
Impact of the Use of Electric Scooters from Shared Mobility Systems on the Users


Abstract
:1. Introduction
- The implementation of all shared mobility services, such as electric cars, bicycles, mopeds, or scooter-sharing services;
- The conducting of campaigns promoting the purchase of electric vehicles;
- The introduction of tax exemptions or the offering of additional privileges to the owners of electric vehicles;
- The spread of new mobility patterns with electric vehicles, including electric scooters, segways, unicycles, and electric skateboards.
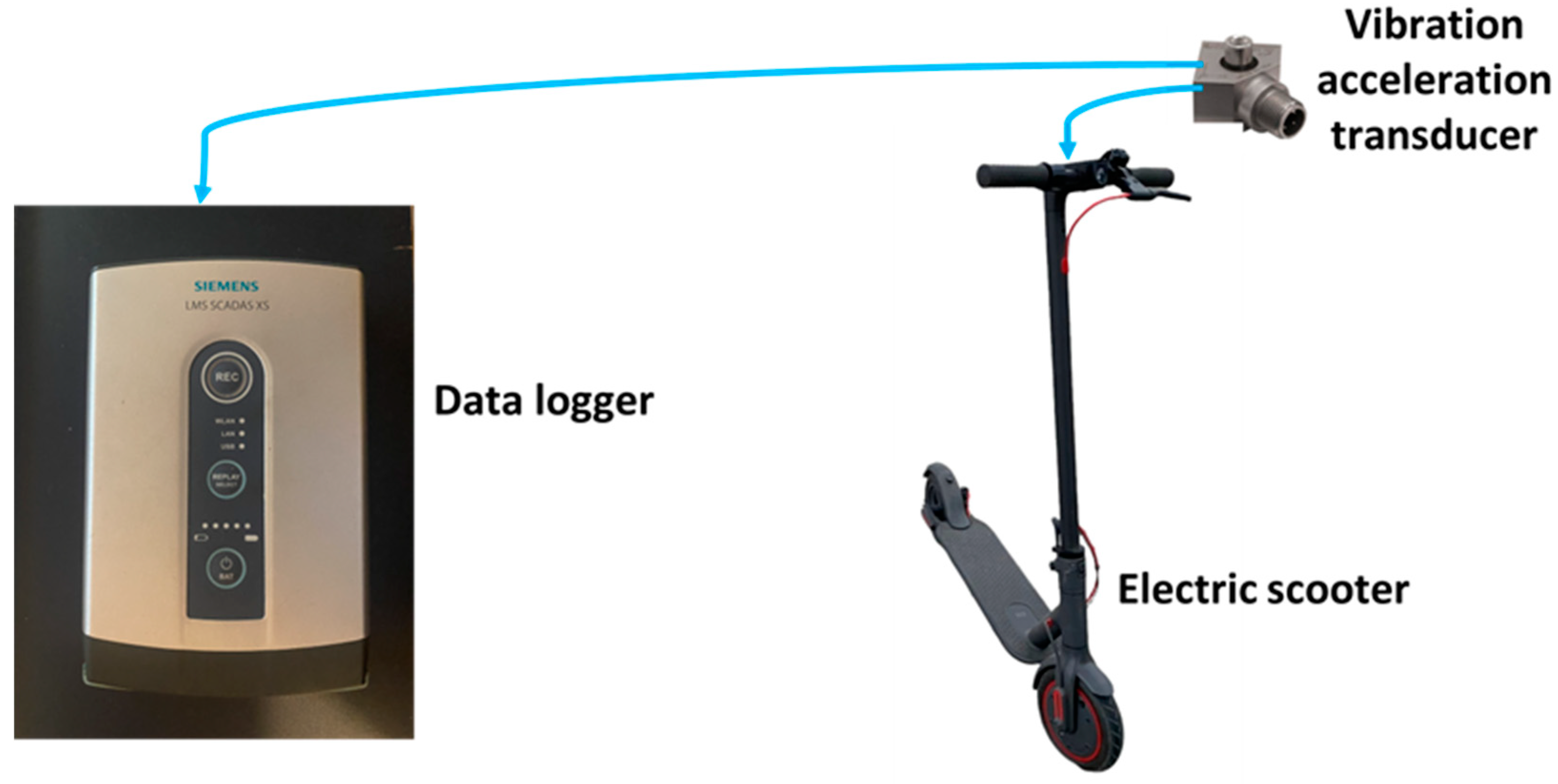
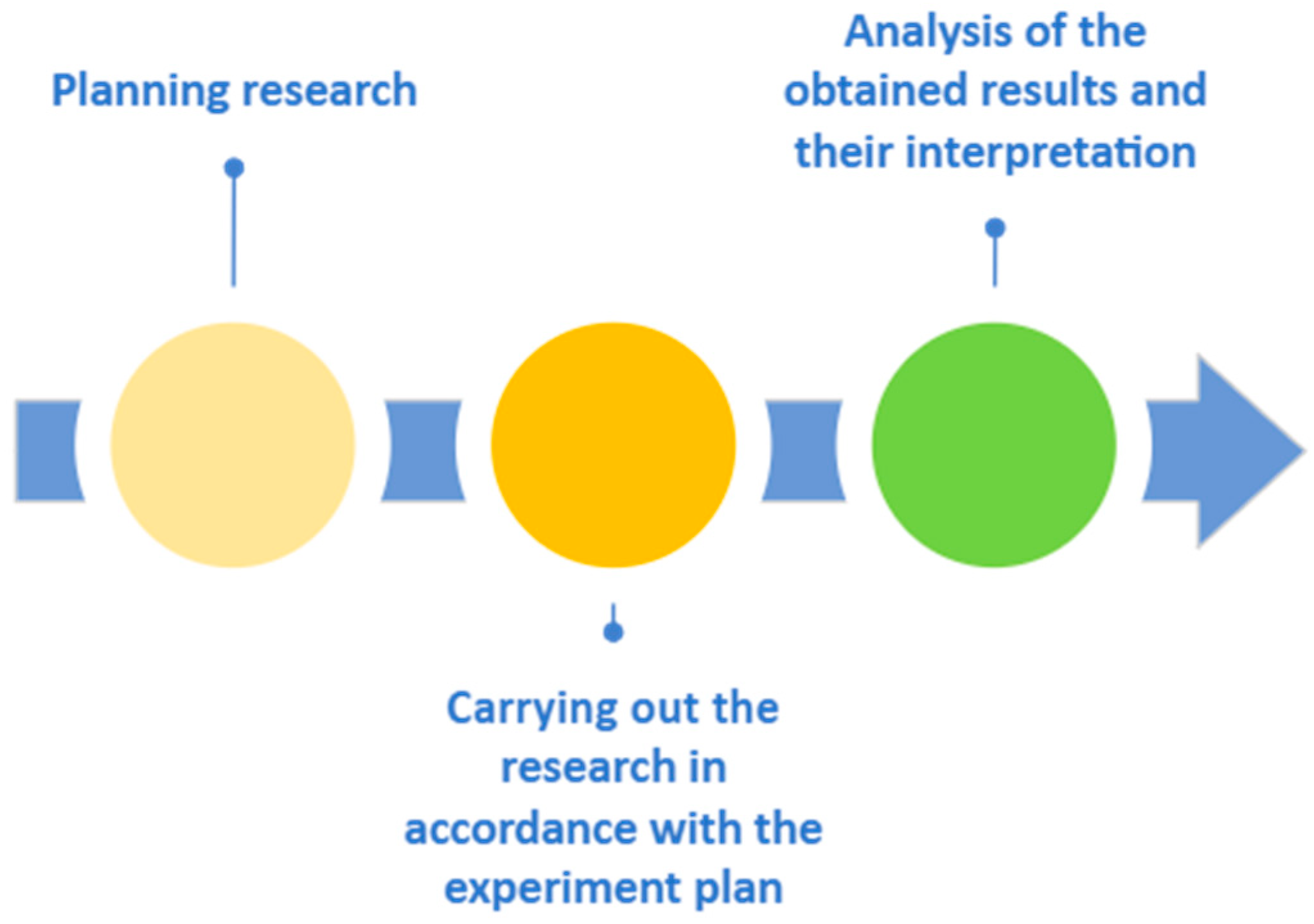
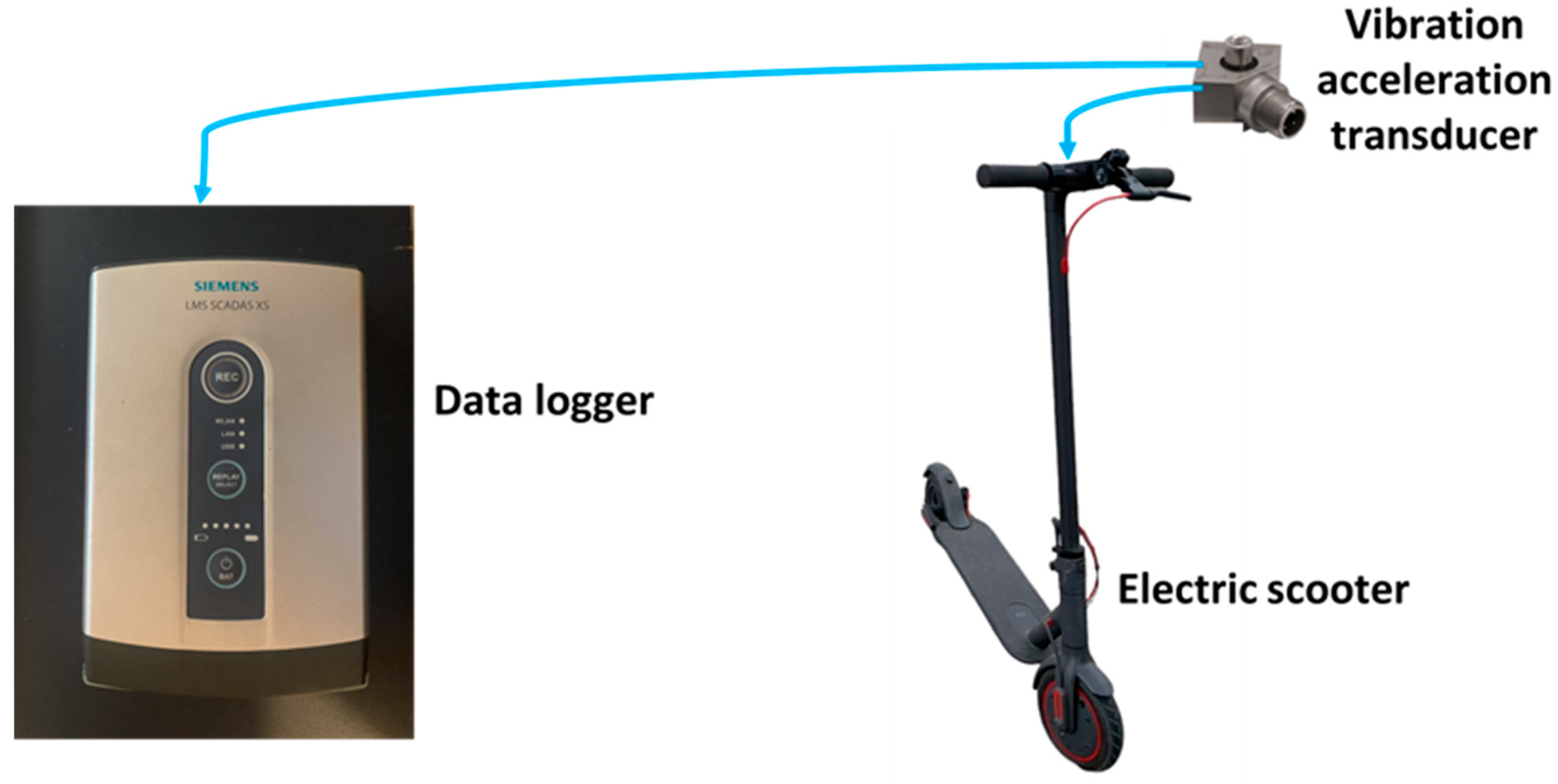
2. Materials and Methods
- -
- —results;
- -
- —the input factor in the normalized scale;
- -
- —regression coefficients.
