1. Introduction
The ITS enhanced the well-being and driving surroundings with the integration of information technology in transport systems. Thus, it would be a great opportunity if vehicles could communicate directly with each other, provided that they are within range. On the other hand, they must react as a relay to reach far destinations, hence the VANET network.
Today, many research works have taken interest in Ad Hoc wireless networks due to their low cost when there is a need to communicate in the absence of infrastructure. To improve road safety [
1] or ensure internet access for passengers, road safety systems have emerged to ensure exchange inter-vehicle and fixed vehicle infrastructure information in a wireless network. Thousands of researchers [
2,
3,
4] have been interested in this area and have tried to adapt the routing protocol for MANET to the VANET network because most traditional routing protocols of MANETs cannot directly apply to VANET. To reach this goal, we must improve the communication between vehicles to ensure information transmission by taking into account the VANET features. In other words, we must improve the routing process.
Routing protocols must ensure low control overhead [
5], low complexity, and must enhance broadcast capability. Following the criteria of the urban environment, the design of a routing protocol in VANET to ensure vehicle-to-vehicle (V2V) communication meets other challenges [
6]. In particular, the high mobility of vehicles in this network requires adapting routing information to frequent changes in the topology. Therefore, we must reduce the convergence time for routing algorithms to find the path from the source to the destination that can enhance the end-to-end delay and minimize the latency time to discover neighbors.
It is required to ensure communication integrity owing to the nature of information, which can reduce accidents and save lives, hence the importance of the packet delivery ratio. In addition, the end-to-end delay constraint of real-time applications and the retransmissions used for error control should be delay-constrained. The aim of this research is to improve the end-to-end delay of our network and its packet delivery ratio. Otherwise, the information will become obsolete.
Thus, this paper contributes to the following areas:
We start by presenting the theoretical framework that includes a literature review of the routing protocol in the VANET environment, which is part of the smart cities challenges.
We present an efficient implementation of the Advanced Greedy Forwarding algorithm “GFA”, which overcomes the problem of stationary vehicles. The source node forwards incoming messages to a selected node according to a score based on its position and speed.
