1. Introduction
The study of linear time-invariant (LTI) systems plays an important role in various engineering fields [
1,
2]. The most commonly studied LTI systems are likely the complex-valued (CV) LTI systems, which enable a broad area of applications in signal analysis including filtering, system analysis, correlation, signal reconstruction, smoothing, compression, and time-frequency analysis, among others [
3,
4,
5,
6,
7]. Within LTI systems analysis, convolution and the Fourier transform (FT) play important roles—convolution along with the impulse response helps to characterize LTI systems in the time domain, while the FT with the frequency response helps to characterize LTI systems in the frequency domain.
Several application-driven forms of extended or generalized convolution exist in the literature. A scalar convolution is defined on a vector field using the concept of the scalar product of two vectors [
8]. A Clifford convolution, which is an extension of the scalar convolution, is studied in [
9]. Several extensions of the convolution operation on multivector fields have been explored extensively [
10,
11,
12]. A method for pattern matching on vector fields and vector filter masks using Clifford convolution is presented in [
13].
Similarly, various application-driven extensions of FT have been proposed. The quaternion Fourier transform (QFT), which is one of the early extensions of the traditional FT, is proposed by Ell [
14] for analyzing 2D-LTI systems and further studied by Bülow [
15]. A hypercomplex extension to the standard complex Fourier transform is studied in [
14], describing the quaternion Fourier transform as a double complex algebraic product. In [
16], a hypercomplex Fourier transform is implemented by decomposition into two transforms that are isomorphic to the complex Fourier transform and provide a symplectic decomposition of the hypercomplex Fourier transform. Another quaternion Fourier transforms (QFT) is provided to study the analysis of higher-dimensional linear invariant systems in [
17]. The spectral analysis of color images is studied using a generalized quaternion approach in [
18]. In [
19], a non-commutative multivector FT generalization of the QFT is studied. The Clifford FT for color images with a geometric approach using group action is given in [
20]. In [
21], the authors introduced a new equation within a Clifford algebra, whose solutions serve as kernels for a novel class of generalized Fourier transforms and are uniquely determined by a system of partial differential equations. A general geometric Fourier transform is defined for the multivector field over
with values in GA,
[
22]. A generalization of the QFT to a general non-commutative Fourier transformation of functions from spacetime
to the Clifford geometric algebra
is studied and used to further establish two multivector Fourier transforms in [
19]. A detailed survey of the application of GA for image and signal processing is provided in [
23].
The remainder of this paper is organized as follows. In
Section 2, we discuss the traditional CV LTI systems theory, which we intend to generalize. In
Section 3, we begin by introducing the notations and terminology we use for geometric algebra (GA). Following this, we present the essential tools to express the VV signals, emphasizing the polar representation and decomposition of VV signals. In
Section 4, we present our extension of the traditional CV framework for LTI systems to a VV framework for linear rotation-invariant time-invariant (LRITI) systems, as proposed in [
24]. This includes the definition of LRITI systems and VV convolution. Additionally, we provide a generalization of the commutative property for VV convolution. In
Section 5, we provide our main contribution, that is, a frequency-domain analysis for VV signals that includes a Fourier transform (FT) for VV signals, the extension of the traditional frequency spectrum/response, and a convolution property for the FT. In
Section 6, an example is provided to illustrate the usage of the proposed method. Finally, in
Section 7 and
Section 8, we discuss and conclude the article.
2. Traditional LTI Systems Theory
The typical theory of LTI systems allows for the analysis of signals, which are represented as time-series with complex values. These CV quantities are indicated using lowercase sans serif fonts, such as
, while the real-valued quantities are denoted using lowercase italic fonts, such as
. Systems refer to mappings of signals and are denoted here using uppercase calligraphic letters, i.e.,
. In the remainder of this section, we provide a summary of standard results that we intend to generalize. We omit the proofs; however, most of the standard results are provided in [
1,
2,
25,
26,
27,
28].
