1. Introduction
As energy overuse and caused pollution pose a potential threat to our environmental and ecological conditions, many researchers have turned their research studies and efforts towards environmental protection. Reducing the amount of energy consumption is of major importance. Environmentally sensitive logistics require a sustainable distribution network with fewer negative impacts on the environment and ecology, since transportation comprises the major part of logistics. Sustainable transportation is a global goal in the field of logistics, and the incorporation of electric vehicles emerges as a pivotal strategy for attaining this objective [
1]. Through the strategic emphasis on sustainability, logistics companies can actively mitigate the adverse environmental consequences of transportation and advance in enduring economic and social sustainability [
2].
Towards this direction, businesses employ the practice of reverse logistics to facilitate the movement of merchandise from its intended endpoint to any location within the supply chain in the opposite direction. Reverse logistics is the process of moving goods from their final destination back to the manufacturer or point of origin for purposes such as returns, recycling, or disposal. Reverse logistics constitutes a category within the realm of supply chain management, encompassing all activities associated with the reversionary flow of products and materials. As a result, reverse logistics is strongly related to many planning problems, which can be considered variants of the vehicle routing problem (VRP).
The traditional VRP is a challenging combinatorial optimization issue, initially introduced in 1959, known to be NP-hard in nature [
3]. The VRP involves the task of finding the most efficient routes for a group of vehicles that commence and conclude their tours at a central depot. The primary goal is to provide services to a group of customers while minimizing the overall cost subject to specific constraints. Typically, this cost is measured as a function of the total distance covered. Several variations in the classical VRP have been investigated and classified in the relevant literature [
4,
5,
6,
7,
8].
In numerous practical scenarios occurring within transportation and distribution systems, customers present dual requirements encompassing both the pick-up and delivery of goods. To this end, researchers have shifted their attention towards an extension of the fundamental VRP, denoted as the vehicle routing problem with simultaneous delivery and pick-up (VRPSDP). The VRPSDP was firstly proposed in [
9] and addresses the challenge of dispatching vehicles from a central depot to deliver goods to customers while concurrently retrieving goods from customers back to the central depot.
Due to the NP-hard nature of the VRPSDP, its inherent complexity grows exponentially with an increase in the number of customers; thus, metaheuristics are used to detect optimal solutions into reasonable computing. The authors in [
10] proposed a generalized formulation of VRPSPD by applying a solution method based on the PSO algorithm. The primary objective of this model is to minimize the routing costs that encompass both fixed transportation costs and variable costs per unit of distance. The computational result exhibits the effectiveness of the proposed PSO method in addressing the VRPSDP.
In [
11], the authors study the VRPSPD time windows considering service quality, which is strongly linked with customer satisfaction. Their proposed model seeks to minimize the cumulative distance covered by vehicles, thereby reducing costs, while simultaneously maximizing the customers’ satisfaction, thus enhancing service quality. The nearest neighbor method provides an initial solution that is improved by the tabu search algorithm. Several group problems are designed to assess the performance of the proposed algorithm.
The researchers in [
12] investigate the fuzzy green VRPSDP with time windows, with the primary objective being to minimize fuel consumption and vehicle emission-related costs. Accordingly, they formulate a mixed-integer nonlinear programming model. Considering fuzziness in both pick-up and delivery demands, a fuzzy approach incorporating credibility measures is adopted. The optimization model is based on an adaptive large neighborhood search heuristic. The experimental outcomes validate the effectiveness and superior performance of the proposed algorithm.
In [
13], an optimization approach is proposed in the context of minimizing carbon emissions costs. To address the simultaneous pick-up and delivery vehicle routing problem, an adaptive genetic hill-climbing algorithm is devised and subsequently validated through numerical experimentation. The authors focus on the environmental issues in the VRPSDP by discussing and analyzing the effects of the carbon tax as well as the effect of vehicle speed on total cost and carbon emissions.
