1. Introduction
Reliable wireless communication is a critical enabler for the operation of mobile robotic platforms, particularly in dynamic and unpredictable environments. As the adoption of Internet of Robotic Things (IoRT) technologies accelerates, mobile robots increasingly rely on uninterrupted data exchange with edge devices and cloud infrastructures for real-time decision-making, navigation, monitoring, and control [
1]. However, the wireless network performance, specifically WiFi communication, is susceptible to various environmental factors and, notably, to the robot’s own motion dynamics. Previous research has mainly focused on static or quasi-static conditions when evaluating wireless network reliability for robotics applications. In real-world scenarios, mobile robots are rarely stationary. They navigate complex terrains, perform rapid maneuvers, rotate, and accelerate—all of which can affect the quality of the wireless connection [
2]. Changes in robot orientation (roll, pitch, yaw) and variations in translational speed can introduce challenges such as multipath fading, signal attenuation, increased latency, and data loss [
3]. These issues are particularly critical for autonomous systems where real-time data transmission is essential for maintaining operational safety, efficiency, and system integrity. WiFi networks, operating typically in the 2.4 GHz and 5 GHz bands, are known for their sensitivity to obstacles, reflection, and interference, making them less predictable in dynamic settings. Moreover, the movement of a robotic platform can change the relative alignment between the robot’s antennas and access points, potentially degrading signal quality. As robots accelerate or change their pose, variations in the Received Signal Strength Indicator (RSSI) can occur, leading to unstable network performance. Latency and packet loss can increase during fast turns, inclines, or high-speed traversal, which may delay or disrupt critical command and control signals. Understanding the relationship between robot dynamics and wireless communication quality is thus essential for the robust design of mobile robotic systems, especially for those relying on IoRT architectures [
4]. Identifying the key factors that influence WiFi network performance during motion enables researchers and engineers to develop adaptive communication strategies, optimize path planning, or implement redundant transmission mechanisms to mitigate the effects of connectivity degradation. This article presents an experimental study that quantifies how robot motion dynamics, including speed and orientation changes, impact WiFi communication performance. Using a quadruped mobile robot equipped with edge computing capabilities, various trajectories were executed within a controlled laboratory environment while continuously monitoring network parameters (RSSI, latency, packet loss) and kinematic data (forward velocity, roll, pitch, yaw). The findings provide valuable insights into how dynamic behavior affects wireless communication, offering guidance for future mobile IoRT system designs and highlighting the necessity of robust network adaptation mechanisms in real-world deployments.
2. Related Work
The relationship between wireless communication performance and the dynamic behavior of mobile robotic platforms has become an increasingly important area of investigation. In particular, the sensitivity of WiFi networks to environmental changes and robot-induced motion has prompted numerous studies exploring how mobility patterns, orientation shifts, and trajectory complexity affect connectivity within IoRT systems. Prior work has addressed this interplay from various perspectives, including signal prediction, adaptive relay positioning, and the optimization of communication protocols. These challenges are especially relevant in the context of smart cities, where mobile robots are increasingly integrated into intelligent transportation systems, logistics, and infrastructure monitoring. Ensuring reliable wireless communication under dynamic conditions is therefore a key enabler of scalable and interoperable urban mobility solutions. One significant direction focuses on predicting link quality based on motion-related features. A study presented a machine learning model capable of forecasting link quality using parameters such as signal strength, distance, and robot mobility [
5]. Another approach used RSSI-based Kalman filtering to estimate signal quality along planned trajectories, accounting for antenna orientation and localization errors [
6]. In addition to prediction, several works explored adaptive positioning and relay strategies. One study proposed autonomous WiFi relay placement, where mobile robots adjust their position to maximize coverage using SLAM and sampling-based planning [
7]. Another system leveraged obstacle-aware positioning of mobile 5G base stations to maintain strong coverage in cluttered environments [
8]. The energetic implications of communication-driven mobility were analyzed in the context of robots serving as 6G relays. Experiments revealed that movement regimes significantly affect battery consumption, indicating a trade-off between connectivity and energy efficiency [
9]. When focusing on motion-induced communication degradation, one empirical analysis demonstrated that robot heading and speed directly influence latency, packet loss, and throughput across common WiFi bands [
10]. This supports the hypothesis that robot motion dynamics are a non-negligible factor in real-time wireless performance. Further, signal-strength-based localization techniques were proposed for indoor positioning of mobile robots without the use of additional sensors [
11]. Complementary studies analyzed network Quality of Service (QoS) in 5G-enabled delivery and service robots, emphasizing the impact of network latency on task completion time and control fidelity [
12,
13]. Such considerations are vital in urban deployments, where mobile robotic agents are expected to operate seamlessly within heterogeneous, cloud-connected environments under variable wireless conditions. A separate body of work investigated lightweight communication protocols, particularly MQTT, which has proven effective in reducing computational overhead during multi-robot synchronization and teleoperation [
14,
15]. These implementations underscore the role of protocol efficiency in maintaining low-latency control loops over potentially unstable wireless links. In our study, we specifically focus on legged robotic systems—particularly quadrupeds—which offer several advantages over traditional wheeled platforms. These include superior adaptability to uneven or unstructured terrain, enhanced maneuverability in confined or obstacle-rich environments [
16]. The inherently dynamic motion of quadruped robots—characterized by continuous adjustments in body posture and frequent multi-axis rotations—provides a more demanding and realistic test case for evaluating the robustness of wireless communication under mobility-induced stress. While these approaches provide valuable insights into individual aspects of robot communication, most of them isolate either the network layer or the motion model. In contrast, our study offers a combined perspective, correlating physical robot behavior (speed, orientation) with measurable wireless metrics (RSSI, latency, packet loss) in a controlled yet dynamic testbed. This integrated approach contributes to the development of communication-aware mobile systems capable of supporting smart mobility services and data-driven decision-making within the broader smart city framework. In addition to empirical and protocol-level research, several works have addressed communication-aware control and planning strategies. Formal motion planning methods based on STL/STREL logic have been proposed to ensure QoS in networked robotic systems, enabling trajectory generation that inherently respects communication constraints [
17]. Similarly, teleoperation techniques using leaky coaxial cables have been explored to guarantee a minimum bandwidth for reliable control, with evaluations focusing on jitter and transmission drops [
18]. From a systems perspective, stochastic network behaviors have also been shown to degrade Quality of Control (QoC), underscoring the need for robust network-aware control architectures [
19]. Low-latency communication remains essential in time-critical robotic applications. Studies on service and soccer robots have demonstrated that network latency must be consistently below strict thresholds (e.g., 5 ms) to enable real-time actuation and telemetry [
13,
20]. These findings reinforce the importance of maintaining consistent link speed and minimal jitter in wireless robot deployments. Finally, various MQTT-based implementations have been investigated beyond industrial contexts. Wireless edge controllers [
21] have been successfully applied in robotics education to enable reliable performance across varying bandwidths [
22], and master–slave communication frameworks have been designed using MQTT to synchronize multiple robots efficiently with minimal communication errors. These studies illustrate the flexibility and scalability of lightweight protocols in a broad range of robotic scenarios, including those involving constrained or shared network infrastructures.
3. Wireless Communication for Urban Mobile Robots
Wireless communication technologies are essential for mobile robotics, particularly in latency-sensitive and dynamic environments. WiFi remains a widely used and cost-effective option but is prone to degradation during motion due to antenna misalignment, occlusion, and multipath interference, leading to higher latency and reduced reliability [
23]. In contrast, 5G networks offer ultra-reliable low-latency communication, greater bandwidth, and more stable performance in highly mobile or electromagnetically complex settings [
24]. The use of WiFi and 5G in mobile robotics represents a critical pathway for ensuring fast and reliable communication, especially in industrial and mission-critical scenarios. Studies have shown that 5G provides significantly lower latency and greater transmission stability than WiFi, which is crucial for remote operation of robotic systems [
25]. In autonomous mobile robotics, handovers between 5G cells have been demonstrated to occur seamlessly and without delay, supporting the use of private 5G campus networks for time-sensitive operations [
26]. However, WiFi retains advantages in environments with poor coverage, such as tunnels, where mesh networking can help maintain signal availability [
27]. Hybrid architectures that dynamically switch between 5G and WiFi based on signal conditions further enable flexible and adaptive robotic control. Moreover, 5G enables features such as beamforming, network slicing, and mobile edge computing, which support offloading tasks like motion planning or sensor fusion to cloud infrastructure. Experimental studies confirm that cloud-based planners over 5G achieve navigation and docking performance comparable to onboard systems, with less than 1.5% increase in execution time and minimal accuracy loss [
28]. Integrated communication–localization frameworks such as SLARM further enhance situational awareness and signal-aware path planning in complex environments. In this study, WiFi and 5G technologies were experimentally evaluated under identical robotic motion scenarios, enabling direct comparison of their communication performance in urban mobility contexts.
4. Methodology
This section outlines the methodology used to evaluate how motion dynamics of a mobile robotic platform influence WiFi communication performance. The experimental setup was designed to simulate realistic robot movements in a controlled indoor environment while continuously monitoring key network parameters, see
Figure 1. The following subsections describe the robotic platform and measurement tools, the experimental environment and motion scenarios, and the procedures used to collect, synchronize, and validate the data.
4.1. Robotic Platform Description
The robotic platform used in this study is the Unitree GO1 [
29] (see
Figure 2), a quadruped mobile robot designed for agile locomotion and research in dynamic environments. The GO1 is equipped with onboard sensors such as an inertial measurement unit (IMU), joint encoders, and vision modules, providing high-resolution feedback on its motion state and posture. Quadruped robots are currently gaining increasing attention due to their superior versatility in traversing diverse and unstructured terrains, which makes them highly suitable for deployment in complex real-world environments. The choice of a legged platform over wheeled or simulated alternatives was motivated by the need to capture realistic motion dynamics—such as gait-induced vibration, rapid directional changes, and varying body posture—that have a significant impact on wireless communication quality. Moreover, the GO1 offers an integrated, self-contained system for both motion and data acquisition, enabling consistent and reproducible measurements essential for the study’s objectives.