Definition 1 (Linear Systems). A CV system is said to be linear if for an input consisting of a weighted sum of complex-valued signals, the output is a weighted sum of the system’s response to each of those signalswhere . Remark 1. In CV systems, rotation invariance (RI) naturally arises from the system’s linearity and by considering complex values as “scalars”. Consequently, a complex-valued system is inherently rotation-invariant in the complex plane if it exhibits linearity Definition 2 (Time-Invariant Systems). A systemis said to be time-invariant (TI) if a time-shift in the input signal results in an identical time-shift in the output signal Definition 3 (Sifting Property). The study of LTI systems in the time domain often begins with the representation of a signal in terms of a superposition of scaled shifted unit impulses Definition 4 (Impulse Response). The impulse response of a system, , is the response of the system to a unit impulse (Dirac delta) applied at τ Corollary 1. If a system is time-invariant, then the response of that system to an impulse applied at an arbitrary time τ is equal to the response of the system to an impulse applied at the time , time-shifted by τ Theorem 1 (The First Fundamental Theorem). Any LTI system can be completely characterized by a single signal called the system’s impulse response. Moreover, the output of an LTI system may then be expressed in terms of the convolution integral and can be seen in the block diagram provided in
Figure 1.
Theorem 2 (Commutative Property of CV Convolution). The CV convolution for LTI systems defined in (7b) is commutative Remark 2. Careful inspection of (
8b)
reveals two important aspects: commutation of the product of the input signal and impulse response and the interchanging of the arguments of the input signal and impulse response . Definition 5 (Fourier Transform). The study of LTI systems in the frequency domain often begins with the definition of the Fourier transform. The Fourier transform of any signal is defined by Definition 6 (Complex Exponential Signals). A CT complex exponential signal is any CV signal which can be expressed aswhere and is the angular frequency. Remark 3. The complex exponentials of different frequencies are orthogonal under the standard inner product defined on the space of square-integrable functions over an interval. In other words, their inner product is zero unless the frequencies are identical over a period.
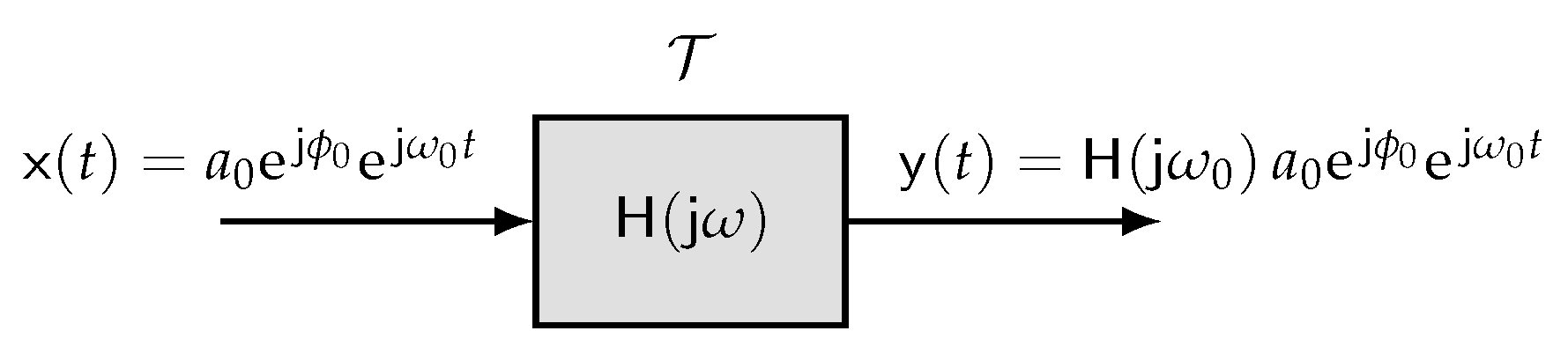
Definition 7 (Frequency Response). Any LTI system can be characterized in terms of a frequency response function as the FT of the impulse response Definition 8 (Eigenfunction Property). The eigenfunction property of LTI systems is usually stated as follows. The response of an LTI system to a complex exponential input, , isthe same complex exponential with a multiplicative (scale-rotation) factor —the eigenvalue associated with the complex exponential at frequency . A block diagram representation for the same is provided in Figure 2. Definition 9 (Frequency Spectrum). Any signal can be characterized in terms a frequency spectrum Theorem 3 (Convolution Property of the FT). The Fourier transform of the convolution of two signals is equivalent to the product of their Fourier transforms Theorem 4 (The Second Fundamental Theorem). Any LTI system can be completely characterized by the system’s frequency response, which is defined as the Fourier transform of the system’s impulse response. Moreover, the spectrum of an LTI system’s output can be computed using the convolution property of the FT, by multiplying the input spectrum with the frequency response.
