

A Low-Complexity Versatile Beamforming Method for Multiple Parametric Arrays


Abstract
1. Introduction
2. Theory
2.1. Acoustic Field Structure of Multiple Parametric Arrays
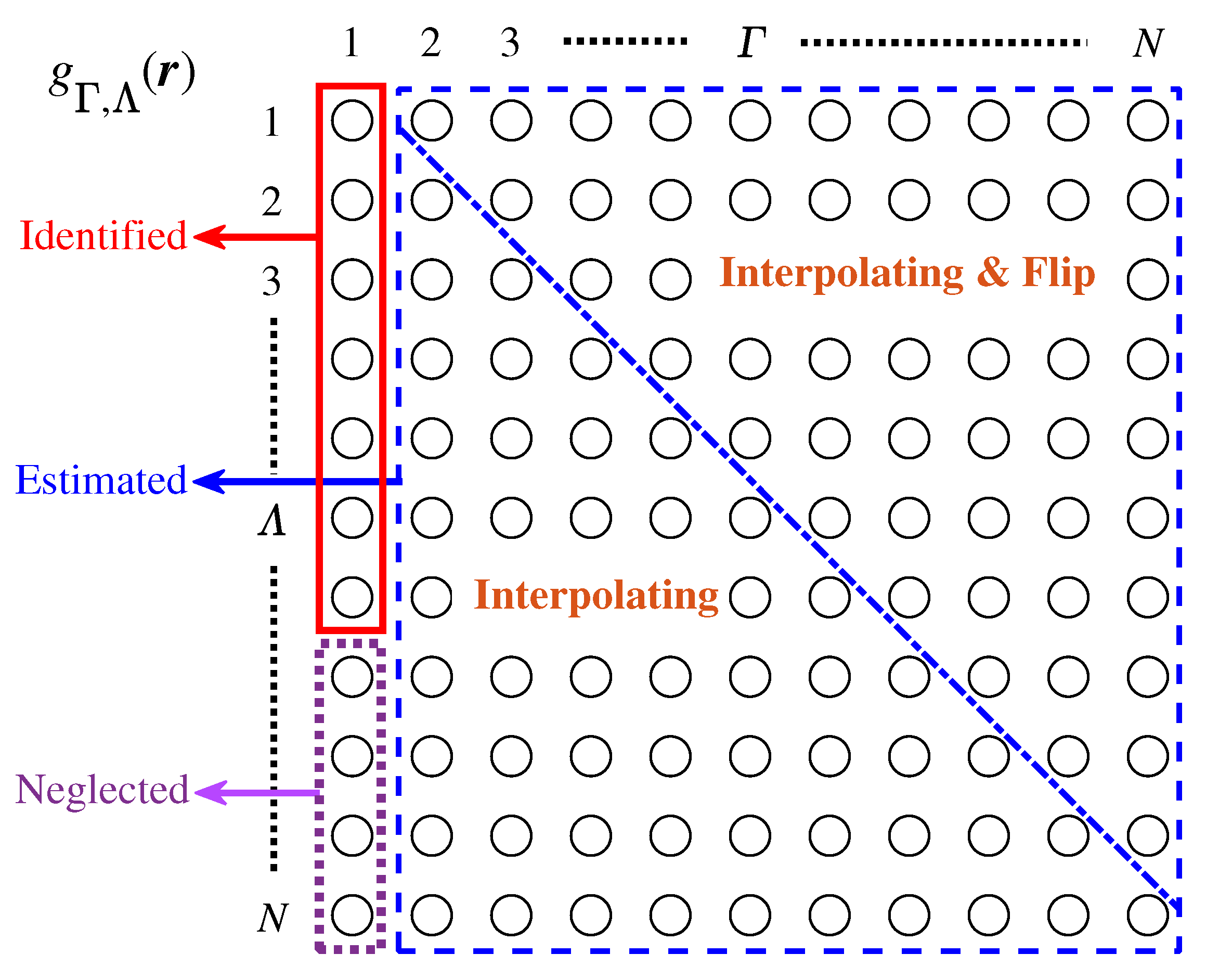
2.2. Low-Complexity Versatile Beamforming Method
3. Results and Discussions
3.1. Setup of the Numerical Model
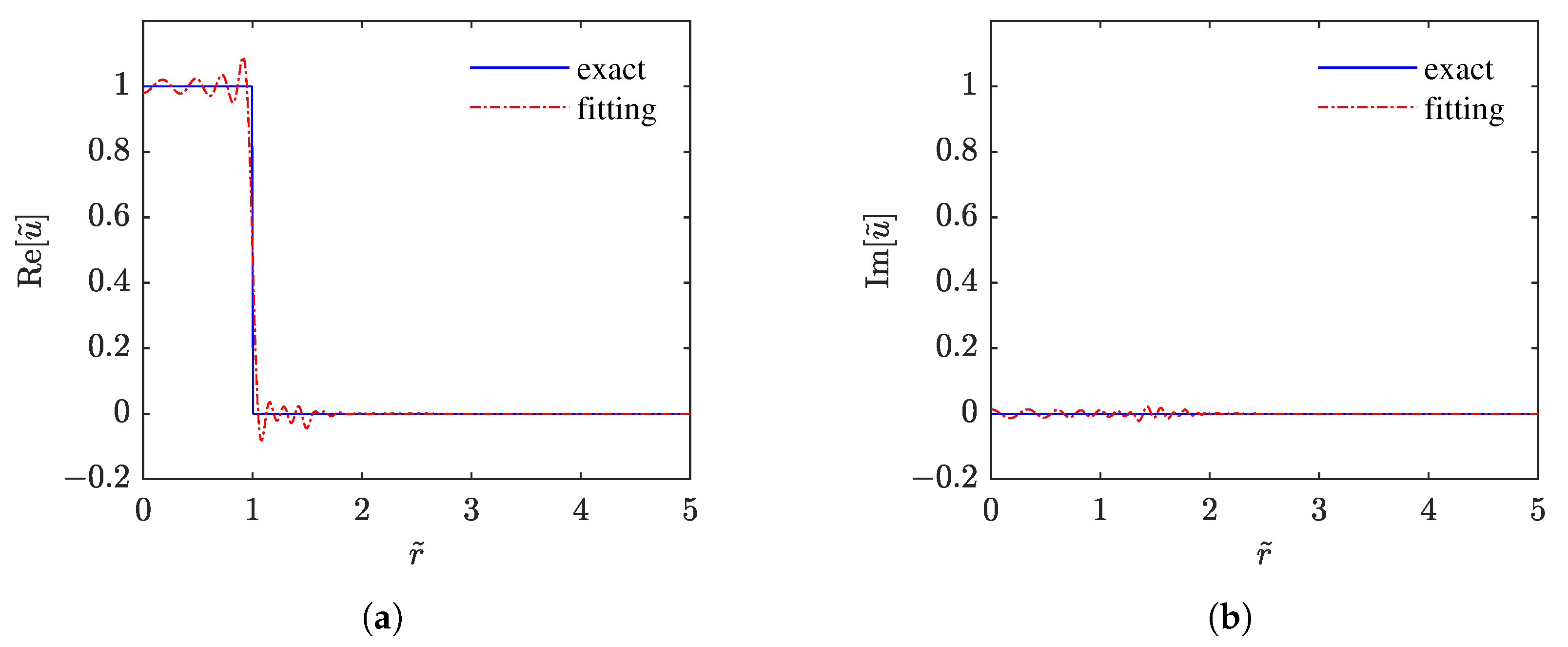
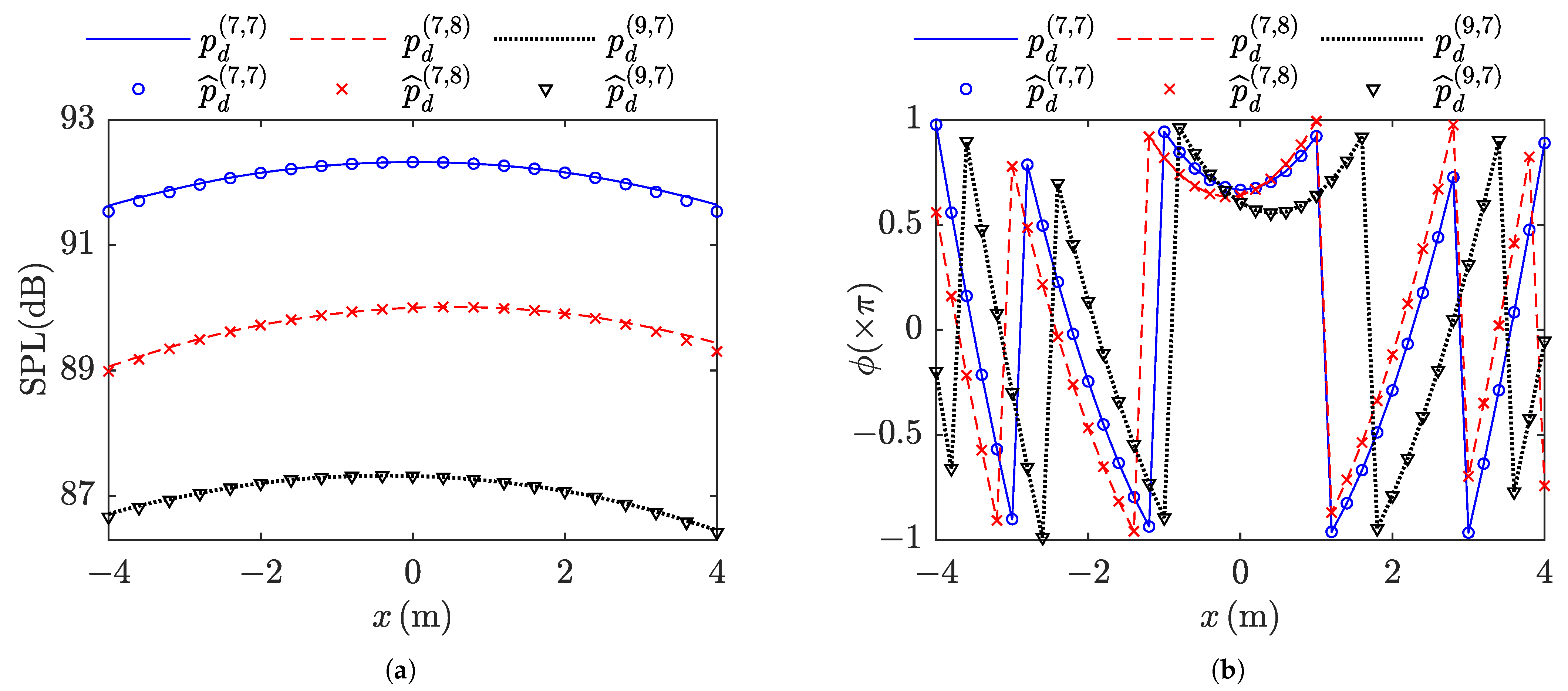
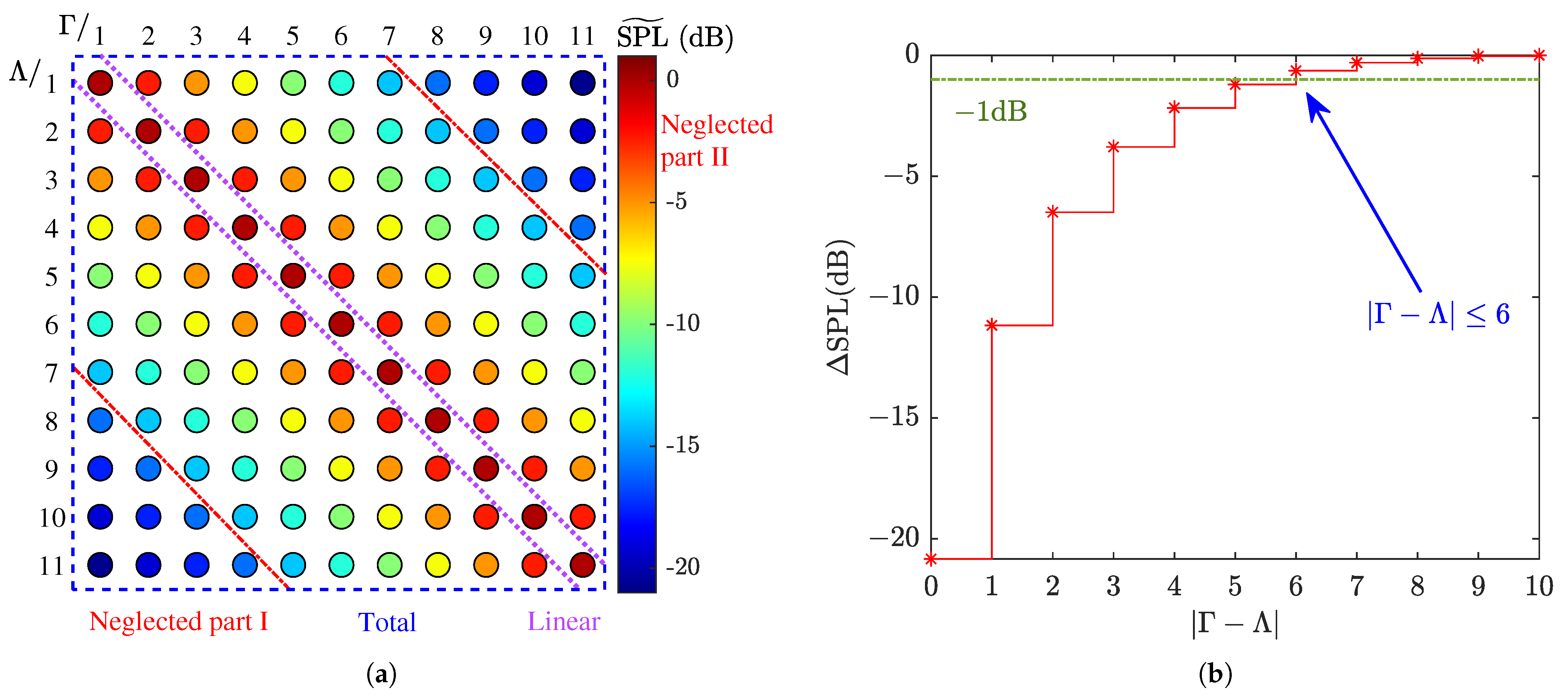
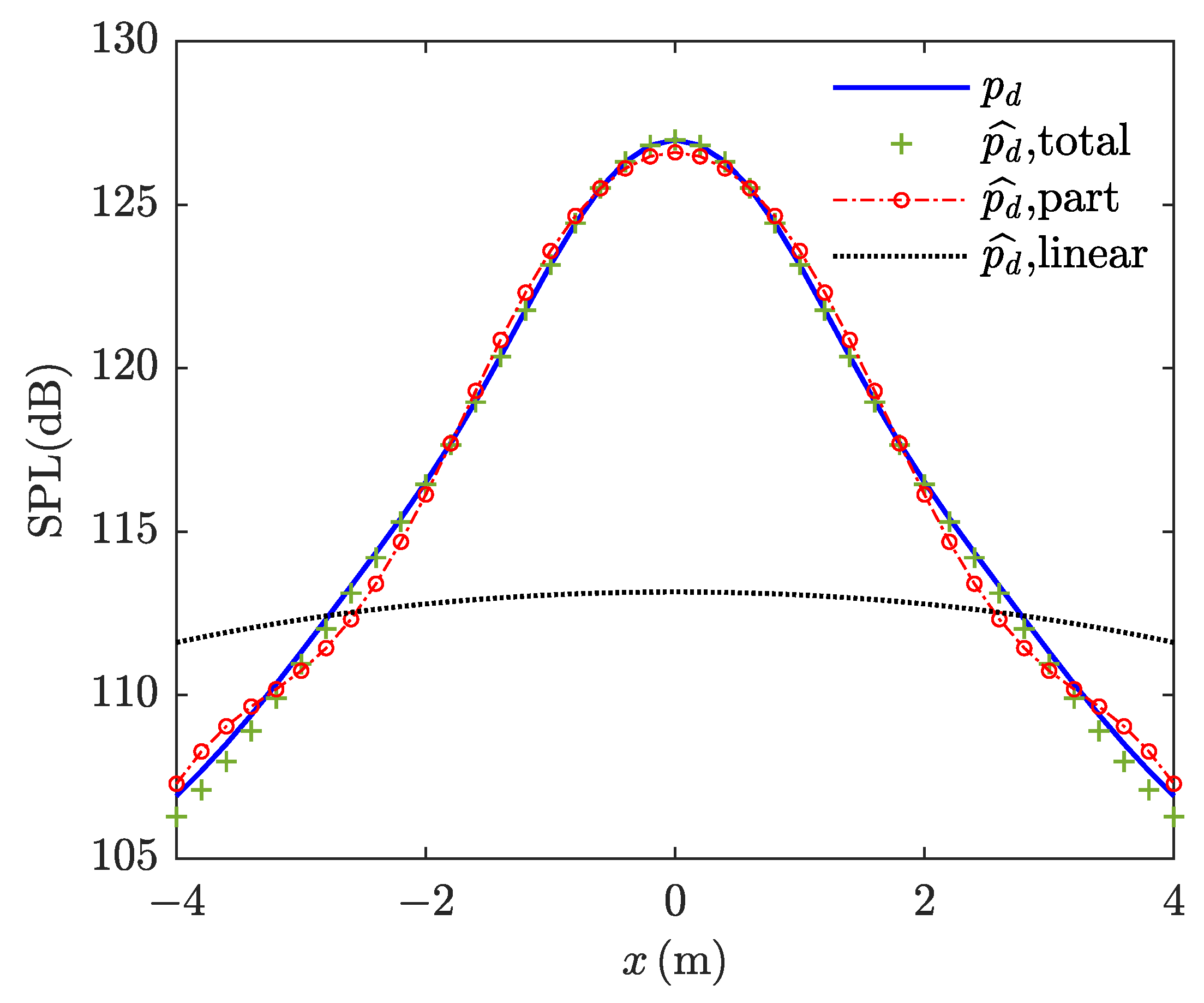
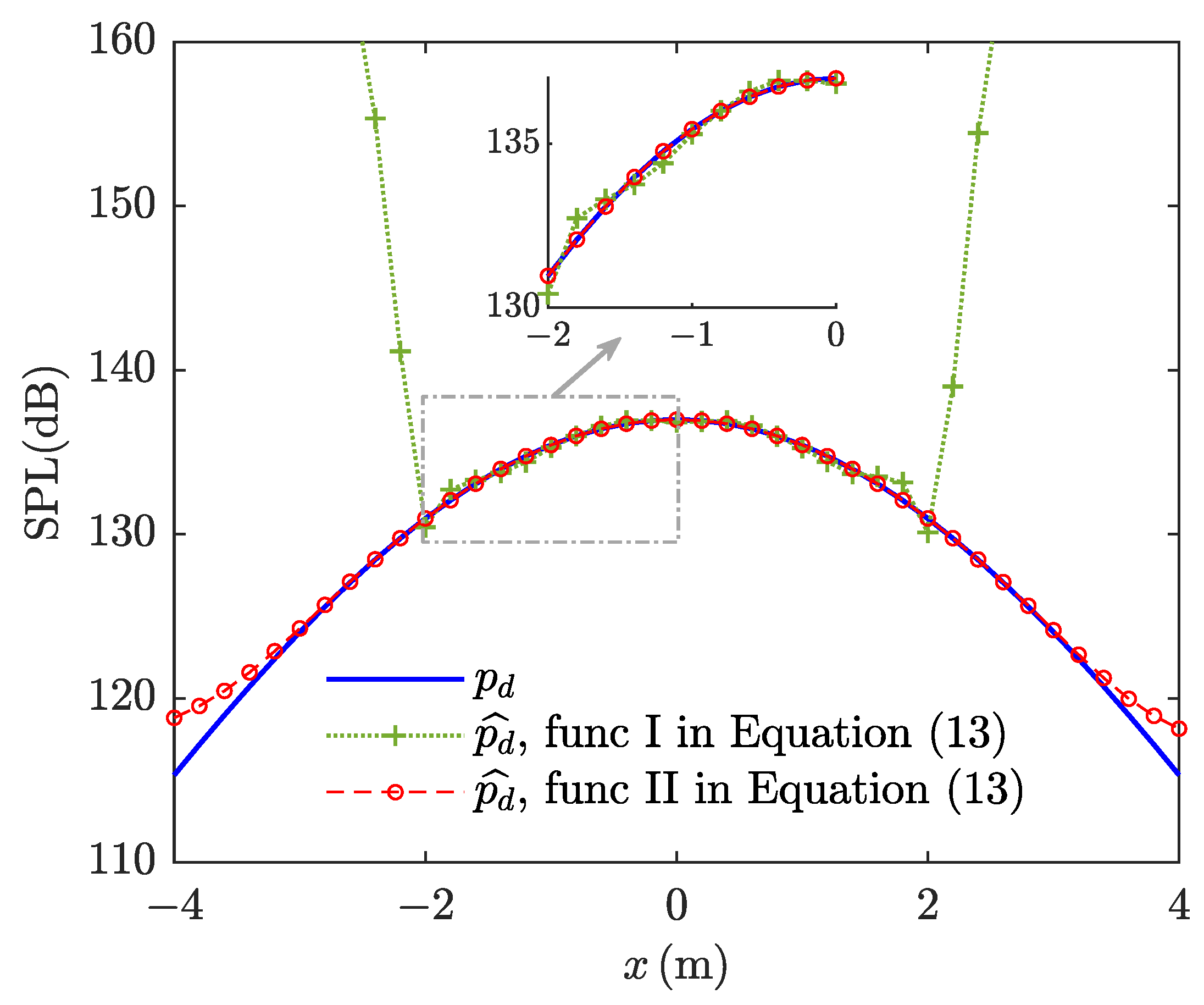
3.2. Estimation of Acoustic Transfer Function
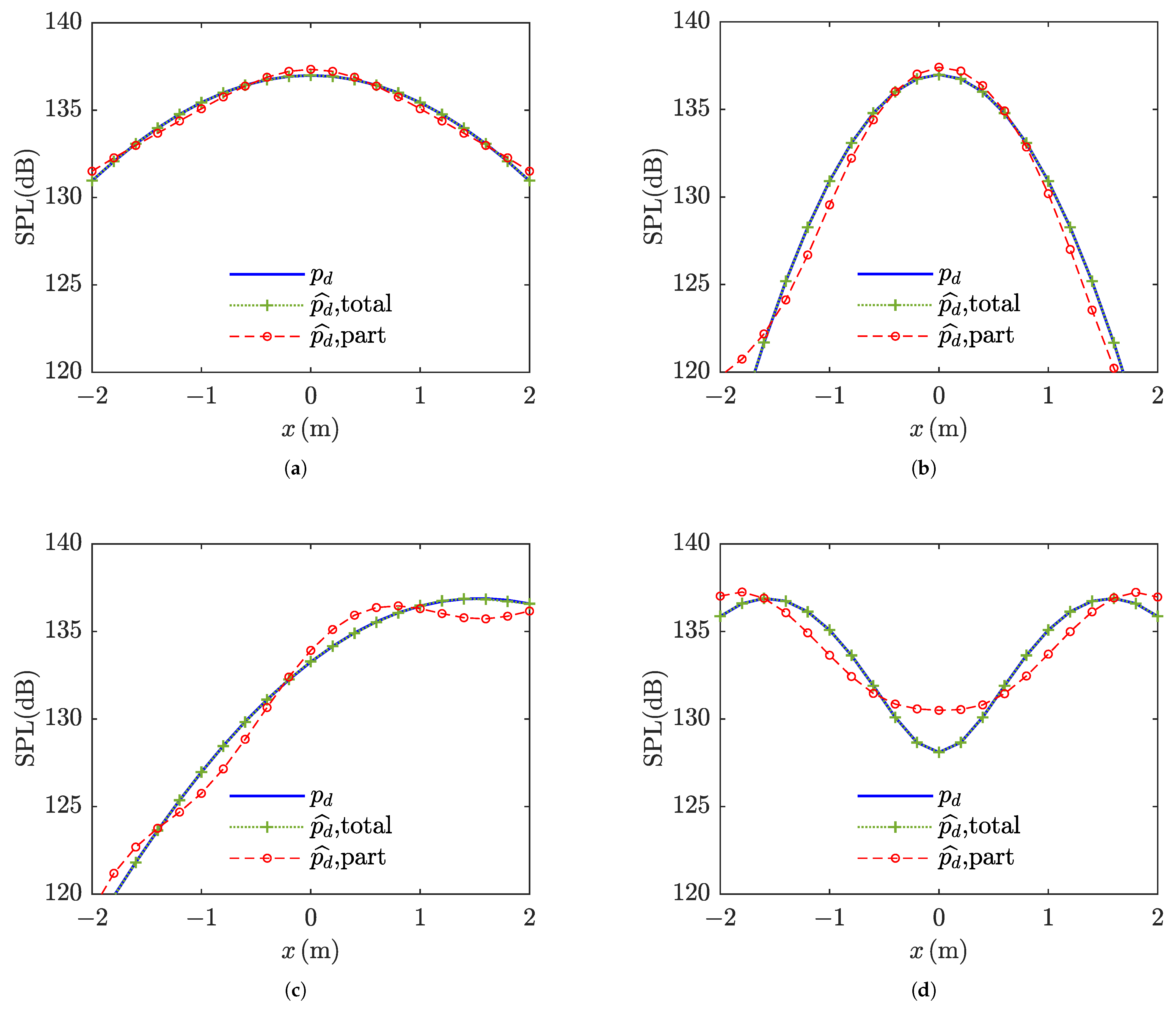
3.3. Beamforming Effect of Multiple Parametric Arrays
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cai, Y.; Wu, M.; Yang, J. Sound reproduction in personal audio systems using the least-squares approach with acoustic contrast control constraint. J. Acoust. Soc. Am. 2014, 135, 734–741. [Google Scholar] [CrossRef]
