
Predicting Autonomous Driving Behavior through Human Factor Considerations in Safety-Critical Events
Abstract
1. Introduction
2. Related Research
3. Methodology
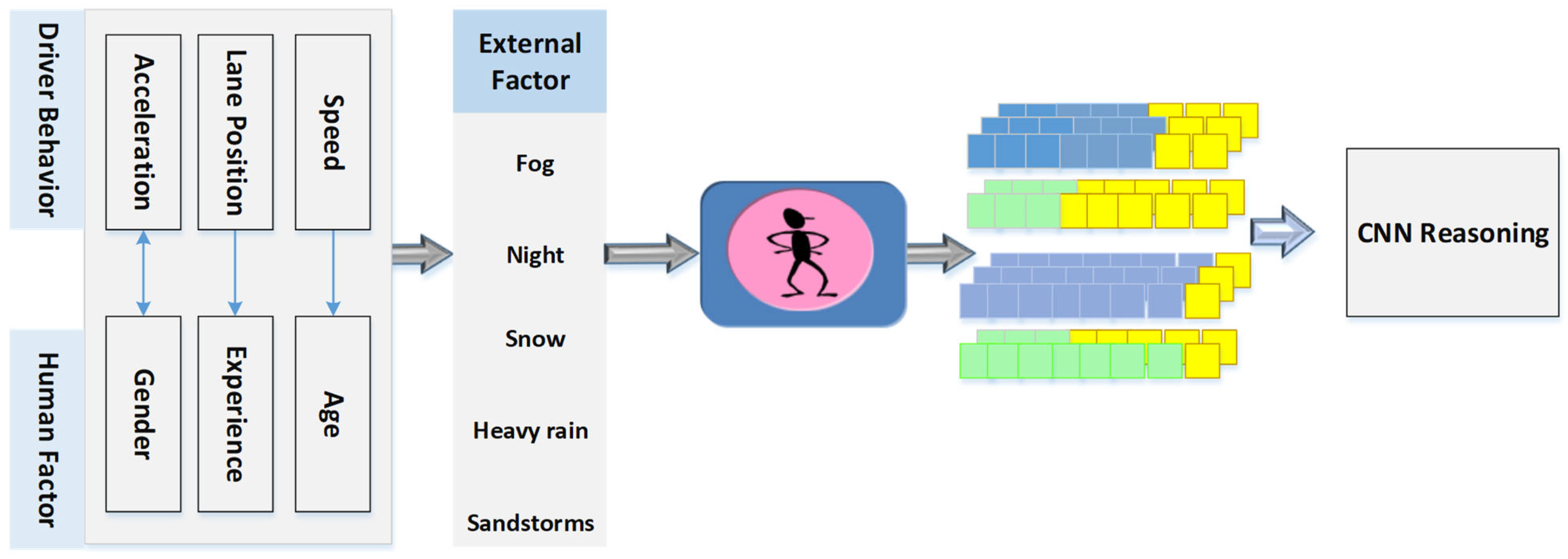
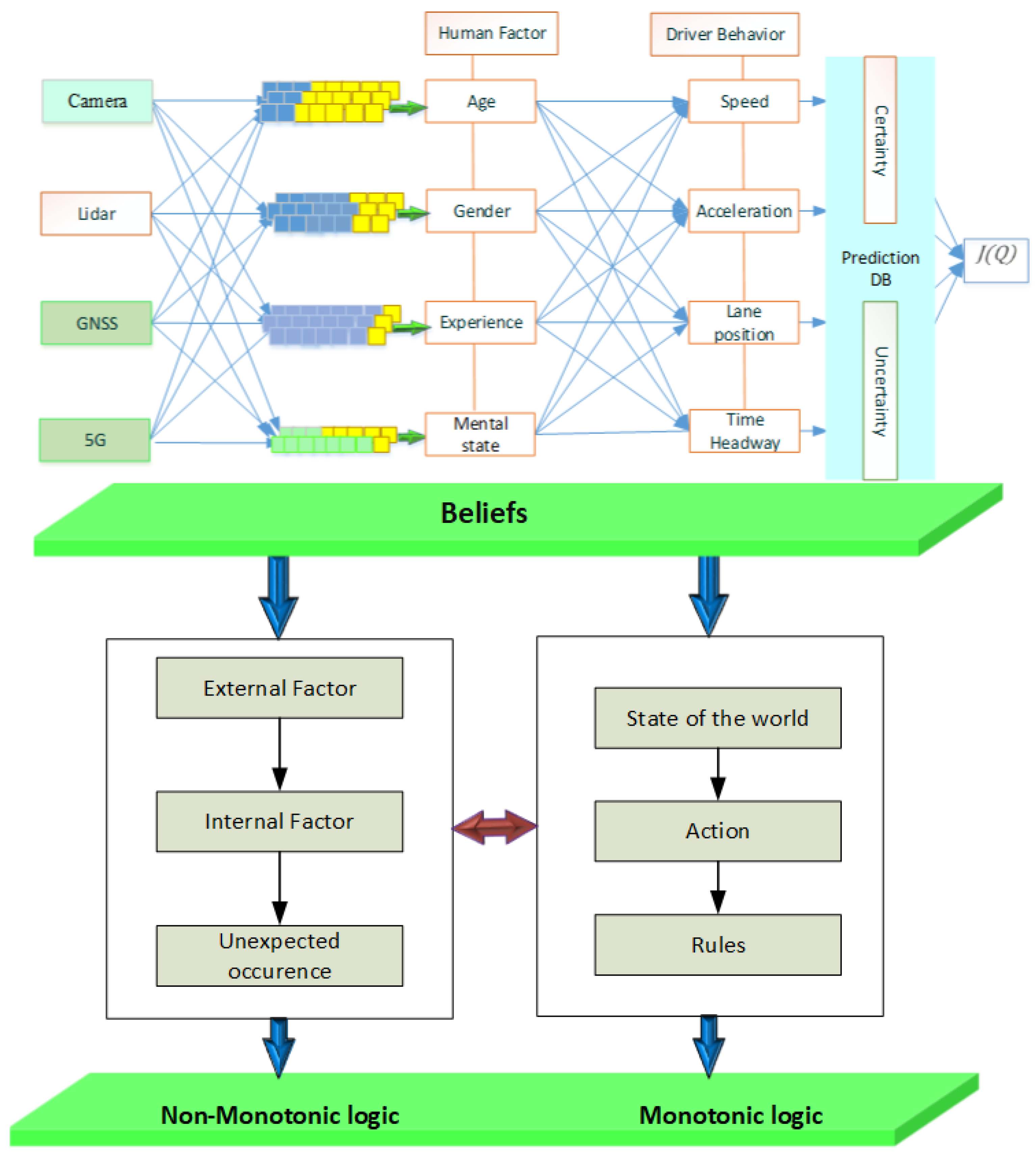
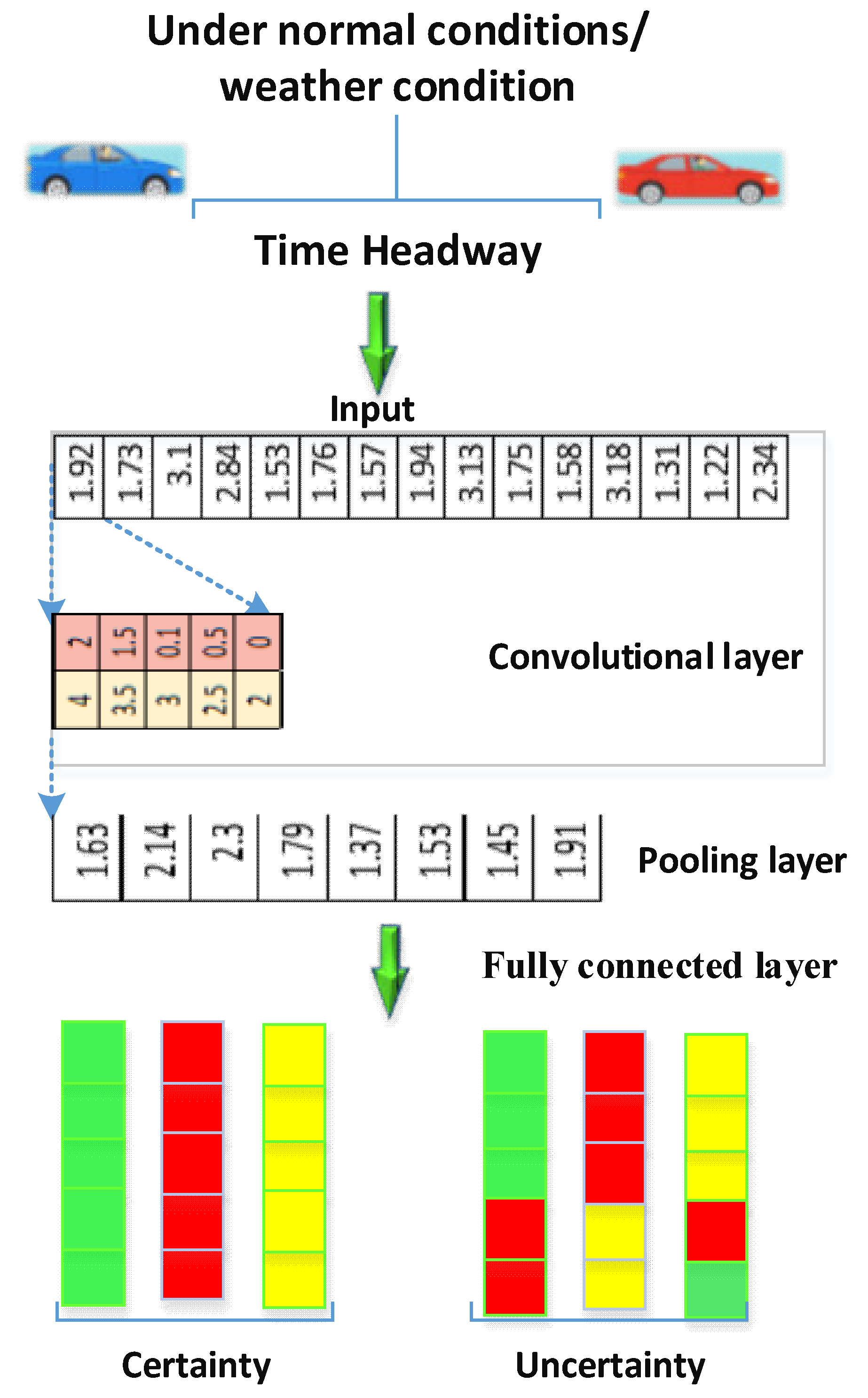
3.1. The CNN Reasoning Approach
3.2. Data Collection
3.3. Algorithm Description
3.4. Feature Extraction
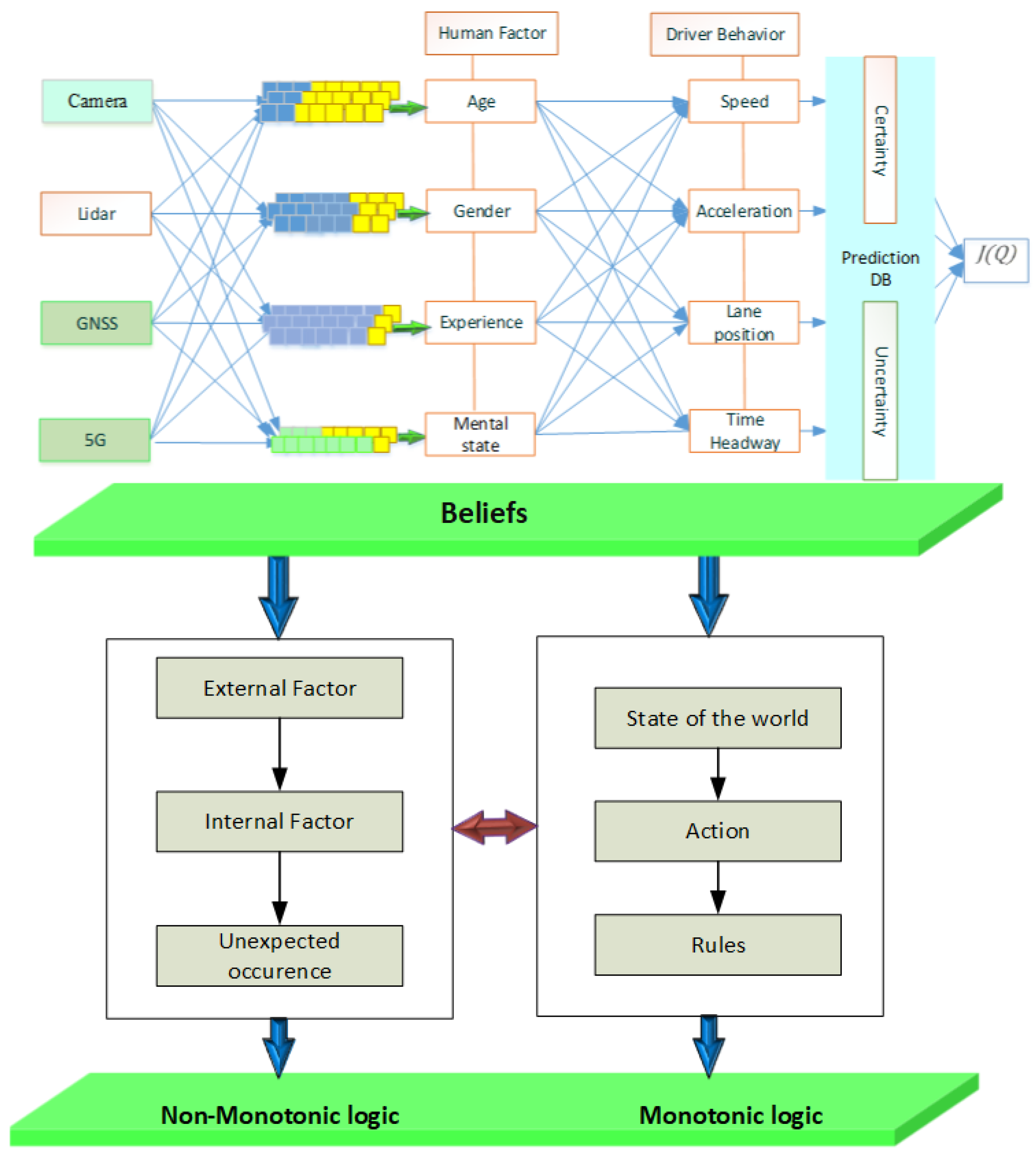
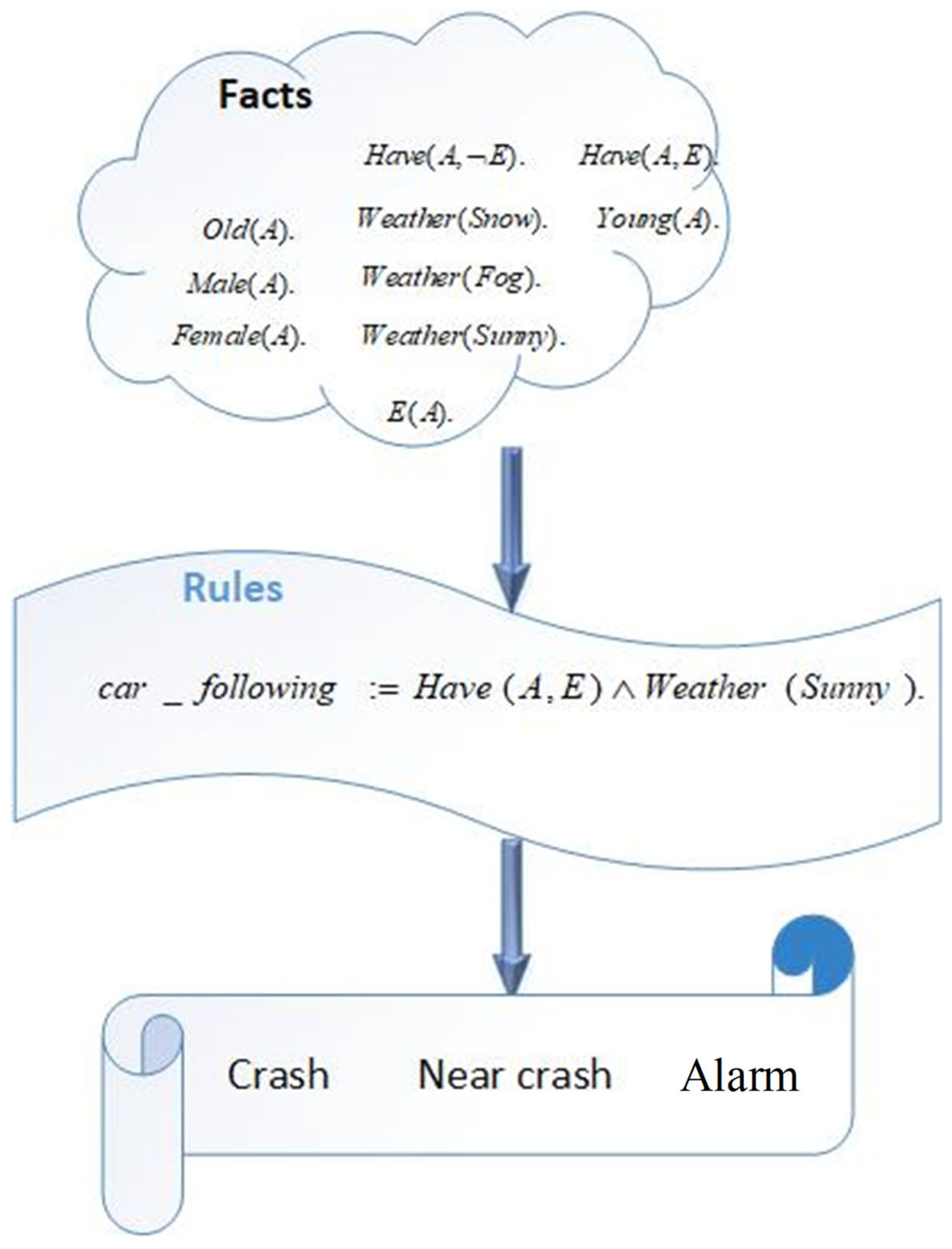
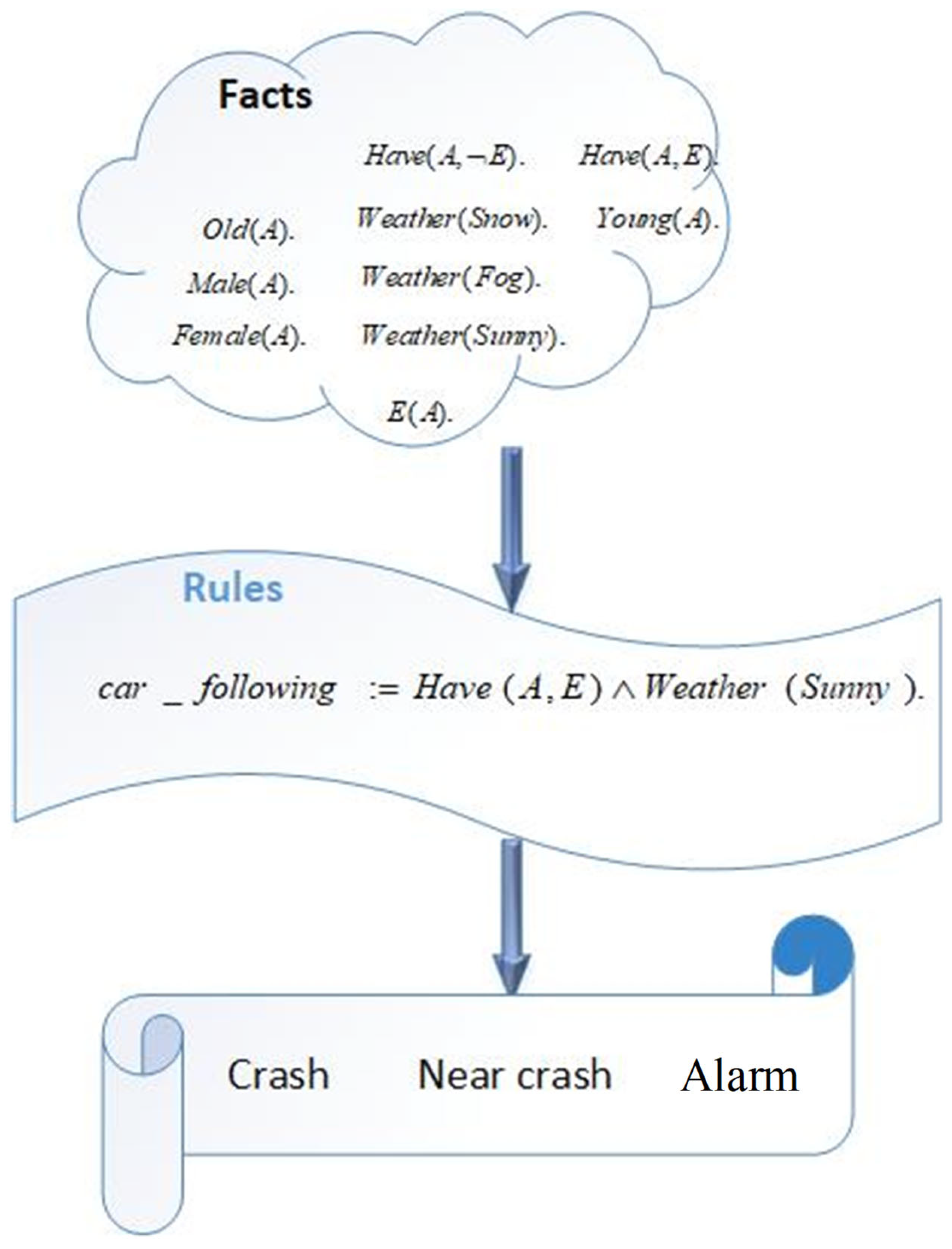
3.5. Reasoning-Based Non-Monotonic Logic
4. Discussion and Analysis
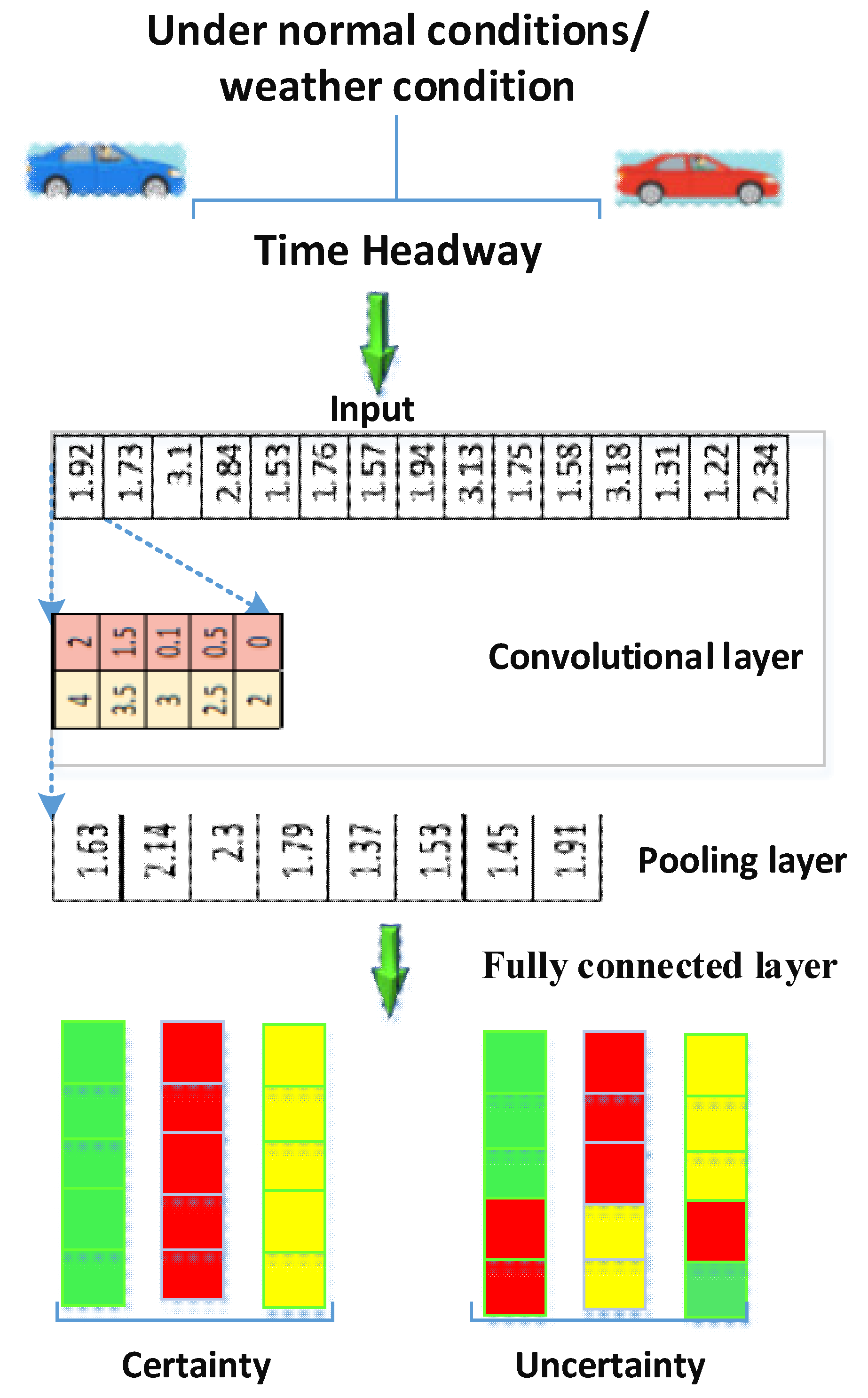
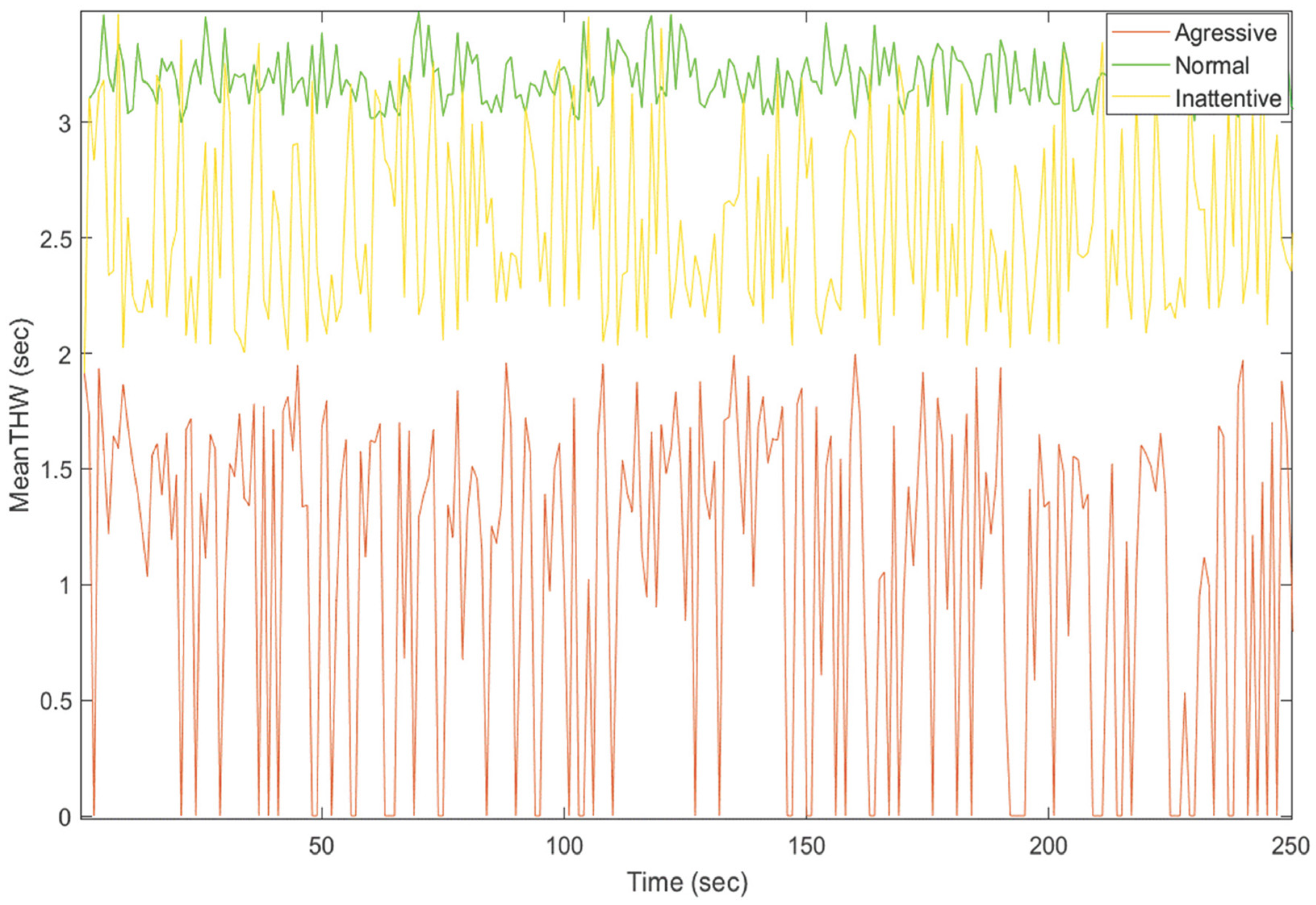
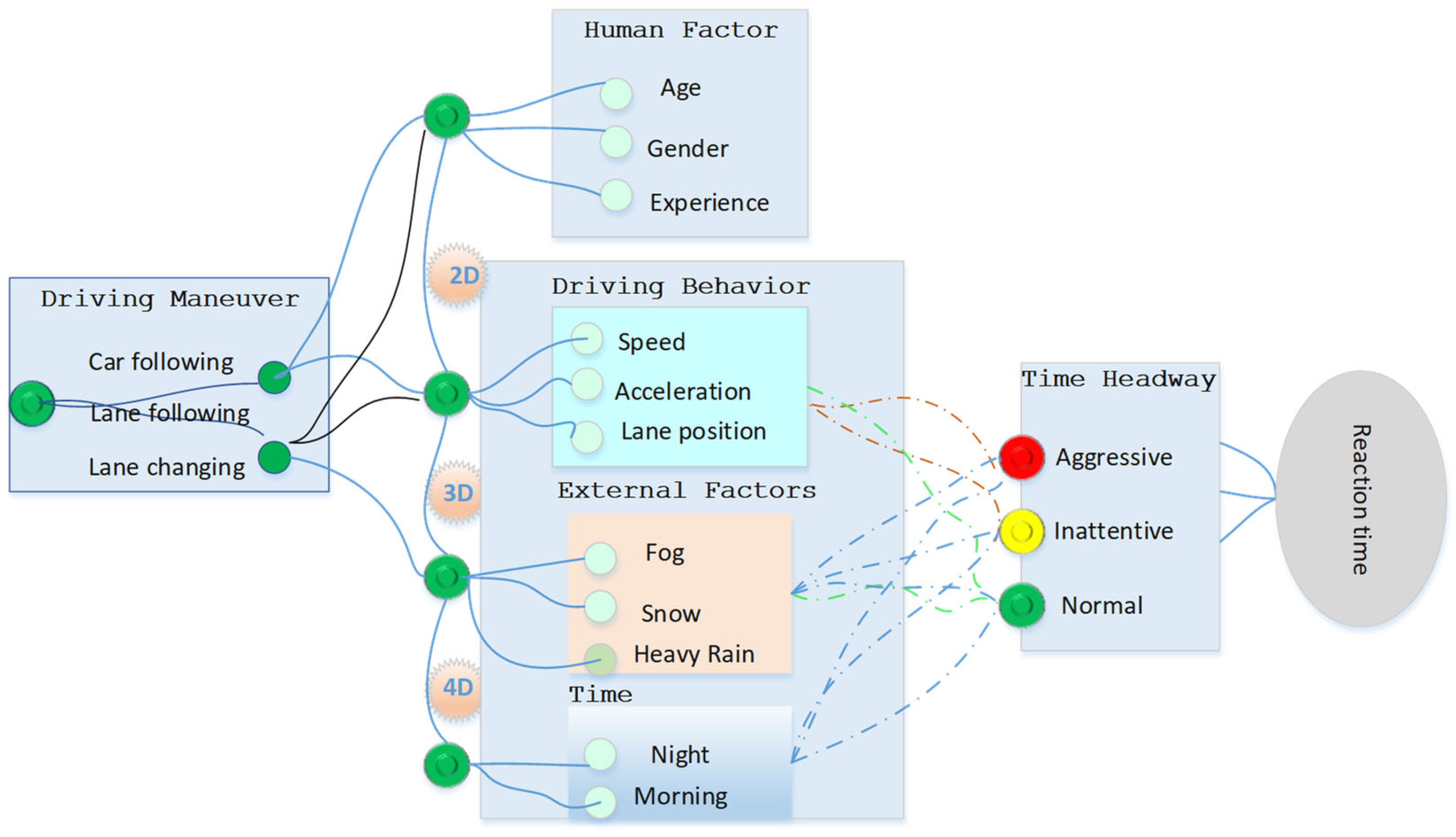
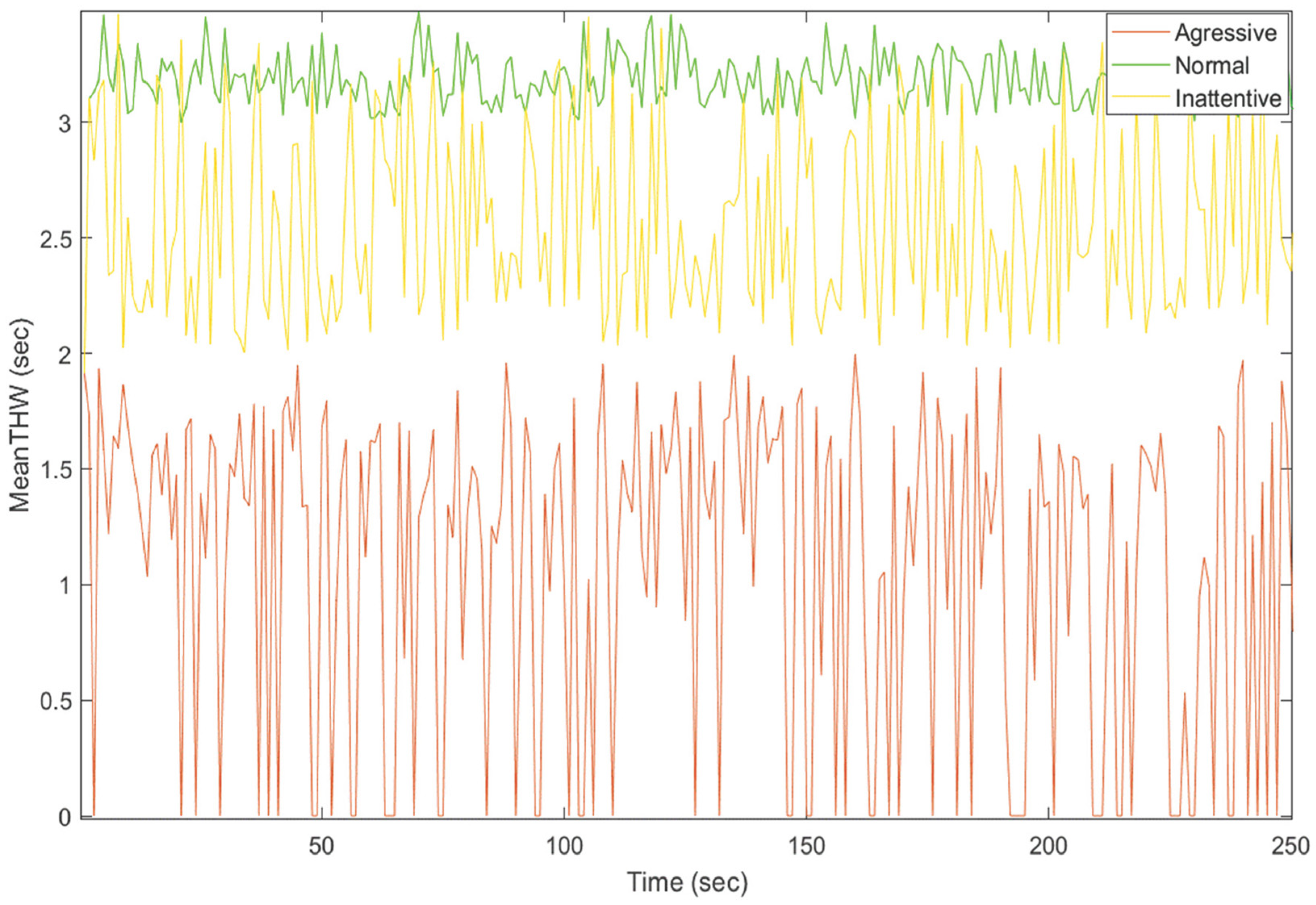
- (i)
- ‘aggressive’: a shorter car time headway, (0–2 s);
- (ii)
- ‘inattentive’: a longer reaction time (2–3 s);
- (iii)
- ‘normal’ for intermediate values of reaction time and car time headway (longer than 3 s), i.e., maintaining adaptive cruise control, which is expressed in terms of adaptive relative distance [m] and constant relative speed [m/s].