3. Notation and Terminology for Geometric Algebra
Although Clifford algebras may be defined over general fields, in GA, only real numbers are associated with scalar quantities, which are denoted using lowercase italic font, i.e.,
. Traditional (polar) vectors are associated with directed lengths and denoted using lowercase upright bold font, i.e.,
, where
denotes the space of n-dimensional directed lengths. Traditional axial vectors are closely related with directed areas (bivectors) and denoted using uppercase upright bold font, i.e.,
where
denotes the space of n-dimensional directed areas. The GA is a
vector space with an additional product—the
geometric product, which unifies the inner (dot) and exterior/outer (wedge) product between two vectors
into a single geometric product
A summary of the properties of the dot, wedge, and geometric products is provided in
Table 1.
For Euclidean spaces, the vector space
can be extended to the geometric algebra
. The canonical basis for
is determined by an orthonormal basis for
where the orthonormal basis vectors satisfy
where
The elements of
are called multivectors and denoted by an uppercase italic font, i.e.,
. One exception to the notational rules provided above is that simple unit bivectors
are denoted with
lowercase upright bold font
because they have the property
Furthermore, they play a role similar to that of the traditional imaginary number (as a generator of rotations). In a similar manner to how unit vectors are used to represent lines through the origin (where there are two unit vectors
corresponding to every line), unit bivectors may be used to represent planes through the origin. Thus, we will use the language “the plane
” as an abbreviation for “the plane through the origin whose unit bivector is
” [
29].
A
k-blade is any multivector that is expressible as the outer product of
k linearly independent 1-vectors:
In
, all non-zero
k-vectors are
k-blades. Let
be a geometric product of orthogonal vectors. Then, the reverse of
is given as
Suppose we have a vector
and a
k-blade
. Then, the geometric product may be expressed as
where the inner (left contraction) and outer products are
For additional details of GA theory, the reader is referred to the works of Macdonald [
29,
30,
31], Hestenes [
32,
33], Doran et al. [
34], and Riesz [
35].
Definition 10 (Rotor). A rotor is a unit norm even grade multivector used to represent a rotation. A rotor R is any element of that can be written as the product of an even number of unit vectors and satisfies Theorem 5 (Rotation of a Vector). Let be a vector and R be a rotor; then, the rotation of vector by R resulting in the vector is expressed as Definition 11 (Simple Bivector). Let and be two orthogonal vectors; then, a simple bivector is defined asIn Euclidean spaces, the square of a simple unit bivector is . Definition 12 (Simple Rotor). A rotor, R, that can be expressed as the product of two unit vectors, , is called a simple rotor [33].Any simple rotor R can be expressed in terms of the exponential of a simple bivector Corollary 2 (Simple Rotation of a Vector). Let denote the result of rotating the vector in the plane by angle θ. Then, is expressed as
Decomposing
in the plane
in (
27) gives
The result in (
28c) illustrates how rotation affects the vector
within the plane of rotation
.
Remark 4. Let denote the result of rotating the vector in the plane by angle θ. Then, the rotation of vector performed from the right side is related to the rotation performed from the left side as Definition 13 (Polar Representation of a Vector-Valued Signal). We represent the VV signal in polar form relative to a Euclidean orthonormal basis vector aswhere is a real , and is a rotor formed as the sum of a scalar and bivector, i.e., . Remark 5. For CV systems, there exists a distinguished axis (the real axis) that is used as the reference by which angles are measured. In other words, within the CV systems, the angle may be measured with respect to a unit element along the real axis in the complex plane. However, the proposed coordinate-free treatment of vector-valued systems has no such distinguished axis. Thus, we choose as our reference—essentially associating with the unit element along the real axis of the traditional CV linear systems theory.