- Demi, L.; Verweij, M.D.; van Dongen, K.W.A. Parallel Transmit Beamforming Using Orthogonal Frequency Division Multiplexing Applied to Harmonic Imaging—A Feasibility Study. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 2439–2447. [Google Scholar] [CrossRef]
- Sharaga, N.; Tabrikian, J.; Messer, H. Optimal Cognitive Beamforming for Target Tracking in MIMO Radar/Sonar. IEEE J. Sel. Top. Signal Process. 2015, 9, 1440–1450. [Google Scholar] [CrossRef]
- Cuji, D.A.; Stojanovic, M. Transmit Beamforming for Underwater Acoustic OFDM Systems. IEEE J. Ocean. Eng. 2024, 49, 145–162. [Google Scholar] [CrossRef]
- Westervelt, P.J. Parametric Acoustic Array. J. Acoust. Soc. Am. 1963, 35, 535–537. [Google Scholar] [CrossRef]
- Gan, W.S.; Yang, J.; Kamakura, T. A review of parametric acoustic array in air. Appl. Acoust. 2012, 73, 1211–1219. [Google Scholar] [CrossRef]
- Zhou, H.; Huang, S.H.; Li, W. Parametric Acoustic Array and Its Application in Underwater Acoustic Engineering. Sensors 2020, 20, 2148. [Google Scholar] [CrossRef]