To enable real-time data acquisition and processing, the robot was fitted with an NVIDIA Jetson Xavier NX [
30] edge computing module mounted on its body (see
Figure 3). This device handled local logging and synchronization of motion data with wireless communication parameters, including Received Signal Strength Indicator (RSSI), latency, and packet loss. Communication was established using the Jetson’s integrated dual-band WiFi module (2.4 GHz and 5 GHz, IEEE 802.11) [
31], ensuring compatibility with the laboratory’s wireless infrastructure. To mitigate potential signal degradation due to body shadowing and to enhance robustness against orientation-induced performance variations, this setup was augmented with a Penta-band Cabled Embedded PCB Adhesive Mount Antenna, located on top of the edge system that the robot carries.
Unlike autonomous deployments, in this experiment, the robot was manually guided by a human operator along predefined motion trajectories within a controlled laboratory environment. This approach allowed precise adherence to the desired paths and repeatability across different test runs. The operator followed visual markers to trace paths that included linear motion, rotations, halts, and varying speeds, simulating realistic robot behavior while ensuring control over movement consistency. The combination of the Unitree GO1 and Jetson Xavier NX provided a testbed for observing how robot movement affects wireless network quality in real time. Manual operation also ensured safety and repeatability while preserving the dynamic characteristics essential for the study.
4.2. Experimental Environment and Motion Scenarios
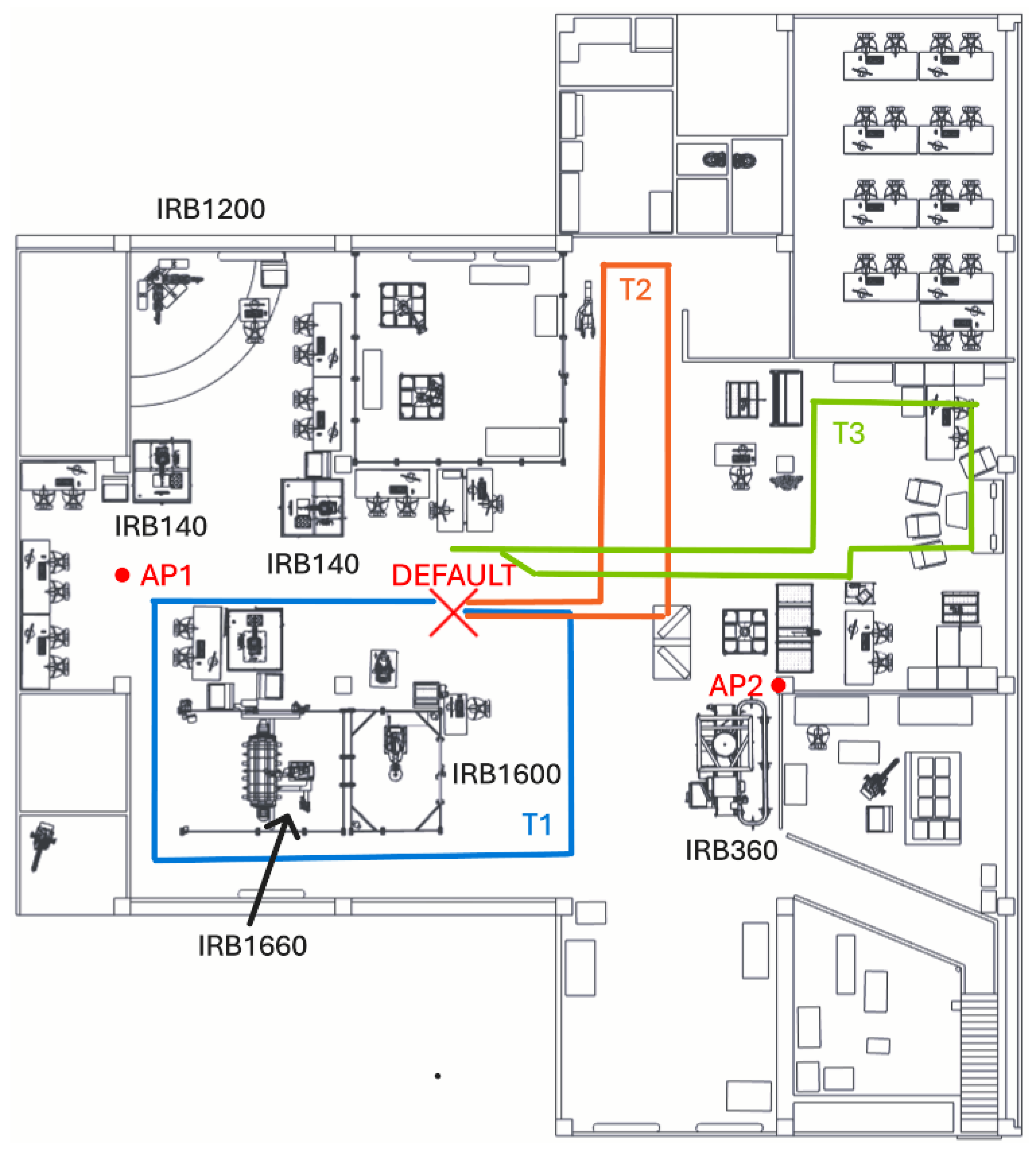
The measurement environment is located within the premises of the Department of Robotics and consists of an open space measuring approximately 30.5 × 27.3 m. This area is primarily intended for education and research in industrial and collaborative robotic systems (see
Figure 4). It includes several workstations equipped with industrial and collaborative robots from various manufacturers, workbenches, educational zones, and additional equipment such as safety barriers, protective elements, and other laboratory apparatus. The floor is smooth and made of concrete, providing a stable and uniform surface for robot locomotion. Windows are present only along the right-hand wall, which minimizes variability in natural light and external electromagnetic influence. Industrial robot workstations are enclosed in wire mesh safety cages, ensuring operator safety and reducing physical interference with signal propagation. Several computer workstations are also located within the space; however, all computers were powered off during testing to avoid unintended electromagnetic emissions.
In addition to these elements, environmental features—such as the supporting brick columns distributed throughout the space—can also influence wireless signal propagation. The laboratory is covered by a WiFi network supporting both 2.4 GHz and 5 GHz frequency bands. Two access points are installed within the area: one is colocated with a 5G access point, which also covers the laboratory and was strategically positioned for the purpose of measurement and future comparisons with 5G connectivity. The second access point is mounted at the same height on the opposite wall, ensuring more even signal distribution across the area. During the experiments, various operational conditions were analyzed, including tests with both routers active as well as scenarios where one was deactivated. This experimental design was chosen to closely simulate real industrial environments, where random interference factors may influence the quality of wireless communication. Potential sources of interference were identified, primarily including industrial and collaborative robots, electrical equipment, and nearby WiFi networks. To ensure sufficient coverage of different operating states, measurements were conducted at various times of day. This allowed for analysis of interference variability and its impact on the network’s transmission characteristics. Throughout the entire measurement process, ambient temperature conditions remained stable with minimal fluctuations. No significant impact of temperature variation on wireless signal quality was observed, confirming the consistency of the experimental setup.
The 5G experimental network used in this study was implemented as a private, non-commercial setup configured for research purposes. The system operated in band n78, with a frequency assignment of 3460–3520 MHz and a bandwidth of 60 MHz. The network was based on a single macro radio unit (Radio 4408), and the NR-ARFCN. Communication followed a TDD pattern of 3 (DDDSUDDSUU), using sub-pattern 2 (10:2:2), and the Tracking Area Code was 3010.
The experiments were conducted in a dedicated laboratory setting designed for repeatable measurements. While electromagnetic interference was present, its influence was actively quantified through separate measurements. Other potential frequency interference was minimized within the experimental area. Furthermore, occlusion events were kept minimal and controlled by an operator overseeing the robot’s predefined trajectories. This meticulous approach ensured reproducible conditions for studying the impact of robot motion dynamics on wireless communication.
4.3. Measurement Setup and Data Synchronization
Building upon the described robotic platform and environment, the data acquisition setup was designed to ensure seamless integration of motion and network performance monitoring during the robot’s operation. The system architecture enabled parallel logging of wireless communication parameters and kinematic data with a focus on temporal alignment and minimal external dependencies.
Wireless performance was evaluated based on three primary metrics: Received Signal Strength Indicator (RSSI), one-trip latency, and packet loss rate. These parameters were sampled at regular intervals using a custom Python-based monitoring script running on the robot’s onboard edge computing unit. The script utilized native Linux tools such as iwconfig, iw, and iwgetid via Python’s subprocess module, extracting relevant values through pattern matching with regular expressions. RSSI was retrieved either in dBm or as a relative signal level (see Algorithm 1). In addition to local monitoring, latency was quantified in the cloud by comparing timestamps assigned to each outgoing MQTT packet at the edge device with the time of its reception in the cloud platform. This provided a precise one-trip delay measurement under real transmission conditions, inherently encompassing the full path from the edge to the cloud endpoint. A similar approach was used to estimate packet loss. Each outgoing message from the edge device included metadata specifying the expected payload size. Upon arrival in the cloud, the packet was re-evaluated, and any discrepancies between the sent and received sizes were recorded. This enabled the detection of both partial and complete data loss. Such dual-point measurement—combining edge and cloud-level observations—allowed for detailed insight into the behavior of the network path and its responsiveness under varying motion dynamics. Additional metrics included channel frequency, transmission bitrate, SSID, and the MAC address of the connected access point. The implementation was lightweight, resilient to data gaps, and optimized for real-time operation with minimal system overhead.
| Algorithm 1 Retrieve WiFi RSSI value. |
- 1:
procedure GetWifiRSSI( interface← "wlan0") ▹Input: WiFi interface - 2:
Try - 3:
result ← Execute iwconfig interface - 4:
match_dBm ← RegexSearch "Signal level=(-?\d+) dBm" in result.stdout - 5:
match_relative ← RegexSearch "Signal level=(\d+)/(\d+)" in result.stdout - 6:
if match_dBm is found then - 7:
return Integer(match_dBm.group(1)) ▹ Output: RSSI in dBm - 8:
else if match_relative is found then - 9:
signal_level ← Integer(match_relative.group(1)) - 10:
max_signal ← Integer(match_relative.group(2)) - 11:
rssi ← (signal_level / max_signal) * 100 - 12:
return rssi ▹ Output: RSSI as percentage - 13:
else - 14:
Print "Error: Failed to retrieve RSSI value." - 15:
return None ▹ Output: Retrieval failed - 16:
end if - 17:
Catch Exception e - 18:
Print "Error: " + e - 19:
return None - 20:
end procedure
|
To capture the influence of robot motion on communication quality, the network metrics were synchronized with data from the robot’s internal motion sensors. This included information about translational velocity, orientation, and turn dynamics (see
Figure 5), all of which were critical for correlating mobility patterns with signal fluctuations or disruptions. For time-stamping critical for credible latency analysis, both the robot’s onboard edge computing unit and the cloud platform are standardly synchronized with internet time servers, utilizing the Network Time Protocol (NTP). Time-stamping of all data streams was handled through a unified logging framework, ensuring that wireless and motion data could be matched with sub-second resolution during post-processing.