- ○
- Aggressive driver profile: A driver i is considered to be aggressive with respect to a threshold t*, for the time headway THW if
- ○
- Inattentive driver profile (a driver with a long reaction time): A driver i is considered to be inattentive (with a long reaction time) with respect to a threshold on the time headway THW if
- ○
- Normal driver profile: Drivers whose profiles are neither aggressive or inattentive are called normal. They have intermediate values for reaction time headway (e.g., <1 s).
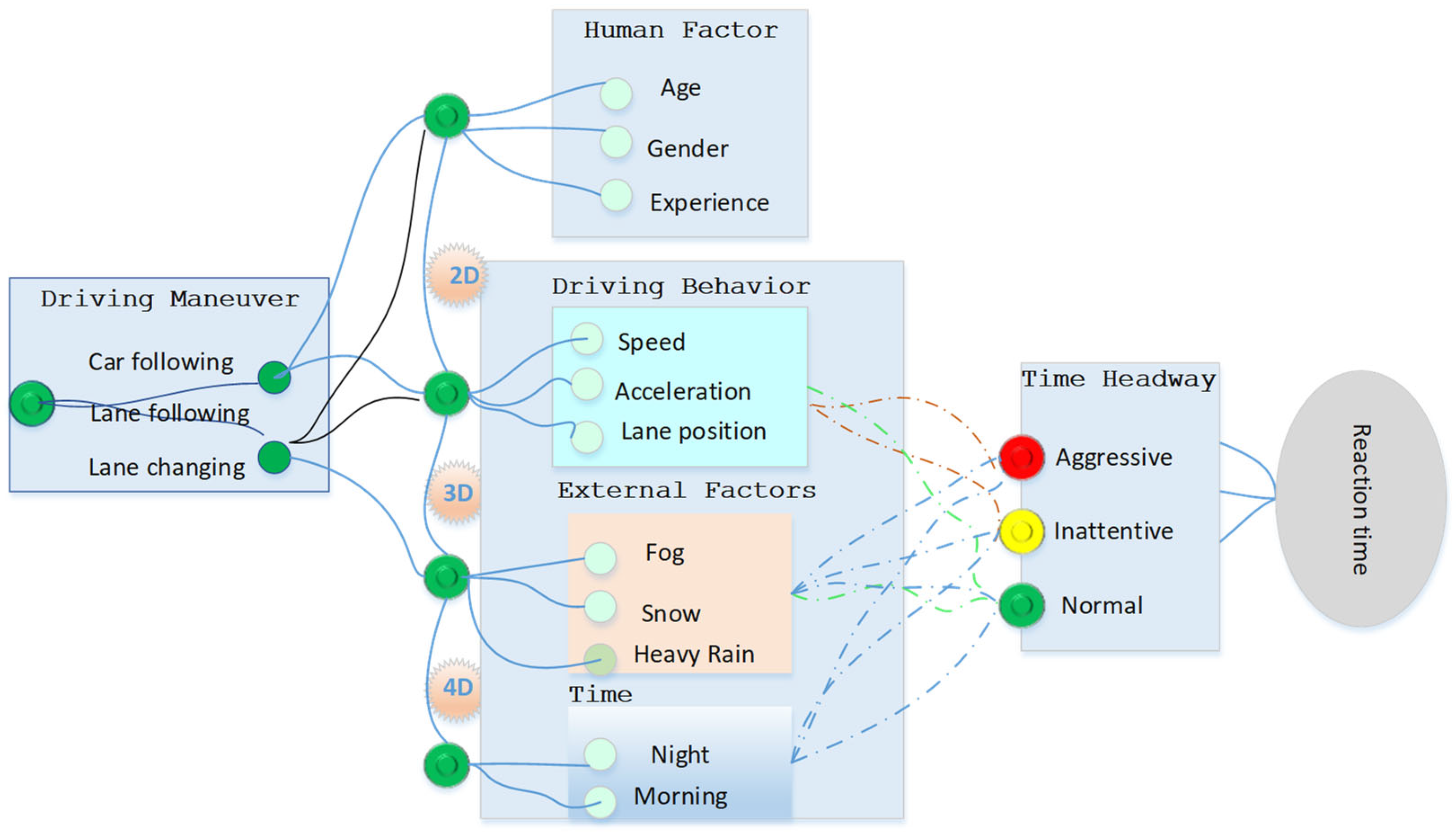
The Combination of Human Factors and Driving Behaviors
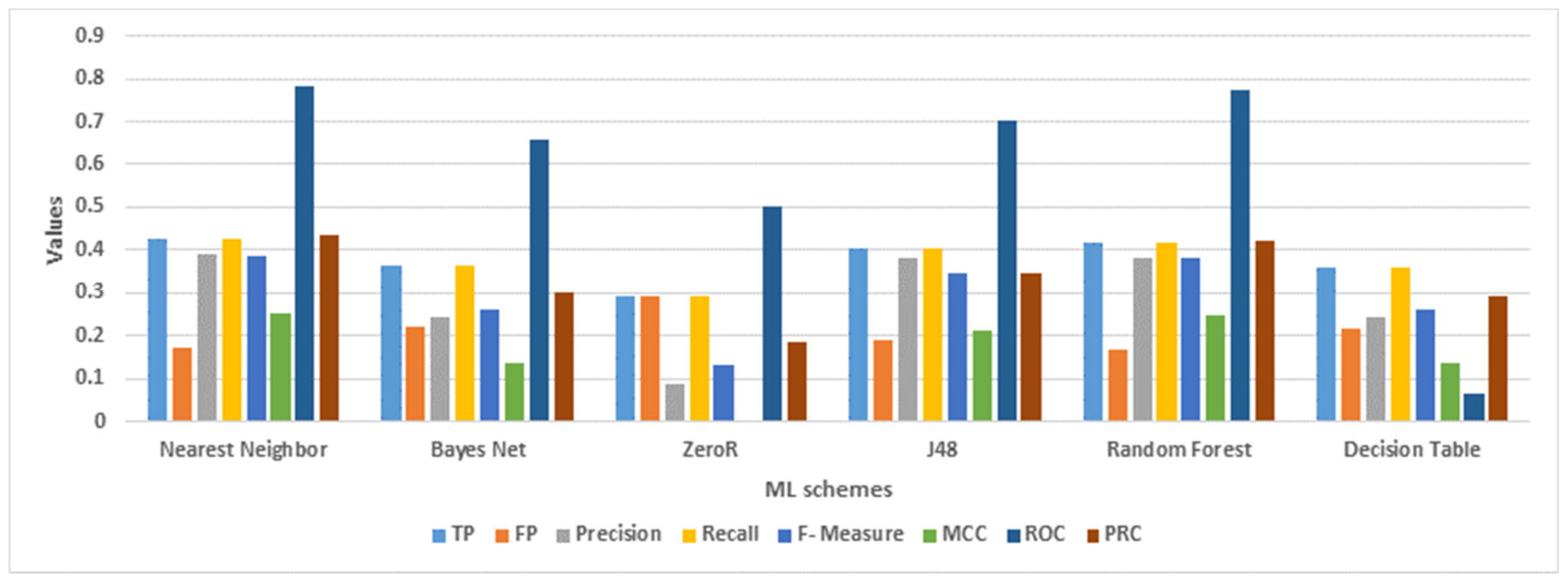
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yarlagadda, J.; Pawar, D.S. Heterogeneity in the Driver Behavior: An Exploratory Study Using Real-Time Driving Data. J. Adv. Transp. 2022, 2022, 4509071. [Google Scholar] [CrossRef]
- Zhai, C.; Wu, W. A new car-following model considering driver’s characteristics and traffic jerk. Nonlinear Dyn. 2018, 93, 2185–2199. [Google Scholar] [CrossRef]