The researchers in [
14] investigate the VRPSDP and developed a vehicle routing model with two optimization criteria: the minimization of the total travel time and the maximization of the total number of goods to be collected. A polynomial time approximation algorithm based on the ε-constraint method is designed to address the problem. The effectiveness of this newly devised approach is assessed using multiple test cases, yielding valuable managerial insights via sensitivity analysis.
The authors in [
15] consider the fuzzy capacitated location-routing problem with simultaneous pick-up and delivery demands. The optimization objective is the minimization of routing costs and fixed costs of establishing depot(s), and the employment of vehicles. A greedy clustering method (GCM) is developed together with the fuzzy credibility theory, which deals with fuzziness. In [
16], the existing pick-up and delivery problems are considered in the context of time windows considering the passenger travel time and toll cost due to the vehicle load considering traffic congestion.
From a green perspective, reducing energy consumption poses a significant challenge within the realm of logistics. Thus, diminishing fuel usage holds considerable promise for simultaneously lowering costs and mitigating the environmental pollutants that pose significant risks to human health. Fuel consumption is subject to various factors, encompassing the distance traveled and the cumulative weight of the vehicle, which encompasses both the weight of the empty vehicle and the cargo it transports. This work is an extension of [
17] and intends to identify the potential research gaps in the existing literature concerning uncertainty in pick-up and delivery loads while optimizing fuel consumption considering environmental sustainability.
In light of these considerations, this research delves into the challenge of reducing energy consumption within the context of the VRPSDP. In order to reflect real-world situations, both pick-up and delivery customers’ quantities are considered to be uncertain and are represented through triangular fuzzy numbers. To facilitate the handling of fuzzy calculations and the ranking of fuzzy numbers, the concept of total integral value is adopted. An optimization strategy is developed based on a genetic algorithm (GA), which integrates fuzzy principles related to pick-up and delivery quantities. Through experimental tests, the study demonstrates the efficacy and efficiency of the proposed optimization model, while also exploring how uncertainties in customer quantities affect the overall fuzzy payloads.
The literature review reveals that it is the first time that the VRP with fuzzy pick-up and delivery payloads is conducted in the context of fuel consumption minimization. In this regard, the main innovations and contribution of this work are summarized as the following:
The traditional VRPSDP aims at the minimization of the travel cost. In this work, the optimization criterion is the energy consumption linked with fuel consumption, which is a critical concern in transportation and distribution logistics.
In contrast to the VRPSDP, this methodology treats payloads as fuzzy rather than fixed deterministic, aiming to encapsulate the inherent uncertainty present in real-world situations. The optimization solution method integrates fuzzy concepts based on the total integral value. The study investigated the impact of the uncertainty in customers’ quantities on the optimum route.
3. The Developed Genetic Algorithm
The VRPSDP is an NP-hard problem; thus, traditional methods can hardly provide a solution. Consequently, researchers have shifted their attention towards intelligent algorithms, such as evolutionary algorithms. Genetic algorithms (GAs) [
21] are a particular class of evolutionary algorithms inspired by natural selection and genetic principles, and they find extensive utility in addressing diverse real-world problems involving combinatorial optimization and searching. Genetic algorithms are proven to be effective tools for finding near-optimal solutions to complex combinatorial optimization problems. Since no benchmarks are available for comparison in the open literature, the provided results are the optimal solutions found applying the proposed optimization approach. Nevertheless, there is no guarantee that they are the optimal ones. In this work, a special GA is developed that can handle fuzziness and is described in the following paragraphs.
Chromosome encoding: Each potential solution is expressed by a chromosome and comprises a permutation of
n integers. Each integer corresponds to a specific customer, and the order of these integers reflects the sequence in which the customers are served. An illustration of a potential chromosome for a scenario involving 10 customers is provided below:
This represents a possible sequence for serving the customers. Nevertheless, the ultimate tours, representing the total number of vehicles used, are determined by the capacity constraint. As a result, the tours are not defined through the construction of the chromosome, but directly from the constraint. Moreover, the depot (being the starting and the ending point for each tour) is not included as a separate integer in the chromosome, but its location is considered for the calculations.