Measurements were conducted wirelessly via the robot’s active connection to one of the two installed access points. The operating band (2.4 GHz or 5 GHz) was varied between runs to evaluate differences in signal behavior across frequency ranges. Throughout all experiments, no external logging infrastructure was used; all data was recorded directly on the robot’s onboard system. This autonomous approach reduced latency, eliminated synchronization errors from remote systems, and reflected realistic robotic deployment scenarios where edge-based data processing is required.
Data transmission was implemented using the MQTT protocol, with the edge device acting as a publisher and the cloud platform as a subscriber. This lightweight, message-oriented communication model enabled asynchronous, low-latency data delivery and simplified the real-time integration of mobility and network performance logs. MQTT also ensured compatibility with resource-constrained systems and allowed data acquisition to be decoupled from the evaluation backend. For this purpose, the protocol was configured in its default asynchronous mode with QoS level 0, optimizing for speed and minimal overhead.
5. Experimental Procedure
The primary objective of the experimental procedure was to investigate how the motion dynamics of a quadruped robot affect the quality of wireless communication. Specifically, the study focused on analyzing how varying speeds, turning behaviors, and stop-and-go patterns influence key network parameters such as signal strength (RSSI), latency, and packet loss. To simulate realistic movement patterns that might occur during routine operation, three distinct trajectories were defined across the laboratory environment. These routes were designed to represent typical paths that an operator might follow during regular robotic deployment. Each trajectory was manually traversed by the Unitree GO1 robot under varying dynamic conditions. Motion scenarios included constant-speed linear movement, rotational maneuvers, and acceleration–deceleration transitions. This allowed for the assessment of how both smooth and abrupt movement patterns impact wireless performance. For each trajectory, multiple test runs—typically several dozen—were performed to obtain a large and statistically representative dataset. Additional standalone measurements were conducted to supplement the core dataset with edge-case observations. Although the core focus was on robot motion, the experiment also included two environmental conditions to provide comparative insight: one with active sources of electromagnetic interference (EMI), and one without. The EMI-free scenario served as a clean reference, while the EMI-present condition introduced typical industrial noise from active robots, machinery, and surrounding wireless networks. These secondary conditions were used to observe potential amplifying or masking effects of interference on the motion-related degradation of WiFi communication. All measurements were conducted at various times of day to capture natural variations in background interference. Each data collection cycle lasted several minutes and typically produced hundreds to thousands of wireless data packets, depending on the trajectory length and motion dynamics. Network metrics were time-synchronized with the robot’s internal motion data to enable correlation analysis. This methodology enabled the systematic study of motion-induced network degradation under conditions that closely resemble real-world robotic operations, while also allowing for controlled evaluation of external EMI as a secondary factor. In addition to WiFi, the experiment also included measurements conducted over a 5G network under the same conditions and on the same robotic platform. The 5G access point was colocated with one of the WiFi routers to ensure consistency in signal origin and propagation geometry. This allowed for a direct comparison between the performance of WiFi and 5G connectivity in identical mobility and interference scenarios. The inclusion of 5G data aims to provide a broader perspective on the suitability of different wireless technologies for use in mobile robotic systems operating in dynamic environments.
6. Results and Analysis
This section presents an in-depth analysis of the experimental observations obtained during the measurement campaign, with a particular emphasis on understanding the relationship between robot motion dynamics and wireless communication behavior. The investigation aims to explore how varying movement characteristics—especially changes in speed and orientation—influence critical communication metrics such as signal strength, latency, and data loss.
The analysis proceeds by correlating motion parameters, including translational velocity and rotational angles (roll, pitch, yaw), with network performance indicators. These parameters are assessed in a synchronized framework that enables a detailed examination of cause–effect patterns between the robot’s physical behavior and fluctuations in the wireless link quality. A series of movement scenarios, designed to emulate real-world conditions, form the basis for exploring how both smooth and abrupt motion transitions affect communication stability.
Rather than focusing on static performance metrics, this chapter adopts a dynamic perspective, analyzing the temporal and spatial variability of network parameters in the context of mobile robotic operation. Particular attention is given to identifying motion-induced conditions that may lead to latency increases or temporary disruptions in data transmission. Additionally, the analysis considers how different types of movement contribute to communication challenges, such as antenna misalignment, multipath effects, and signal occlusion.
6.1. WiFi Network Behavior Under Nominal Robot Motion
As shown in the
Table 1, the average RSSI value measured during the experiments was
, with a standard deviation of
, indicating a generally strong signal with moderate variability (ranging from
to
). The recorded bandwidth exhibited significant fluctuation, with a mean value of
and a standard deviation of
, spanning from
to
. This variability may be attributed to the robot’s dynamic movement during the measurement cycles, particularly changes in orientation and velocity.
The connection frequency averaged , which was caused by operation across two standard WiFi frequency bands and suggests dynamic band switching during communication, likely triggered by fluctuations in signal quality along the robot’s trajectory. The average size of received data packets was , compared to the expected average message size of , pointing to partial losses or fragmentation during transmission.
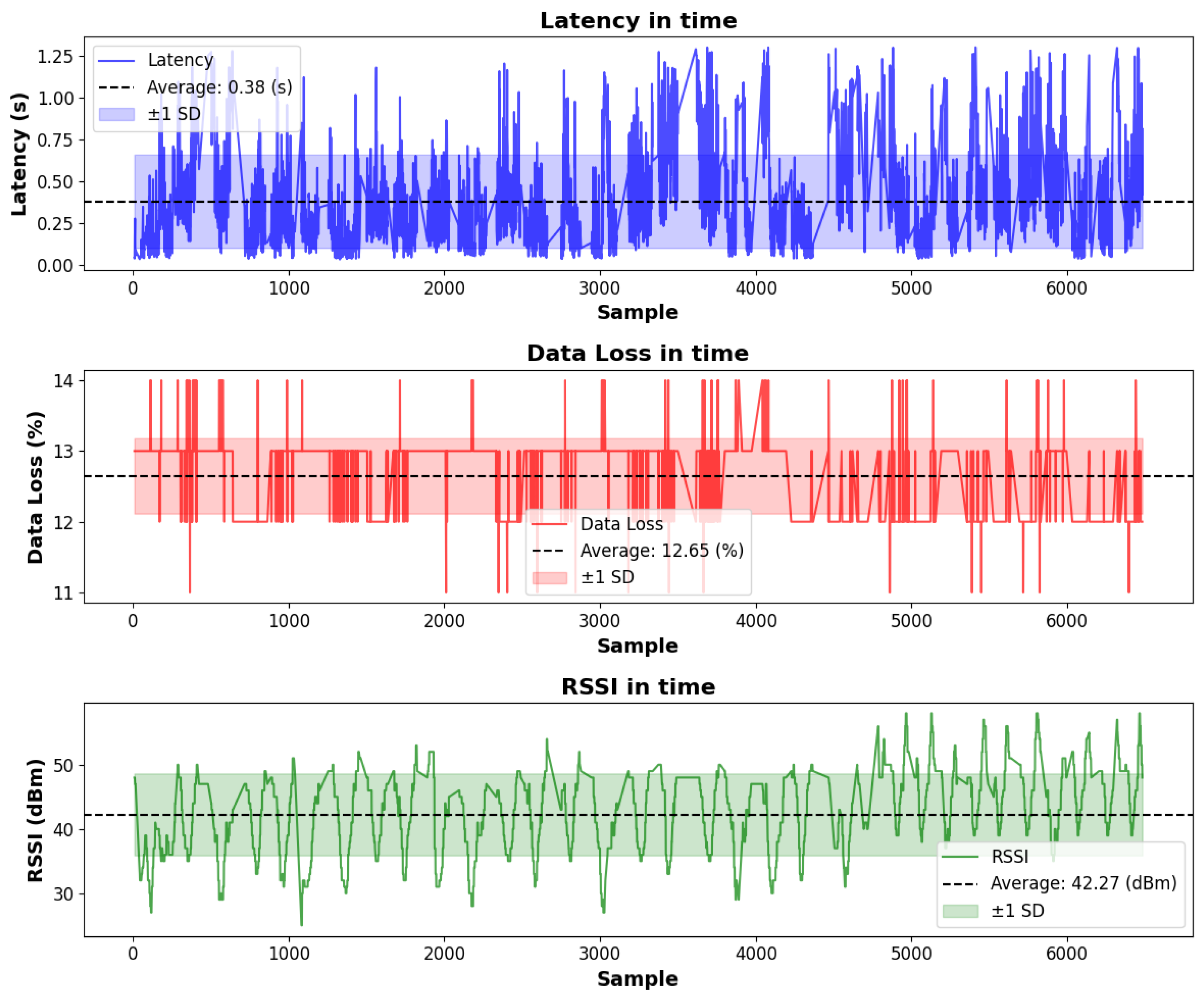
The average latency was relatively high at
, with peak values reaching up to
(see
Figure 6). Such delays could negatively affect the robot’s real-time responsiveness in interactive or control-intensive applications. Additionally, the average packet loss rate was
, further indicating limitations in communication reliability under dynamic conditions.