Definition 14 (Totally Orthogonal Planes (TOPs)). Two planes and are totally orthogonal if they satisfy Corollary 3 (Commutative Rotations for TOPs). Let and be TOPs. Then, the associated rotations represented by the simple rotors and are commutative Definition 15 ((Canonical) Set of TOPs). We define a (canonical) set of totally orthogonal planes for N-dimensional space aswhere M is given byFor odd N-dimensional space, analysis is performed by embedding into an even -dimensional space. Remark 6. Embedding of an odd-dimensional space within an even-dimensional space may be considered as an extension of standard practice in the following sense. The analysis of a one-dimensional real-valued signal is conventionally performed by embedding the signal into the two-dimensional complex plane by considering it as a purely real CV signal.
Remark 7. TOPs have two important features: (1) They consist of pairwise commuting planes, which implies orthogonal (commuting) rotations [33]. This is important when considering rotations about arbitrary planes, because factoring a rotation into TOPs enables commutation of rotations in TOPs. (2) They form mutually exclusive or non-overlapping orthogonal planes in the sense that the intersection of the planes is empty. For example, in space, , , form a set of orthogonal planes. However, the planes and share any vector along the line of and the planes and share any vector along the line of . On the other hand, embedding into , we form the set of TOPs as , which have no vectors in common. This is important when decomposing a signal into TOPs. Definition 16 (Decomposition of a VV Signal into TOPs). A vector-valued signal in a finite N-dimensional space can always be decomposed into the projections with respect to the TOPswhere is provided in (
33)
and M is given by (
34)
. Definition 17 (Polar Decomposition of a VV Signal Decomposed into TOPs). A vector-valued signal in N-dimensional space can always be decomposed in polar form relative to an Euclidean orthonormal basis vectors with M number of totally orthogonal planeswhere M is given by (
34)
. Remark 8. In traditional LTI system theory, the real axis serves as a reference for measuring angles. To align with this convention, we adopt as the reference direction while using the polar decomposition of an arbitrary VV signal in (
30)
. However, when we decompose the VV signal into TOPs, a reference vector (direction) must be specified for each TOP, as given in (
36)
. 4. Time Domain Analysis for LRITI Systems
This section presents the relevant results from [
24], where we introduced LRITI systems and defined a VV convolution. Traditionally, the CV convolution definition in (7) involves the product of two CV signals
and
, yielding a CV output signal
. Direct extension of (
7b) would imply the product of two VV signals
and
. However, this immediately contradicts the definition of a VV system, which has both a VV input and VV output, because the product of two VV signals is not a VV signal
. This leads to the reinterpretation of the CV product in CV convolution, allowing for a VV convolution in terms of a scale-rotation instead of a product.
In classical linear time-invariant (LTI) system theory, a single Dirac delta function—yielding a single impulse response—is typically sufficient to fully characterize the system’s behavior. However, in the context of vector-valued systems or those formulated within hypercomplex algebras, this assumption may no longer hold [
17]. Preliminary insights suggest that at least two or more orthogonally directed, vector-valued impulse inputs are required to probe the system across independent orientations.
This limitation highlights the necessity of probing the system along multiple, independent input orientations to obtain a complete and informative response. This observation raises a fundamental and largely unexplored research question: What is the minimal and sufficient set of impulse responses required to uniquely characterize a vector-valued or hypercomplex-valued system? We give an answer in the context of LRITI systems that a single impulse response is sufficient to characterize a system. Additionally, a summary of the operators is provided in
Table 2.
