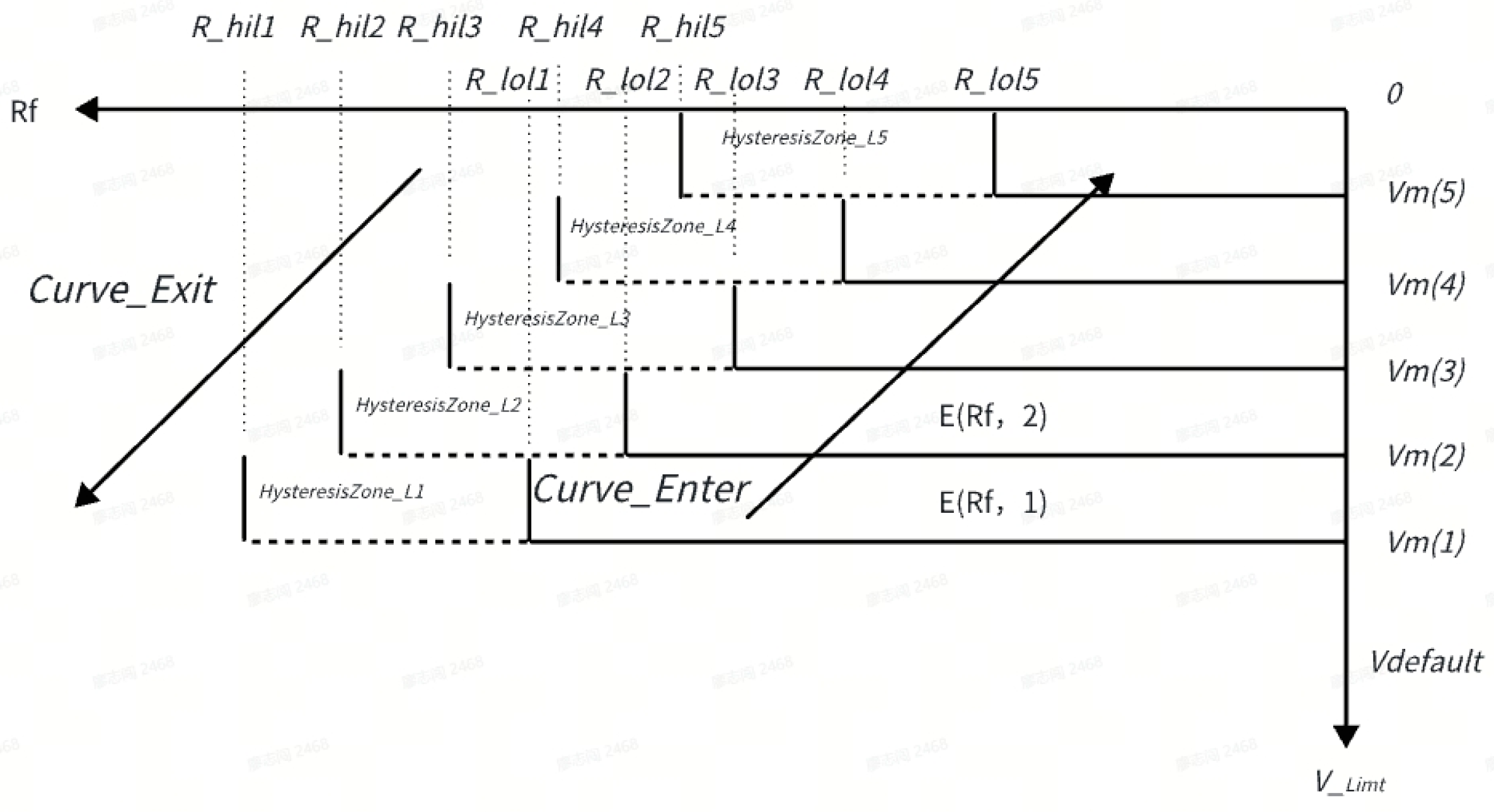
3.2. Speed Limit Grading
3.3. Speed Limit Control
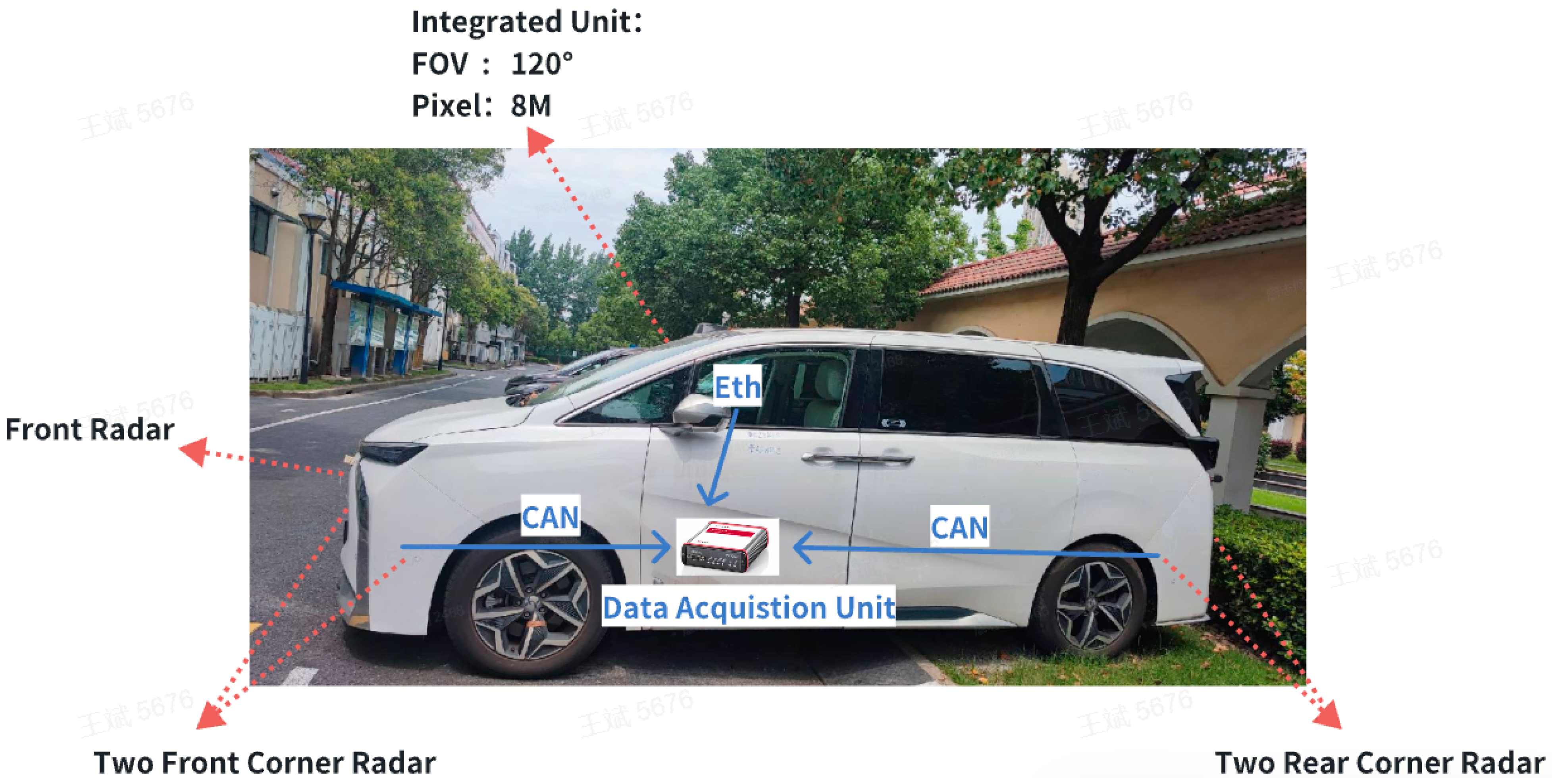
4. Experimental Data and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xilong, Z. Research on the Development Status of Vehicle Adaptive Cruise Control System. Automob. Appl. Technol. 2024, 49, 29–34. [Google Scholar]
- Ruitian, L. Research on Adaptive Cruise Control Method for Intelligent Vehicles in Curves; Dalian University of Technology: Dalian, China, 2022. [Google Scholar]
- Allaby, P.; Hellinga, B.; Bullock, M. Variable Speed Limits: Safety and Operational Impacts of a Candidate Control Strategy for Freeway Applications. IEEE Trans. Intell. Transp. Syst. 2007, 8, 671–680. [Google Scholar] [CrossRef]
- Baochneg, T.; Tian, L.; Bo, L. Curve Control Technology on Unmanned Vehicle. Comput. Digit. Eng. 2016, 44, 591–595. [Google Scholar]
- Haifeng, L.; Xianzhong, C.; Zhigang, D. Safe Vehicular Velocity Analysis on Express Canale M. Personalization of ACC stop and go task based on human driver behaviour analysis. IFAC Proc. Vol. 2002, 35, 357–362. [Google Scholar]
- Dengke, T. Research on the Relationship between Drivers’ Physiological and Psychological Reactions and Road Alignment; Southeast University: Nanjing, China, 2006. [Google Scholar]