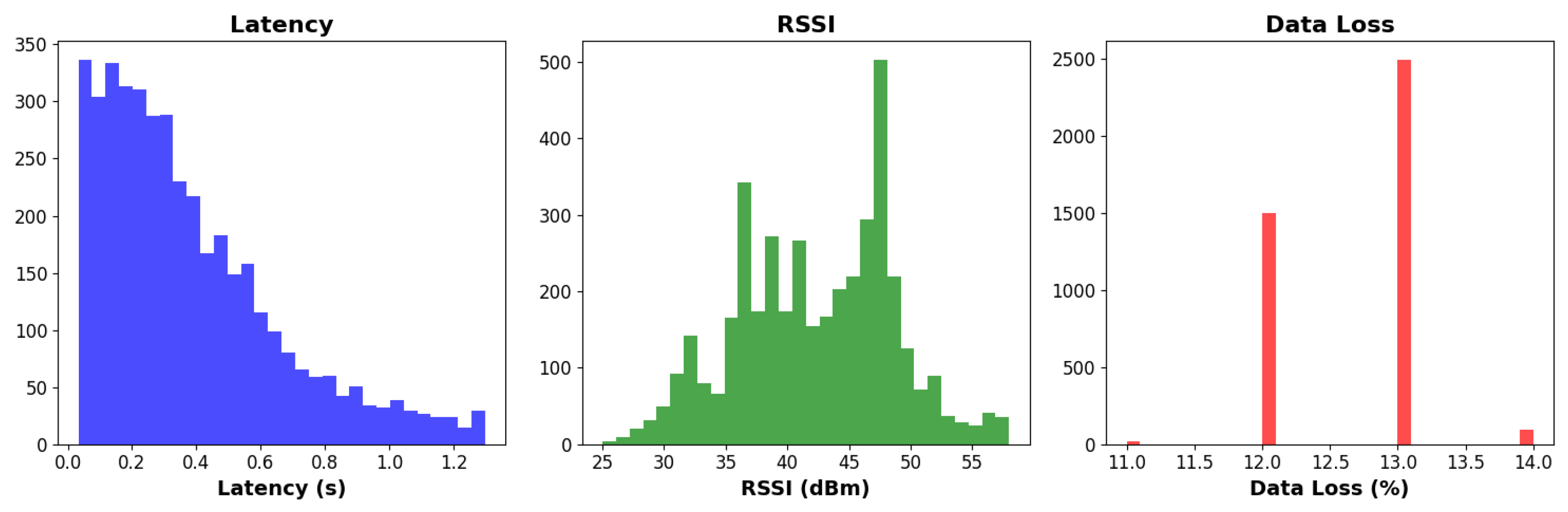
As illustrated by the histograms in
Figure 7, most of the measured values cluster around the expected means, suggesting that extreme deviations were relatively rare and likely situational. During these measurements, the robot maintained an average forward speed of
(maximum
), which corresponds to stable, low-speed movement. Given that the robot is capable of reaching speeds up to
, the test conditions favored consistent and controlled motion. The lateral and vertical velocities were negligible (near zero), indicating minimal deviation in those movement axes.
The robot’s roll and pitch orientations had very low average values (roll:
, pitch:
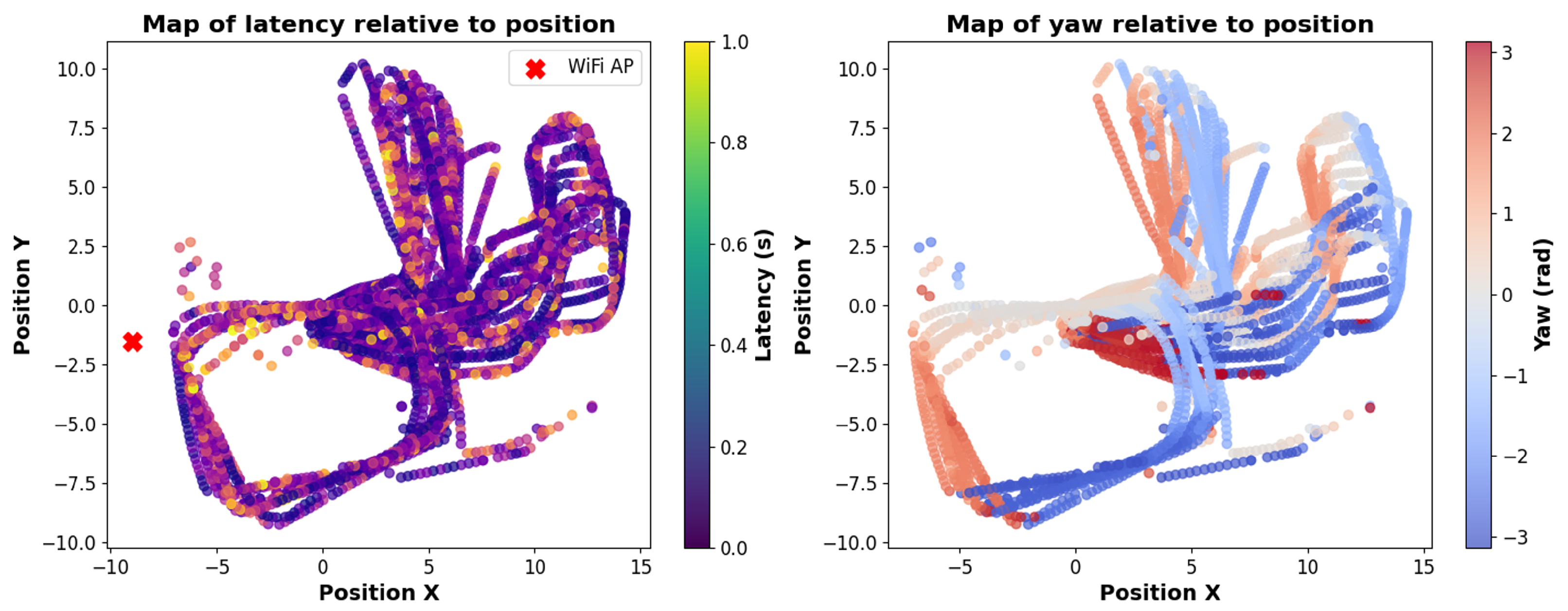
) and minimal variance, confirming high platform stability during motion. These values suggest a negligible influence of roll and pitch on communication quality. In contrast, the yaw orientation (see
Figure 8) averaged
with a high standard deviation of
, spanning nearly the full
range. This indicates frequent directional changes, such as rotations or turning maneuvers, as visualized in
Figure 8. Yaw, which represents the robot’s rotation around its vertical axis (see
Figure 5), plays a significant role in modifying antenna orientation relative to the access point. This behavior likely contributes to bandwidth variability and may also lead to temporary communication blind spots, especially when the antenna becomes misaligned due to sudden turns or orientation shifts.
A visual correlation between yaw orientation and increased latency can be observed across several trajectory segments. The left heatmap from
Figure 8 illustrates network latency in relation to the robot’s position. The color scale represents latency values (in seconds) recorded throughout the robot’s trajectories, ranging from low latency (dark purple) to high latency (yellow). The red marker indicates the position of the WiFi access point (AP). The right heatmap visualizes the robot’s yaw angle over space. Color represents orientation in radians, ranging from
(blue) to
(red), corresponding to the robot’s heading during motion. This visualization highlights areas with frequent directional changes and potential orientation-induced variability in wireless communication.
6.2. Impact of Motion Behavior on Latency Patterns
As the robot moves, its orientation, speed, and dynamic changes in motion can directly influence the latency between the robot and the cloud system. This subsection therefore analyzes specific aspects of the robot’s movement and their impact on communication delay.
From
Figure 9, it is evident that at lower speeds, the relationship between latency and velocity appears to be very weak, although it still shows a slightly increasing trend. This suggests that latency may grow marginally as the robot’s speed increases. Once the robot reaches speeds in the range of 0.5–1.0 m/s, a greater spread in the data becomes apparent, while the regression line continues to indicate a weak upward trend in latency. However, this increase remains subtle and does not demonstrate a clear causal effect of speed on latency. Consequently, although high-speed data (1.0+ m/s) was collected, its lower natural occurrence in the experimental conditions results in increased data sparsity and model variance, which limits the reliability of interpreting the latency trend in this velocity range.
Furthermore,
Figure 10 shows that the pitch angle exhibits a very shallow regression slope, indicating a weak and insignificant relationship between pitch and network latency. In most cases, pitch remains relatively stable, even at higher latency values, suggesting low sensitivity to communication delay. However, at higher speeds (0.5+ m/s), a greater density of data points can be observed, indicating increased variability in pitch values likely caused by dynamic changes in the robot’s movement, particularly during phases of acceleration and deceleration. A similar trend can be observed for roll, which displays a very shallow regression slope, indicating that the robot’s lateral tilt has minimal influence on network latency. Although data dispersion slightly increases with speed, the linear trend remains nearly flat, reinforcing the weak dependency between roll dynamics and communication delay.