- Raiyn, J.; Weidl, G. Improving Autonomous Vehicle Reasoning with Non-Monotonic Logic: Advancing Safety and Performance in Complex Environments. In Proceedings of the 2023 IEEE International Smart Cities Conference, Bucharest, Romania, 24–27 September 2023; University POLITEHNICA of Bucharest: Bucharest, Romania, 2023. [Google Scholar]
- Bouhsissin, S.; Sael, N.; Benabbou, F. Driver Behavior Classification: A Systematic Literature Review. IEEE Access 2013, 11, 14128–14153. [Google Scholar] [CrossRef]
- Weidl, G.; Madsen, A.L.; Wang, S.R.; Kasper, D.; Karlsen, M. Early and Accurate Recognition of Highway Traffic Maneuvers Considering Real-World Application: A Novel Framework Using Bayesian Networks. IEEE Intell. Transp. Syst. Mag. 2018, 10, 146–158. [Google Scholar] [CrossRef]
- Abdar, M.; Pourpanah, F.; Hussain, S.; Rezazadegan, D.; Liu, L.; Ghavamzadeh, M.; Fieguth, P.; Cao, X.; Khosravi, A.; Acharya, R.; et al. A Review of Uncertainty Quantification in Deep Learning: Techniques. Inf. Fusion 2021, 76, 243–297. [Google Scholar] [CrossRef]