- Geng, Y.; Nakayama, M.; Nishiura, T. Narrow-edged beamforming based on individual phase inversion in amplitude-modulated wave for parametric array loudspeaker. Appl. Acoust. 2022, 200, 109060. [Google Scholar] [CrossRef]
- Jiménez, N.; Ealo, J.; Muelas-Hurtado, R.D.; Duclos, A.; Romero-García, V. A helicoidal parametric antenna for subwavelength vortex generation. Proc. Mtgs. Acoust. 2022, 48, 045001. [Google Scholar]
- Zhu, Y.; Ma, W.; Kuang, Z.; Wu, M.; Yang, J. Optimal audio beam pattern synthesis for an enhanced parametric array loudspeaker. J. Acoust. Soc. Am. 2023, 154, 3210–3222. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, Y.; Fan, F.; Ma, W.; Qin, L.; Kuang, Z.; Wu, M.; Yang, J. An enhanced beamsteering algorithm based on MVDR for a multi-channel parametric array loudspeaker array. J. Sound Vib. 2025, 595, 118768. [Google Scholar] [CrossRef]
- Kelly, M.; McKinley, M.; Liu, G.; Shi, C. Evaluation of inner product-based demultiplexing of vortex-based underwater acoustic communications signals in realistic environments. J. Acoust. Soc. Am. 2024, 156, 3112–3117. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, G.; Tang, S.; Yin, J.; Guo, L.; Sheng, X.; Li, M. Directional bionic underwater communication method using a parametric acoustic array and recursive filtering. Appl. Acoust. 2022, 191, 108665. [Google Scholar] [CrossRef]
- Yang, J.; Gan, W.S.; Tan, K.S.; Er, M.H. Acoustic beamforming of a parametric speaker comprising ultrasonic transducers. Sens. Actuators A Phys. 2005, 125, 91–99. [Google Scholar] [CrossRef]
- Zhong, J.; Zou, H.; Lu, J.; Zhang, D. A modified convolution model for calculating the far field directivity of a parametric array loudspeaker. J. Acoust. Soc. Am. 2023, 153, 1439–1451. [Google Scholar] [CrossRef]