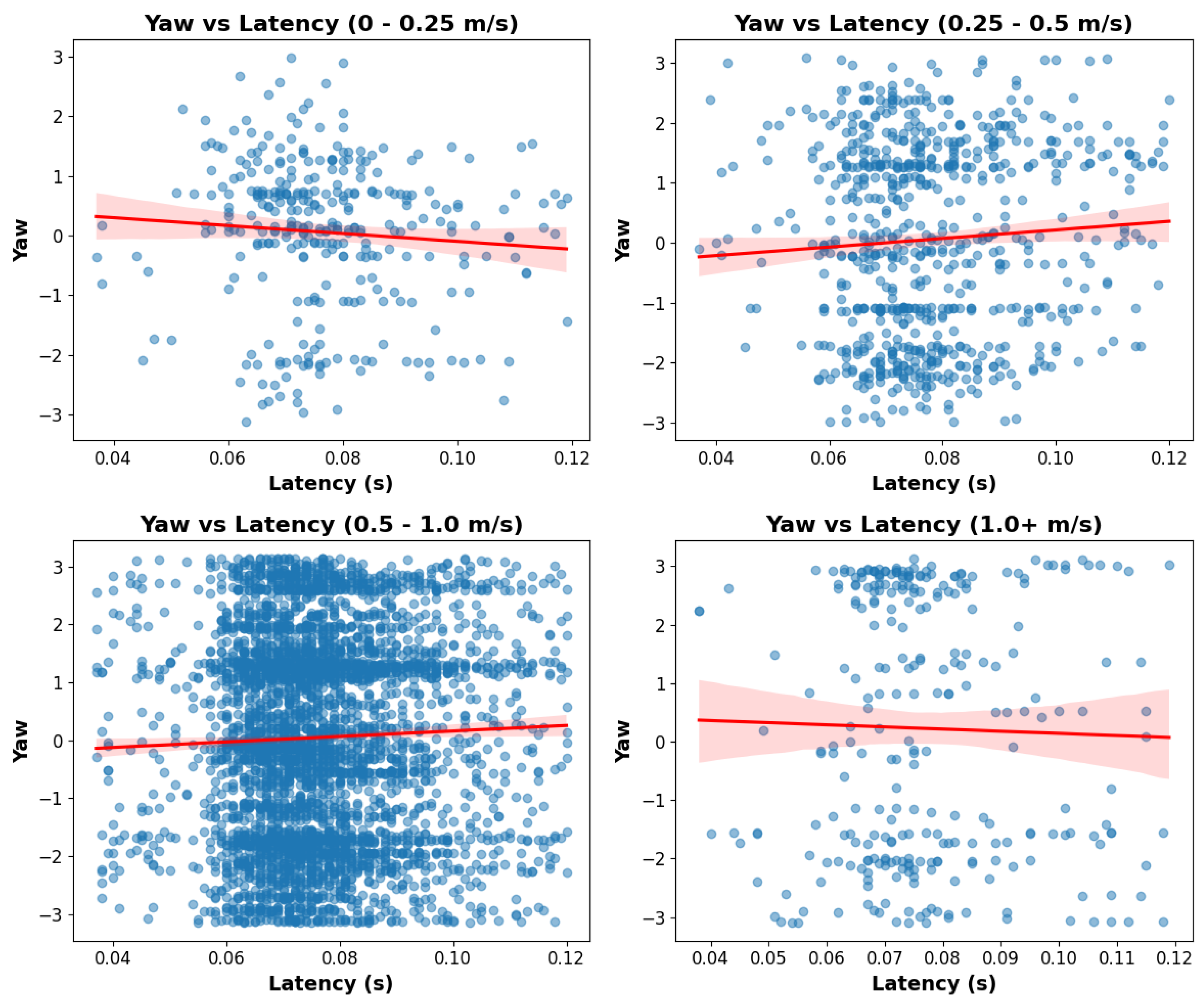
Figure 11 shows a clear upward trend between yaw and latency, especially within the 0.25–0.5 m/s velocity range. This indicates that directional changes during moderate-speed motion contribute to increased communication delay. At higher velocities, this relationship becomes less apparent, likely because the robot performs fewer rotational maneuvers and follows straighter paths, which reduces the influence of yaw on latency.
6.3. Analysis of 5G Connectivity in Robotic Operation
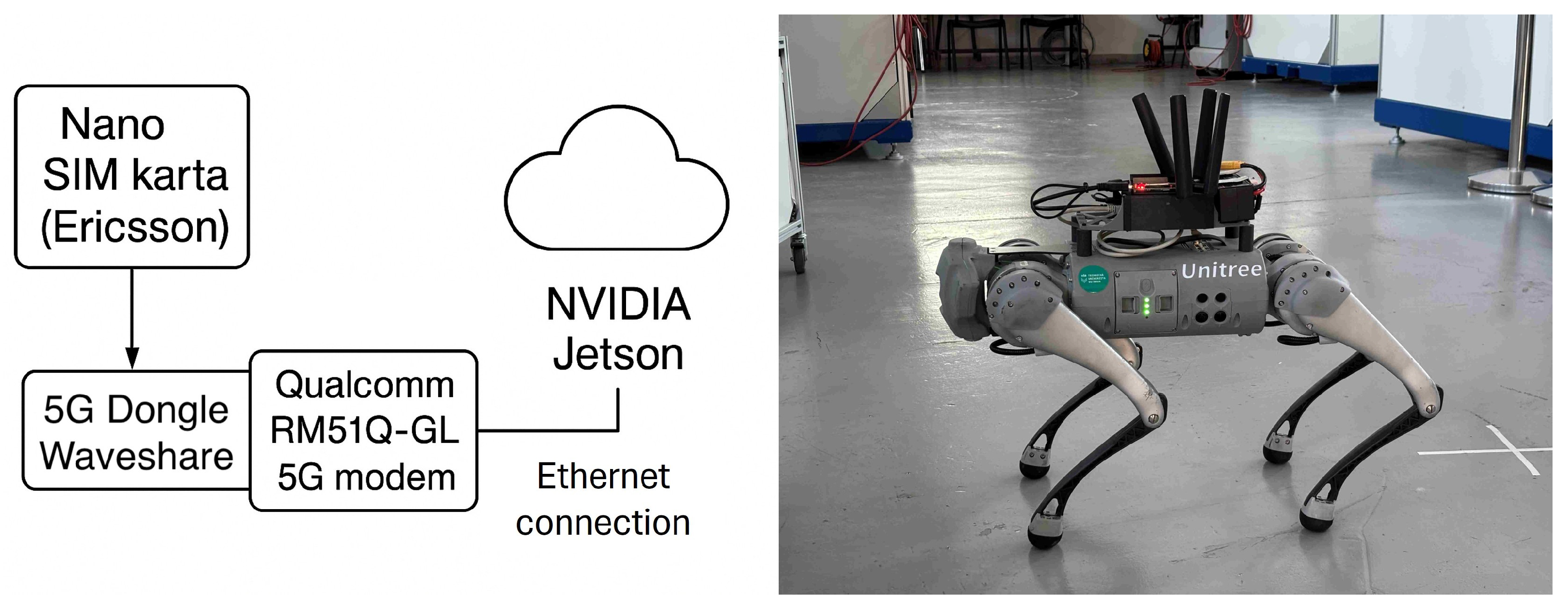
To enable a direct comparison with the previous WiFi-based experiment, 5G measurements were conducted using the same mobile robotic platform. The core hardware setup remained unchanged, including the computing unit, power system, and drive components of the robot. For the purposes of 5G connectivity testing, however, the setup was extended with two additional components (see
Figure 12).
The first addition was a Waveshare 5G dongle, providing the physical interface for connecting to a fifth-generation mobile network. The second component was a Queltec RM510Q-GL 5G modem [
32], connected via USB to the Jetson unit. This modem supports a broad range of both NSA (non-standalone) and SA (standalone) 5G bands, allowing flexible deployment under varying network conditions. This enhanced configuration enables evaluation of 5G connectivity under real motion conditions, while all other components remain consistent with the previous WiFi-based setup. This consistency ensures that the results can be directly compared, highlighting performance differences between WiFi and 5G under equivalent experimental conditions.
The results presented in
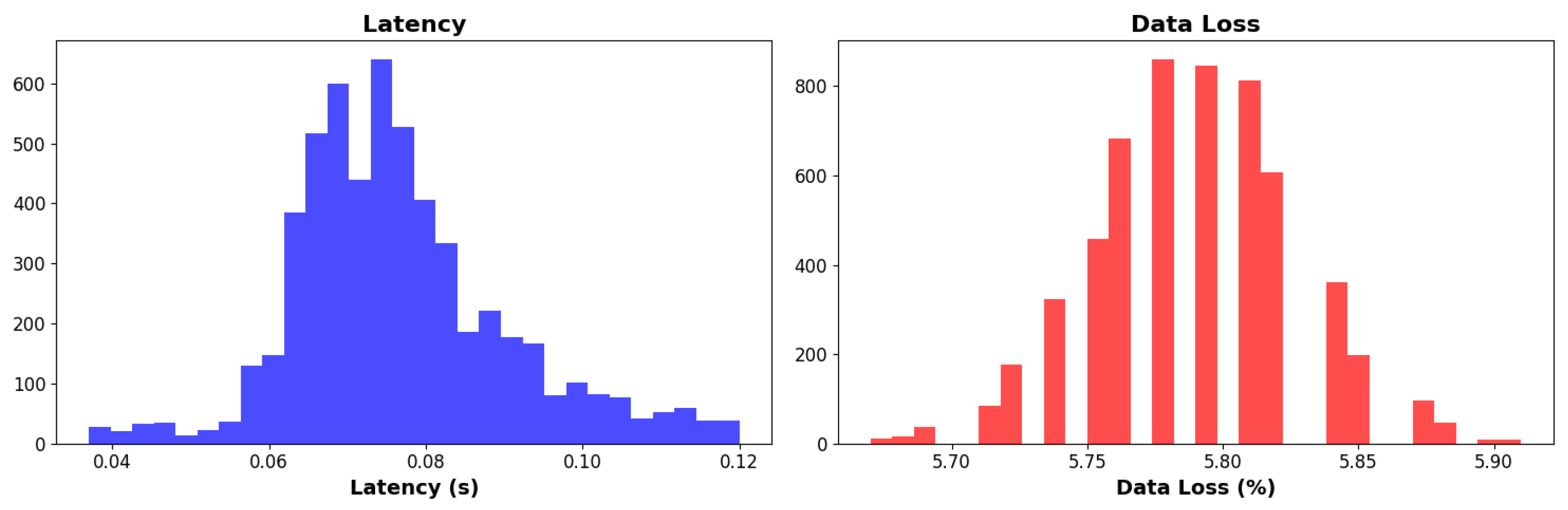
Table 2 show a significant improvement, particularly in terms of latency and packet loss. The average latency when using the 5G network was only 0.08 s, which is substantially lower than the 0.38 s recorded during WiFi operation. Furthermore, latency under 5G remained highly stable, with minimal variation, whereas WiFi communication exhibited greater fluctuations—reaching up to 1.30 s. The number of transmitted data packets was comparable in both experiments, amounting to several thousand transmissions. Packet loss for 5G was measured at 5.79%, which is less than half of the average 12.65% observed during WiFi testing. This difference confirms the higher transmission reliability of the 5G network. As illustrated by the histograms in
Figure 13, both latency and packet loss during 5G operation exhibit very stable and consistent behavior. The latency histogram shows an approximately Gaussian distribution, with a peak around 0.07 to 0.08 s. Most measured values fall within a narrow range between 0.06 and 0.09 seconds, confirming the low and stable network response time. Regarding motion-related parameters, both network configurations yielded similar values. However, a slightly higher average forward velocity was recorded during the 5G tests (0.66 m/s vs. 0.59 m/s for WiFi). The lateral velocity remained practically unchanged. Orientation-related parameters also showed no substantial differences.
