
Mixture Density Conditional Generative Adversarial Network Models (MD-CGAN)

Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions and Paper Structure
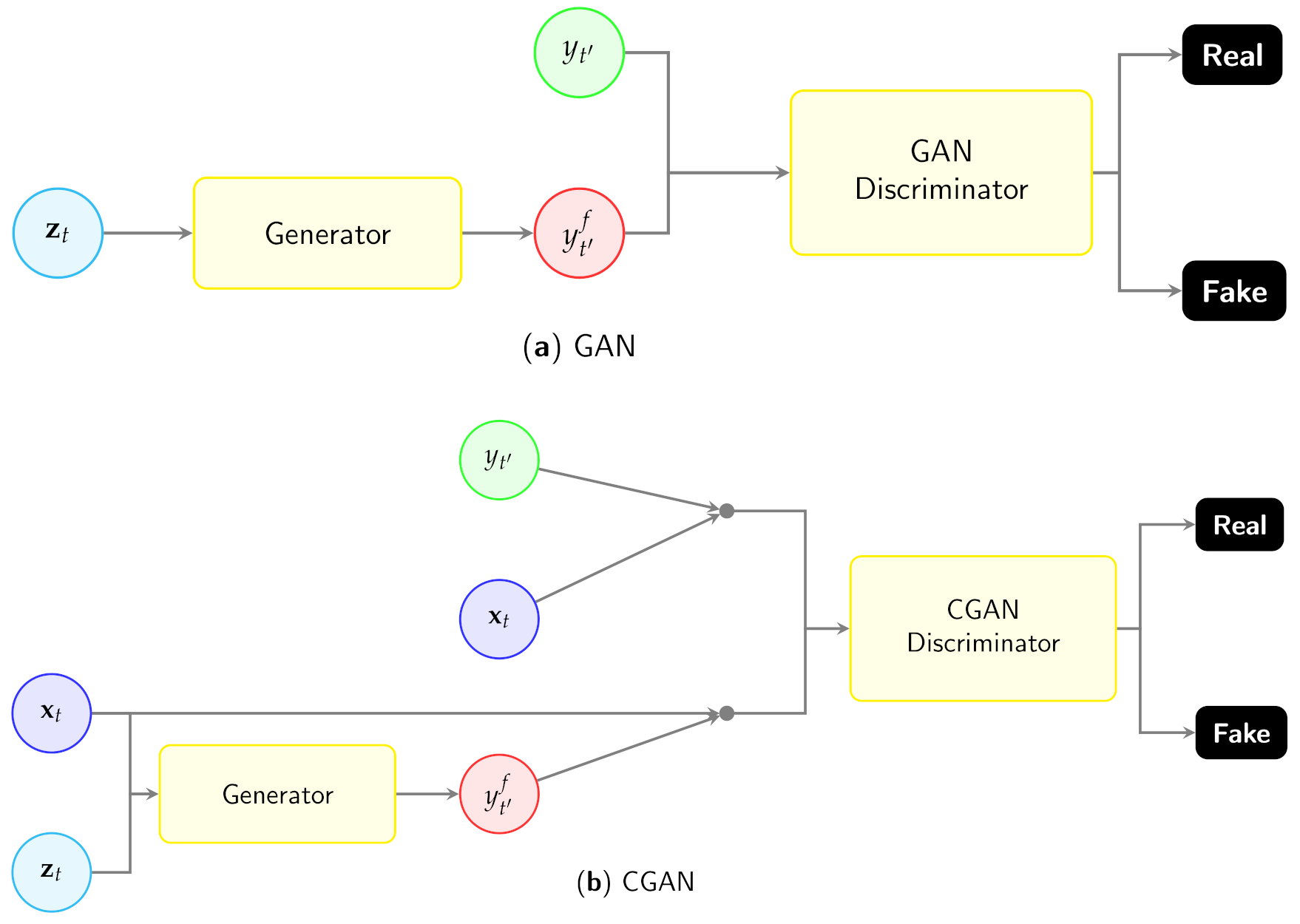
2. The GAN and CGAN Model
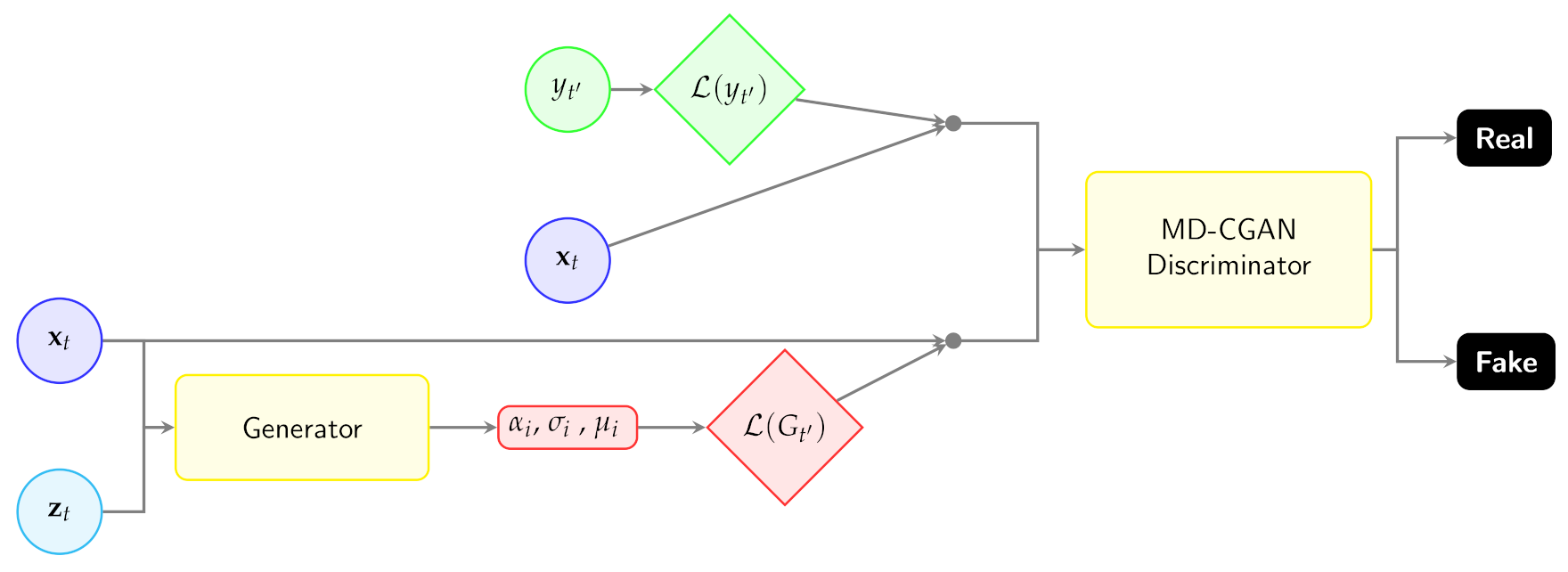
3. The MD-CGAN Model Framework
| Algorithm 1 MD-CGAN Algorithm. |
|
4. Experiments
4.1. Comparison with Other Learning Models
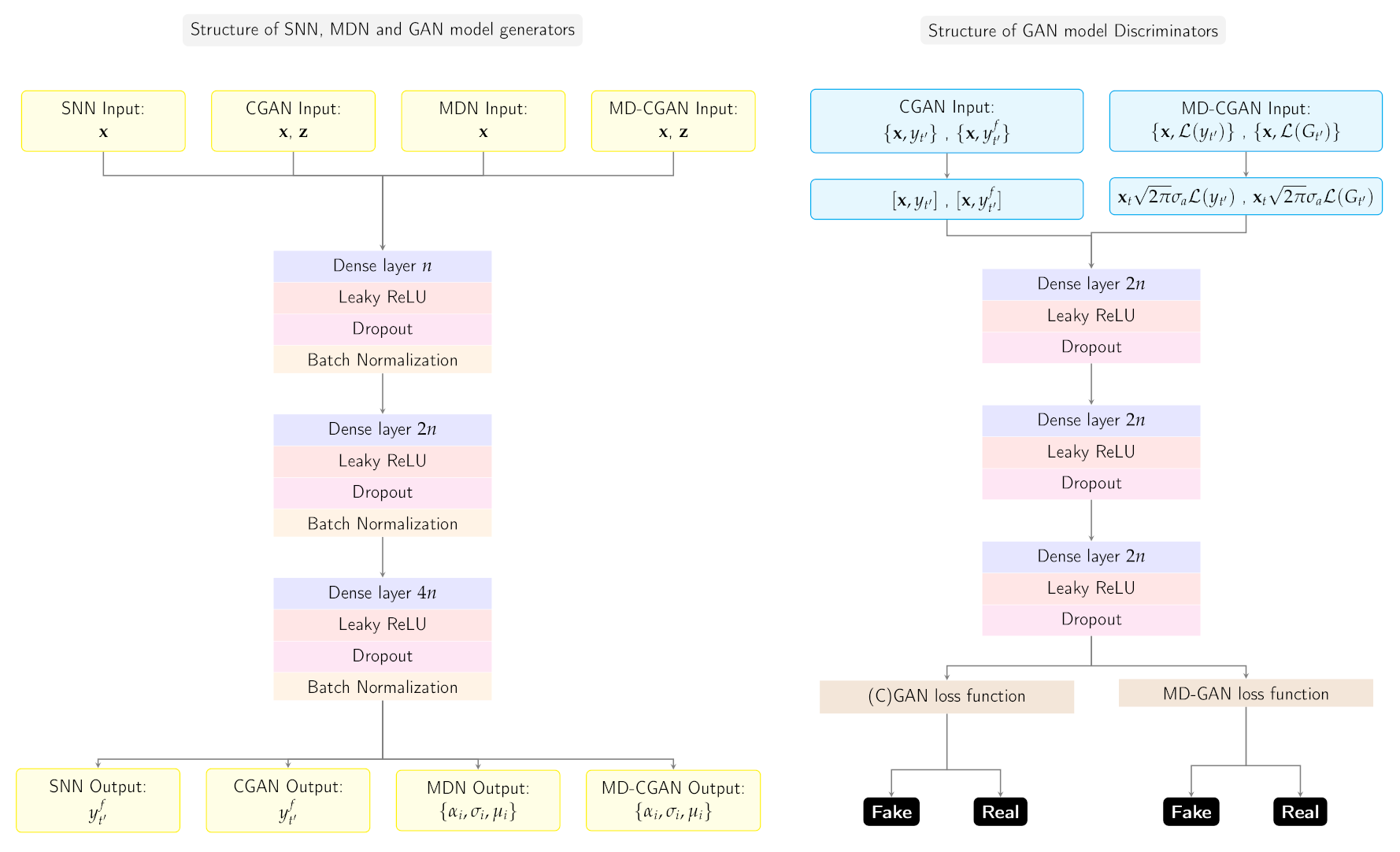
4.2. Details of Implementation
4.3. Data
4.4. One-Step Forecasting
4.5. Forecasts over Longer-Horizons
4.6. Multi-Modal Posterior Predictions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 27, 2672–2680. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional generative adversarial nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Wu, H.; Gu, B.; Wang, X.; Pickert, V.; Ji, B. Design and control of a bidirectional wireless charging system using GAN devices. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 864–869. [Google Scholar]
- Hodge, J.A.; Mishra, K.V.; Zaghloul, A.I. Joint multi-layer GAN-based design of tensorial RF metasurfaces. In Proceedings of the 2019 IEEE 29th International Workshop on Machine Learning for Signal Processing (MLSP), Pittsburgh, PA, USA, 13–16 October 2019; pp. 1–6. [Google Scholar]