We study the benefits of GFA compared to GF in terms of the end-to-end delay and packet delivery ratio using the NS3 simulator.
We improve the OLSR protocol by introducing a GFA mechanism to collect information that is used in the proposed score to select the best way to the destination.
We compare our proposed Greedy-OLSR (G-OLSR) to OLSR and we note that our protocol outperforms OLSR in terms of the end-to-end delay and packet delivery ratio.
The rest of this paper is organized as follows. In the next section, we discuss the taxonomy of routing protocols for the VANET environment, their advantages, and their limitations, and related work is briefly presented. This is followed by the proposed routing strategy in the following section. The experimental results are presented in the next section. Finally, we conclude with a perspective.
2. Routing Protocols in VANET
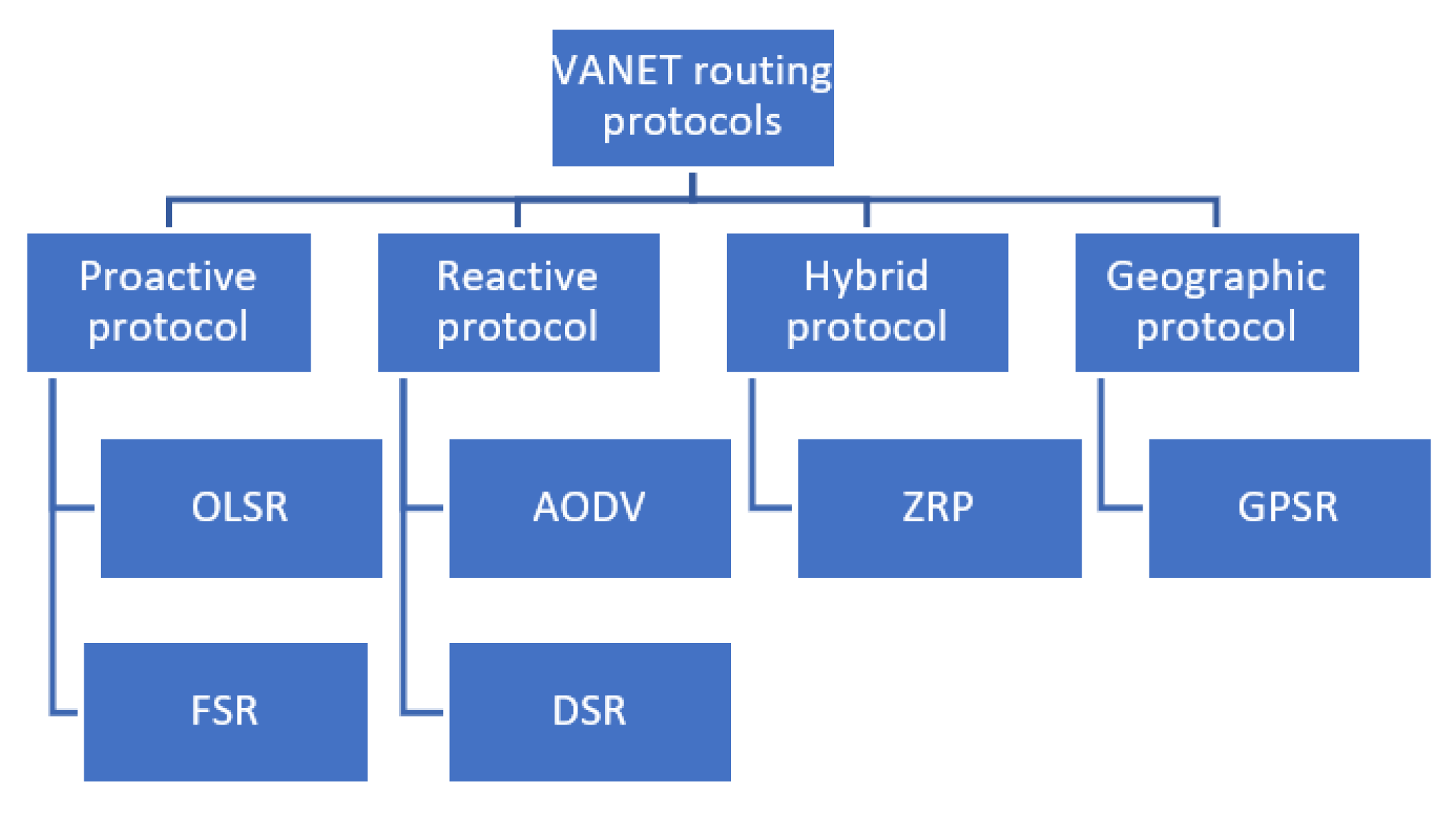
The routing mechanism is a process that finds a way by selecting the intermediate node to reach the destination and allows the source to send a packet to the destination. The routing protocols for VANET can be divided into two principal categories (
Figure 1) [
7]. The first category of protocols is the flat routing, which can be divided in two subsets: proactive protocols in which the route already exists and periodically updated, and reactive protocols in which the route is only searched on demand.
The second category of routing protocols provides routing in large networks, covering a large geographic area, called geographic or hierarchical routing.
For hierarchical routing, the network is divided into small groups called clusters [
8]. The communication is performed on the same group level if the destination is at the same cluster, which decreases the load on the network and optimizes broadcasting. The packet is sent only between clusters if the destination exists in another. Geographic routing is based on the geographic location of each vehicle.
Proactive protocols already have the path between nodes and maintain it by sending a periodic message; OLSR (Optimized Link State Routing Protocol) is one of the protocols that use this approach [
9]. OLSR selects a node called MultiPoint Relays (MPRs) that allow each node in the network to reach its two-hop neighbors. This routing mechanism reduces the overload due to the control routing messages sent, by ensuring a selective sending to form a route. Only nodes elected as MPRs can forward broadcast messages during communication.