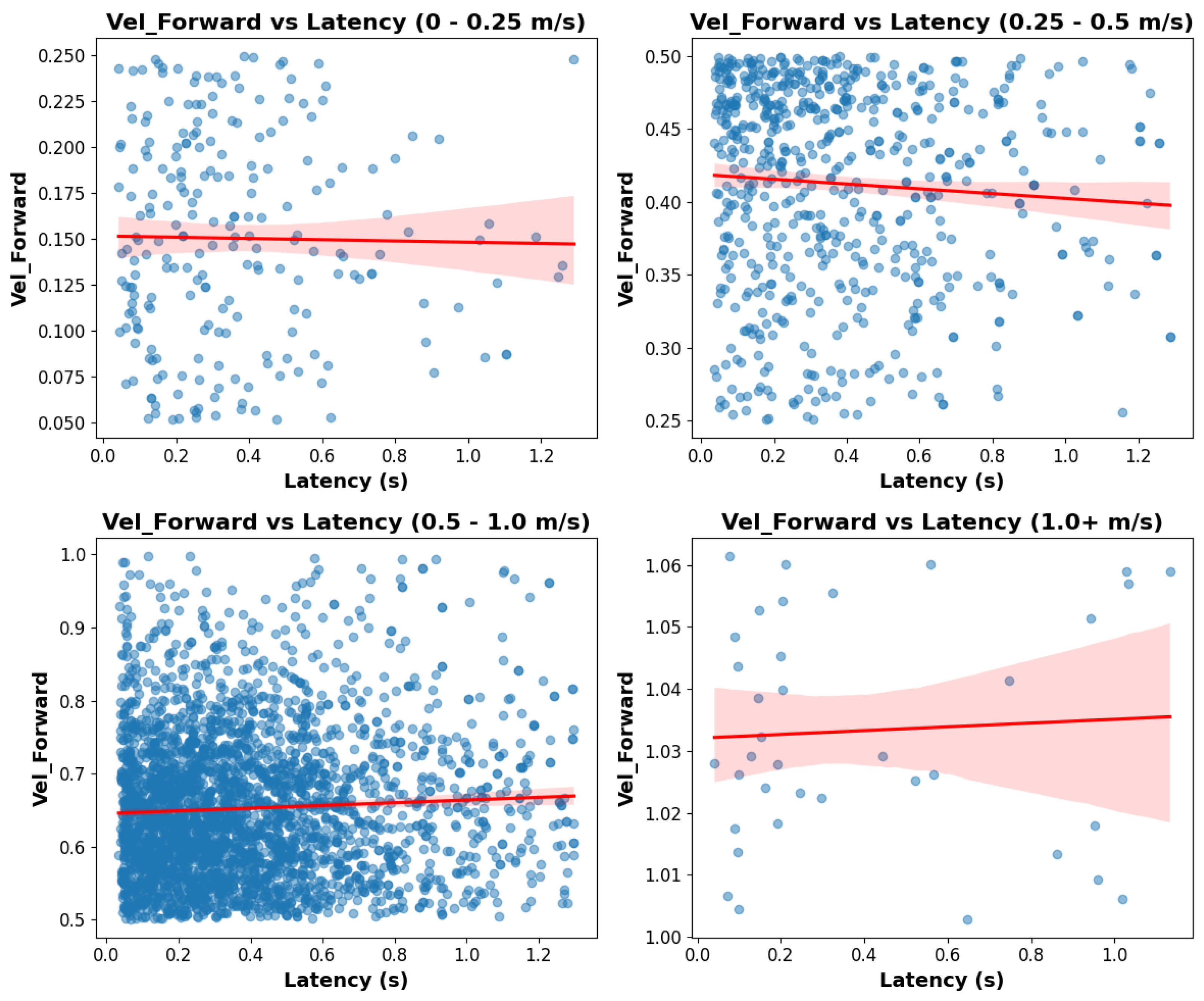
To assess the impact of the mobile robot’s forward velocity on 5G network performance, a regression analysis was conducted to examine the relationship between forward speed and connection latency (see
Figure 14). In the lowest speed range (0–0.25 m/s), a slightly increasing trend was observed, suggesting that latency tends to rise modestly with increasing speed. In the 0.25–0.5 m/s interval, the trend was mildly decreasing, which may indicate a slight improvement in transmission efficiency during moderate motion. In the most populated interval (0.5–1.0 m/s), the regression curve remained nearly flat, implying that typical operating speeds have minimal effect on latency. At higher velocities above 1.0 m/s, a slight upward trend was again observed, although the limited amount of data in this range makes it difficult to draw definitive conclusions.
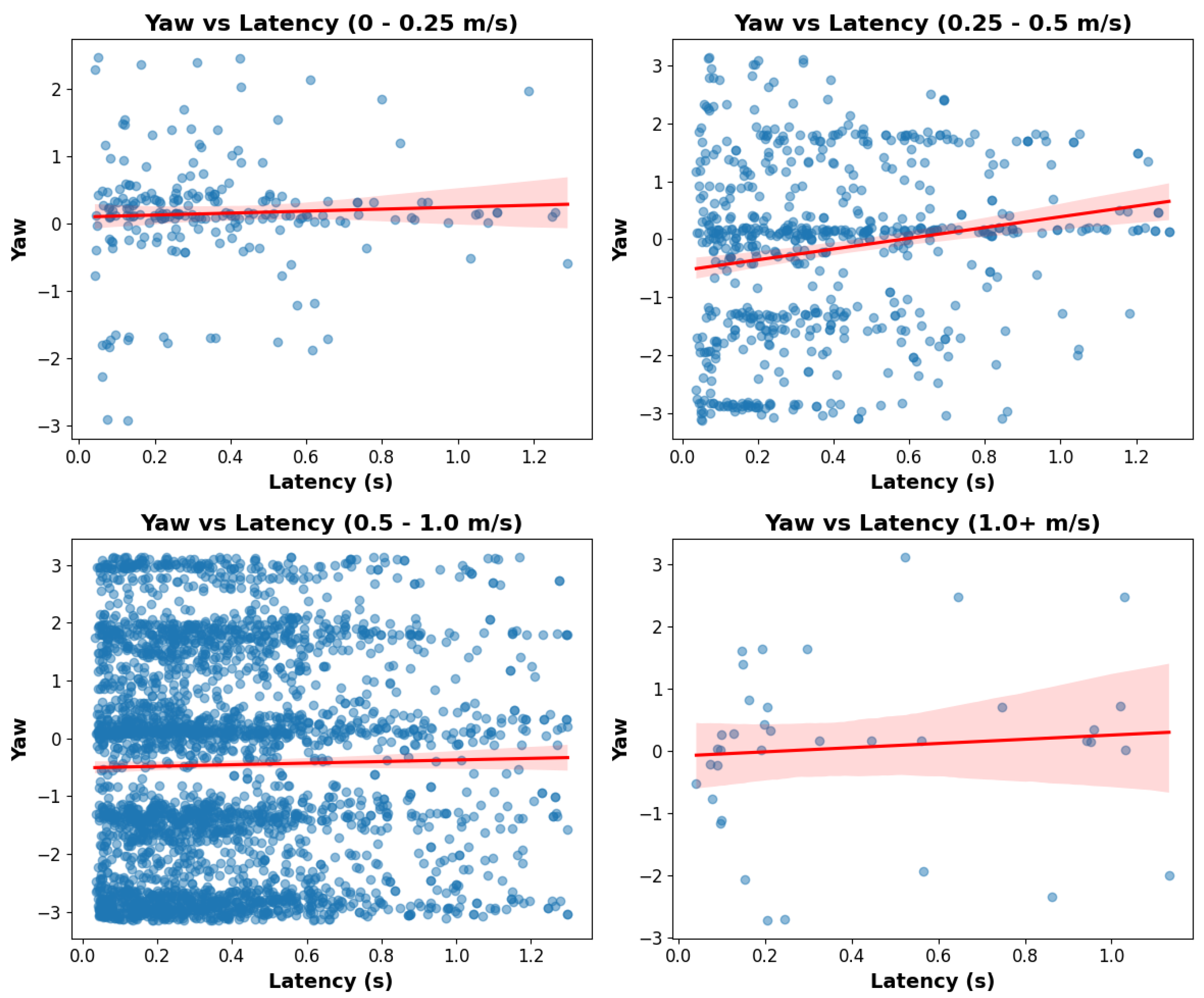
To determine whether the robot’s rotation around its vertical axis affects latency in the 5G network, a regression analysis was conducted to examine the relationship between latency and yaw across different velocity ranges (see
Figure 15). The results show that in most cases, this influence is very weak or negligible. In the lowest (0–0.25 m/s) and highest (1.0+ m/s) speed intervals, the regression curves remain nearly flat, indicating no systematic effect of rotation on latency. In contrast, within the 0.25–0.5 m/s and 0.5–1.0 m/s intervals, an increasing trend is observed, where higher yaw values are associated with a modest rise in latency. These results suggest that robot rotation may influence latency under moderate-speed conditions, likely due to dynamic orientation changes that affect signal quality. In the remaining velocity ranges, however, no clear relationship was observed.