- Barth, C.B.; Assem, P.; Foulkes, T.; Chung, W.H.; Modeer, T.; Lei, Y.; Pilawa-Podgurski, R.C. Design and control of a GAN-based, 13-level, flying capacitor multilevel inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 2179–2191. [Google Scholar] [CrossRef]
- Esteban, C.; Hyland, S.L.; Rätsch, G. Real-valued (Medical) Time Series Generation with Recurrent Conditional GANs. arXiv 2017, arXiv:1706.02633. [Google Scholar]
- Wiese, M.; Knobloch, R.; Korn, R.; Kretschmer, P. Quant GANs: Deep Generation of Financial Time Series. Quant. Financ. 2020, 20, 1419–1440. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Pan, Z.; Hu, G.; Tang, S.; Zhao, C. Stock market prediction on high-frequency data using generative adversarial nets. Math. Probl. Eng. 2018, 2018, 4907423. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Cai, X.; Zhang, Y.; Xu, J.; Xiaojie, Y. Multivariate time series imputation with generative adversarial networks. Adv. Neural Inf. Process. Syst. 2018, 31, 1596–1607. [Google Scholar]
- Yu, Y.; Zhou, W.J. Mixture of GANs for Clustering. In Proceedings of the International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 13–19 July 2018; pp. 3047–3053. [Google Scholar]