- Tang, K.; Wang, Y.; Wang, S.; Gao, D.; Li, H.; Liang, X.; Sebbah, P.; Li, Y.; Zhang, J.; Shi, J. Hyperuniform Disordered Parametric Loudspeaker Array. Phys. Rev. Appl. 2023, 19, 054035. [Google Scholar] [CrossRef]
- Skinner, E.; Groves, M.; Hinders, M.K. Demonstration of a length limited parametric array. Appl. Acoust. 2019, 148, 423–433. [Google Scholar] [CrossRef]
- Nomura, H.; Nakagawa, T. Distortion reduction of length-limited sound beam generated by parametric acoustic array. Appl. Acoust. 2025, 230, 110425. [Google Scholar] [CrossRef]
- Zhu, Y.; Qin, L.; Ma, W.; Fan, F.; Wu, M.; Kuang, Z.; Yang, J. A nonlinear sound field control method for a multi-channel parametric array loudspeaker array. J. Acoust. Soc. Am. 2025, 157, 962–975. [Google Scholar] [CrossRef]
- Cervenka, M.; Li, W.; Huang, S.H. Non-paraxial model for a parametric acoustic array. J. Acoust. Soc. Am. 2013, 134, 933–938. [Google Scholar] [CrossRef]
- Červenka, M.; Bednařík, M.; Koníček, P. Numerical simulation of parametric field patterns of ultrasonic transducer arrays. In Proceedings of the 2009 IEEE International Ultrasonics Symposium, Rome, Italy, 20–23 September 2009. [Google Scholar]
- Xu, L.; Zhang, H.; Zhang, M. Training a Deep Operator Network as a Surrogate Solver for Two-Dimensional Parabolic-Equation Models. J. Acoust. Soc. Am. 2023, 154, 3276–3284. [Google Scholar] [CrossRef] [PubMed]
- Kopp, L.; Cano, D.; Dubois, E.; Wang, L.; Smith, B.; Coates, R.F. Potential performance of parametric communications. IEEE J. Oceanic Eng. 2000, 25, 282–295. [Google Scholar] [CrossRef]
- Zhong, J.X.; Kirby, R.; Qiu, X.J. The near field, Westervelt far field, and inverse-law far field of the audio sound generated by parametric array loudspeakers. J. Acoust. Soc. Am. 2021, 143, 1524–1535. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.Y.; Li, W.; Huang, S.H. Signal Processing Algorithm and System Realization of Broadband Parametric Array Sub-Bottom Profiler. IEEE Sensors J. 2022, 22, 17090–17102. [Google Scholar] [CrossRef]