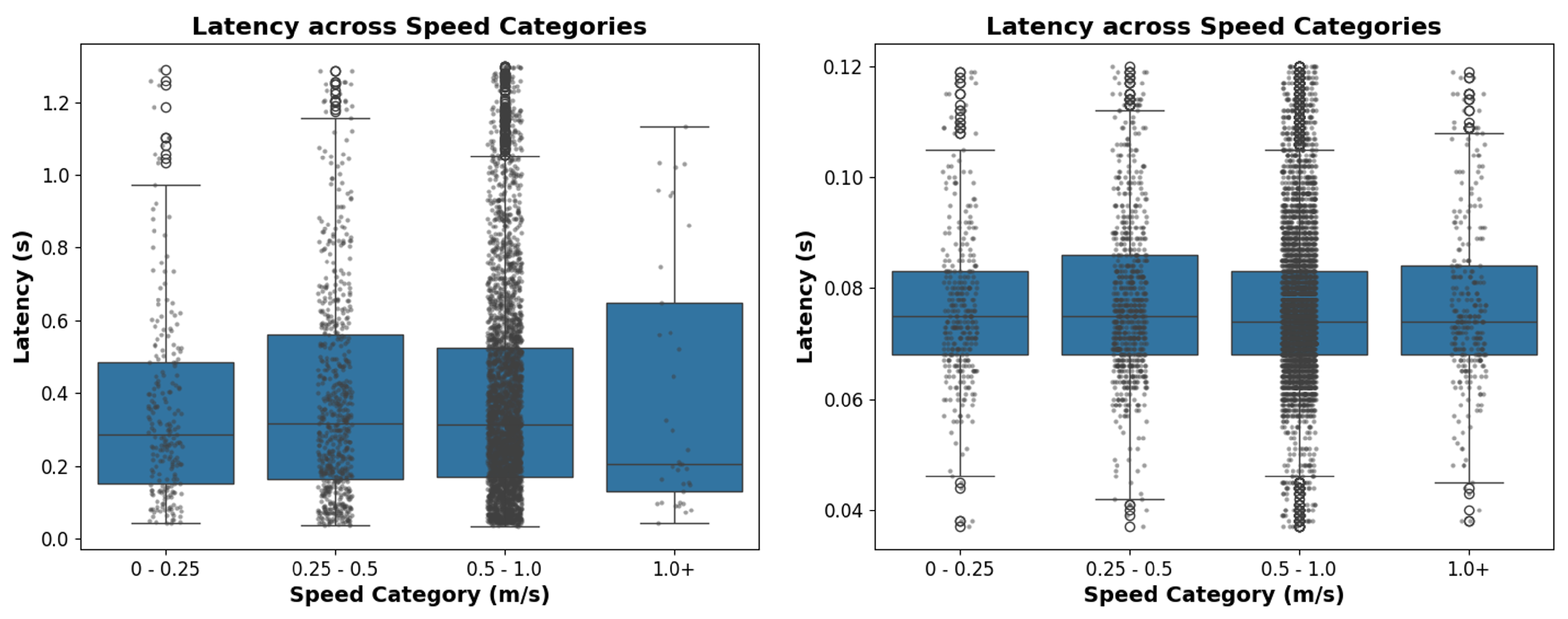
To further quantify the influence of robot speed on end-to-end latency under both wireless configurations, comparative statistical tests were conducted.
Figure 16 illustrates latency distributions across four speed intervals for WiFi and 5G communication. The data visualization is supported by corresponding ANOVA and
t-test analyses to determine the statistical significance of observed latency variations. In the WiFi case (left chart), no statistically significant difference was found between lower (≤0.5 m/s) and higher (>0.5 m/s) speed groups, as indicated by a two-sample
t-test (
,
). Similarly, one-way ANOVA testing across speed intervals yielded a non-significant result (
,
), suggesting that speed alone did not induce major latency shifts within the tested conditions. However, when grouping the data based on spatial trajectory clusters, representing distinct motion and environment interaction patterns, a highly significant difference emerged (
,
). This implies that context-dependent motion characteristics (e.g., frequent turns, changes of direction, proximity to obstacles), rather than speed per se, may have a stronger effect on latency under WiFi conditions. In contrast, the 5G case (right chart) revealed a modest but statistically significant difference between low- and high-speed regimes (
,
), indicating some degree of latency sensitivity to increased velocity. The corresponding one-way ANOVA across speed intervals approached significance (
,
), suggesting potential velocity-related latency trends that merit further exploration. Moreover, latency variations across spatial trajectory clusters were also significant (
,
), reinforcing the role of motion context and environment in influencing network behavior, even under more stable link conditions.
6.4. Electromagnetic Disturbance and Its Effect on Communication Quality
This subsection investigates the effects of electromagnetic interference (EMI), a phenomenon commonly encountered in industrial environments. EMI occurs when external electromagnetic fields disrupt the normal operation of electronic systems or interfere with data transmission. In essence, EMI introduces unwanted signals or noise into communication channels, potentially leading to transmission errors or data loss. Typical sources of EMI in industrial settings include electric motors, frequency converters, and various control systems. The measurement environment remained the same as in the previous experiments, which implies a high likelihood of EMI originating from nearby robotic cells. To simulate realistic interference conditions, all surrounding robotic systems were powered on, and two industrial robots—ABB IRB1200 and ABB IRB1600 [
33]—were actively operating during the test (see
Figure 4).
Based on the comparison of two distinct operating conditions—one without active robotic control units and the other with them fully operational—a clear impact of these devices on wireless network quality was identified. The most significant difference was observed in the latency parameter (see
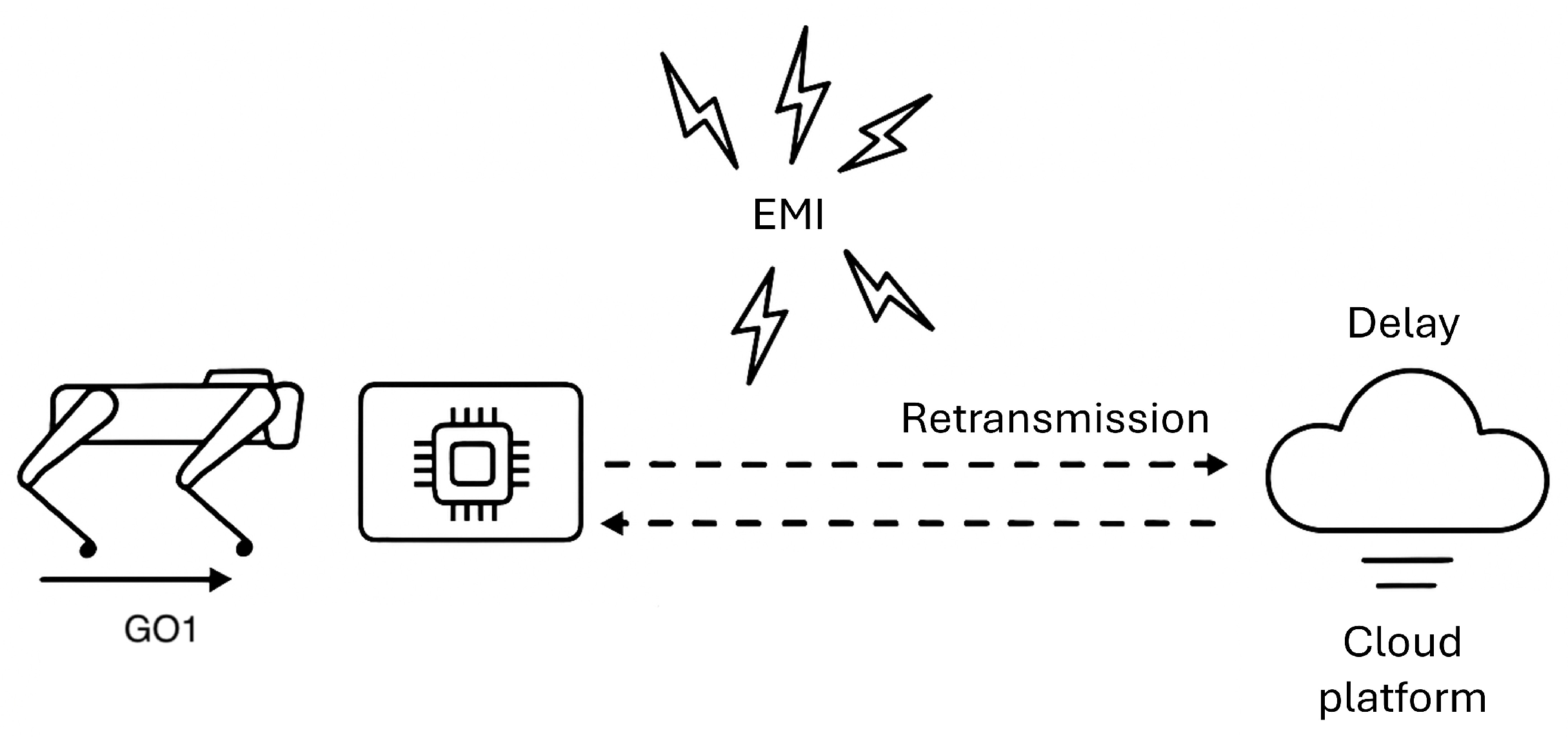
Table 3). While the network response time in the idle, interference-free state averaged only 0.38 s, it increased dramatically to an average of 122.18 s during active operation of the robotic systems. In extreme cases, latency reached up to 410 s, effectively rendering real-time communication infeasible and pointing to severe disruption of the transmission layer due to electromagnetic interference (EMI). Additionally, changes in RSSI values were observed, with the average signal strength increasing under EMI conditions. However, this increase cannot be interpreted as an improvement in connection quality—elevated RSSI may result from environmental interference. Despite higher RSSI readings, network responsiveness deteriorated significantly, confirming that stronger signal strength in this context does not correlate with better link quality. Packet loss, measured as the percentage of lost packets, slightly decreased under EMI conditions from 12.65% to 7.95%. This reduction may be attributed to variations in data flow, temporary filtering mechanisms, or protocol behavior under extreme latency. Therefore, it should not be considered an indication of improved transmission reliability. Motion and orientation parameters, such as translational velocities, inclinations, and rotations, remained virtually unchanged between both operating conditions. As a result, they are not included again in the summary table, as their values were consistent with those reported in previous sections. The operation of robotic control units has a demonstrably negative effect on WiFi network quality, most notably reflected in the dramatic increase in latency and reduced communication stability. This degradation can significantly affect the reliability of network protocols, such as MQTT. EMI may disrupt transmission integrity and lead to repeated packet retransmissions, which in turn causes latency to rise sharply (see
Figure 17).