- Gurumurthy, S.; Kiran Sarvadevabhatla, R.; Venkatesh Babu, R. Deligan: Generative adversarial networks for diverse and limited data. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 166–174. [Google Scholar]
- Ben-Yosef, M.; Weinshall, D. Gaussian mixture generative adversarial networks for diverse datasets, and the unsupervised clustering of images. arXiv 2018, arXiv:1808.10356. [Google Scholar]
- Eghbal-zadeh, H.; Zellinger, W.; Widmer, G. Mixture density generative adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 5820–5829. [Google Scholar]
- Yoon, J.; Jarrett, D.; van der Schaar, M. Time-series Generative Adversarial Networks. In Advances in Neural Information Processing Systems; Curran Associates, Inc.: Vancouver, BC, Canada, 2019; Volume 32. [Google Scholar]
- Richardson, E.; Weiss, Y. On GANs and GMMs. In Proceedings of the International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2018; pp. 5847–5858. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Papoulis, A. Probability, Random Variables, and Stochastic Processes; McGraw–Hill: New York, NY, USA, 1984. [Google Scholar]
- Chollet, F. Keras. 2015. Available online: https://keras.io (accessed on 30 April 2018).
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Mackey, M.C.; Glass, L. Oscillation and chaos in physiological control systems. Science 1977, 197, 287–289. [Google Scholar] [CrossRef] [PubMed]
- Clette, F. WDC-SILSO. 2015. Available online: http://www.sidc.be/silso/ (accessed on 20 September 2018).
- Bureau of Labor Statistics, United States Department of Labor. 2018. Available online: https://www.bls.gov/ (accessed on 20 September 2018).
- Investing.com. Euro US Dollar Daily Price. 2018. Available online: https://www.investing.com/currencies/eur-usd-historical-data (accessed on 20 September 2018).
- U.S. Energy Information Administration. 2020. Available online: https://www.eia.gov/ (accessed on 15 March 2020).
- Microsoft Corp. (MSFT), Yahoo!Finance. CBOE Volatility Index Historical Data. 2020. Available online: https://finance.yahoo.com/quote/%5EVIX/history?p=%5EVIX (accessed on 15 March 2020).
- Microsoft Corp. (MSFT), Yahoo!Finance. Invesco DB US Dollar Index Bullish Fund Historical Data. 2020. Available online: https://finance.yahoo.com/quote/UUP/history?p=UUP (accessed on 10 June 2020).
- Microsoft Corp. (MSFT), Yahoo!Finance. iShares MSCI Brazil Small-Cap ETF Historical Data. 2020. Available online: https://finance.yahoo.com/quote/EWZS/history?p=EWZS (accessed on 10 June 2020).