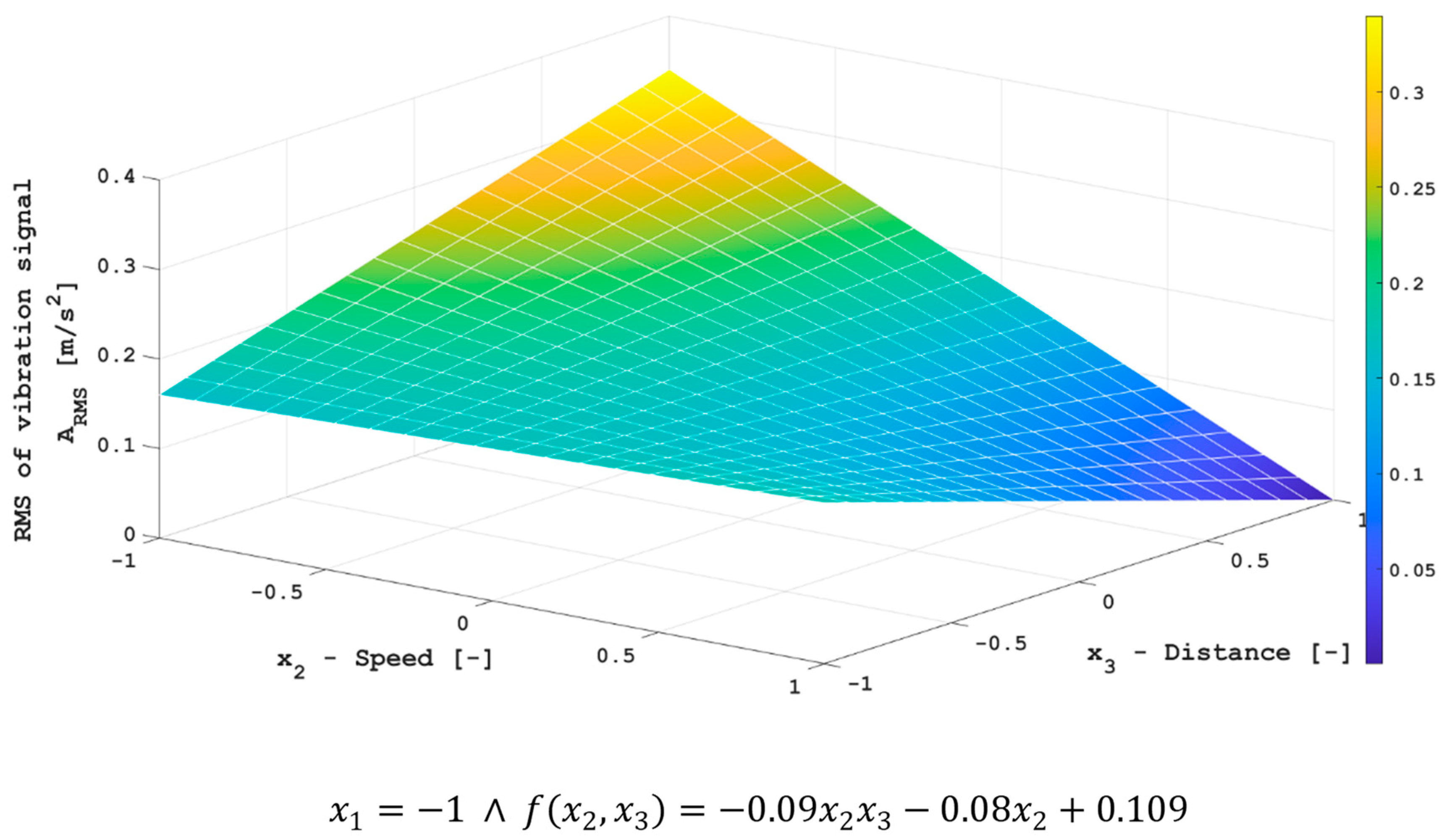
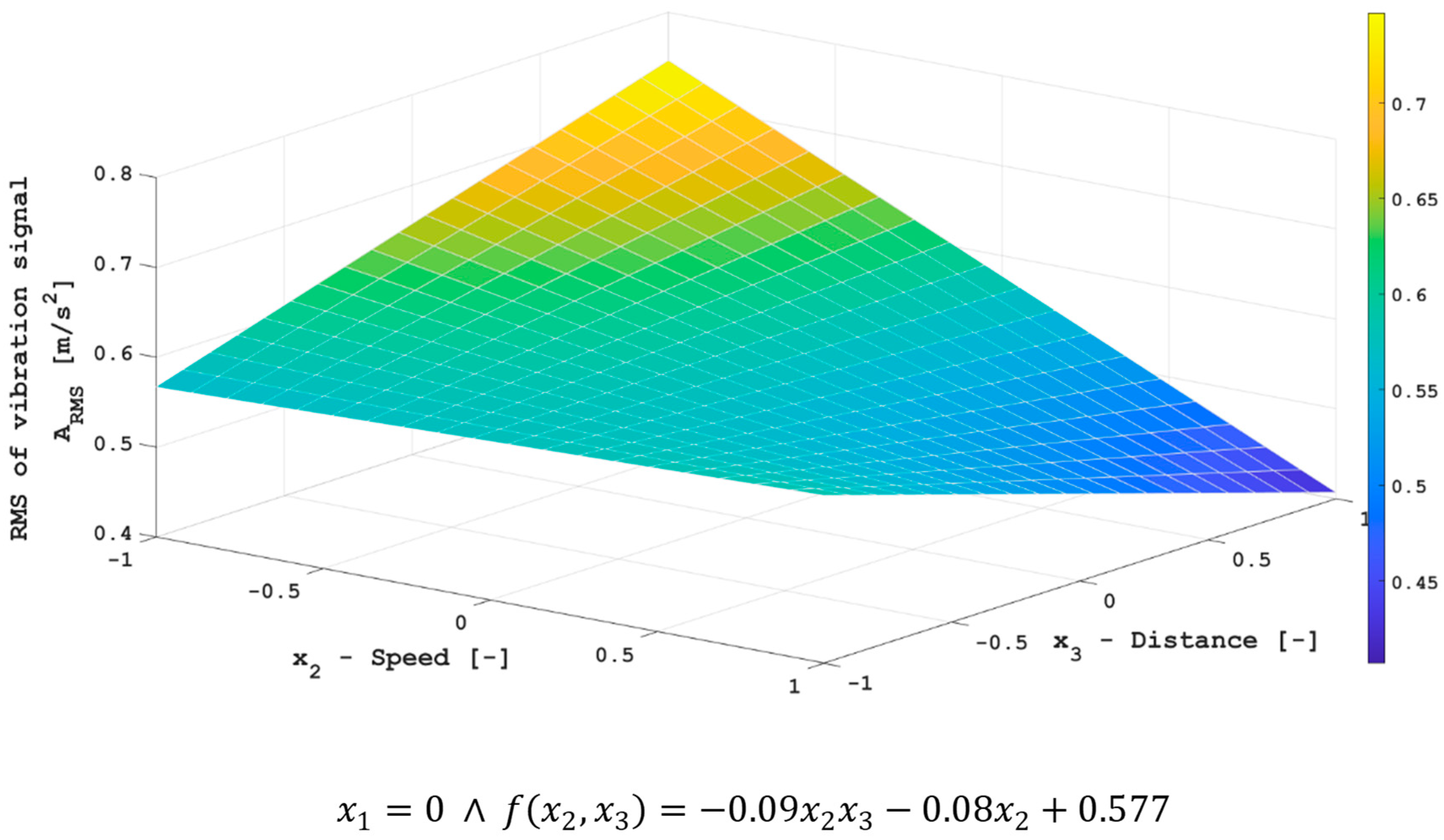
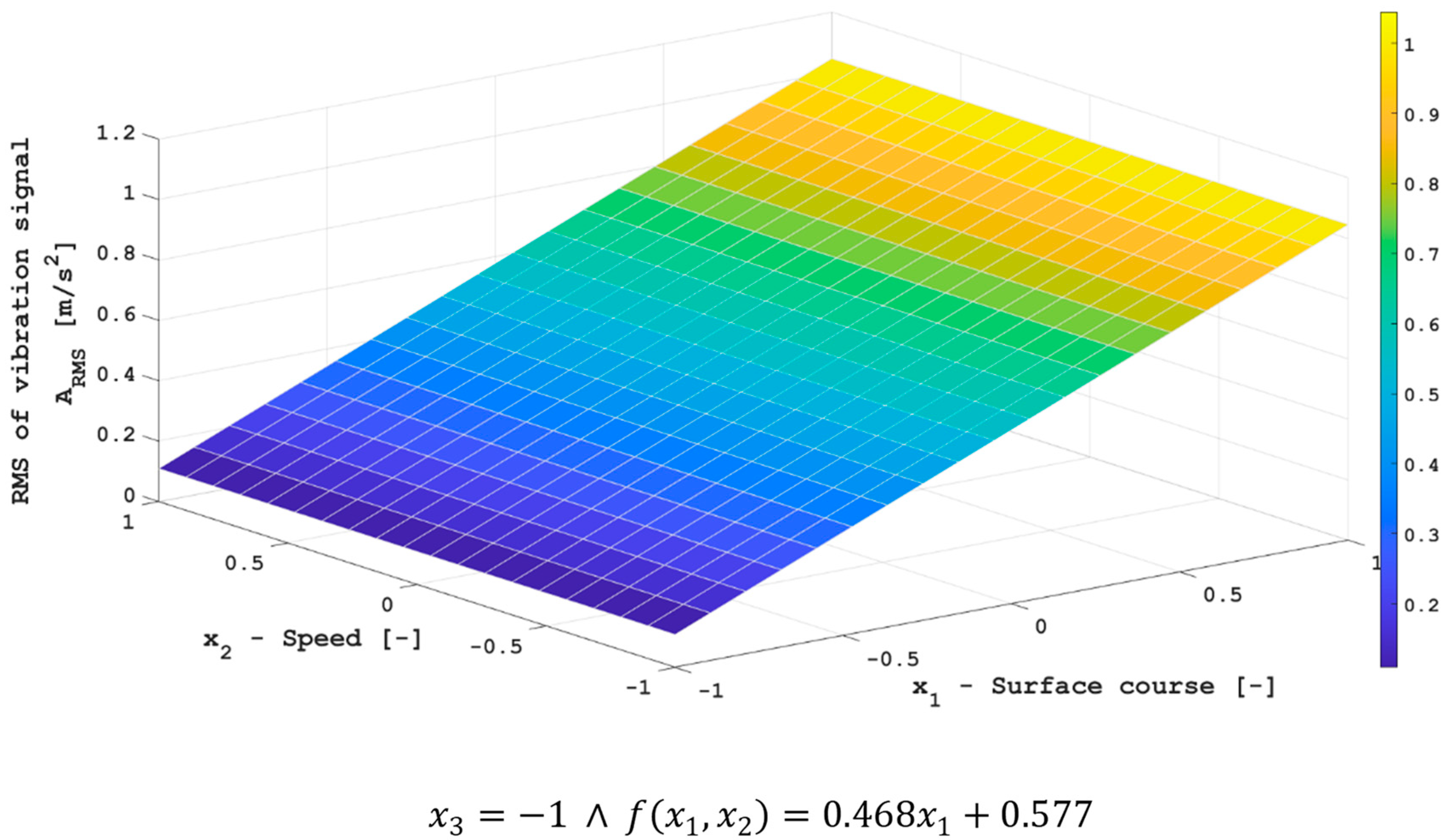
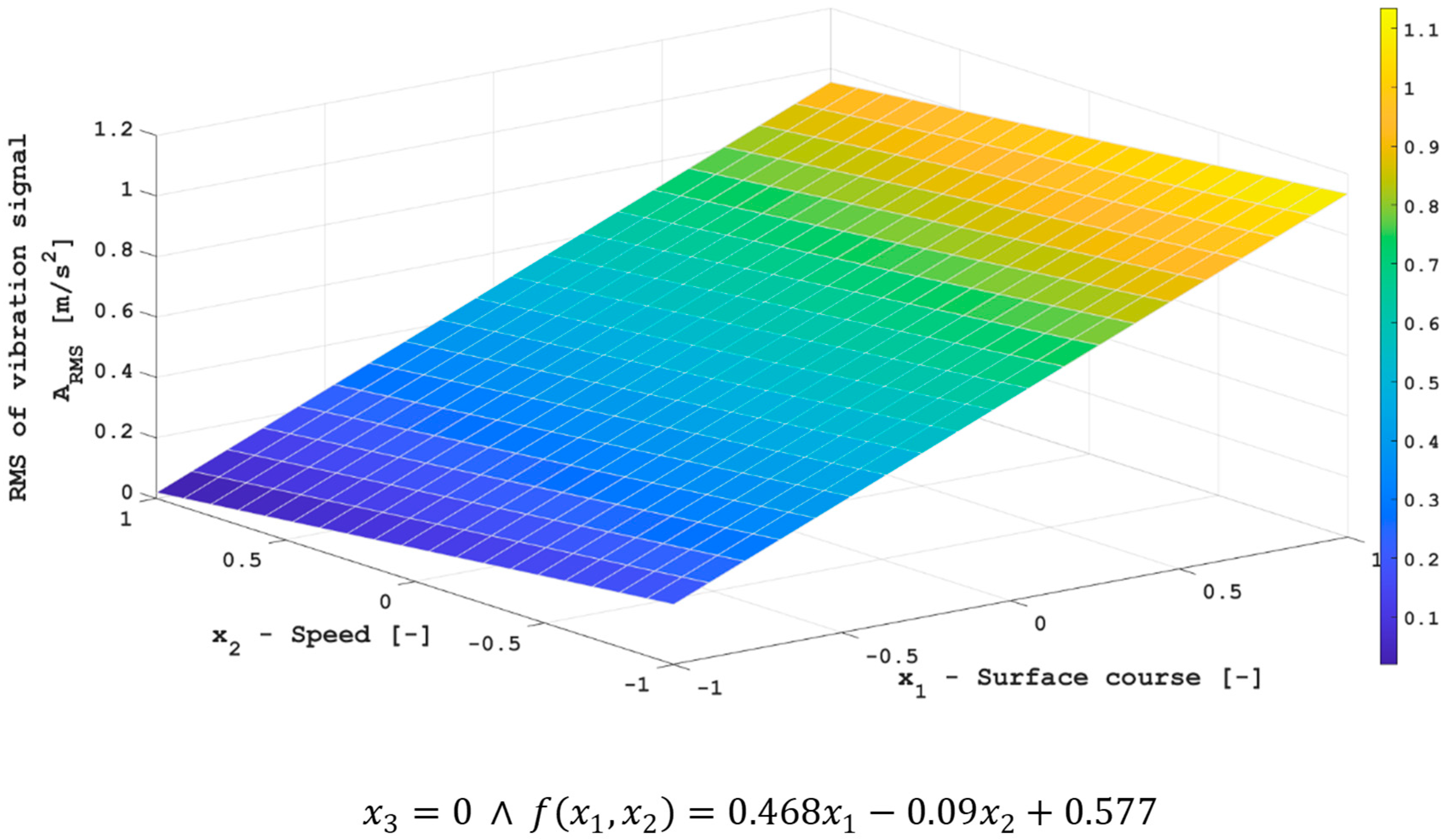