Advantages:
Disadvantages:
FSR (Fisheye State Routing) [
10] is a proactive protocol. For this protocol, the update is based on distance; the next node receives fewer local topology updates; it adopts the fisheye mechanism; the object distinction deteriorates while moving away from the central point. FSR uses this feature to maintain precise routes for the neighborhood near the node (
Figure 2).
Advantages:
FSR reduces the bandwidth consumption, because it exchanges routing information for partial update with neighbors only.
Reduces routing overheads.
Disadvantages:
No modification of the routing table, even if there is a link failure, because it does not trigger a control message for the failure link.
Poor performance in small ad hoc networks.
Poor information for far nodes.
When the size of the network increases, the complexity of storage and the processing overhead of the routing table increase and become more complex.
Lack of information for established route.
As for the reactive protocol, there is no route in the memory. It is defined only on demand, and this mechanism is adopted in the AODV protocol [
11] (Ad-hoc On-demand Distance Vector) DSR [
12] (Dynamic Source Routing). The procedure of route research is invoked on demand. The advantage of this category of routing protocols is the minimization of the network traffic, based on the query and reply message. AODV uses as an algorithm of the basic on-demand mechanism of DSR Route Discovery and Route Maintenance, and DSDV (Destination-Sequenced Distance Vector) [
13] uses hop-by-hop routing, sequence numbers, and periodic beacons.
Advantages:
The update can be performed using the sequence number assigned to each destination.
The need for memory and route redundancy can be reduced.
The protocol can be applied to large networks.
Disadvantages:
It allows more time to configure the connection and to initialize communication to establish a route compared to other approaches.
It can cause inconsistencies in the route if the intermediate nodes contain the old entries.
There may be various response packets, which causes network overload, for a single route request.
It has an excessive consumption of bandwidth.
Hybrid protocols combine and use the advantage of the reactive and proactive protocol. As with the ZRP protocol (Zone Routing Protocol) [
14], the principle is to divide the network into two areas, to minimize the number of re-broadcast nodes in each area. Information is exchanged proactively inside the area and reactively outside.
Advantages:
Disadvantages:
As for the geographic protocol, the principal mechanism is the Greedy Perimeter Stateless Routing (GPSR) [
15], which is a routing protocol based on the position node, so we assume that each node already knows its neighbors in a table saving all positions. Each node sends a "beacon" message containing its ID with the actual position. The node is deleted from the table if we do not receive any beacon message after a while. The GPSR protocol uses greedy forwarding or the perimeter forwarding mechanism, according to the traffic density, to transmit the packet to the destination.
Advantages:
Disadvantages:
Fake routes can exist in the neighborhood table if mobility is high due to latency.
The packet header is never updated by the intermediate nodes in the transfer process, hence the risk of the packet being lost due to mobility.
In
Table 1, we summarize the comparison between the protocols described previously:
3. Literature Review
There is a lot of work in the literature comparing routing protocols in VANET, and the need of this comparative study is very interesting to enhance the communication between vehicles and to avoid the risky situations for drivers and passengers.
SALLUM et al. [
9] discussed and compared OLSR, AODV, and DSDV. They concluded that OLSR is the best protocol, which gives the best performance in the VANET scenario in the case of the packet delivery ratio and end-to-end delay, especially when the density of vehicles and speed increase. The simulation is performed under the NS3 simulator, and the mobility and movement nodes are created by BonnMotion.
The paper [
16] compared between OLSR, AODV, GPSR, and GPCR using SUMO to extract mobility on a real map and NS3 as a network simulator, varying the number of vehicles. Their results prove that the OLSR is better in the case of packet delivery ratio, whereas, in the case of the end-to-end delay, GPSR presents the best performance due to the use of the greedy forwarding method.
The authors in [
17] compared the AODV, DSDV, DSR, and GPSR routing protocols in the VANET environment, using NS2.35. The best performance is obtained for the GPSR protocol in the case of end-to-end delay, whereas the AODV protocol is better in the case of the packet delivery ratio.
Alnabhan et al. (2020) [
18] presented the improvement of the GPSR protocol called AGPSR. This improvement is based on the greedy forwarding mechanism that makes the GPSR protocol more efficient in the event of a delay in E2E and the packet delivery ratio, hence the importance of the greedy forwarding mechanism.