- Gonzalez, D.; Perez, J.; Milanes, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M. Sampling-based robot motion planning: A review. IEEE Access 2014, 2, 56–77. [Google Scholar] [CrossRef]
- Min, Z. Research on Fuel Economy of Automatic Variable Speed Vehicle Driving on Ramp; Beijing Institute of Technology: Beijing, China, 2016. [Google Scholar]
- Jiawei, Y. Research on Curve Speed Planning and Trajectory Tracking Control of Autonomous Vehicle; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2022. [Google Scholar]
- Asadi, B.; Vahidi, A. Predictive Cruise Control: Utilizing Upcoming Traffic Signal Information for Improving Fuel Economy and Reducing Trip Time. IEEE Trans. Control. Syst. Technol. 2011, 19, 707–714. [Google Scholar] [CrossRef]
- Yi, K.; Ryu, N.; Yoon, H.J.; Huh, K.; Cho, D.; Moon, I. Implementation and vehicle tests of a vehicle stop-and-go cruise control system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2002, 216, 537–544. [Google Scholar] [CrossRef]
- Gerdes, J.C.; Hedrick, J.K. Vehicle speed and spacing control via coordinated throttle and brake actuation. Control. Eng. Pract. 1997, 5, 1607–1614. [Google Scholar] [CrossRef]
- Wang, J.; Longoria, R.G. Effect of Computational Delay on the Performance of a Hybrid Adaptive Cruise Control System. In Proceedings of the SAE 2006 World Congress & Exhibition, Detroit, MI, USA, 3–6 April 2006; SAE Technical Papers. Volume 14, pp. 53–57. [Google Scholar]