- Hipel, K.W.; McLeod, A.I. Number of Daily Births in Quebec, 1 January 1977 to 31 December 1990. 1994. Available online: https://datamarket.com/data/set/235j (accessed on 30 September 2018).
- National Centres for Environmental Information. Minimum Daily Temperatures in Caribou, ME, USA, 1940–1950. 2021. Available online: https://www.ncdc.noaa.gov/cdo-web/datasets (accessed on 10 July 2021).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0% Noise | 5% Noise | 10% Noise | 15% Noise | 20% Noise | 25% Noise | 30% Noise | |
|---|---|---|---|---|---|---|---|
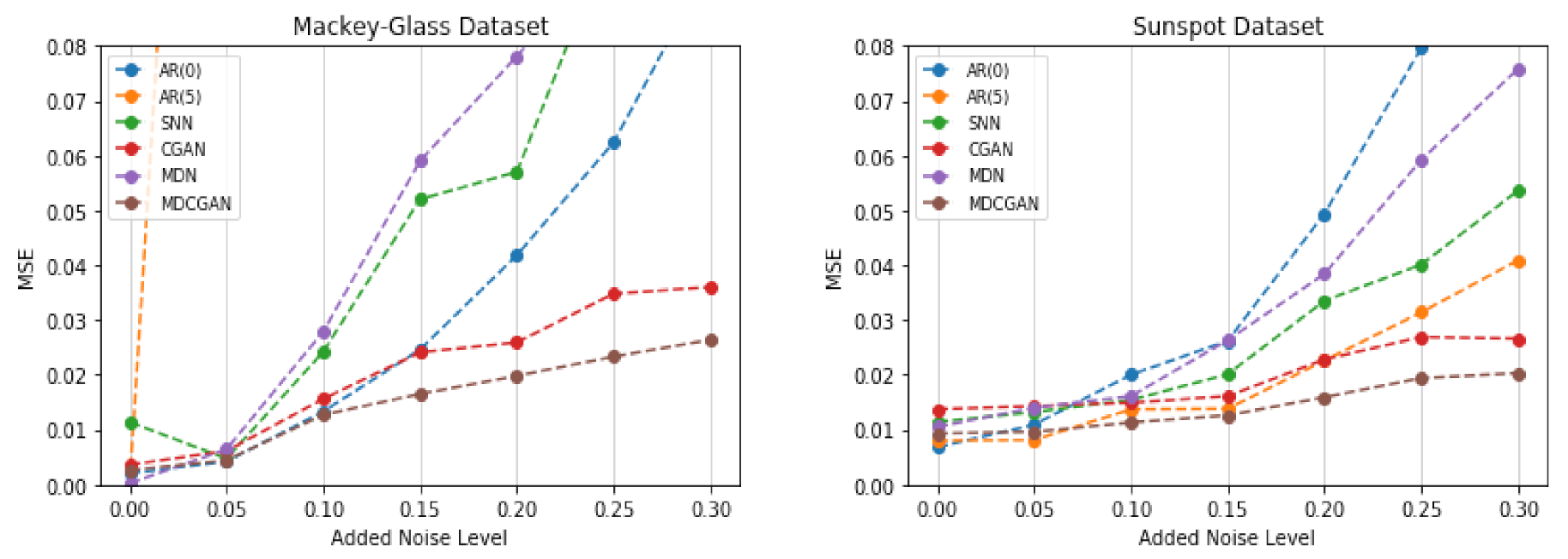
| AR(0) | 0.0020 | 0.0042 | 0.0133 | 0.0246 | 0.0418 | 0.0624 | 0.0951 |
| AR(5) | 4.1 × 10 | 0.2794 | 1.1558 | 2.6581 | 4.4868 | 7.3152 | 10.1527 |
| SNN | 0.0014 | 0.0047 | 0.0242 | 0.0519 | 0.0570 | 0.1013 | 0.1640 |
| CGAN | 0.0036 | 0.0061 | 0.0155 | 0.0240 | 0.0259 | 0.0347 | 0.0360 |
| MDN | 0.0002 | 0.0064 | 0.0278 | 0.0589 | 0.0780 | 0.0980 | 0.1402 |
| MD-CGAN | 0.0026 | 0.0044 | 0.0126 | 0.0165 | 0.0197 | 0.0233 | 0.0264 |
| 0% Noise | 5% Noise | 10% Noise | 15% Noise | 20% Noise | 25% Noise | 30% Noise | |
|---|---|---|---|---|---|---|---|
| AR(0) | 0.0080 | 0.0109 | 0.0200 | 0.0262 | 0.0494 | 0.0795 | 0.0974 |
| AR(5) | 0.0068 | 0.0081 | 0.0137 | 0.0138 | 0.0226 | 0.0314 | 0.0409 |
| SNN | 0.0114 | 0.0132 | 0.0154 | 0.0201 | 0.0335 | 0.0401 | 0.0536 |
| CGAN | 0.0137 | 0.0143 | 0.0149 | 0.0161 | 0.0228 | 0.0269 | 0.0266 |
| MDN | 0.0105 | 0.0140 | 0.0161 | 0.0263 | 0.0384 | 0.0592 | 0.0758 |
| MD-CGAN | 0.0093 | 0.0096 | 0.0113 | 0.0126 | 0.0159 | 0.0194 | 0.0203 |
| USIJC | EURUSD FX Rate | WTI | Nat Gas | VIX Index | Heating Oil | USD Index | EM ETF | DBQ | MDT | |