- Bhargavi, R. Road Rage and Aggressive Driving Behavior Detection in Usage-Based Insurance Using Machine Learning. Int. J. Softw. Innov. 2019, 11, 1–29. [Google Scholar] [CrossRef]
- Wang, J.; Li, K.; Lu, X.-Y. Effect of Human Factors on Driver Behavior. In Advances in Intelligent Vehicles; Academic Press: Cambridge, MA, USA, 2013; pp. 111–155. [Google Scholar]
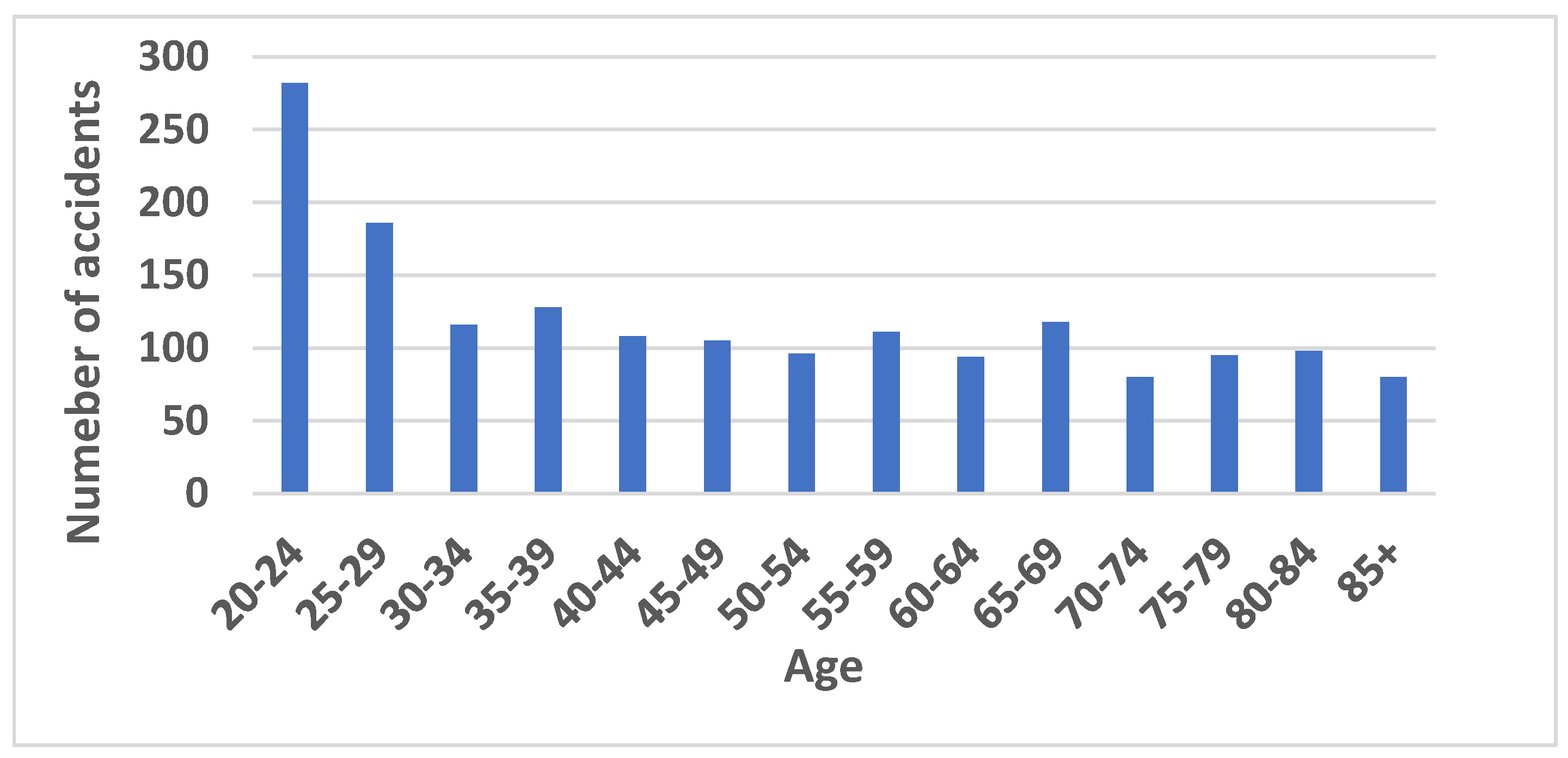
- Hiang, T.S.; Ming, G.L. Speeding driving behavior: Age and gender experimental analysis. MATEC Web Conf. 2016, 74, 30. [Google Scholar]
- Rousseeuw, P.J. Silhouettes: A Graphical Aid to the Interpretation and Validation of Cluster Analysis. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef]
- Nguyena, T.T.; Krishnakumaria, P.; Calverta, S.-C.; Vub, H.-L.; Lintam, H. Feature extraction and clustering analysis of highway congestion. Transport. Res. Part C Emerg. Technol. 2019, 100, 238–258. [Google Scholar] [CrossRef]