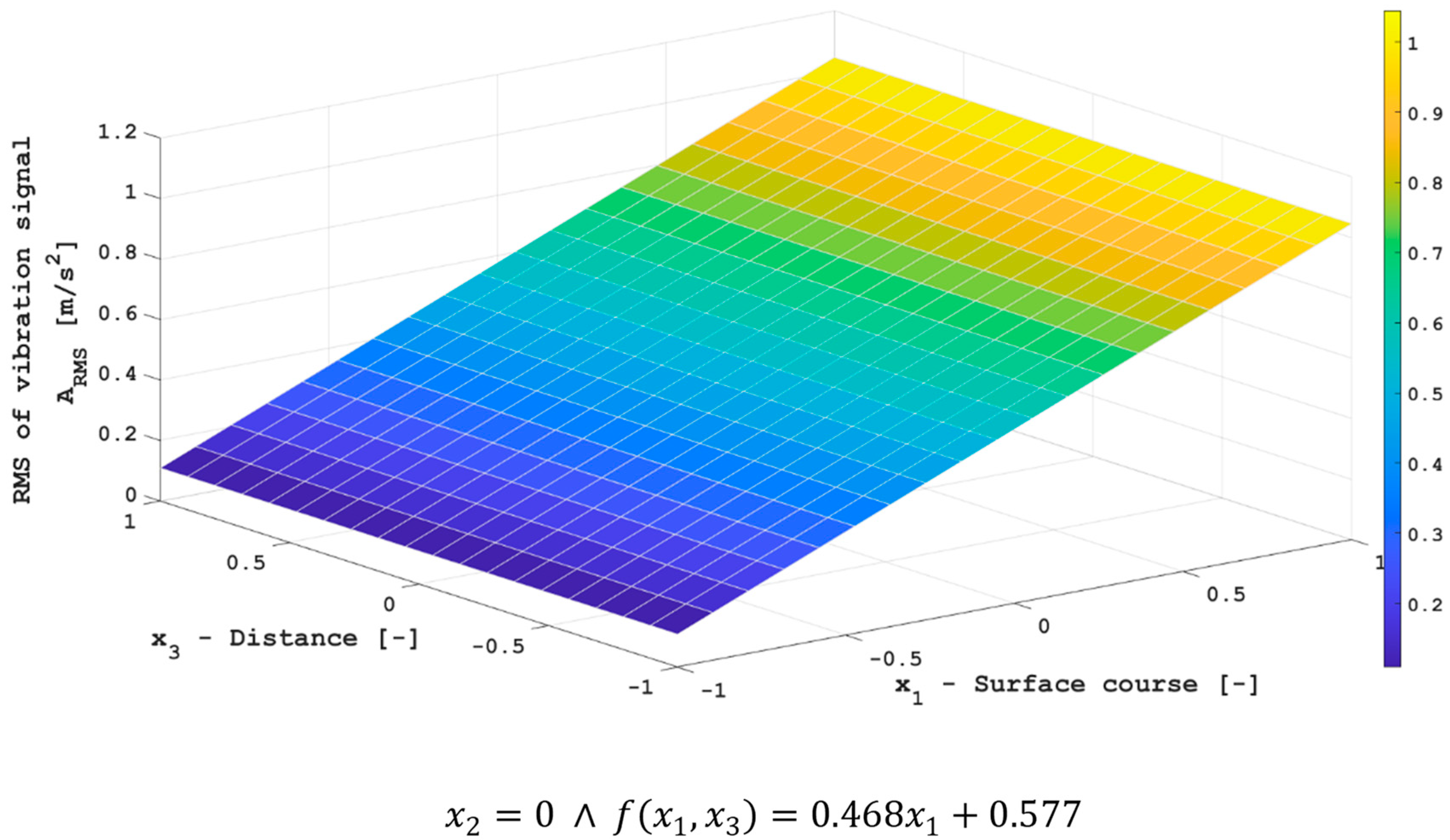
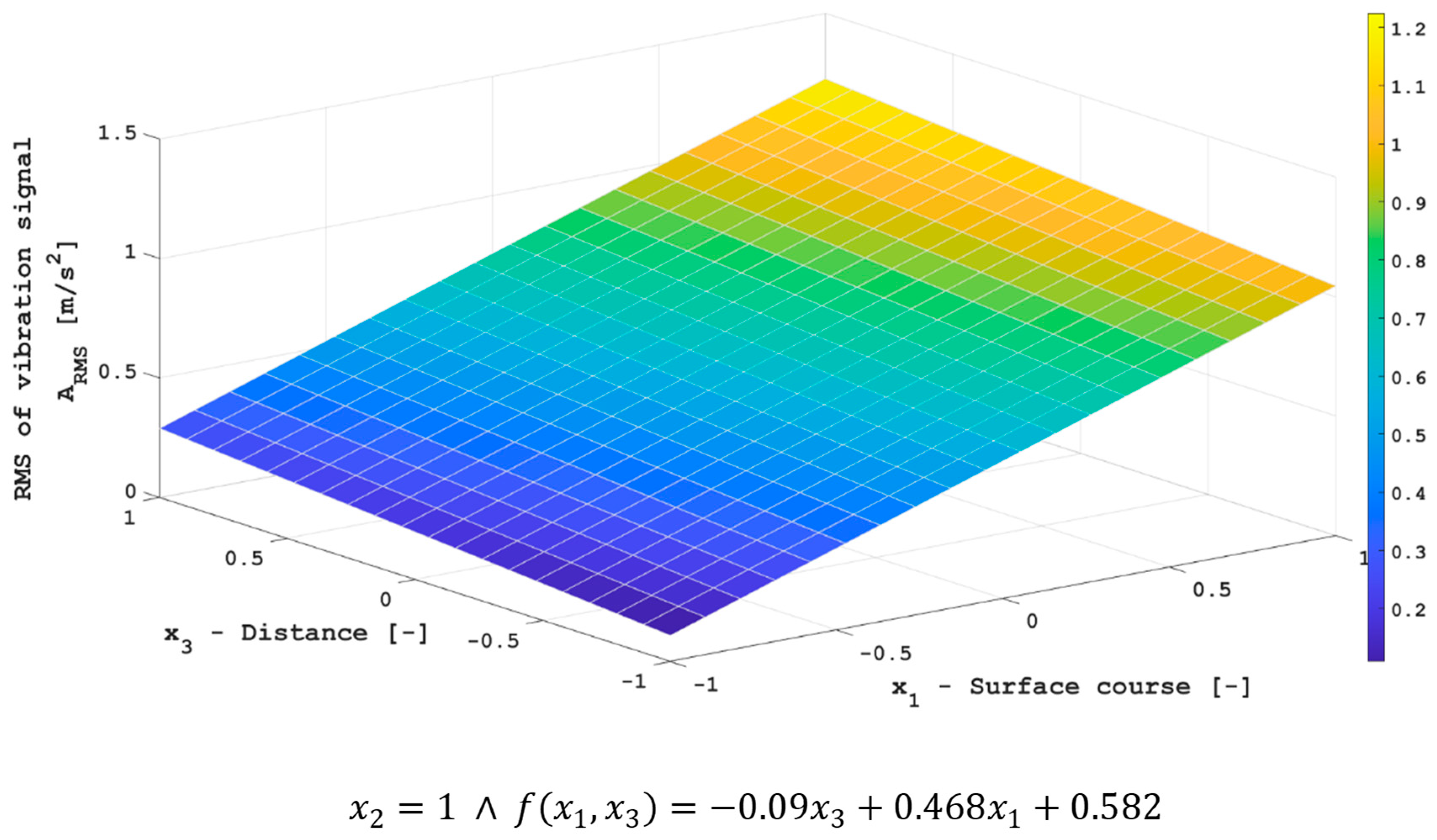
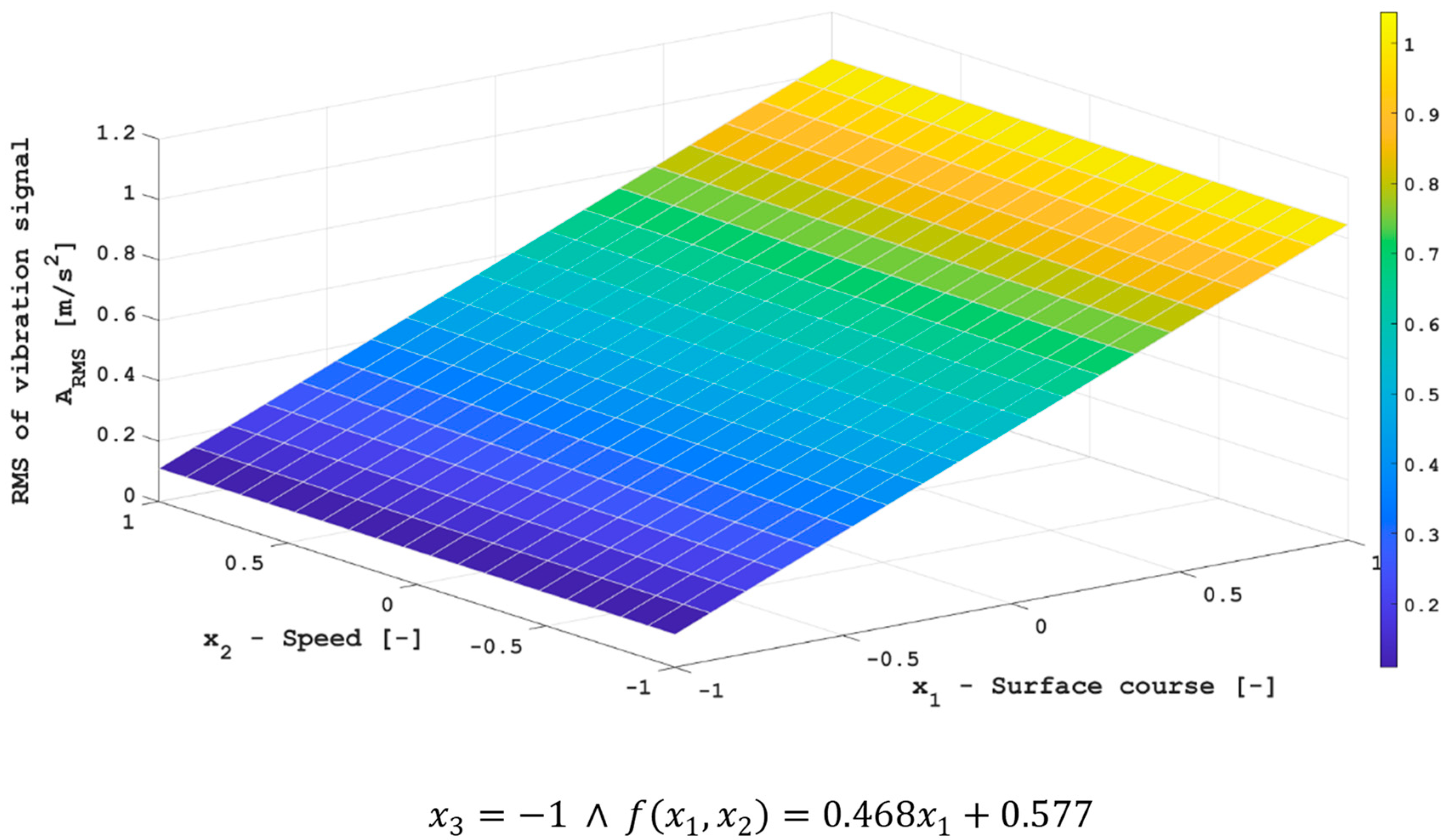