Fitness function: The fitness function evaluates the quality of a potential solution and assigns a fitness score as follows:
Genetic operators: Roulette wheel selection is applied for
Reproduction, where each individual’s fitness value determines their chance of being selected. Thus, chromosomes with higher fitness scores are more likely to be chosen.
Crossover generates new offspring by exchanging the genetic material of the parents. In this work, the order crossover (OX) [
22] is used considering the crossover rate.
Mutation introduces random changes into the genetic material of the chromosomes, allowing for the exploration of new solutions. In this work, the inversion ([
22]) is applied considering the mutation rate.
4. Simulation Results
The computational results provided by the developed GA are presented and discussed in this section. The simulations were implemented with MATLAB R2020a using a PC with a 3.5 GHz processor. Experimental tests were conducted by applying this proposed optimization approach to some benchmark instances to assess the performance of the developed optimization algorithm. Since no benchmarks are available for comparison in the open literature, the benchmark instances proposed by ([
23]) are modified to generate the VRPSDP benchmark instances (for available data, see
http://vrp.galgos.inf.puc-rio.br/index.php/en/ accessed on 5 September 2023).
For the case of fuzzy pick-up and delivery quantities, we create the VRPSPD instances as follows. Let the delivery quantity, , of each customer remain the same as its original quantity in the CVRP instance, let the pick-up of the first customer be and let the pick-up of the any other customer i be . Concerning the maximum available capacity, we considered that it is half of the original one. It is also considered that half of the maximum available capacity is full of goods.
Moreover, the crisp pick-up and delivery quantities are converted into triangular fuzzy sets as follows: Each crisp quantity is fuzzified considering that is equal to this crisp quantity. The two extreme values of the support are computed as follows: and , setting equal to 0.85 and equal to 1.3. Regarding the GA control parameters, the following values are determined after extensive experimentation: size of population = 100; maximum generations = 1500; crossover rate = 0.8; and mutation rate = 0.09. Considering a moderate decision maker, the index of in Equation (2) is set to 0.5.
Consequently, 11 distinct benchmark instances in total were evaluated, encompassing varying numbers of customers ranging from 22 to 101. These instances also featured diverse fuzzy pick-up and delivery quantities and maximum available capacity specifications. For each of these test instances, the genetic algorithm (GA) was executed 10 times, and the obtained solution among these runs was chosen.
Table 1 summarizes the outcomes obtained through the application of the developed genetic algorithm (GA) combined with fuzzy logic. It is worth noting that although the fuel consumption is a fuzzy variable, a single value is presented in
Table 1 based on the computation through the integral value. Given that the benchmark solutions are available for the capacitated vehicle routing Problem (CVRP), which is a deterministic problem featuring a single optimization criterion (traveled distance), it is important to note that optimal solutions are not readily available for the VRPSDP incorporating fuzzy pick-up and delivery quantities.