Kumar et al. (2020) [
19] compared OLSR and GPSR, and they concluded that OLSR outperforms GPSR in terms of PDR and throughput.
All works previously presented prove that the OLSR presents the high and best performance in the case of end-to-end delay and packet delivery ratio. In addition, the integration of the greedy forwarding mechanism makes the routing protocol more efficient than the classic version.
4. Proposed Work
The amelioration proposed will make the OLSR routing protocol suitable for vehicle networks in an urban environment. The objective is to route the data step-by-step by taking into account the urban structure streets. Our proposition has two features:
- (i)
An improved greedy approach “GFA” to route packets between two junctions in order to collect the information of this segment delimited by source and candidate intersections, as shown in
Figure 3 composed of several intersections A, B, C, D, and E.
- (ii)
Select the intersection to reach the destination.
Therefore, the protocol starts by collecting information of two segments delimited by source intersection and the two candidate intersections A and C. Using this collected information, the vehicle determines all candidate intersections to select the right one. Then, owing to the collected information using GFA, we provide a score for each intersection. Therefore, we apply Dijkstra’s algorithm in order to identify the way in which to reach the destination.
Contrary to other protocols, the source vehicle elects the right intersection sequence to reach the destination.
4.1. Optimization of OLSR for VANET Communication
Given the results of the last analysis, the OLSR protocol presents the best performance. The integration of the “greedy forwarding” will enhance the protocol because it reduces the end-to-end delay [
20].
Greedy forwarding is based on proximity metrics by distance calculation. This greedy mode refers to the selection of the nearest neighbor to the destination as the next hop for the transfer of a packet.
In this work, we improve the greedy forwarding mechanism [
21] to choose the best vehicle and quickly reach the destination. We add a score to make it more efficient and precise.
We start by presenting the communication in the vehicular system, as shown in the following
Figure 4:
To adapt the OLSR protocol to the VANET environment and to be more efficient, we add the advanced greedy forwarding mechanism in selecting the step by a score explained in the following paragraph.
The advanced Greedy Forwarding Mechanism "GFA" [
22] takes into account the distance between the source vehicle and the intermediate vehicle, which is a candidate to be considered as a relay, the candidates’ speed of the vehicles of the candidates, and their geographical positions. The concept of score is attributed to each node in
Figure 5:
The source selects the node with the smaller score
:
where
is the time to reach the range
of the vehicle source “S”, and
is the moment when the vehicle "Vhi" is in xi position with the speed
at time ti.
The classic greedy forwarding does not take into account whether the vehicle is moving or not, so to accelerate the communication, we add the speed of the vehicle in our amelioration, using the rule that the furthest node will not necessarily be the fastest and best for the transfer.
The algorithm using the previous score is as follows:
The node Ni receives the packet,
If a node or group of nodes are within the reach of node Ni,
Then select the node that has the smallest T score,
Otherwise, save the package to find a node in its scope and select the one with the lowest score tp,
Repeat these steps until to reach D (destination).
Analyzing this algorithm, we note that GFA reacts better than the GF because of the score . If the difference between the speeds of candidate nodes does not influence the score in such a way that the score of the furthest node is lower than that of another closer node, GFA and GF have the same result.
To validate our proposition compared to the classic greedy forwarding method, we choose the following model:
The study, performed in the following
Section 5, treats the particular case as shown in
Figure 6 when the elected vehicle by the Greedy forwarding mechanism is not efficient, because of its speed. Therefore, our proposition reacts positively in this case to improve the performance such as EED (End-to-End Delay) and PDR (Packet Delivery Ratio) of the network by verifying the speed of each node participating in the communication.
We execute GF and GFA to evaluate their performances in the case of end-to-end time for different distances and speeds between the candidate nodes.
In the following, the parameters are not chosen randomly but by considering the particular case from which our approach will be able to react better than the classic version. In another case, the two approaches give the same results.