4.1. LRITI Systems
Definition 18 (Linear VV Systems). A system is said to be linear if for an input consisting of a weighted sum of VV signals, the output is a weighted sum of the system’s response to each of those signals Remark 9. As previously noted, for CV systems, linearity in (
1)
implies rotational invariance as given in (
2)
. However for VV systems, only real numbers are considered as “scalars”, and thus rotation invariance is not automatically inherited from (
37)
as it was from (
1)
. Therefore, to maintain an alignment between the traditional and generalized theories, we define an additional property, termed rotational invariance. Definition 19 (Rotation-Invariant VV Systems). A system is said to be rotation-invariant if a rotation in the input signal results in an identical rotation in the output signal Definition 20 (Time-Invariant VV Systems). A system is said to be a time-invariant if a time-shift in the input signal results in an identical time-shift in the output signal Remark 10. The time-invariance property of the VV system (
39)
is a direct extension of the time-invariance property of the CV system (
3)
. Definition 21 (Sifting Property of Unit Impulse for VV Signals). Using the polar representation of a vector-valued signal in (
30)
, we write the generalized sifting property of the unit impulse as Remark 11. The expression in (
40a)
is a straightforward extension of (
4)
, while (
40b)
provides the expression that enables us to leverage the rotation invariance (RI) property of LRITI systems. Definition 22 (VV Impulse Response). We define the impulse response of a VV LRITI system due to an impulse at time in the direction asFor a time-invariant system, the response to an impulse at can be expressed in terms of the response to an impulse at asFor convenience, we usually drop the subscript and superscript. Remark 12. The impulse response of the VV LRITI systems given in (
41)
and (
42)
are similar to CV LTI system (
5)
and (
6)
, but additionally, a direction must be chosen in which to apply the impulse. We choose, for convention, the reference direction to be . Theorem 6 (The First Fundamental Theorem). Any LRITI system can be completely characterized by the impulse response defined in (
42)
. Moreover, the output of the LRITI system for arbitrary input represented in the polar form given in (
30)
can be computed with the convolution given by
The proof of the VV convolution (
43) is provided in [
24], and a block diagram representation is provided in
Figure 3.
Remark 13. Since the traditional convolution definition (
7b)
is not directly applicable to vector-valued (VV) signals, we define a convolution operator specifically for VV signals (
43)
. This definition leverages the rotation invariance (RI) property and represents the operation in terms of the scaling and rotation of the VV signal. Remark 14. In traditional LTI systems theory, the commutative property of CV convolution given in (
8b)
enables us to derive the eigenfunction property of LTI systems given in (
12)
. To proceed with a development of LRITI systems in a way that mirrors the traditional CV theory thus requires a generalization of (8). As noted in Remark 2, there are two important aspects to the commutative property of CV convolution (
8b)
. Fortunately, derivation of the eigenfunction property of LRITI systems only requires the generalization of the second aspect. Therefore, to maintain an alignment between the traditional and generalized theories, we define an additional property to capture this second aspect, termed the flip-shift-slide property of VV Convolution. Theorem 7 (Flip-Shift-Slide (FSS) Property of VV Convolution). The output of an LRITI system with a time-shift of the signal is equivalent to the output of the LRITI system with a time-shift of the input signal
The proof for the FSS property (
44) is provided in
Appendix A.1.
4.2. Summary of Time-Domain Analysis for VV Signals and LRITI Systems
In
Section 4, we provided the properties of LRITI systems, including linearity, time invariance, and rotational invariance. Additionally, we introduced the sifting property of the Dirac delta and the impulse response for LRITI systems. We highlighted both the fundamental similarities and the distinctive differences of VV LRITI systems theory compared to traditional CV LTI systems theory. Furthermore, we pointed out that there are two aspects of the commutative property, and using the generalization of the second aspect is sufficient to derive the eigenfunction property of LRITI systems. Finally, we provide an answer to the open question posed by Ell in [
17] regarding the number of impulse responses necessary to characterize a system. In particular, if the system is LRITI, then a single impulse response suffices. Furthermore, a key advantage of rotational invariance, in the context of the first fundamental theorem of the LRITI system, is that it simplifies system analysis in a manner similar to how time invariance benefits traditional LTI systems—–by reducing the number of impulse responses required for convolution.
7. Discussion
The main goal of this work was to develop a time-domain and frequency-domain analyses for VV signals and LRITI systems which aligns with the traditional theory for CV signals and LTI systems. In the transition from the CV theory, where scalars are complex-valued, to the VV theory where scalars are considered real-valued, the linearity property suffered a loss of rotational invariance. Thus, to define a VV theory which aligns with the CV theory, required the specification of a rotational invariance property in addition to linearity for VV systems.
Using the polar representation of the VV signal in (
30) allowed us to define the sifting property for VV signals in (
40b) which we leverage along with the properties of linearity (L), rotation invariance (RI), and time invariance (TI) leading to a definition of VV convolution. With VV convolution defined, the bivector exponential signals are shown to be eigenfunction of convolution and LRITI systems. A frequency response is defined which further demonstrates that bivector exponentials take the place of complex exponentials in the traditional theory.