|---|---|---|---|---|---|---|---|---|---|---|
| AR(5) | 0.78 | 1.91 | 0.85 | 1.01 | 0.71 | 0.82 | 1.24 | 0.89 | 0.56 | 0.65 |
| SNN | 0.79 | 1.25 | 0.89 | 0.94 | 0.71 | 0.93 | 1.34 | 0.82 | 0.41 | 0.64 |
| CGAN | 0.77 | 0.85 | 1.53 | 1.07 | 0.91 | 0.54 | 1.37 | 0.69 | 0.66 | 0.69 |
| MDN | 0.84 | 3.48 | 1.48 | 1.13 | 0.77 | 0.89 | 0.68 | 0.81 | 0.45 | 0.62 |
| MD-CGAN | 0.73 | 0.76 | 0.80 | 0.82 | 0.66 | 0.59 | 0.54 | 0.65 | 0.38 | 0.61 |
| USIJC | EURUSD FX Rate | WTI | Nat Gas | VIX Index | Heating Oil | USD Index | EM ETF | DBQ | MDT | |
|---|---|---|---|---|---|---|---|---|---|---|
| −1.01 | −1.79 | −1.75 | −1.28 | −1.50 | −1.63 | −0.65 | −1.26 | −0.62 | −0.82 | |
| −1.05 | −0.98 | −1.24 | −1.33 | −1.39 | −1.37 | −0.83 | −1.10 | −0.69 | −0.85 | |
| −1.09 | −0.67 | −1.33 | −1.25 | −1.48 | −1.35 | −0.86 | −1.09 | −0.67 | −0.91 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zand, J.; Roberts, S. Mixture Density Conditional Generative Adversarial Network Models (MD-CGAN). Signals 2021, 2, 559-569. https://doi.org/10.3390/signals2030034
Zand J, Roberts S. Mixture Density Conditional Generative Adversarial Network Models (MD-CGAN). Signals. 2021; 2(3):559-569. https://doi.org/10.3390/signals2030034
Chicago/Turabian StyleZand, Jaleh, and Stephen Roberts. 2021. "Mixture Density Conditional Generative Adversarial Network Models (MD-CGAN)" Signals 2, no. 3: 559-569. https://doi.org/10.3390/signals2030034
APA StyleZand, J., & Roberts, S. (2021). Mixture Density Conditional Generative Adversarial Network Models (MD-CGAN). Signals, 2(3), 559-569. https://doi.org/10.3390/signals2030034