4.2. Results and Analysis of GFA
4.2.1. Case 1
Table 2 shows the simulation parameters:
We vary Xa, the distance between A and S, from 50 m to Xb,
The simulation is performed in the NS3 simulator, and the result is shown in
Figure 7:
In this figure, we note that our approach gives a lower end-to-end delay, especially for high density. Therefore, the probability to find a faster and more appropriate node for data exchange is high because GFA finds a lot of possibilities and chooses the fastest node by using the score , which is not considered in the GF. In addition, GFA maintains the advantage of the GF mechanism for low density. Therefore, our "GF Ameliorated" acts positively compared to the classic version.
4.2.2. Case 2
We keep the same parameters used in the previous simulation but set Xa to 200 m and vary Xb from 130 m to Xa.
In
Figure 8, we summarize the simulation results:
In this case, we note that GFA gives a better performance than the GF mechanism until equalization when the distance between A and B increases to more than 60 m.
4.2.3. Case 3
In this case, we vary the speed of node B “Vb”. Therefore, we fix Xa = 150 m, Xb = 200 m, and Va = 60 km/h.
The end-to-end delay for the GF mechanism is very important for low speed. However, for GFA, the end-to-end delay remains practically stable and gives the best performance especially for low speed.
4.2.4. Case 4
In this case, we vary the speed of node B “Va”. Thus, we fix Xa = 150 m, Xb = 200 m, and Vb = 60 km/h.
Both GFA and GF give the same performance until the speed of nodes A increases to more than 50 km/h, so it can reach the destination as soon as possible. Therefore, our proposition switches to the node that has the highest speed.
4.2.5. Discussion
In all steps of the previous simulation, the GFA mechanism retains the advantages of GF and solves the problem of end-to-end delay divergence noted in the GF mechanism. The divergence is caused by a stationary vehicle. GFA considers the speed of each vehicle and prioritizes the mobile vehicles compared to stationary ones.
The reaction of GFA is noted when candidate vehicles are close and the speed of the one that is selected by GF is less than the speed of the closer vehicle to the source.
We note that GFA reacts better than GF because of the score , especially when the score of the closer vehicle is less than that of the further one.
GFA and GF have the same result, if the difference between the speeds of candidate nodes does not influence the score in such a way that the score of the furthest node is lower than that of another closer node.
This mechanism is used in the next section to collect information related to the segment delimited by the source junction and delimited junction.
In the following paragraph, we present the simulation between the classic OLSR and the new version that integrates the GFA mechanism.
4.3. Injection of the GFA Mechanism into the OLSR Protocol
Our proposal amelioration called G-OLSR as a Greedy-OLSR divides each section of the road into several groups defined by the range of vehicles equal to 250 m. Within each section, we adopt the GFA method previously proposed to collect information in the section delimited by two junctions (the source junction and the candidate junction).
The information collected is used to calculate the score of each segment delimited by the source and candidate junctions. We start by checking if this road has a forbidden direction or not by testing N1 traffic density in a segment using the following algorithm:
Si N1 = 0, so score(j) = 0 (prohibited way).
Otherwise calculation of the candidate junction score.
The score of the section for the road delimited by the source and candidate junctions is the following:
where Ni and C are the next candidate junction and the current one, respectively, and Dn and Dc are the curvilinear distance from the candidate junction Ni and the current junction to the destination, respectively. The degree of the proximity “Dp” between the candidate intersections compared to the destination is the ratio between Dn and Dc. We note also that Dnc is the curvilinear distance between the candidate junction and the source junction, and D is the distance, between the source and candidate junction, compared to the source junction.
From this score, we define the cost of the section as follows:
Then, the best section is the one with the lowest cost.
We apply the Dijkstra algorithm to positive scores in order to elect the fastest path with the lowest cost.
4.4. Simulation and Results
4.4.1. Simulation Architecture
The architecture of the simulation is shown in
Figure 11:
We start the simulation by creating the traffic simulation using SUMO.
We use SUMO “Simulation of Urban Mobility” as a traffic simulator because it is close to the reality conditions.
We start the simulation by extracting the map of the Gueliz (
Figure 12) district in Marrakech city from Morocco.