- Neurohr, C.; Westhofen, L.; Butz, M.; Bollmann, H.M.; Eberle, U.; Galbas, R. Criticality Analysis for the Verification and Validation of Automated Vehicles. IEEE Access 2021, 9, 18016–18041. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Lu, X.; Li, K. Driver Characteristics Based on Driver Behavior. In Transportation Technologies for Sustainability; Ehsani, M., Wang, F.Y., Brosch, G.L., Eds.; Springer: New York, NY, USA, 2013. [Google Scholar]
- Oppenheim, M.; Parmet, I.; Oron-Gilad, Z.T. Can Driver Behavior Be Traced to Gender Role, Sex and Age? Adv. Transp. 2022, 60, 450–459. [Google Scholar] [CrossRef]
- Lee, D.; Guldmann, J.-M.; von Rabenau, B. Impact of Driver’s Age and Gender, Built Environment, and Road Conditions on Crash Severity: A Logit Modeling Approach. Int. J. Environ. Res. Public Health 2023, 20, 2338. [Google Scholar] [CrossRef]
- Shahverdy, M.; Fathy, M.; Berangi, R.; Sabokrou, R. Driver behavior detection and classification using deep convolutional neural networks. Expert Syst. Appl. 2020, 149, 113240. [Google Scholar] [CrossRef]