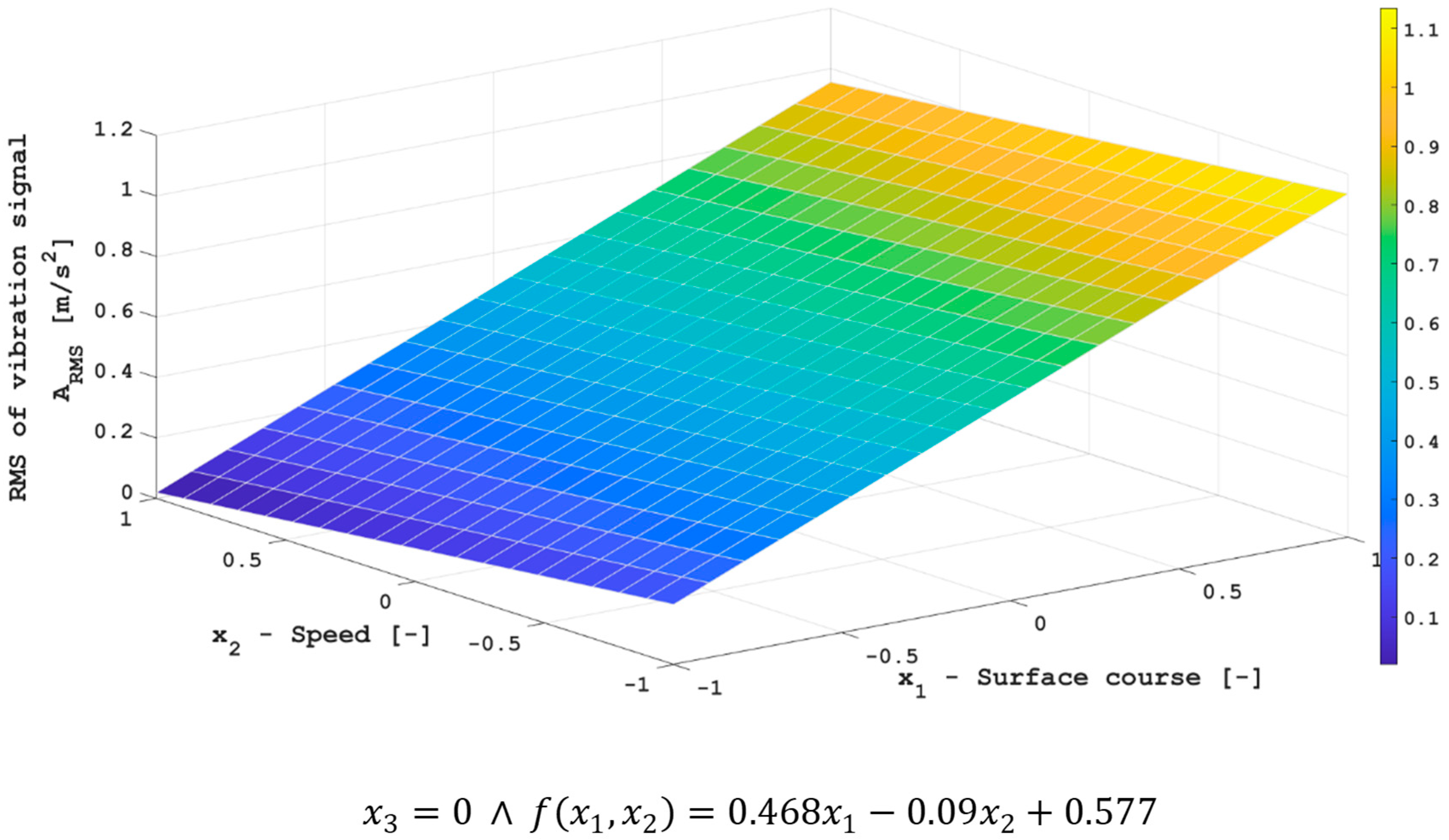
3. Results
4. Discussion
5. Conclusions
- Based on the waveforms of the vibration acceleration spectra of the measurements, the occurring vibration frequencies were determined, depending on the speed of movement of the scooter and the type of surface.