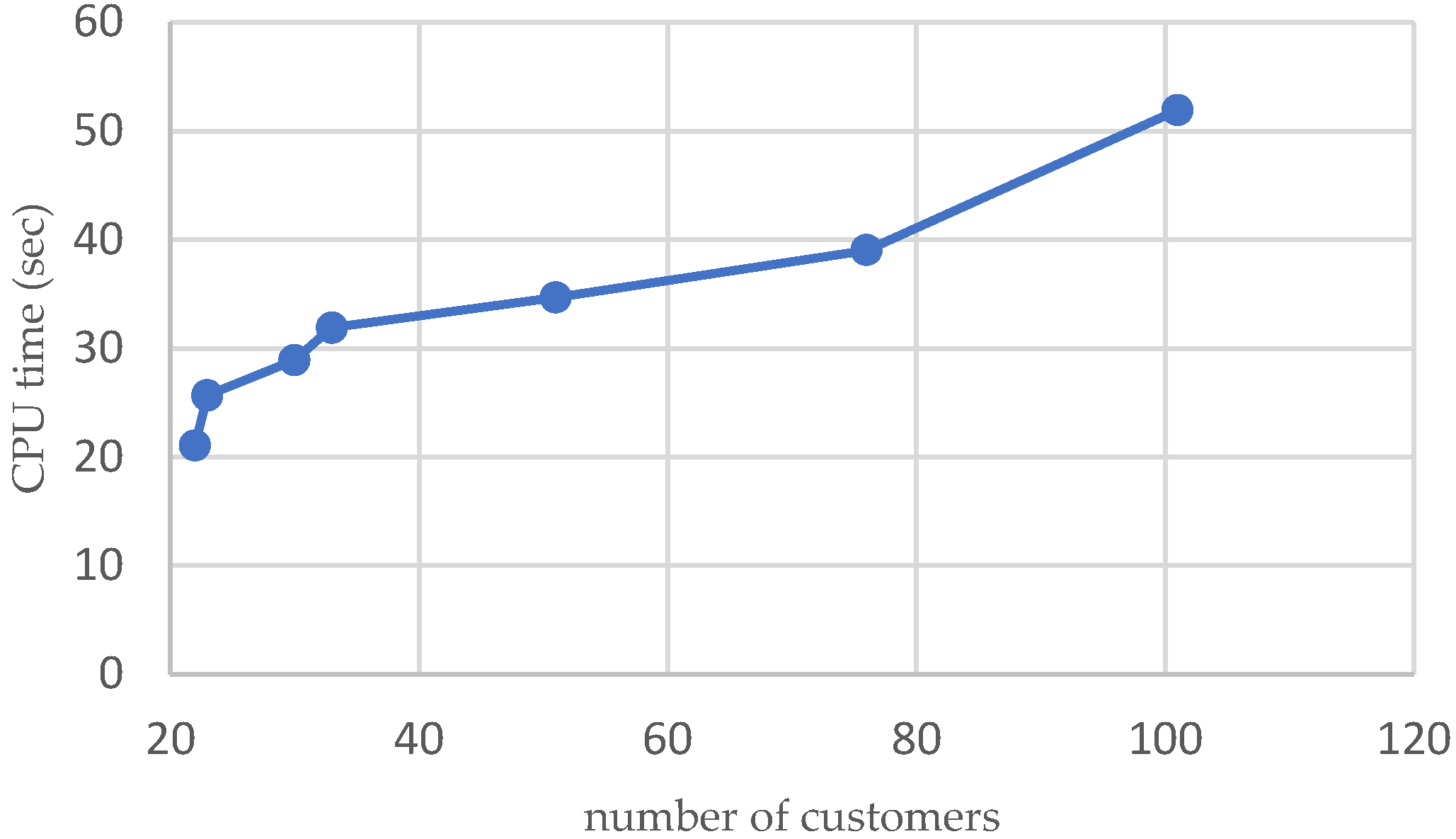
An interesting indication of the problem’s complexity is the variation in the calculation time versus the number of customers. Several experiments were conducted for different numbers of customers (22, 23, 30, 33, 51, 76, and 101). As illustrated in
Figure 2, the graphical representation underscores the relationship between computational time and task point density, revealing an almost linear progression of CPU utilization as the number of task points increases.
With the aim to visualize the results, the experiment for the case of 1 central depot and 21 customers (E-n22-k4) is conducted having a maximum available capacity of
. The provided solution for this benchmark instance includes four tours shown in
Figure 3; the tour of vehicle#1 includes four customers (blue line), the tour of vehicle#2 includes four customers (magenta line), the tour of vehicle#3 includes five customers (green line) and the tour of vehicle#4 includes seven customers (cyan line). In particular, the sequence that follows each vehicle while serving the customers is as follows:
Vehicle#1: depot → 10 → 8 → 1→ 17 → depot
Vehicle#2: depot → 20 → 16 → 15 → 18 → 14 → depot
Vehicle#3: depot → 6 → 5 → 2 → 4 → 3 → depot
Vehicle#4: depot → 21 → 19 → 11 → 13 → 12 → 7 → 9 → depot
This implies that each vehicle starts from the depot, serves a number of customers with fuzzy pick-up and delivery quantities, and returns to the depot. At the end of each tour, each vehicle is linked with a total fuzzy pick-up quantity and a total fuzzy delivery quantity, which are presented in
Table 2.