- Liu, X.-K.; Chen, S.-L.; Huang, D.-L.; Jiang, Z.-S.; Jiang, Y.-T.; Liang, L.-J.; Qin, L.-L. The Influence of Personality and Demographic Characteristics on Aggressive Driving Behaviors in Eastern Chinese Drivers. Psychol. Res. Behav. Manag. 2022, 15, 193–212. [Google Scholar] [CrossRef] [PubMed]
- Ley, H.; Sridharan, M. Integrating Non-Monotonic Logical Reasoning and Inductive Learning with Deep Learning for Explainable Visual Question Answering. Front. Robot. AI 2019, 6, 125. [Google Scholar] [CrossRef]
- Szalas, A. Decision-making support using non-monotonic probabilistic reasoning. In Proceedings of the Intelligent Decision, Technologies 2019: 11th KES International Conference on Intelligent Decision Technologies (KES-IDT 2019), Malta, Prague, 17–19 June 2019; Springer: Singapore, 2019; Volume 1, pp. 39–51. [Google Scholar]
- Raiyn, J.; Weidl, G. Naturalistic Driving Studies Data Analysis Based on a Convolutional Neural Network. In Proceedings of the 9th international Conference on Vehicle Technology and Intelligent Transportation Systems, Prague, Czech Republic, 26–28 April 2023; pp. 248–256, ISBN 978-989-758-652-1. [Google Scholar]