- Li, M.; Zhong, J.; Jing, Y.; Lu, J. A note on the audio sound power generated by a parametric array loudspeaker. J. Acoust. Soc. Am. 2023, 154, 3899–3905. [Google Scholar] [CrossRef]
- Chen, H.; Zhu, Z.; Yang, D. Conventional Beamforming Algorithm Based on Polarization Filtering for an Acoustic Vector-Sensor Linear Array Mounted Near a Baffle. IEEE J. Ocean. Eng. 2024, 49, 1127–1139. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | ||
|---|---|---|
| 1 | − 8.636 − 11.994j | 2.471 + 9.361j |
| 2 | −0.701 + 5.069j | 3.273 + 2.222j |
| 3 | 0.387 + 0.600j | 2.014 − 6.381j |
| 4 | −0.932 − 4.006j | 3.104 − 2.246j |
| 5 | 3.674 + 8.678j | 3.221 − 11.464j |
| 6 | 2.258 + 7.653j | 2.200 + 9.692j |
| 7 | −0.115 + 0.070j | 1.150 − 17.475j |
| 8 | 8.287 + 3.086j | 2.946 + 8.496j |
| 9 | −0.107 + 0.089j | 1.120 + 16.248j |
| 10 | −3.135 − 9.191j | 3.289 − 11.143j |
| Beam Type | SPL RMSE of Total Scheme | SPL RMSE of Part Scheme |
|---|---|---|
| wide beam | 0.01 | 0.30 |
| narrow beam | 0.01 | 1.83 |
| steered beam | 0.02 | 0.87 |
| notched beam | 0.01 | 1.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Shi, J.; Fan, B.; Zhang, H. A Low-Complexity Versatile Beamforming Method for Multiple Parametric Arrays. Acoustics 2025, 7, 37. https://doi.org/10.3390/acoustics7020037
Shi H, Shi J, Fan B, Zhang H. A Low-Complexity Versatile Beamforming Method for Multiple Parametric Arrays. Acoustics. 2025; 7(2):37. https://doi.org/10.3390/acoustics7020037
Chicago/Turabian StyleShi, Haokang, Jie Shi, Bo Fan, and Haoyang Zhang. 2025. "A Low-Complexity Versatile Beamforming Method for Multiple Parametric Arrays" Acoustics 7, no. 2: 37. https://doi.org/10.3390/acoustics7020037
APA StyleShi, H., Shi, J., Fan, B., & Zhang, H. (2025). A Low-Complexity Versatile Beamforming Method for Multiple Parametric Arrays. Acoustics, 7(2), 37. https://doi.org/10.3390/acoustics7020037