As with the WiFi network, additional measurements were carried out for the 5G network in the presence of electromagnetic interference (EMI) to assess its impact on communication quality during mobile robot operation. The measurements were conducted in the same environment and under comparable operating conditions to enable an objective comparison of how both technologies respond to external interference. The same performance parameters were monitored as in previous experiments. While the WiFi-based system exhibited a strong response to EMI—most notably in the form of dramatically increased latency—the 5G measurements revealed no significant observable effect on communication quality. Latency remained stable at 0.07 s with minimal variation, and packet loss stayed at 5.78%, nearly identical to the values recorded under interference-free conditions (see
Table 4). These results indicate that the 5G network demonstrates a high degree of resilience to electromagnetic interference, even while maintaining typical robot motion characteristics, which remained virtually unchanged during the test.
The comparison between WiFi and 5G (see
Table 5) connectivity highlights distinct strengths of both technologies depending on the application context. While WiFi demonstrated acceptable signal strength and remains suitable for many non-critical or repetitive robotic tasks, its performance under dynamic conditions was limited by higher latency (average 380 ms, up to 1.3 s) and packet loss around 12.65%, particularly in the presence of electromagnetic interference. In contrast, the 5G network maintained low and stable latency (35–70 ms), minimal packet loss (5.78%), and high resilience to EMI, making it better suited for applications requiring real-time responsiveness and communication stability. Overall, WiFi remains a viable and accessible solution for tasks with moderate network demands, while 5G provides enhanced performance for more demanding, real-time robotic scenarios, especially in industrial or interference-prone environments.
7. Discussion
During the course of this research, several important questions emerged regarding the relationship between robot motion and wireless communication performance. To deepen the interpretation of the results and identify potential future directions, we address these questions in the form of a structured discussion. This format allows us to critically reflect on the findings, assess their practical implications, and consider how they may inform the development of communication-aware robotic systems.
Q1: To what extent does robot motion truly influence wireless communication latency?
The experimental results demonstrate that motion dynamics—especially yaw and high forward velocity—correlate with increased latency and packet loss. While roll and pitch showed limited influence, yaw-induced rotation frequently resulted in antenna misalignment and momentary connection degradation. These effects were particularly pronounced in the 0.25–0.5 m/s range, where turning behavior was most frequent. However, the overall relationship remains weak to moderate, indicating that motion alone may not be a dominant factor, but a significant one when combined with environmental variability or marginal signal conditions.
Q2: Can these motion-induced effects be mitigated in practical robotic deployments?
Yes, partially. Several mitigation strategies are viable: using omnidirectional antennas to reduce sensitivity to orientation, implementing software-level buffering and prediction, or designing communication-aware trajectories that minimize unnecessary rotation. Additionally, scheduling communication bursts during low-dynamic phases could improve reliability. These findings support the need for latency-aware motion planning in real-time applications such as cooperative navigation or cloud-based control.
Q3: How do WiFi and 5G compare under identical motion conditions?
The 5G network consistently outperformed WiFi across all scenarios, exhibiting lower average latency (80 ms vs. 380 ms) and significantly less packet loss. Moreover, while WiFi performance degraded heavily under electromagnetic interference, 5G maintained stability. This suggests that for latency-critical robotic tasks—especially in EMI-prone environments—5G offers a much more robust foundation. However, WiFi still remains useful for lower-demand or cost-sensitive deployments, particularly when enhanced with redundant or adaptive protocols.
Q4: How do stochastic cloud delays affect the reported latency measurements?
Inherent stochastic delays within the cloud infrastructure, driven by dynamic resource allocation or server load, are beyond direct experimental control. While our one-trip latency measurements include this variable component, its precise contribution to overall latency variability is challenging to isolate from wireless transmission delays. Future research could provide valuable insights by analyzing this variable in more detail.
Q5: What is the relevance of these findings in the context of smart cities?
As smart cities increasingly adopt mobile robotic systems for infrastructure inspection, logistics, or surveillance, the need for resilient and predictable communication becomes critical. The study reveals that motion dynamics can not be ignored as a source of network variability. Incorporating network performance models into robot decision-making processes aligns well with the goals of interoperable, data-driven, and responsive mobility systems in urban environments.
Q6: Does robot-generated EMI pose a threat to its own communication reliability?
This question remains open for deeper investigation. The current study focused on external EMI sources (e.g., nearby robots), but in multi-robot systems or compact industrial cells, self-emitted electromagnetic noise may contribute to signal degradation. Early results suggest that orientation and proximity to power electronics could influence local signal quality, warranting further research into self-EMI shielding and adaptive frequency hopping strategies.
Q7: What are the limitations of applying these results to uncontrolled environments?
While the experiments were conducted in a controlled indoor laboratory, this setting inherently limits the generalizability of the results. In real-world environments such as outdoor urban spaces, multi-floor buildings, or industrial sites with frequent layout changes, additional factors come into play. These include more severe and unpredictable multipath propagation, variable antenna occlusion due to larger structures or moving obstacles, and higher levels of dynamic electromagnetic interference from unregulated sources. Furthermore, GPS-denied environments or partial line-of-sight conditions could exacerbate latency and packet loss, especially for protocols with low delivery guarantees. Future experiments in such settings are necessary to assess how robustly the observed trends extend beyond controlled indoor conditions.
Q8: How can the presented findings be applied to future system design?
The insights offer a roadmap for the development of communication-aware path planning algorithms. By penalizing motion segments with high yaw rates or regions prone to signal degradation, robots can make real-time decisions that balance task efficiency with network stability. Additionally, combining motion data with predictive latency models can support preemptive QoS management, enabling adaptive switching between WiFi and 5G or edge vs. cloud processing depending on the predicted network state.
Q9: What is the long-term vision emerging from this research?
The results motivate a shift toward network-cognizant robotic behavior, where mobility and communication are co-optimized rather than treated independently. In the long term, this convergence may yield systems that dynamically adapt their motion, processing location (edge/cloud), and communication protocols based on predicted or real-time network conditions. Such systems would be self-aware, resilient, and truly suited for deployment in smart, connected urban environments.
8. Conclusions and Future Directions
The experimental results clearly demonstrate that the dynamic behavior of mobile robotic systems has a substantial impact on wireless communication performance, particularly in the context of WiFi-based connectivity. Variations in translational speed and orientation—especially yaw (rotations around the vertical axis)—were shown to correlate strongly with increased network latency and packet loss. These findings underline the necessity of considering motion dynamics as a critical factor when designing communication protocols and planning trajectories in mobile Internet of Robotic Things (IoRT) systems.
While previous studies have often assumed quasi-static conditions or focused solely on environmental interference, this research confirms that robot-induced dynamics alone can lead to significant degradation of communication quality. In particular, rapid directional changes result in frequent reorientation of antennas, potentially causing temporary signal obstructions or misalignments with access points. This highlights the need for future communication-aware control frameworks that integrate motion dynamics as a variable directly influencing real-time network behavior.
Despite the relatively poor latency performance observed in the WiFi setup—averaging 380 ms, with peaks exceeding 1.3 s—WiFi still exhibits practical potential due to its widespread availability, simplicity, and cost-efficiency. Enhancing this technology through adaptive mechanisms such as predictive channel switching, transmit power control, or multipath redundancy could significantly increase its viability in moderate-demand robotic scenarios. Nevertheless, 5G networks clearly outperformed WiFi in this study, maintaining low latency (80 ms), minimal packet loss (5.8%), and strong resilience to electromagnetic interference (EMI). This improved resilience is primarily attributed to 5G’s use of licensed spectrum with lower background noise. Furthermore, the 5G modem used in this experiment offers enhanced hardware shielding and error correction, which further contributes to stable communication even in electromagnetically noisy industrial environments. These characteristics make 5G a promising candidate for applications with stringent real-time requirements.
An intriguing analogy can be drawn from human perceptual capabilities: just as humans do not require continuous visual input to navigate effectively—often relying on internal models and short-term memory—mobile robots may also tolerate intermittent or delayed network data, provided they possess robust onboard state estimation and predictive navigation capabilities. The average human visual reaction time, typically between 200 and 250 ms, serves as a relevant reference point for latency tolerance in human-in-the-loop or biomimetic robotic systems.
From a control perspective, the results further indicate that yaw dynamics have a notably greater effect on latency than either roll or pitch. This is particularly evident in velocity ranges between 0.25 and 0.5 m/s, where a clear upward trend between yaw and latency was observed. Such findings suggest that future robotic systems may need to incorporate latency-aware path planning, possibly penalizing trajectories involving frequent rotational maneuvers in latency-sensitive tasks.
Moreover, this study raises a compelling avenue for future research: analyzing the effect of electromagnetic emissions generated by the robot itself on surrounding wireless infrastructure. In multi-robot systems or EMI-sensitive environments, the cumulative impact of self-emission may degrade network quality in complex and currently underexplored ways.
In conclusion, dynamic properties of mobile robots are not merely mechanical or control-related concerns—they are intrinsically linked to the performance and reliability of wireless communication systems. As such, integrating motion-aware communication strategies will be essential for the deployment of responsive, autonomous, and collaborative robotic platforms in real-world environments.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}