Using the SUMO simulator, we create vehicle traffic and then extract the trace file for the map of the chosen area in order to integrate it into the simulation under NS3.
Table 3 shows the simulation parameters:
4.4.2. Packet Delivery Ratio
To calculate the delivery rate for the two protocols OLSR and G-OLSR, we extract the information using the following “awk” code:
BEGIN
{
nSentPackets = 0;
nReceivedPackets = 0;
strEvent = $1;
strAgt = $4;
idPacket = $6;
strType = $7;
if (strAgt == “AGT” && strType = = «CBR»)
if (strEvent == «s»)
nSentPackets += 1;
if (strEvent == “r”)
nReceivedPackets += 1;
rPacketDeliveryRatio = nReceivedPackets / nSentPackets * 100;
printf (“Taux de distribution: % 10.2fn», rPacketDeliveryRatio);
}
END
|
The simulation results are shown in
Figure 13:
The simulation results show that our proposal gives the best performance in terms of packet delivery ratio. The PDR of G-OLSR increases more and more as the traffic increases; this is due to the use of the GFA approach, which gives better results compared to the GF in the case of low mobility or when the difference between the speeds of the vehicles is important. Thus, the difference is in the elected vehicles, and the use of the Dijkstra algorithm offers a high rate of convergence.
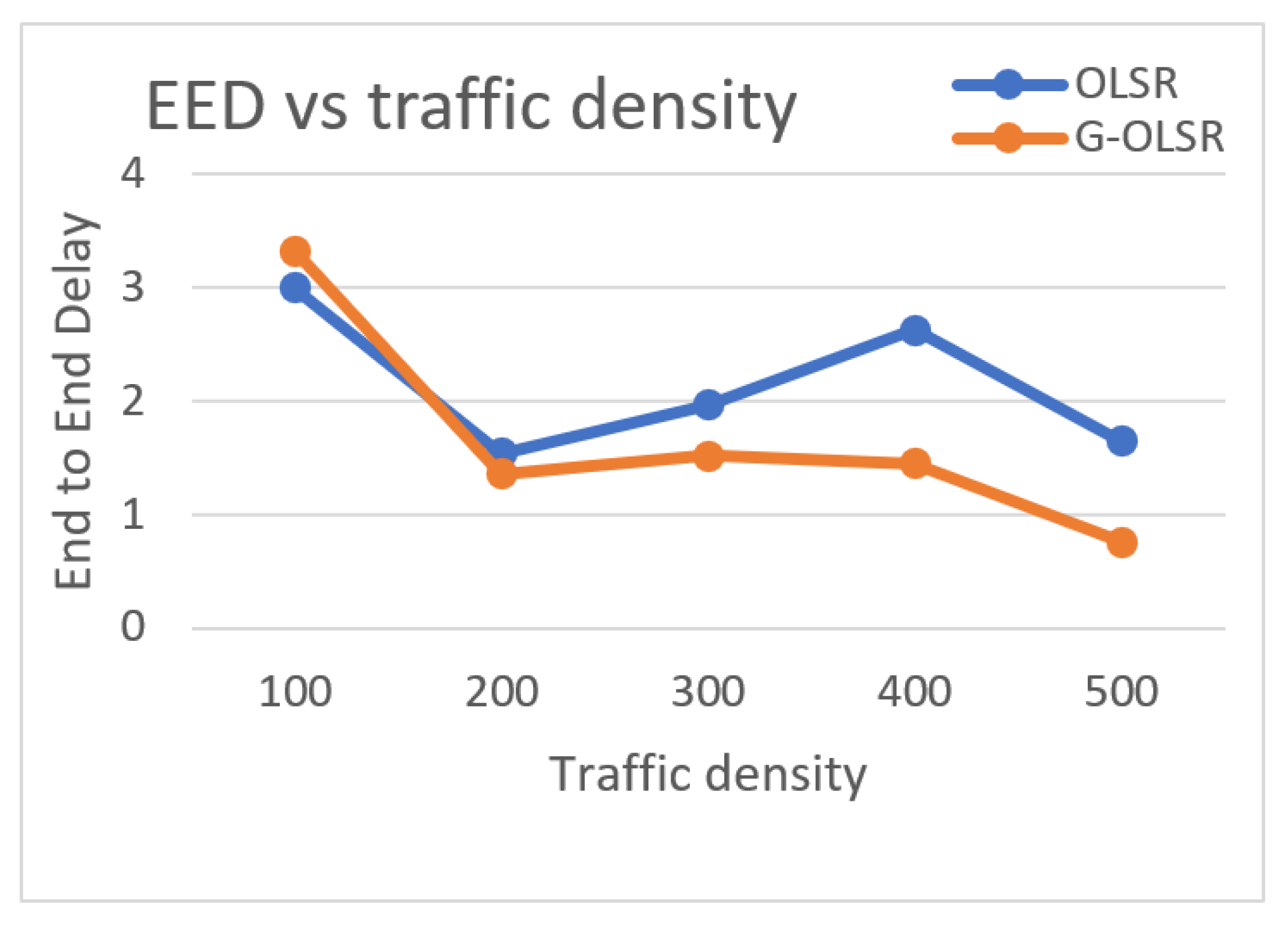
4.4.3. End-to-End Delay
We use the end-to-end delay to compare the two protocols OLSR and G-OLSR.
For different traffic densities, we calculate the end-to-end time using the following “awk” code:
BEGIN
{
rTotalDelay=0.0;
strEvent = $1;
rtime = $2;
strAgt = $4;
idPacket = $6;
strType = $7;
if (strAgt == “AGT” && strType = = «CBR»)
if (strEvent == “s”)
{
rSentTime[idPacket] = rTime;
}
if (strEvent == “r”)
{
rReceivedTime[idPacket] = rTime;
rTotalDelay += rReceivedTime[idPacket] - rSentTime[idPacket];
}
rTime = rEndTime - rStartTime;
printf(“le temps de bout en bout est: %10.2f\n”,rTime );
}
END
|
The simulation results are summarized in
Figure 14:
The simulation results show that our approach has the best performance in terms of end-to-end delay. The EED of G-OLSR decreases more and more as the traffic increases, and this is due to the use of the GFA approach, which gives better results when the mobility and the traffic density increase. In addition, the use of the Dijkstra algorithm presents a high convergence rate and therefore a lower EED for a network for high traffic.