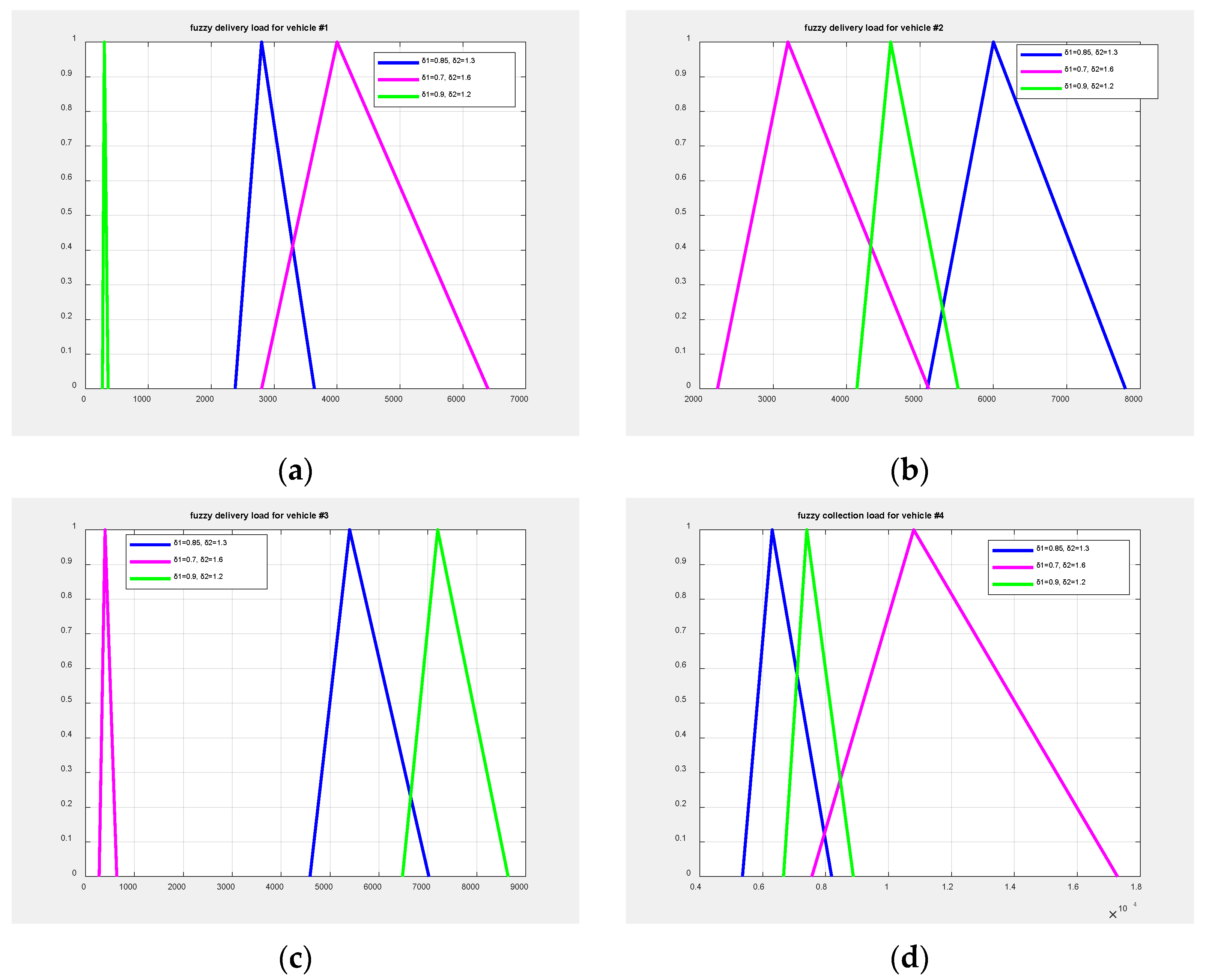
To examine the impact of uncertainty in customers’ pick-up and delivery quantities on the solution yielded by the GA, we modify the support width of the fuzzy pick-up and delivery quantities. Two test cases are conducted: and , corresponding to a wider and a narrower support, respectively. Obviously, a wider support (e.g., ) encompasses more uncertainty in the customers’ quantities, while a narrower support (e.g., ) decreases the uncertainty and leads towards the most plausible quantities.