- The occurrence of low frequencies (f < 5 Hz) allowed us to describe a moving human as a rigid body.
- The tests that were carried out should be developed to include additional factors, i.e., tire pressure, driving position, or other road surfaces.
- Based on the waveforms of the vibration acceleration spectra of the measurements, the nuisance vibration frequencies occurring with different speeds of movement of the scooter and two types of surfaces were determined.
- Riding the scooter on paving stones, regardless of the speed of the scooter, is more burdensome for the human body, above all for the upper limbs, than traveling over an asphalt surface.
- It should be noted that in the case of low vehicle speeds, the phenomenon of close natural frequencies from various elements may occur, which will result in an increase in vibration acceleration.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qian, L.; Pang, Z.; Soopramanien, D. Influences of Car Sharing and Car License Plate Lottery Policy on Consumer Preference and Accessibility in Urban Mobility System: A Stated Choice Experiment in Beijing. J. Clean. Prod. 2022, 362, 132505. [Google Scholar] [CrossRef]
- Regulation (EU) 2019/631 of the European Parliament and of the Council. Available online: https://eur-lex.europa.eu/eli/reg/2019/631/2021-03-01 (accessed on 3 May 2022).
- European Climate Foundation (ECF). Annual Report 2012; European Climate Foundation: The Hague, The Netherlands, 2013. Available online: https://europeanclimate.org/resources/ecf-annual-report-2012/ (accessed on 3 May 2022).
- European Commission. Clean Power for Transport: A European Alternative Fuels Strategy Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions; European Commission: Brussels, Belgium, 2013. Available online: https://eurlex.europa.eu/LexUriServ/LexUriServ.do?uri=COM:2013:0017:FIN:EN:PDF (accessed on 3 May 2022).
- European Commission. A European Economic Recovery Plan. Communication from the Commission; European Commission: Brussels, Belgium, 2008. Available online: https://ec.europa.eu/economy_finance/publications/pages/publication13504_en.pdf (accessed on 3 May 2022).
- Wangsness, P.B.; Proost, S.; Rødseth, K.L. Optimal Policies for Electromobility: Joint Assessment of Transport and Electricity Distribution Costs in Norway. Util. Policy 2021, 72, 101247. [Google Scholar] [CrossRef]
- Echaniz, E.; Rodríguez, A.; Cordera, R.; Benavente, J.; Alonso, B.; Sañudo, R. Behavioural Changes in Transport and Future Repercussions of the COVID-19 Outbreak in Spain. Transp. Policy 2021, 111, 38–52. [Google Scholar] [CrossRef]
- Doody, B.J.; Schwanen, T.; Loorbach, D.A.; Oxenaar, S.; Arnfalk, P.; Svennevik, E.M.C.; Julsrud, T.E.; Farstad, E. Entering, Enduring and Exiting: The Durability of Shared Mobility Arrangements and Habits. Mobilities 2021, 17, 484–500. [Google Scholar] [CrossRef]
- Geronikolos, I.; Potoglou, D. An Exploration of Electric-Car Mobility in Greece: A Stakeholders’ Perspective. Case Stud. Transp. Policy 2021, 9, 906–912. [Google Scholar] [CrossRef]
- Wattana, B.; Wattana, S. Implications of Electric Vehicle Promotion Policy on the Road Transport and Electricity Sectors for Thailand. Energy Strategy Rev. 2022, 42, 100901. [Google Scholar] [CrossRef]
- The European Automobile Manufacturers’ Association. New Passenger Car Registrations, European Union. Available online: https://www.acea.auto/files/20210716_PRPC_2106_FINAL-1.pdf (accessed on 23 May 2022).
- Smart Ride Portal. E-Scooters in Poland. Available online: https://smartride.pl/Strefa_Danych/e-hulajnogi-sharing-polska-drugi-kwartal-2021-roku/ (accessed on 23 May 2022).
- UTO Polska Portal. The Market of e-Scooters. Available online: https://utopolska.pl/rynekdetaliczny-hulajnog-elektrycznych/ (accessed on 23 May 2022).