- Winner, H.; Hakuli, S.; Lotz, F.; Singer, C. Handbook of Driver Assistance Systems; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Min, D.; Lin, Z.; Yin, Z. Attitude Estimation Method for Quadrotor UAVs Based on Extended Kalman Filter. Mod. Inf. Technol. 2022, 4–7. [Google Scholar]
- Yan, W. Research on Safety and Speed-limit of Oversize Vehicles on Expressway Curve Sections. Highway 2015, 4, 162–168. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Liao, Z.; Guo, S. Adaptive Curve Passing Control in Autonomous Vehicles with Integrated Dynamics and Camera-Based Radius Estimation. Vehicles 2024, 6, 1648-1660. https://doi.org/10.3390/vehicles6030078
Wang B, Liao Z, Guo S. Adaptive Curve Passing Control in Autonomous Vehicles with Integrated Dynamics and Camera-Based Radius Estimation. Vehicles. 2024; 6(3):1648-1660. https://doi.org/10.3390/vehicles6030078
Chicago/Turabian StyleWang, Bin, Zhichuang Liao, and Sijing Guo. 2024. "Adaptive Curve Passing Control in Autonomous Vehicles with Integrated Dynamics and Camera-Based Radius Estimation" Vehicles 6, no. 3: 1648-1660. https://doi.org/10.3390/vehicles6030078
APA StyleWang, B., Liao, Z., & Guo, S. (2024). Adaptive Curve Passing Control in Autonomous Vehicles with Integrated Dynamics and Camera-Based Radius Estimation. Vehicles, 6(3), 1648-1660. https://doi.org/10.3390/vehicles6030078