The impact of uncertainty modifications is examined using the previously mentioned test instance, which involves 21 customers and 1 central depot. The outcomes pertaining to the total fuzzy pick-up and delivery payloads for each of the four vehicles are presented in
Figure 4a–d and
Figure 5a–d, respectively. As one can see from these figures, more uncertainty in customers’ pick-up quantities yields a wider support of the total fuzzy pick-up and delivery payload. On the contrary, reduced uncertainty in the quantities collected from customers (i.e., when
and
) leads to a more confined range (i.e., closer to the most likely value) for the total fuzzy payload.
Based on the outcomes of our experiments, we can deduce that the enlargement of the ranges associated with the fuzzy payloads is notably influenced by the increase in uncertainty in both pick-up and delivery quantities. On the contrary, when the uncertainty of pick-up and delivery quantities is decreased, the supports of the fuzzy payloads become narrower. As a general remark, as much as ambiguity in payloads is increased, uncertainty in solutions yielded is also increased; in other words, as much as solutions diverge from real situations, we are driven to more costly solutions.
5. Conclusions
This paper examines the VRPSPD involving fuzzy payloads, with a primary focus on minimizing fuel consumption. Fuel consumption is mainly affected by the load carried by the vehicles as they traverse their routes. To better represent real-world scenarios, the proposed model takes into account uncertain pick-up and delivery quantities for customers, expressed using TFNs. To address the computational complexity of this problem and arrive at a near-optimal solution, an optimization strategy based on genetic algorithms (GAs) is developed. This approach incorporates the concept of fuzziness using the integral value concept, enhancing its ability to handle fuzzy parameters effectively.
The effectiveness of the developed optimization model is validated through test instances from the existing literature, which have been adapted for use in the VRPSDP involving fuzzy pick-up and delivery quantities. To explore how uncertainties in the quantities collected and delivered by customers impact the solution yielded by the GA, we manipulate the level of uncertainty by adjusting the supports. The outcomes concerning the overall fuzzy pick-up and delivery payloads demonstrate that as the uncertainty regarding customer quantities increases, there is a corresponding increase in the uncertainty of the total fuzzy pick-up and delivery payloads.
This work makes a dual contribution. Firstly, the model developed here focuses on minimizing fuel consumption, acknowledging the critical need to reduce energy consumption, given the adverse environmental consequences of fuel use and the rising operational expenses. Secondly, the incorporation of fuzzy concepts to manage uncertainties in pick-up and delivery quantities enhances the representation of real-world scenarios
Further research will also be devoted to the real-world factors influencing fuel consumption, such as weather conditions, road slopes as well as traffic conditions on the roads. Another challenging issue is the study of the multi-objective VRPSDP with fuzzy pick-up and delivery quantities considering both the travelled distance and fuel consumption. Another great challenge is extending our model in order to address additional realistic issues such as traffic congestion on roads in real-life urban scenarios based on the work presented in [
24,
25,
26,
27]. In this context, the impact of road traffic conditions will be evaluated regarding fuel consumption.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}