- L3pilot Automation Driving. Available online: https://l3pilot.eu/ (accessed on 14 November 2023).
- Raiyn, J. Classification of Road Traffic Anomaly Based on Travel Data Analysis. Int. Rev. Civ. Eng. 2021, 12. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description | Symbol |
|---|---|---|
| Min_ax | Minimum longitudinal acceleration | min(ax) |
| Max_ax | Maximum longitudinal acceleration | max(ax) |
| SD_ax | StDEV of longitudinal acceleration | sd(ax) |
| SD_ay | StDEV of lateral acceleration | sd(ay) |
| Mean_v | Mean speed | m(v) |
| SD_v | Standard deviation of speed | sd(v) |
| Max_abs_ay | Maximum absolute lateral acceleration | max(|ay|) |
| Max_v | Max speed | max(v) |
| Mean_pos_in_line | Mean position in lane | sd(Pos in lane) |
| Mean_THW | Mean time headway | m(THW) |
| NN | NBN | zeroR | J48 | RF | DT | |
|---|---|---|---|---|---|---|
| MAE | 0.1687 | 0.186 | 0.200 | 0.182 | 0.169 | 0.190 |
| RMSE | 0.290 | 0.306 | 0.316 | 0.301 | 0.292 | 0.307 |
| RAE | 84.033 | 93.07 | 93.07 | 90.676 | 84.288 | 95.049 |
| RRSE | 91.663 | 96.83 | 96.83 | 95.241 | 92.274 | 96.950 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raiyn, J.; Weidl, G. Predicting Autonomous Driving Behavior through Human Factor Considerations in Safety-Critical Events. Smart Cities 2024, 7, 460-474. https://doi.org/10.3390/smartcities7010018
Raiyn J, Weidl G. Predicting Autonomous Driving Behavior through Human Factor Considerations in Safety-Critical Events. Smart Cities. 2024; 7(1):460-474. https://doi.org/10.3390/smartcities7010018
Chicago/Turabian StyleRaiyn, Jamal, and Galia Weidl. 2024. "Predicting Autonomous Driving Behavior through Human Factor Considerations in Safety-Critical Events" Smart Cities 7, no. 1: 460-474. https://doi.org/10.3390/smartcities7010018
APA StyleRaiyn, J., & Weidl, G. (2024). Predicting Autonomous Driving Behavior through Human Factor Considerations in Safety-Critical Events. Smart Cities, 7(1), 460-474. https://doi.org/10.3390/smartcities7010018