When the traffic density situates between 200 and 400 vehicles, the EED increases for OLSR but remains stable for G-OLSR. This sudden change is made because the nodes are abundant within the network. The traffic density increases progressively, and the probability to find nodes also increases, so the EED decreases beyond 400 vehicles.
5. Discussion
In this section, the most important features of the proposed protocol G-OLSR are discussed and compared to the classic version of the OLSR protocol.
First, some works related to evaluate and compare the routing protocols are exposed. Secondly, the four studied routing protocols are presented. Next, the system used to evaluate the protocols is described. Then, simulation results are analyzed and discussed.
Based on the comparative study, we classify the protocols according to their transmission type, metrics, advantages, and disadvantages. This analysis allows us to choose OLSR, because it outperforms other protocols according to its End-to-End Delay and Packet Delivery Ratio, especially in the case of high mobility.
In addition, we note that the Greedy forwarding mechanism (GF) is more adapted to the VANET environment and gives a success rate nearly close to wired networks in the case of low mobility, and we note that GF is not efficient in the case of the stationary node. If the GF selects as a relay the node where the speed is less than other candidate node, then it can be suitable to reach the destination as quickly as possible. Therefore, we propose the Advanced Greedy Forwarding, which is an amelioration of the GF in order to overcome the problems previously cited, especially in the case of high mobility. The GFA mechanism is used to collect the information of topology for the current segment (delimited by the source and destination intersections). This information is used to compute the score that can help overcome the problem of end-to-end delay in the case of high mobility. Therefore, we choose the right segment to reach the destination as fast as possible.