While the frequency response in (64) allows the output of an LRITI system to be computed for an input consisting of an arbitrary bivector exponential, the FT in (
45) does not provide a decomposition for an arbitrary input signal. Thus, to perform the frequency-domain analysis for a general VV signal, we introduce a decomposition method utilizing a set of TOPs. Leveraging the TOPs, we define a frequency spectrum for VV signals in (
69) and a frequency response for LRITI sytems in (
67) which aligns with and generalizes the frequency spectrum and frequency response of CV theory. Finally, the convolution property of the FT for VV signals is derived which generalizes the results from CV theory.
While extending the theory of CV signals and LTI systems to the theory for VV signals and LRITI systems, there were two instances where a traditional property pulled apart into two distinct pieces. First, the linearity property of the traditional CV LTI system theory, which inherently implies the rotation-invariance (RI) property for CV signals, (complex) linearity separates into two distinct concepts: (real) linearity and rotation-invariance (RI). Second, the commutative property of VV convolution requires the separation of two concepts in the definition of convolution: commutative multiplication of the input signal and impulse response and the swapping/interchanging of the arguments of the input signal and the impulse response. Additionally, a comparative summary of the notations and definitions used for traditional CV signals and VV signals is provided in
Table 3. Another comparative study of the traditional CV thoery and the proposed VV theory is provided in
Table 4.
One significant difference between CV and VV theory is that the Fourier transform (FT) does not enable decomposition in a space with dimensions higher than a plane. This is because in traditional CV theory, frequency-domain analysis relies on the complex plane, which intrinsically supports only two-dimensional signal representations. For vector-valued signals in , with , this limitation necessitates a channel-wise decomposition—treating each component separately using complex planes resulting in N scalar complex computations. This approach loses the geometric relationships among components and fails to provide a unified spectral interpretation in arbitrary dimensions.
For , a vector-valued signal cannot be naturally decomposed within the complex plane, as complex numbers inherently represent only two-dimensional structures. This motivates the need for more general algebraic frameworks—such as geometric algebra—that can represent and manipulate an arbitrary-dimensional VV signals in a unified and coordinate-free manner.
Therefore, we propose to resolve the issue by use of TOPs. For an arbitrary dimension, N TOPs decomposition provides a principled approach in representing VV signals in a set of mutually orthogonal planes. This framework enables a unified and geometrically meaningful analysis of signals across arbitrary dimensions. TOPs provide frequency-domain analysis for a general VV signal in a finite number of planes, . TOPs enables one to compute the FT of each decomposed signal in terms of planar spectra, , in their respective planes.
To generalize the frequency-domain analysis, we introduced two distinct definitions of the frequency response: a first that is valid for a bivector exponential signal in an arbitrary plane and a second that is valid for a general VV signal decomposed into a set of TOPs. While we can define two different frequency responses, the one which does not use TOPs is of limited utility, because of the lack of a decomposition algorithm.
Additionally, an advantage of the partitioning of a signal into TOPs lies in the fact that standard CV theory is essentially a “planar theory”. Thus, by partitioning the analysis into TOPs, we can leverage much of our existing knowledge and expertise.
8. Conclusions
Geometric algebra provides a power set of mathematical tools for carrying out coordinate-free signal processing. Unfortunately, it is not obvious how to extend many of the most commonly used tools in signal processing (such as convolution and frequency response) from operations defined on complex-valued (CV) time-series in , to operations defined on vector-valued (VV) times-series in . Moreover, a proper holistic extension of the conventional theory could lead to a deeper understanding of multidimensional signal analysis and potentially unlock more efficient computational methods for image and signal processing.
To that end, we have proposed a set of definitions of convolution, Fourier transform (FT), frequency response, and frequency spectrum for VV signals and linear rotation-invariant time-invariant (LRITI) systems, which closely aligns and generalizes the theory for CV signals and linear time-invariant (LTI) systems. However, we provide a frequency response that is valid in the context of bivector exponential signals; the lack of a matching decomposition algorithm for a general VV signal prevents further utility. This leads to the definition of both a frequency spectrum and frequency response with respect to a set of totally orthogonal planes (TOPs). Finally, the convolution property of the FT for VV signals is derived, establishing a relationship between time-domain and frequency-domain analysis, which we believe aligns as closely as possible with the CV LTI system theory.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}