- Foissaud, N.; Gioldasis, C.; Tamura, S.; Christoforou, Z.; Farhi, N. Free-Floating e-Scooter Usage in Urban Areas: A Spatiotemporal Analysis. J. Transp. Geogr. 2022, 100, 103335. [Google Scholar] [CrossRef]
- Matyja, T.; Kubik, A.; Stanik, Z. Possibility to Use Professional Bicycle Computers for the Scientific Evaluation of Electric Bikes: Trajectory, Distance, and Slope Data. Energies 2022, 15, 758. [Google Scholar] [CrossRef]
- O’Hern, S.; Estgfaeller, N. A scientometric review of powered micromobility. Sustainability 2020, 12, 9505. [Google Scholar] [CrossRef]
- Gebhardt, L.; Ehrenberger, S.; Wolf, C.; Cyganski, R. Can Shared E-Scooters Reduce CO2 Emissions by Substituting Car Trips in Germany? Transp. Res. Part D Transp. Environ. 2022, 109, 103328. [Google Scholar] [CrossRef]
- Sanders, R.L.; da Silva Brum-Bastos, V.; Nelson, T.A. Insights from a Pilot Investigating the Impacts of Shared E-Scooter Use on Physical Activity Using a Single-Case Design Methodology. J. Transp. Health 2022, 25, 101379. [Google Scholar] [CrossRef]
- Wang, K.; Qian, X.; Fitch, D.T.; Lee, Y.; Malik, J.; Circella, G. What Travel Modes Do Shared E-Scooters Displace? A Review of Recent Research Findings. Transp. Rev. 2022, 1, 1–27. [Google Scholar] [CrossRef]
- Öztaş Karlı, R.G.; Karlı, H.; Çelikyay, H.S. Investigating the Acceptance of Shared E-Scooters: Empirical Evidence from Turkey. Case Stud. Transp. Policy 2022, 10, 1058–1068. [Google Scholar] [CrossRef]
- Leurent, F. What Is the Value of Swappable Batteries for a Shared E-Scooter Service? Res. Transp. Bus. Manag. 2022, 43, 100843. [Google Scholar] [CrossRef]
- Lin, M.-D.; Liu, P.-Y.; Yang, M.-D.; Lin, Y.-H. Optimized Allocation of Scooter Battery Swapping Station under Demand Uncertainty. Sustain. Cities Soc. 2021, 71, 102963. [Google Scholar] [CrossRef]
- Kazemzadeh, K.; Sprei, F. Towards an Electric Scooter Level of Service: A Review and Framework. Travel Behav. Soc. 2022, 29, 149–164. [Google Scholar] [CrossRef]
- Brezovec, P.; Hampl, N. Electric Vehicles Ready for Breakthrough in MaaS? Consumer Adoption of E-Car Sharing and E-Scooter Sharing as a Part of Mobility-as-a-Service (MaaS). Energies 2021, 14, 1088. [Google Scholar] [CrossRef]
- Liazos, A.; Iliopoulou, C.; Kepaptsoglou, K.; Bakogiannis, E. Geofence Planning for Electric Scooters. Transp. Res. Part D Transp. Environ. 2022, 102, 103149. [Google Scholar] [CrossRef]
- The Role of Micro-Mobility in MaaS: First-Hand Insights from TIER Mobility. Available online: https://www.intelligenttransport.com/transport-articles/128716/micro-mobility-maas-tier-mobility/ (accessed on 23 May 2022).
- Figlus, T.; Szafraniec, P.; Skrúcaný, T. Methods of Measuring and Processing Signals during Tests of the Exposure of a Motorcycle Driver to Vibration and Noise. Int. J. Environ. Res. Public Health 2019, 16, 3145. [Google Scholar] [CrossRef]
- Bozzi, A.D.; Aguilera, A. Shared E-Scooters: A Review of Uses, Health and Environmental Impacts, and Policy Implications of a New Micro-Mobility Service. Sustainability 2021, 13, 8676. [Google Scholar] [CrossRef]
- Dias, G.; Arsenio, E.; Ribeiro, P. The Role of Shared E-Scooter Systems in Urban Sustainability and Resilience during the Covid-19 Mobility Restrictions. Sustainability 2021, 13, 7084. [Google Scholar] [CrossRef]
- Li, A.; Zhao, P.; Liu, X.; Mansourian, A.; Axhausen, K.W.; Qu, X. Comprehensive Comparison of E-Scooter Sharing Mobility: Evidence from 30 European Cities. Transp. Res. Part D Transp. Environ. 2022, 105, 103229. [Google Scholar] [CrossRef]
- Dąbrowski, Z.; Dziurdź, J. New concept of using coherence function in digital signal analysis. Mach. Dyn. Probl. 2007, 31, 25–31. [Google Scholar]
- Cioch, W.; Knapik, O.; Leśkow, J. Finding a frequency signature for a cyclostationary signal with applications to wheel bearing diagnostics. Mech. Syst. Signal Process. 2013, 38, 55–64. [Google Scholar] [CrossRef]
- Engel, Z. Vibration in Technology; Zakład Narodowy im. Ossolińskich: Wrocław, Poland, 1981. [Google Scholar]
- Nader, M. Vibration and Noise in Transport; Oficyna Wydawnicza Politechniki Warszawskiej: Warsow, Poland, 2016. [Google Scholar]
- Griffin, M.J. Handbook of Human Vibration; Academic Press Ltd.: London, UK, 1990. [Google Scholar]
- Munera, M.; Chiementin, X.; Crequy, S.; Bertucci, W. Physical Risk Associated with Vibration at Cycling. Mech. Ind. 2014, 15, 535–540. [Google Scholar] [CrossRef]
- Kåsin, J.I.; Kjellevand, T.O.; Kjekshus, J.; Nesheim, G.B.; Wagstaff, A. CT Examination of the Pericardium and Lungs in Helicopter Pilots Exposed to Vibration and Noise. Aviat. Space Environ. Med. 2012, 83, 858–864. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample No. | x1 | x2 | x3 |
|---|---|---|---|
| 1 | −1 | −1 | 1 |
| 2 | 1 | −1 | −1 |
| 3 | −1 | 1 | −1 |
| 4 | 1 | 1 | 1 |
| 5 | −1 | 0 | 0 |
| 6 | 1 | 0 | 0 |
| 7 | 0 | −1 | 0 |
| 8 | 0 | 1 | 0 |
| 9 | 0 | 0 | −1 |
| 10 | 0 | 0 | 1 |
| 11 | 0 | 0 | 0 |
| Sample No. | Surface Course (x1) | Speed [km/h] (x2) | Distance [km] (x3) | ARMS [m/s2] |
|---|---|---|---|---|
| 1 | asphalt | 10 | 5 | 0.192 |
| 2 | paving | 10 | 1 | 1.136 |
| 3 | asphalt | 20 | 1 | 0.147 |
| 4 | paving | 20 | 5 | 0.705 |
| 5 | asphalt | 15 | 3 | 0.167 |
| 6 | paving | 15 | 3 | 1.104 |
| 7 | mixed surface (paving and asphalt) | 10 | 3 | 0.578 |
| 8 | mixed surface (paving and asphalt) | 20 | 3 | 0.397 |
| 9 | mixed surface (paving and asphalt) | 15 | 1 | 0.610 |
| 10 | mixed surface (paving and asphalt) | 15 | 5 | 0.547 |
| 11 | mixed surface (paving and asphalt) | 15 | 3 | 0.555 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kubik, A. Impact of the Use of Electric Scooters from Shared Mobility Systems on the Users. Smart Cities 2022, 5, 1079-1091. https://doi.org/10.3390/smartcities5030054
Kubik A. Impact of the Use of Electric Scooters from Shared Mobility Systems on the Users. Smart Cities. 2022; 5(3):1079-1091. https://doi.org/10.3390/smartcities5030054
Chicago/Turabian StyleKubik, Andrzej. 2022. "Impact of the Use of Electric Scooters from Shared Mobility Systems on the Users" Smart Cities 5, no. 3: 1079-1091. https://doi.org/10.3390/smartcities5030054
APA StyleKubik, A. (2022). Impact of the Use of Electric Scooters from Shared Mobility Systems on the Users. Smart Cities, 5(3), 1079-1091. https://doi.org/10.3390/smartcities5030054