The classic greedy forwarding does not take into account if the vehicle is moving or not. Knowing that the furthest node will not necessarily be the fastest and best for the transfer, to accelerate the communication, we add the speed of the vehicle as a parameter to compute the score in our amelioration. In order to validate GFA, we compare it with GF in several possible cases. We consider a simple network where we have just four nodes, the source S, the destination D, and two candidates nodes A and B, in the range of the source. We vary the distances between source and candidate nodes (xa and xb) and then we vary the speed of candidate nodes (Va and Vb).
In all simulation cases, the GFA mechanism keeps the advantages of GF and solves the problem of end-to-end delay divergence noted in the GF mechanism. This divergence is caused by the stationary vehicle, because GFA considers the speed of each vehicle and prioritizes the mobile vehicles instead of stationary ones. We also note that, when the distance between candidate nodes exceeds a threshold, the speed of candidate nodes has a significant influence and GFA can choose the closer node instead of the farthest because it can be the fastest to reach destination according to the score calculated based on the speeds and positions of candidates nodes.
Therefore, we note that GFA reacts better than GF because of the score , especially when the score of the closer vehicle is less than that of the further one.
GFA and GF have the same result, if the difference between the speeds of candidate nodes does not influence the score in such a way that the score of the furthest node is lower than that of another closer node.
In G-OLSR, we suppose that the road delimited by two junctions, source and candidate, is divided into several zones defined by the range of vehicles that is equal to 250 m. In each zone, we adopt the GFA method previously proposed to collect information such as density, direction, and all information that is used in the OLSR score. Therefore, we compute the cost of the segment and we apply the Dijkstra algorithm to reach the destination.
The simulation results show that our proposal gives the best performance in terms of packet delivery ratio. The PDR of G-OLSR increases more and more as the traffic increases. This is due to the use of the GFA approach, which gives better results compared to the GF in the case of low mobility, and when the difference between the speeds of the vehicles is important. Therefore, the difference in the process used to elect vehicles and the use of the Dijkstra algorithm offer a high rate of convergence.
The simulation results show that our approach has the best performance in terms of end-to-end delay. The EED of G-OLSR decreases more and more as the traffic increases, and this is due to the use of the GFA approach, which gives better results when the mobility and the traffic density increase. In addition, the use of the Dijkstra algorithm presents a high convergence rate and therefore a lower EED for high traffic.
When the traffic density is situated between 200 and 400 vehicles, the EED increases for OLSR but remains stable for G-OLSR, and this sudden change is made because the nodes are abundant within the network. The traffic density increases progressively, and the probability to find nodes also increases, so the EED decreases beyond 400 vehicles. Therefore, G-OLSR protects the efficiency of the information transmitted in the vehicular Ad hoc Network as we reduce the EED and we increase the PDR.
However, our approach presents some limits. When the traffic density is low or the nodes are abundant within the network, we note that G-OLSR becomes passive and behaves nearly as OLSR.
6. Conclusions
In this paper, we start with a comparative study of different routing protocols using several comparison metrics. We deduce that the OLSR protocol provides the best performance.
After this, we present the Ameliorated Greedy Forwarding method to enhance the efficiency of data transfer in the case of low mobility, which can cause the divergence of time to reach the destination. This divergence appears progressively when the difference between the speeds of the vehicles participating in the communication increases. The GFA mechanism takes into account the speed of each vehicle and prioritizes mobile vehicles compared to stationary ones. Using the new score, GFA compares the efficiency of candidate vehicles to reach the destination as quickly as possible. GFA is integrated on the G-OLSR protocol to prove the performance of our approach compared to the OLSR protocol. We use the SUMO traffic simulator to exact the map of Gueliz situated in the center of Marrakech city. The traffic trace file is integrated into the NS3 simulator. The results of the simulation prove that G-OLSR performs best compared to OLSR in terms of EED and PDR, especially for dense traffic.
We note the limitation of G-OLSR when the traffic density is low or the nodes are abundant within the network. In this case, G-OLSR behaves nearly as OLSR.
As a perspective, we will deal with this limitation and secure our new protocol to be safer and to secure the routing process more and more.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}